Módulo Sensor IMU Yahboom 6/9/10 Ejes AHRS, ROS1 ROS2, IIC/UART, Type-C para Jetson/Raspberry Pi
Módulo Sensor IMU Yahboom 6/9/10 Ejes AHRS, ROS1 ROS2, IIC/UART, Type-C para Jetson/Raspberry Pi
Yahboom
No se pudo cargar la disponibilidad de retiro
Resumen
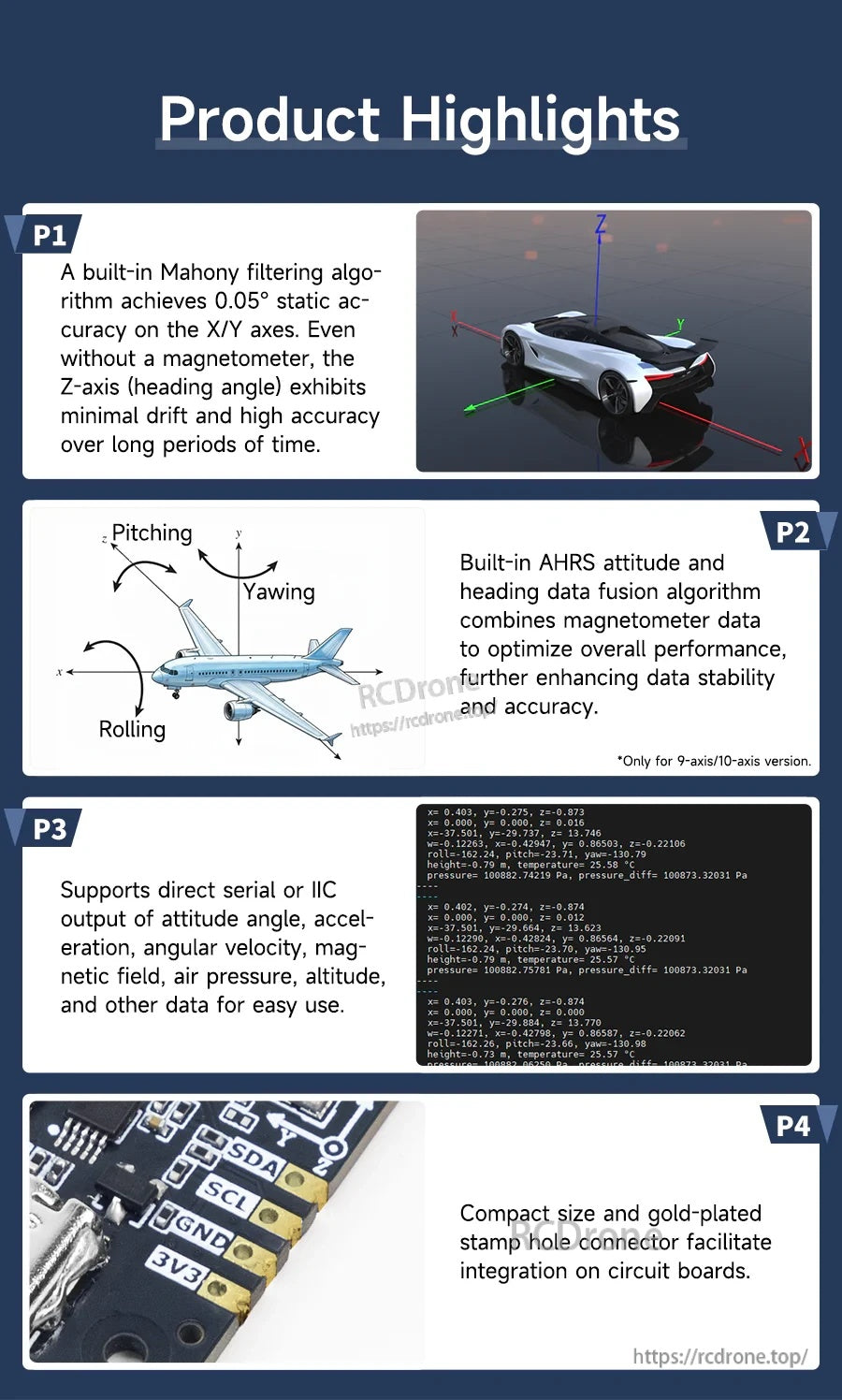
Módulos de sensores IMU Yahboom (6-ejes / 9-ejes / 10-ejes) integran sensores MEMS multi-ejes con un procesador de alto rendimiento de 32 bits y 72MHz para el cálculo de actitud AHRS en tiempo real y compensación dinámica. Al fusionar datos de giroscopio, acelerómetro, magnetómetro (9/10-ejes) y barómetro (10-ejes), el módulo proporciona datos de movimiento/actitud que incluyen rollo, cabeceo y guiñada para aplicaciones de robótica, drones, agricultura inteligente y navegación. Soporta comunicación IIC (I2C) y UART (serial), conexiones Type-C y de cabezal de pines, y un amplio voltaje de entrada de 3.3V/5V.
Características Clave
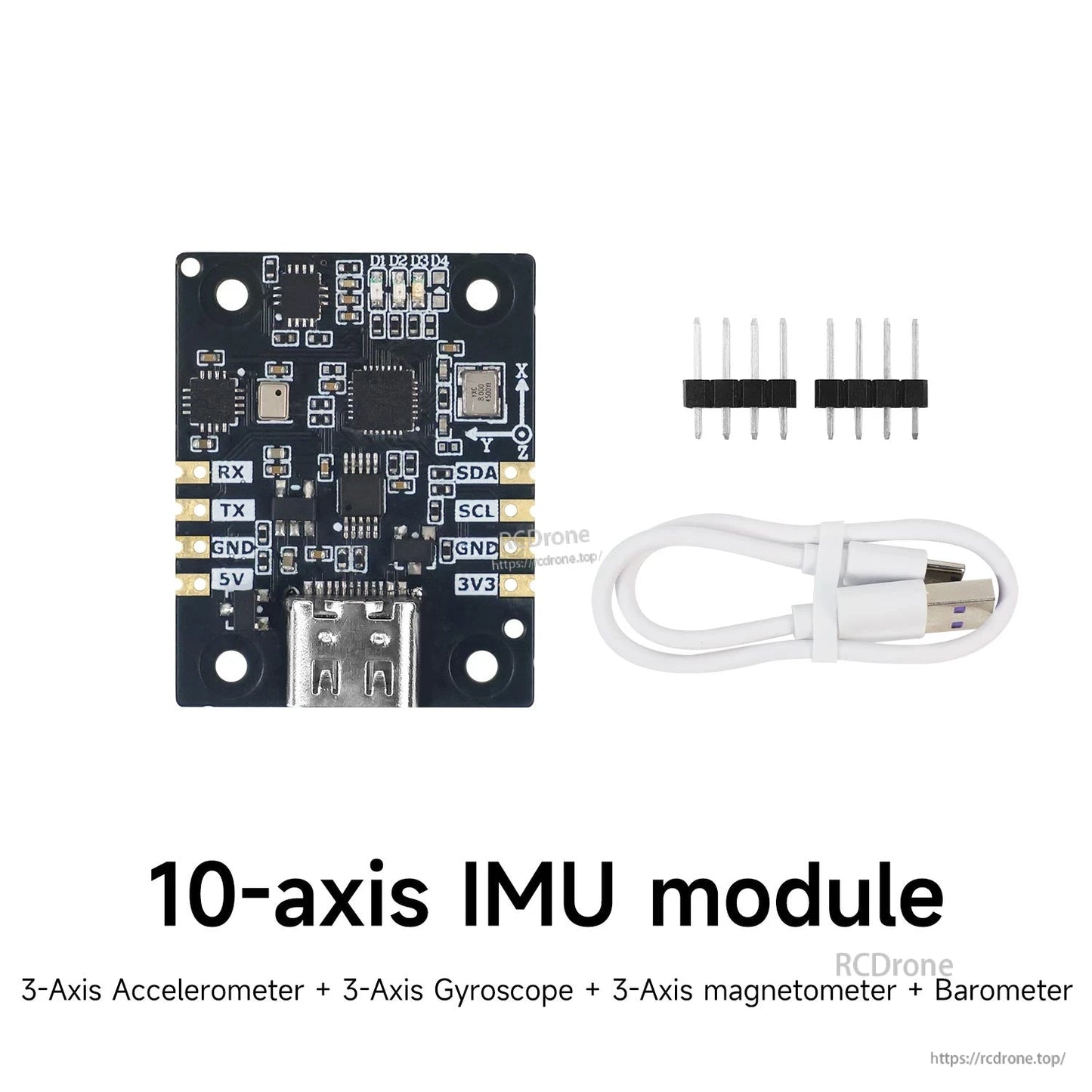
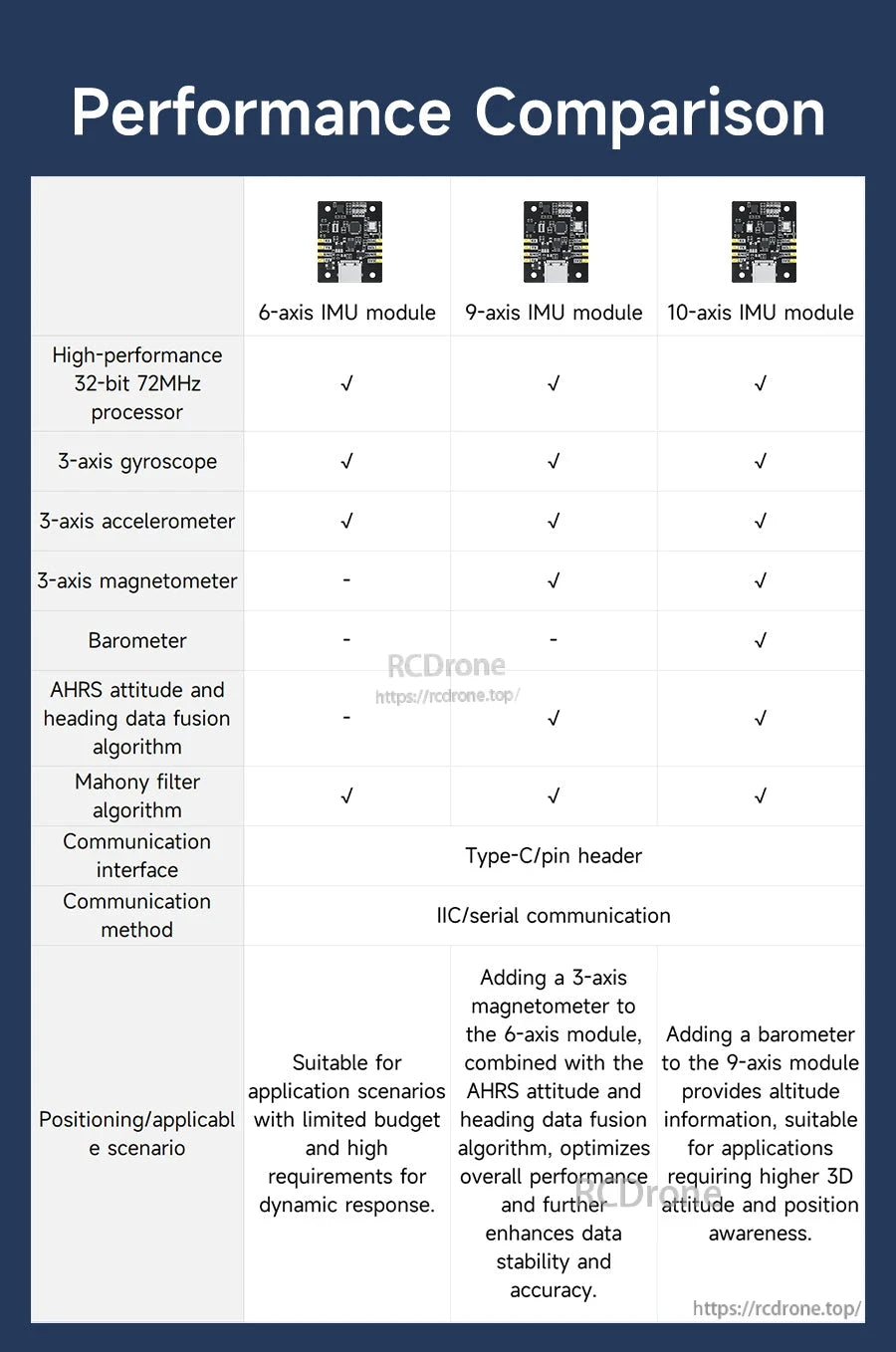
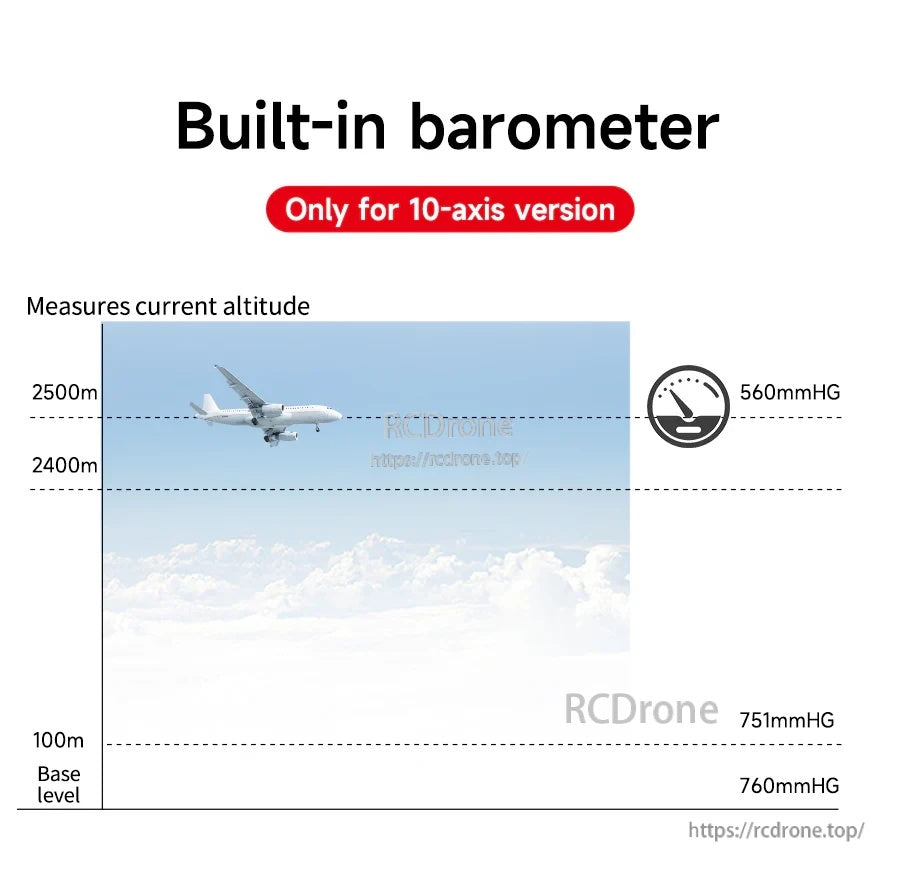
- Opciones de conteo de ejes: 6-ejes (3-ejes giroscopio + 3-ejes acelerómetro), 9-ejes (+ 3-ejes magnetómetro), 10-ejes (+ barómetro para datos relacionados con la altitud).
- Múltiples salidas: Ángulos de Euler, cuaterniones, velocidad angular en 3 ejes, aceleración en 3 ejes; datos del magnetómetro en 3 ejes (9/10 ejes); presión barométrica/altitud y temperatura (10 ejes).
- Algoritmos integrados: Algoritmo de filtro Mahony; algoritmo de fusión de datos de actitud y rumbo AHRS (modelos de 9/10 ejes según lo especificado); algunos modelos enumeran el algoritmo de fusión DMP Pose.
- Interfaces: Comunicación IIC/serial; conexiones tipo C y de pines (dependiendo del modelo según lo especificado).
- Soporte del ecosistema ROS: Modelos seleccionados soportan ROS1/ROS2, incluyendo casos de uso de visualización RViz.
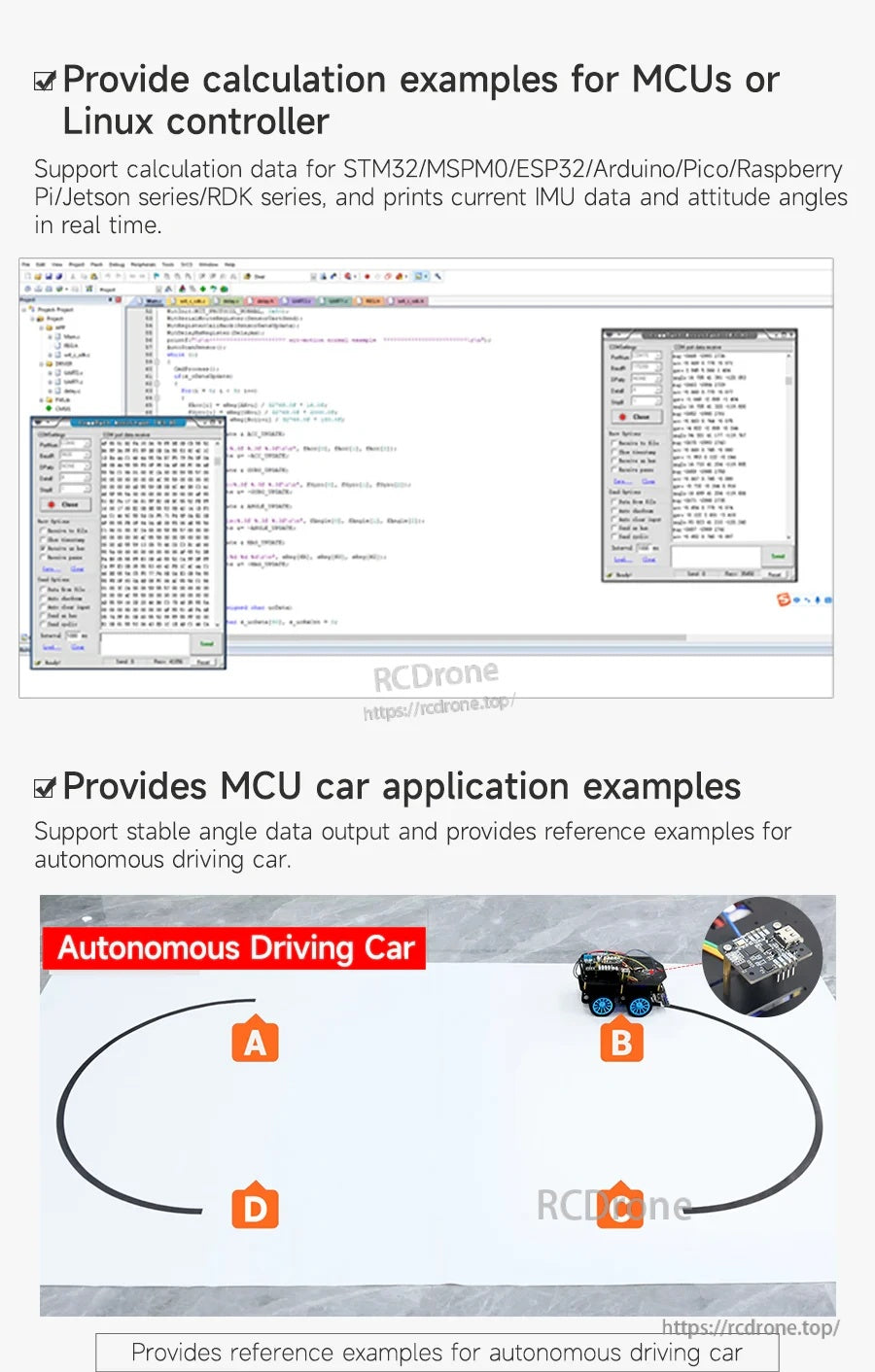
- Plataformas de ejemplo mencionadas: Arduino, Raspberry Pi, STM32, ESP32, Jetson, RDK, MSPM0, PC.
Especificaciones
| Versión / Módulo | Sensores | Salida de Datos | Interfaz de Comunicación | Velocidad de Comunicación IIC | Velocidad de Comunicación Serial | Algoritmo Integrado | Soporte Ecológico ROS | Extensión Externa | Dimensiones | Peso |
|---|---|---|---|---|---|---|---|---|---|---|
| Sensor de 6 ejes MPU-6050 | Giroscopio de 3 ejes + Acelerómetro de 3 ejes | Aceleración, Velocidad angular, Ángulo, Cuaternión | Interfaz IIC (conector de pines) | Máximo 400KHz | / | Algoritmo de fusión de pose DMP | / | Se puede conectar a un módulo Magnetómetro externo | 21mm x 16mm | 1.6g |
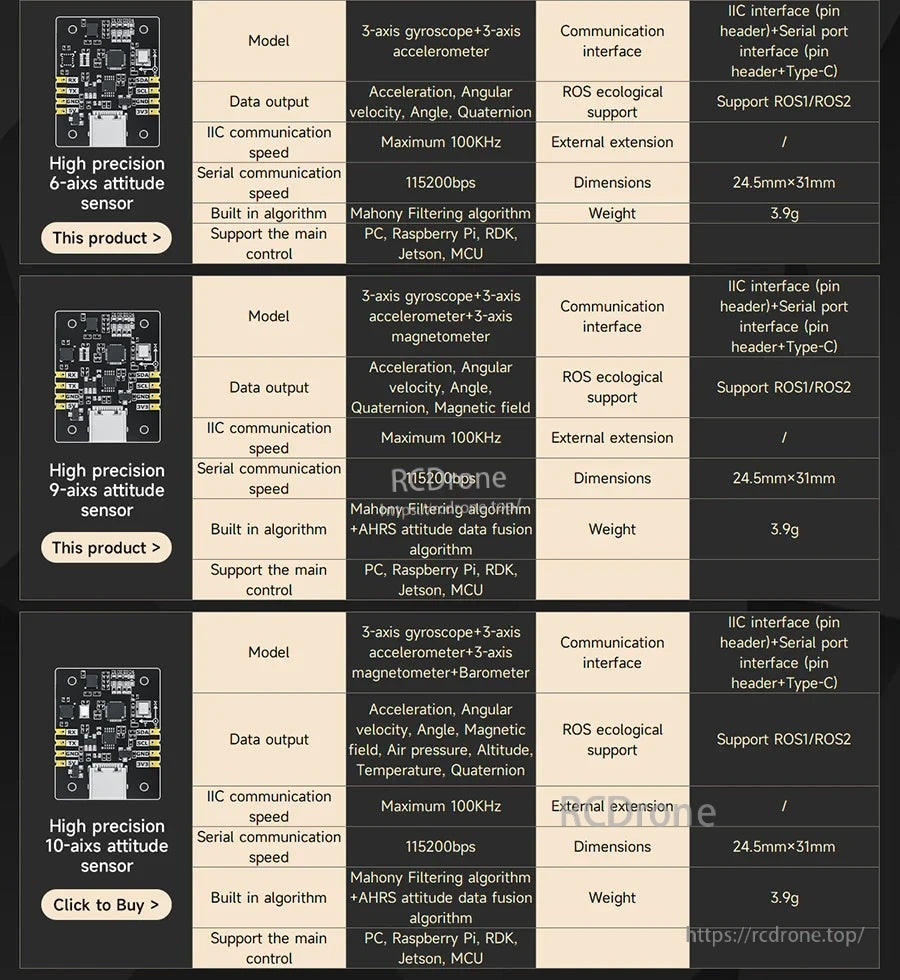
| Sensor de actitud de alta precisión de 6 ejes | Giroscopio de 3 ejes + Acelerómetro de 3 ejes | Aceleración, Velocidad angular, Ángulo, Cuaternión | Interfaz IIC (conector de pines) + Interfaz de puerto serie (conector de pines) + Tipo-C | Máximo 100KHz | 115200bps | Algoritmo de filtrado Mahony | Soporte para ROS1/ROS2 | / | 24.5mm x 31mm | 3.9g |
| Sensor de actitud de alta precisión de 9 ejes | Giroscopio de 3 ejes + Acelerómetro de 3 ejes + Magnetómetro de 3 ejes | Aceleración, Velocidad angular, Ángulo, Cuaternión, Campo magnético | Interfaz IIC (conector de pines) + Interfaz de puerto serie (conector de pines) + Tipo-C | Máximo 100KHz | 115200bps | Algoritmo de filtrado Mahony + Algoritmo de fusión de datos de actitud AHRS | Soporte para ROS1/ROS2 | / | 24.5mm x 31mm | 3.9g |
| Sensor de actitud de alta precisión de 10 ejes | Giroscopio de 3 ejes + Acelerómetro de 3 ejes + Magnetómetro de 3 ejes + Barómetro | Aceleración, Velocidad angular, Ángulo, Campo magnético, Presión del aire, Altitud, Temperatura, Cuaternión | Interfaz IIC (conector de pines) + Interfaz de puerto serie (conector de pines) + Tipo-C | Máximo 100KHz | 115200bps | Algoritmo de filtrado de Mahony + Algoritmo de fusión de datos de actitud AHRS | Soporte ROS1/ROS2 | / | 24.5mm x 31mm | 3.9g |
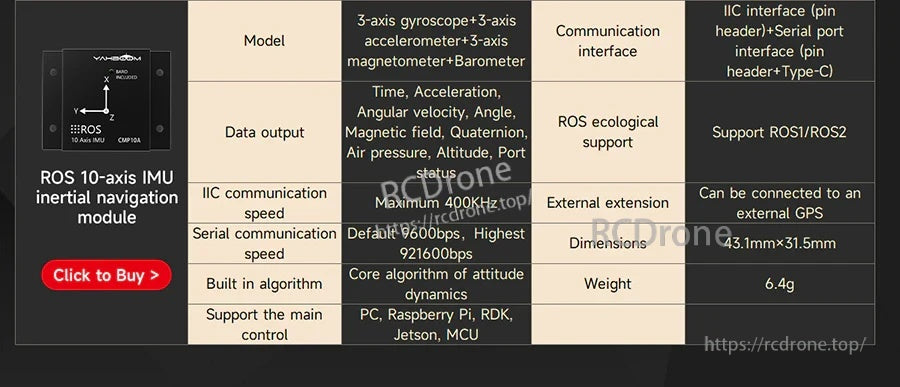
| Módulo de navegación inercial IMU de 10 ejes ROS | Giroscopio de 3 ejes + Acelerómetro de 3 ejes + Magnetómetro de 3 ejes + Barómetro | Tiempo, Aceleración, Velocidad angular, Ángulo, Campo magnético, Cuaternión, Presión del aire, Altitud, Estado del puerto | Interfaz IIC (cabezal de pines) + Interfaz de puerto serie (cabezal de pines) + Tipo-C | Máximo 400KHz | Por defecto 9600bps, Máximo 921600bps | Algoritmo central de dinámica de actitud | Soporta ROS1/ROS2 | Se puede conectar a un GPS externo | 43.1mm x 31.5mm | 6.4g |
Notas adicionales mostradas: la tasa de actualización de datos es de hasta 100Hz (para la serie de sensores de actitud IMU de alta precisión).
Aplicaciones
- Equilibrio de robots, navegación y estabilización de actitud
- Control de vuelo de drones y seguimiento de movimiento
- Visualización de ROS1/ROS2 y display de datos IMU en RViz
- Ejemplos de cálculo de controladores MCU o Linux (STM32/MSPM0/ESP32/Arduino/Pico/Raspberry Pi/serie Jetson/serie RDK)
Para preguntas de integración o compatibilidad (interfaces, uso de ROS o selección de plataforma), contacta [email protected] or visita https://rcdrone.top/ .
Manuales
Tutorial: Módulos de sensor IMU Yahboom
Detalles

Retroalimentación estable de actitud y movimiento para proyectos de robótica, drones y plataformas enfocadas en navegación.

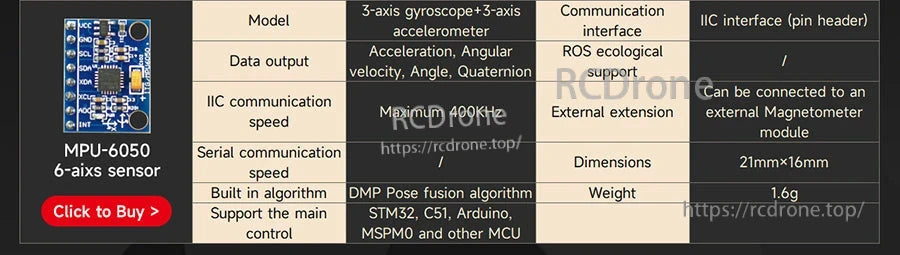
Elige la opción MPU-6050 de 6 ejes cuando necesites un IMU I2C compacto para salida de aceleración, velocidad angular y ángulo/cuaternión.
Tres versiones facilitan la adaptación a su proyecto: 6 ejes para movimiento básico, 9 ejes para dirección y 10 ejes para navegación consciente de la altitud.
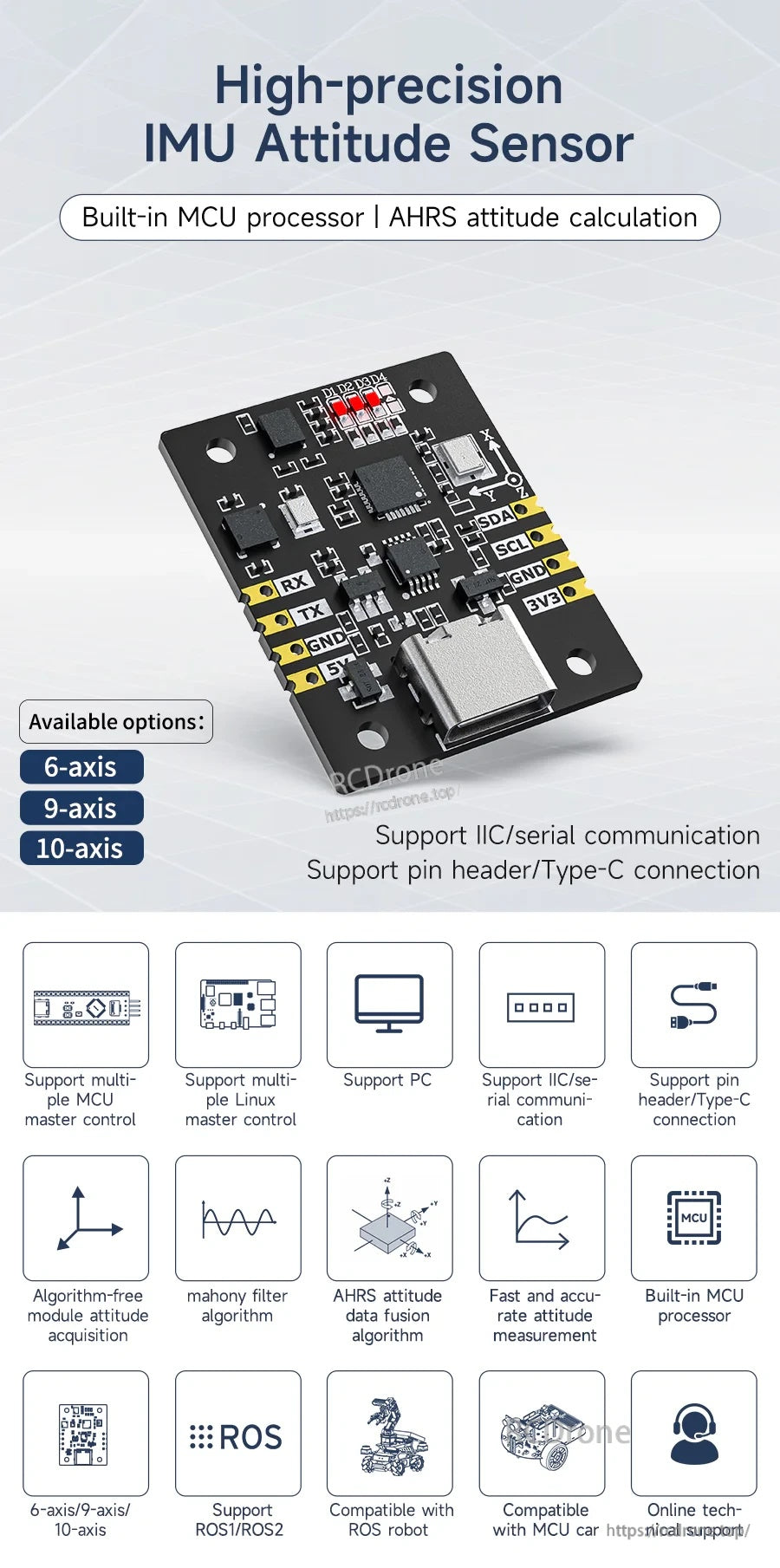
Un MCU integrado permite el cálculo de actitud AHRS en tiempo real con cableado flexible I2C o UART y conectividad Tipo‑C.
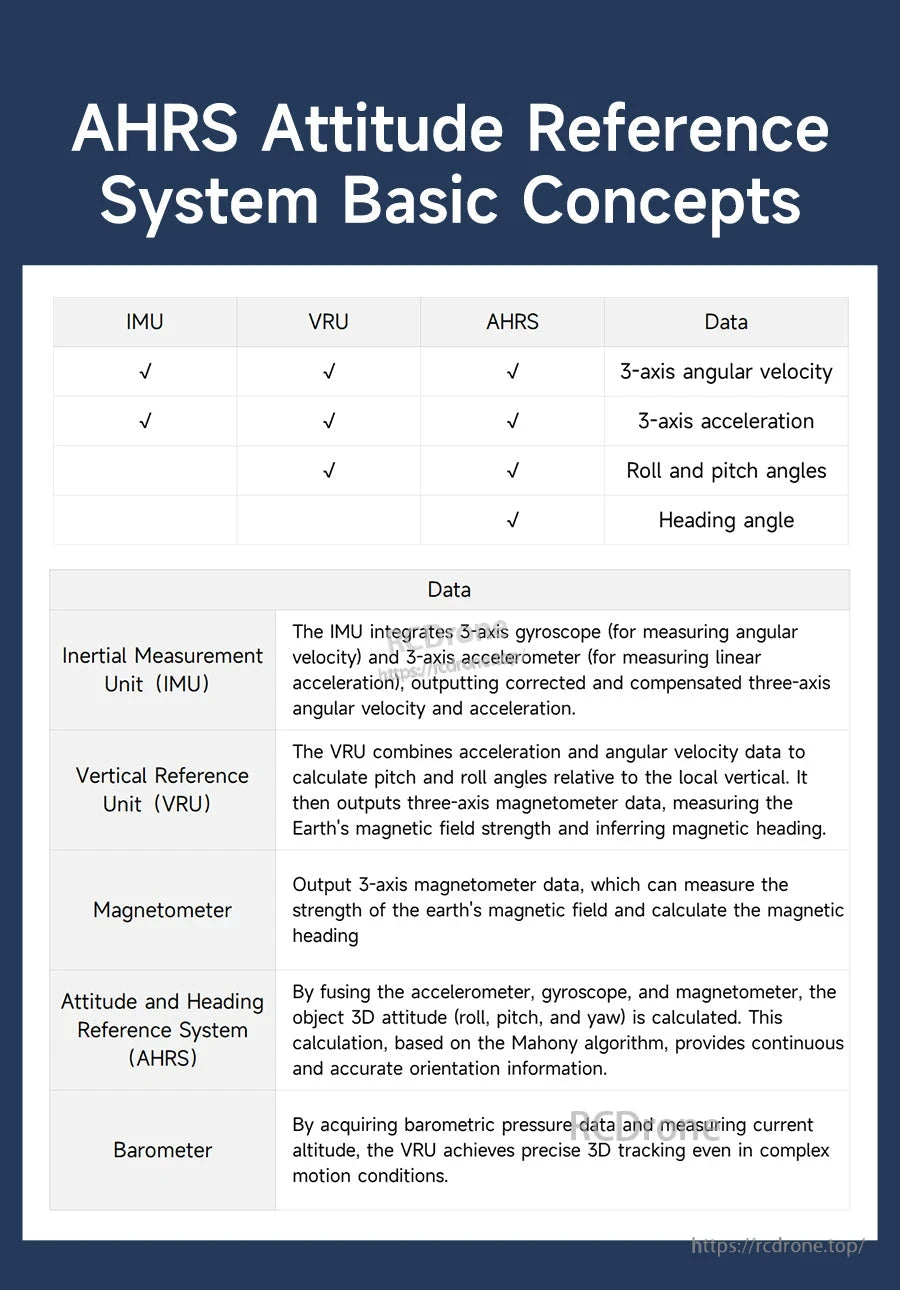
Los conceptos de IMU, VRU y AHRS aclaran qué datos puede esperar: velocidad angular, aceleración, inclinación/altitud y dirección.
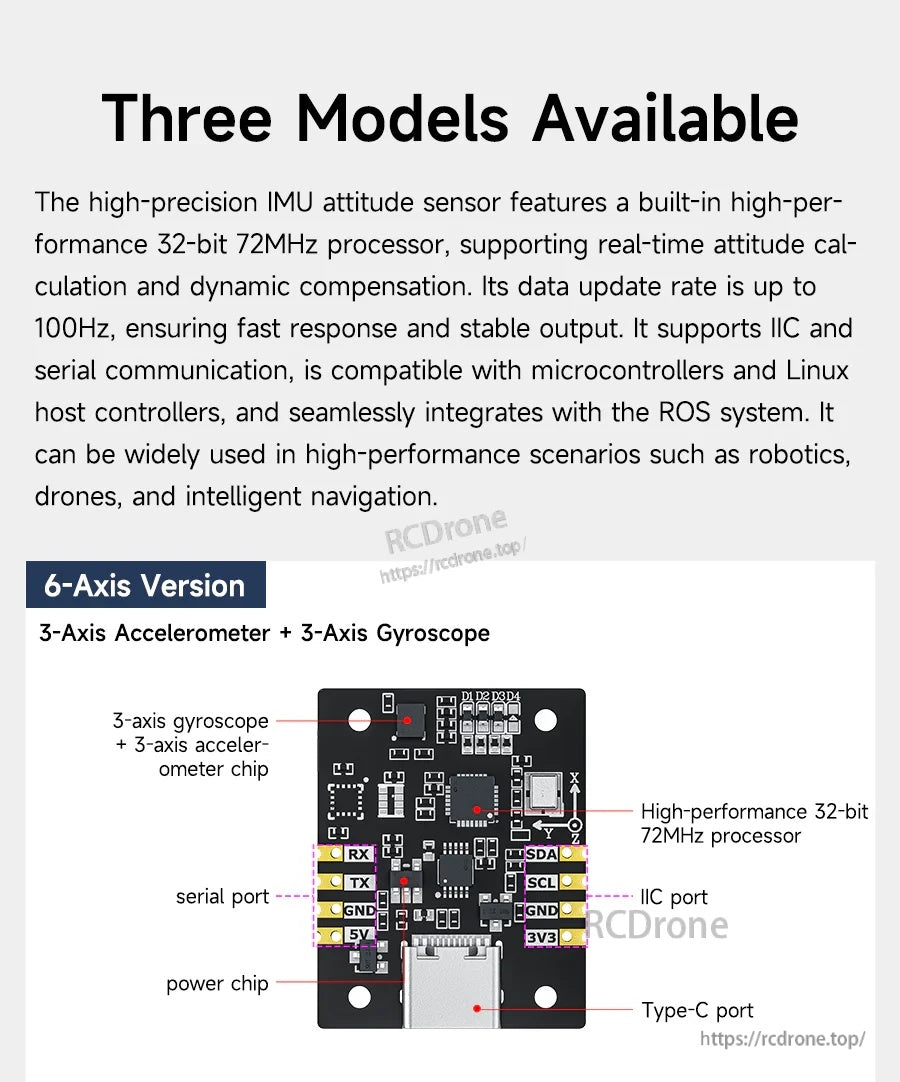
La versión de 6 ejes integra giroscopio + acelerómetro y proporciona acceso claro a puntos de alimentación/conexión UART, I2C y USB‑C.
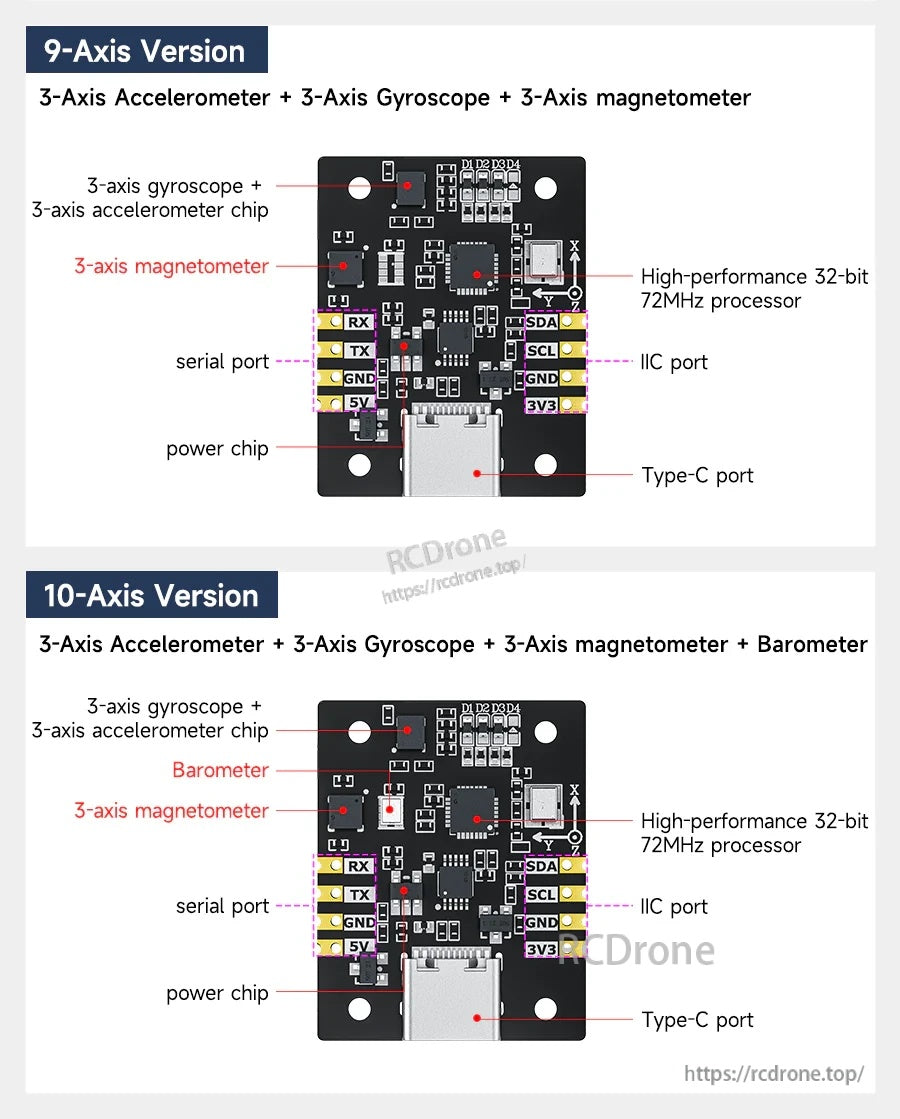
Elija el modelo de 9 ejes para dirección basada en magnetómetro, o el modelo de 10 ejes para agregar datos de barómetro para aplicaciones relacionadas con la altitud.
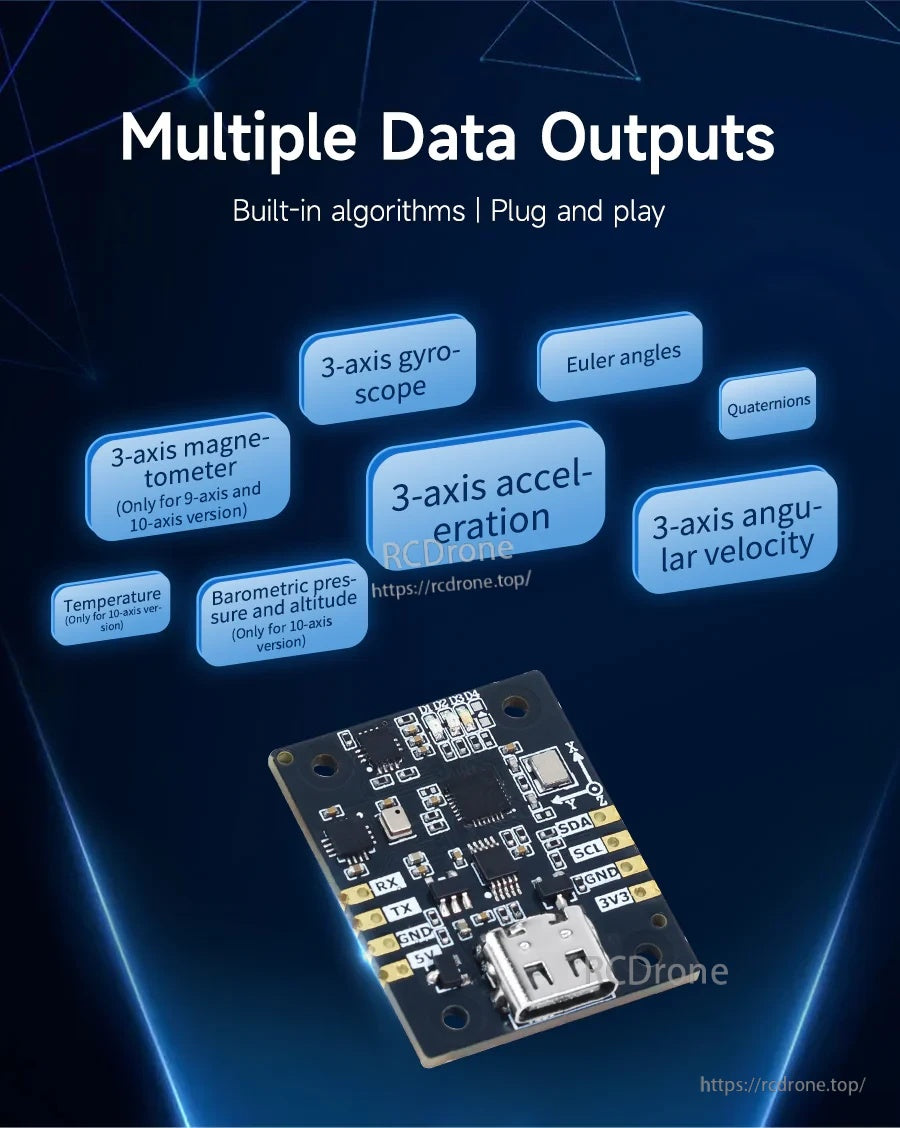
Las opciones de salida incluyen ángulos de Euler, cuaterniones, aceleración de 3 ejes y velocidad angular de 3 ejes, con datos adicionales de magnetómetro/barómetro en versiones de mayor número de ejes.
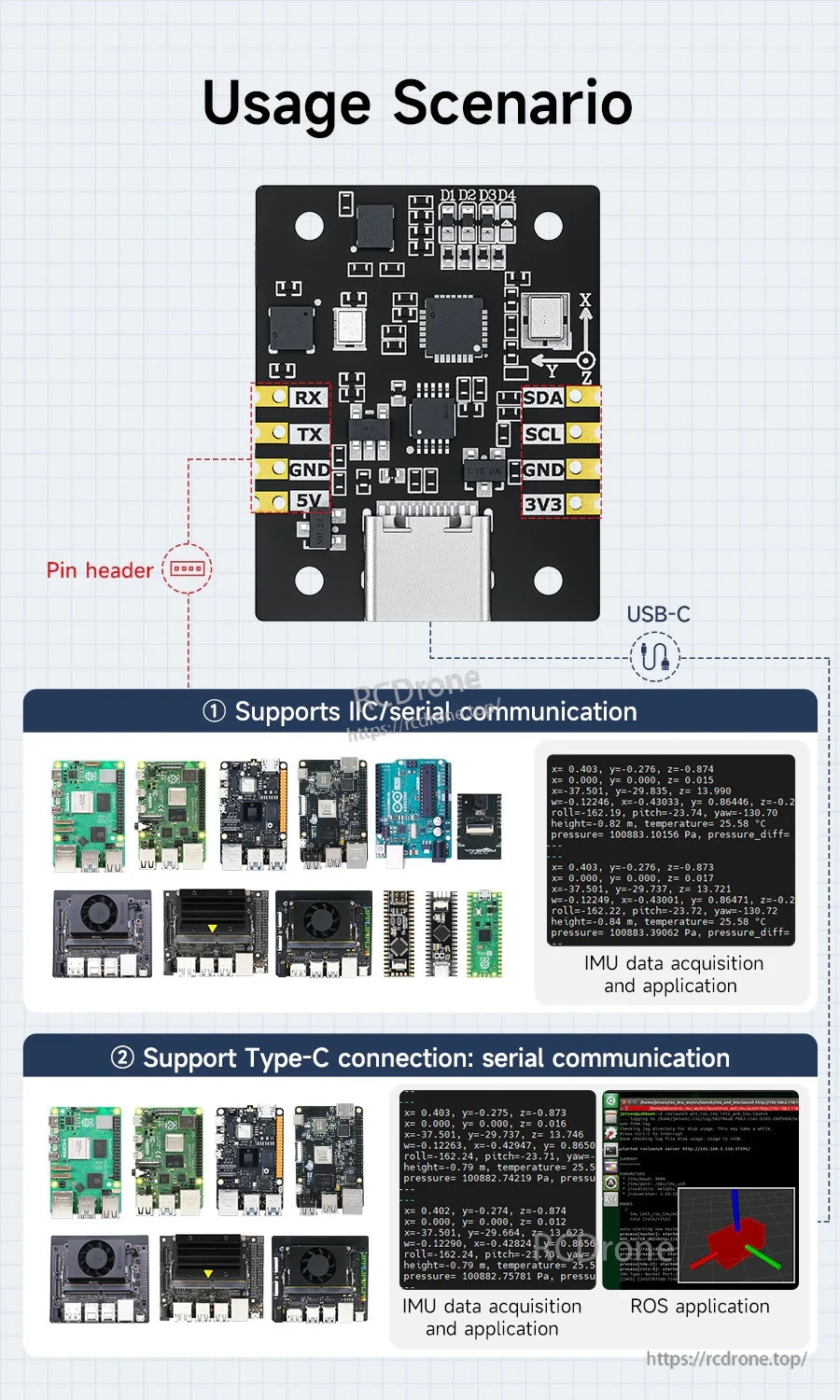
Integre a través de conectores de pines o USB‑C, luego transmita datos IMU a microcontroladores, hosts Linux o herramientas ROS para desarrollo y pruebas.
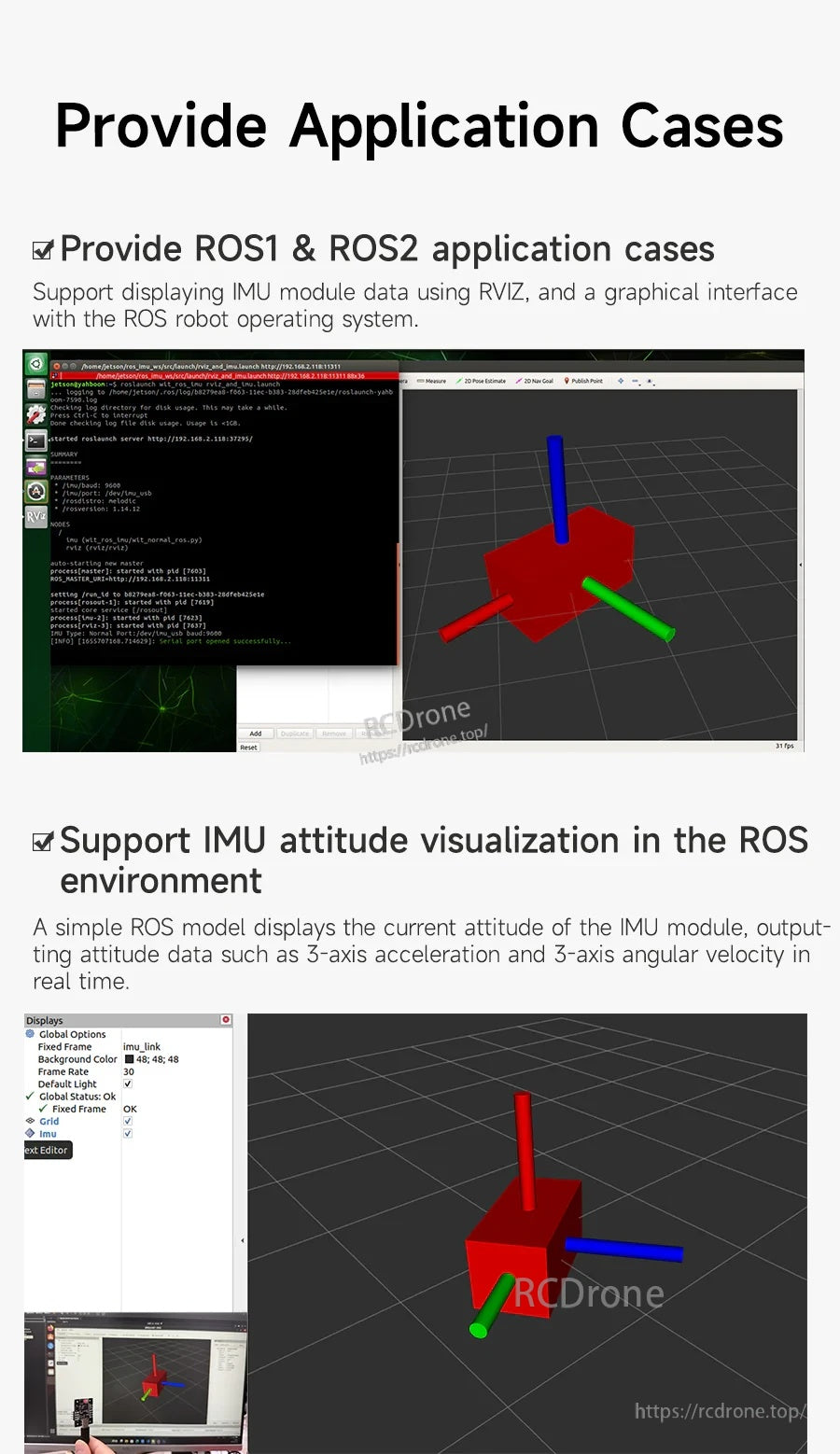
Los ejemplos de ROS1/ROS2 admiten visualización RViz para datos de actitud IMU durante la puesta en marcha y la integración.
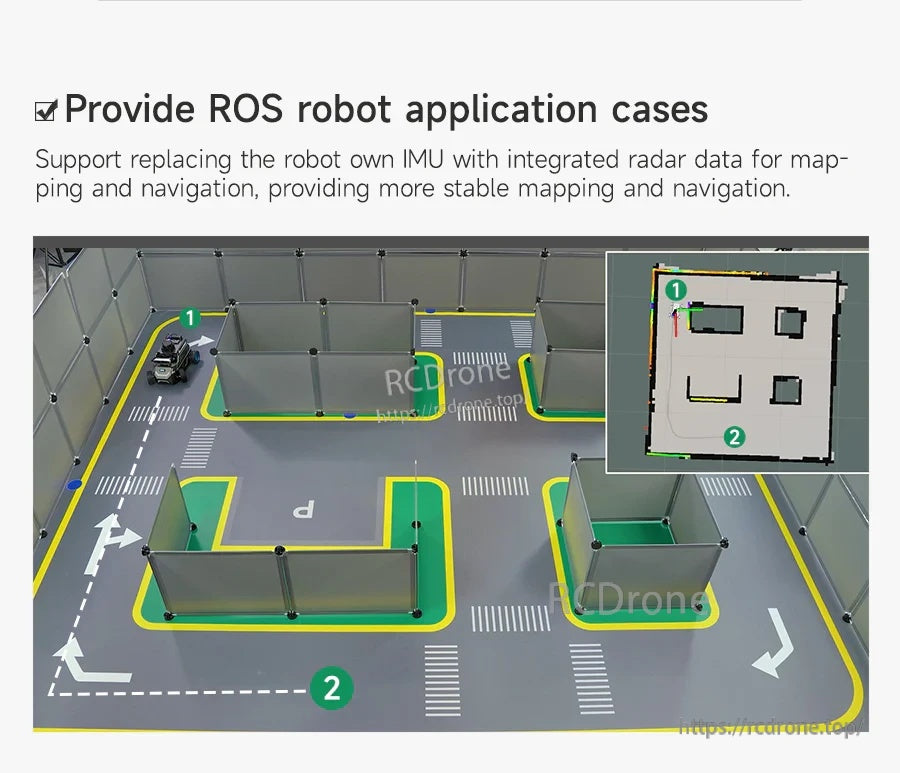
Para robots móviles, la fusión IMU puede mejorar la estabilidad de mapeo y navegación en diseños de cursos interiores típicos.

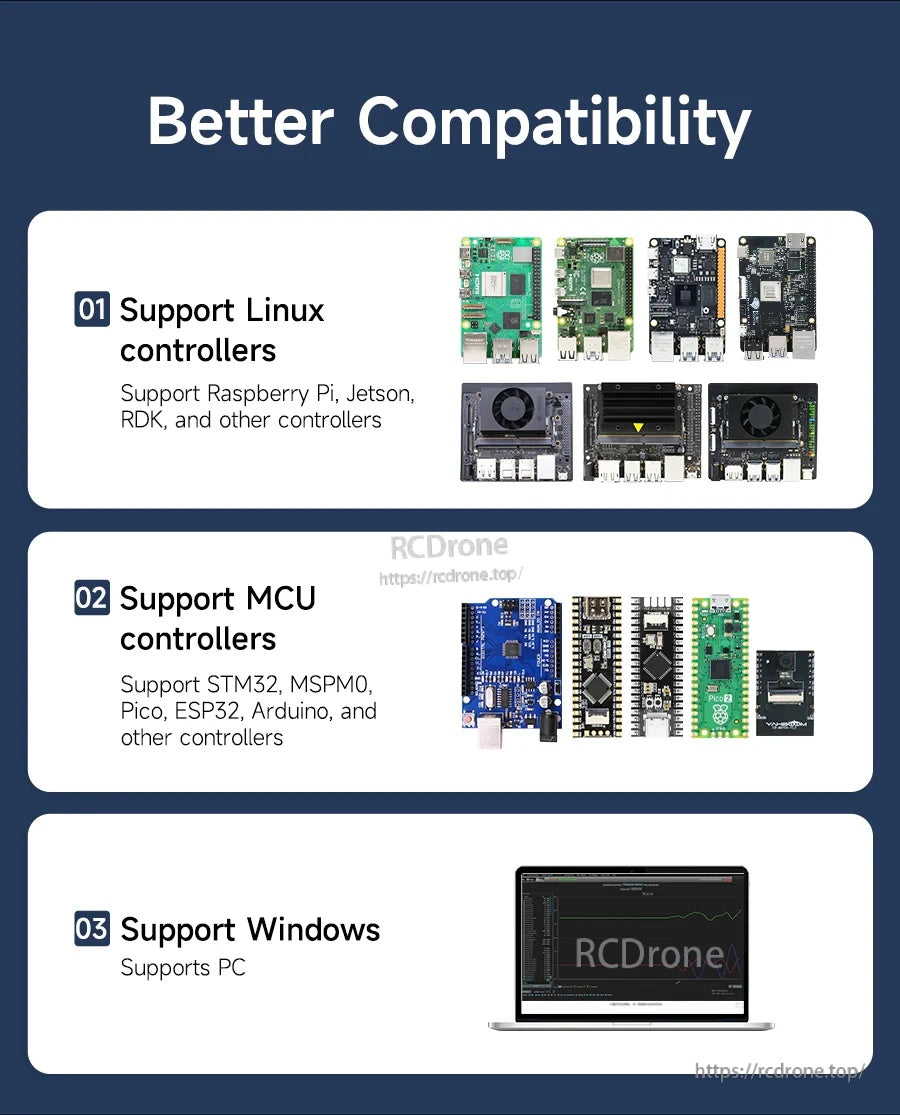
El amplio soporte de controladores le ayuda a prototipar rápidamente en Raspberry Pi/hosts Linux de clase Jetson, MCU comunes o una PC con Windows.

El módulo de sensor IMU de Yahboom se presenta con compatibilidad ROS1 y ROS2 para flujos de trabajo de desarrollo robótico.
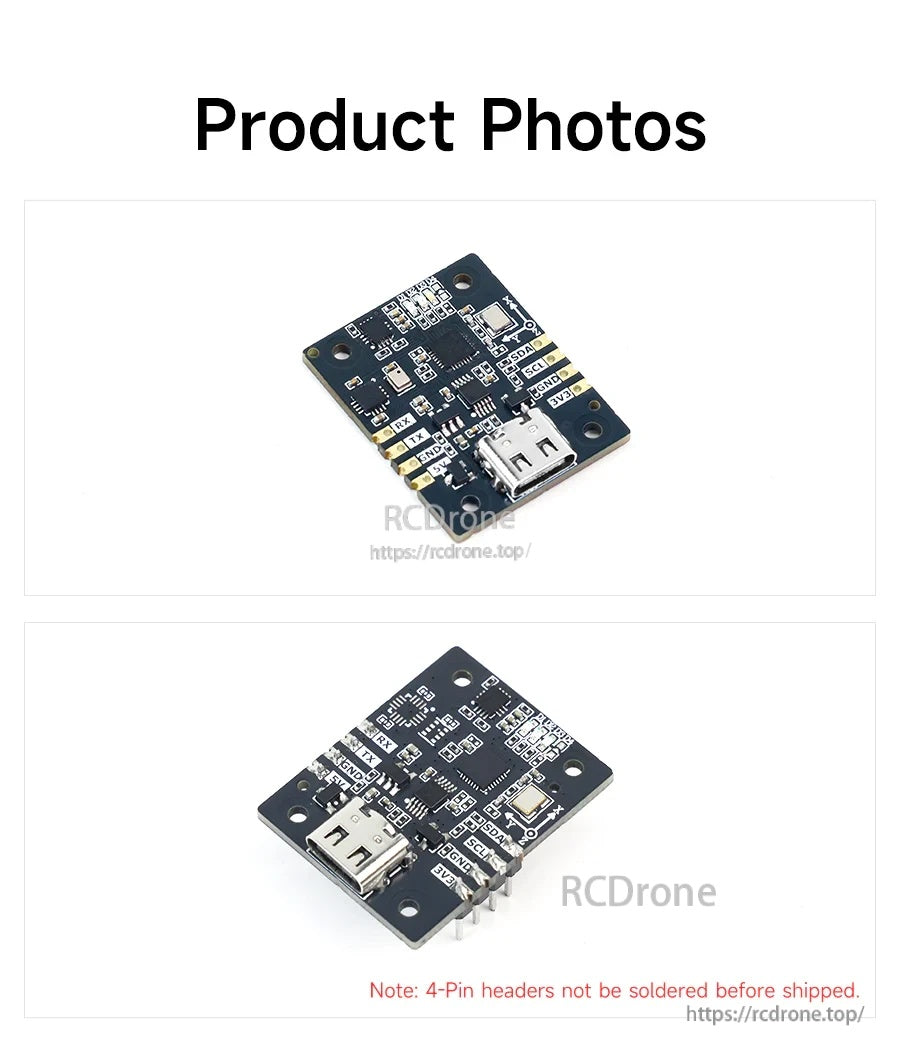
El sensor IMU de Yahboom admite salida de actitud y rumbo AHRS y utiliza pads SDA/SCL I2C para una integración sencilla en placas de circuito.
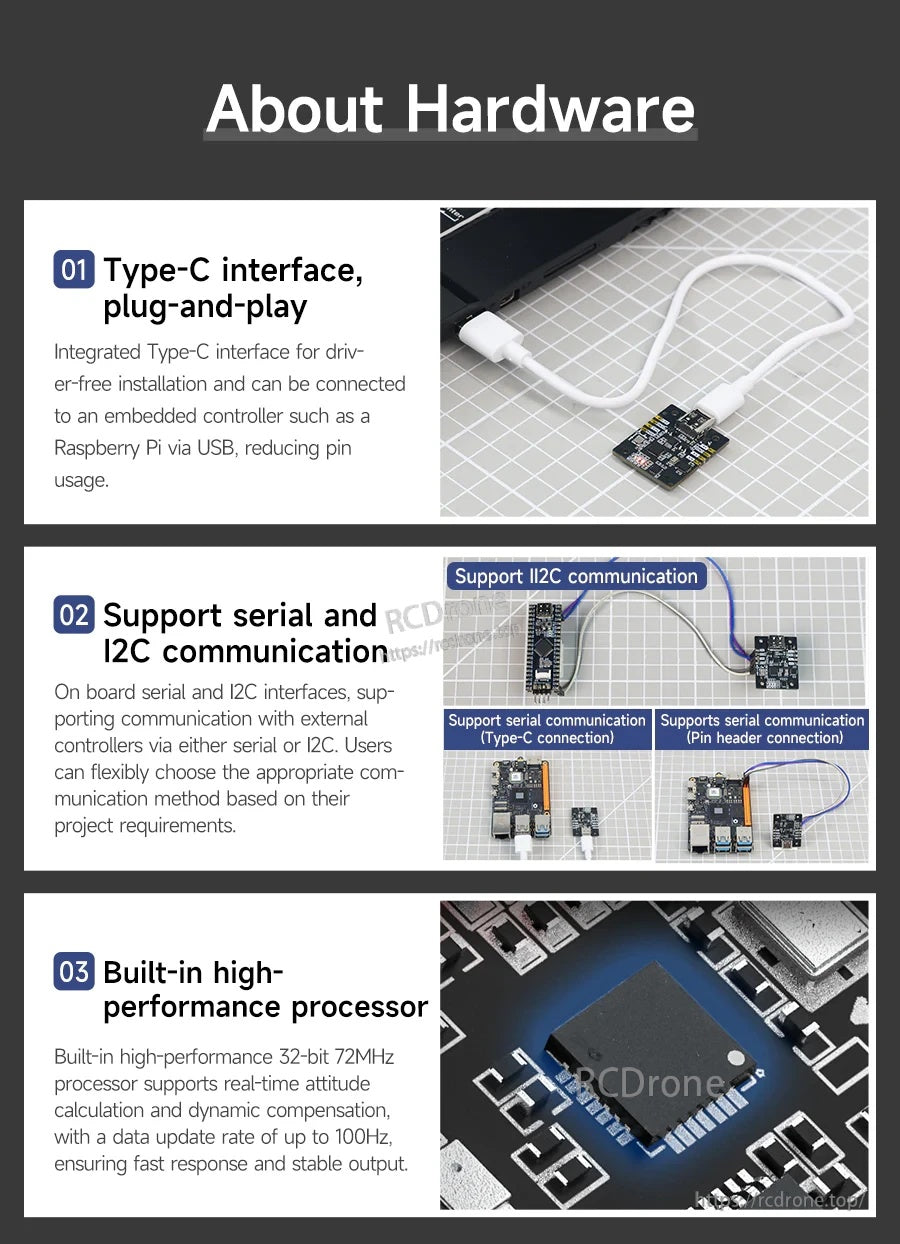
El módulo de sensor IMU Yahboom utiliza una interfaz USB-C y admite conexiones I2C o seriales para una integración flexible con controladores.

El módulo de sensor IMU Yahboom incluye conectores de pines en el paquete, pero no están soldados por defecto y necesitan ser soldados para su uso.
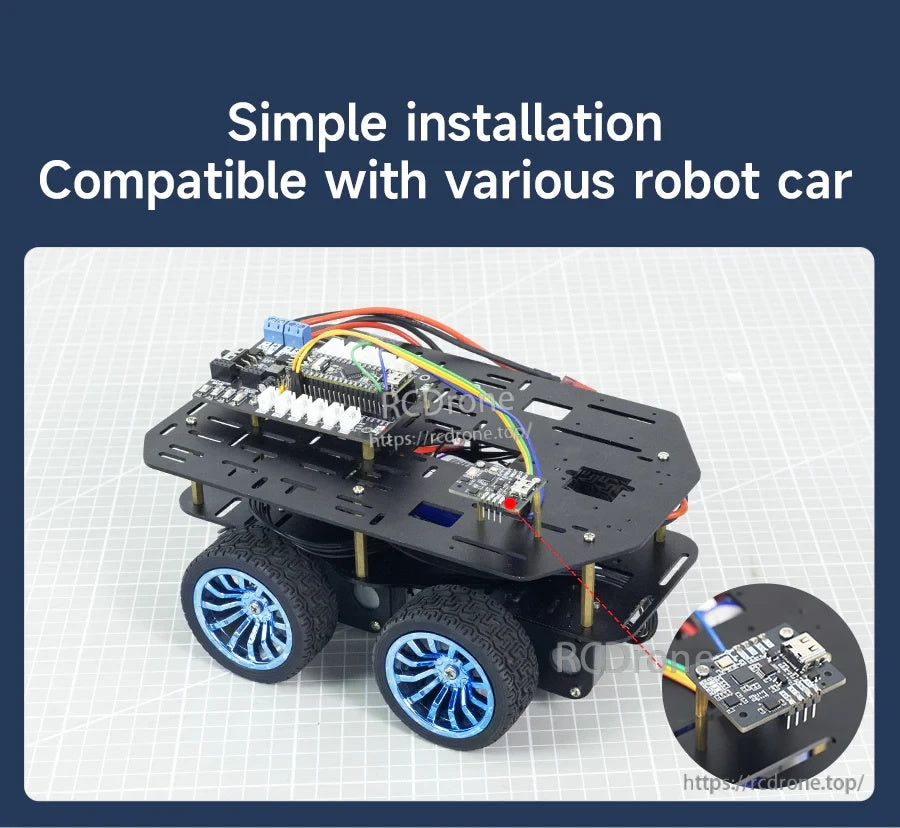
El módulo de sensor IMU Yahboom se monta de manera ordenada en plataformas comunes de coches robóticos, con un cableado simple a la placa de control principal.
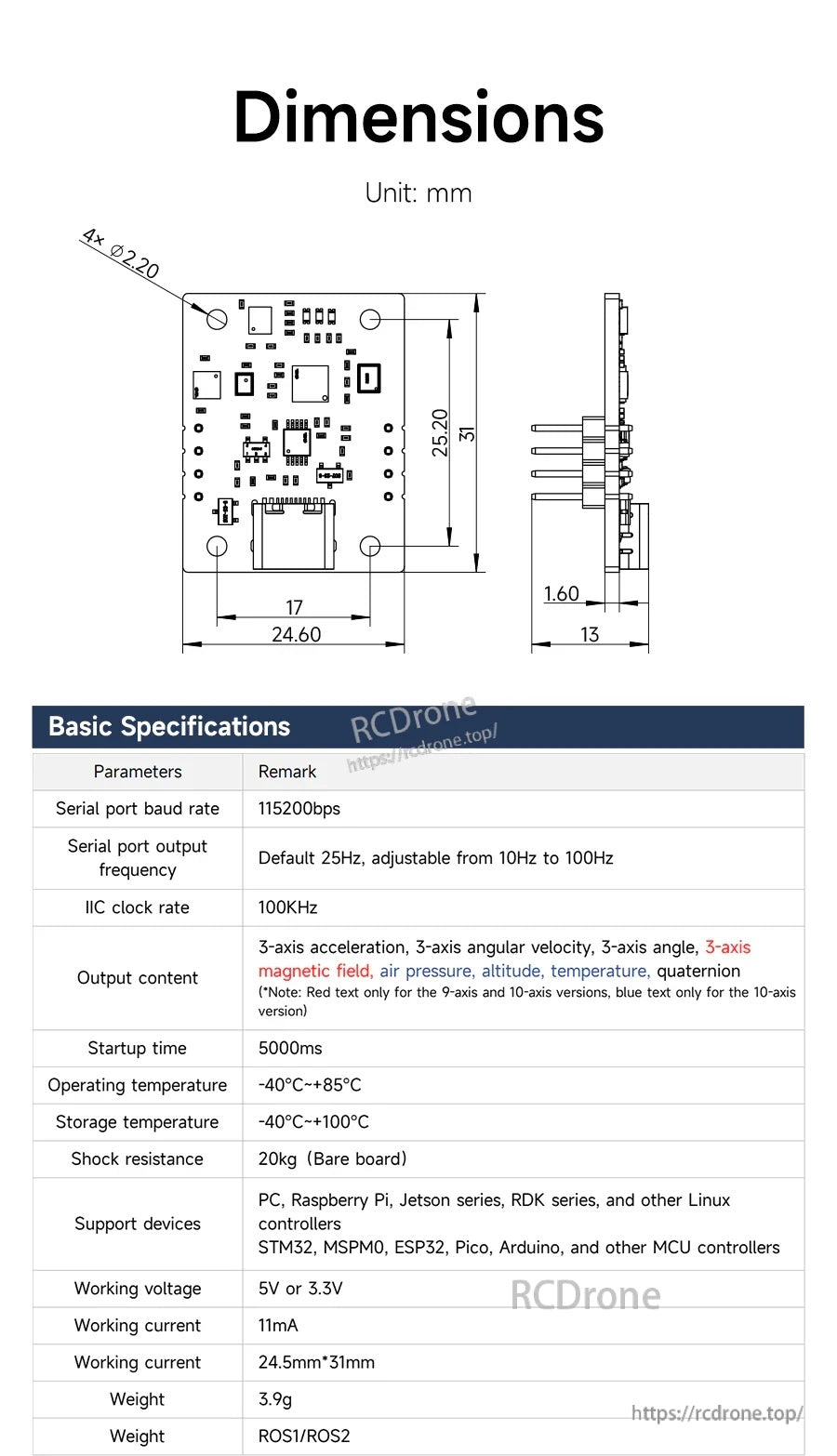
El sensor IMU Yahboom proporciona interfaces UART (115200bps) e I2C (400kHz), funciona a 3.3V e incluye un tamaño de placa compacto de 24.6 mm.
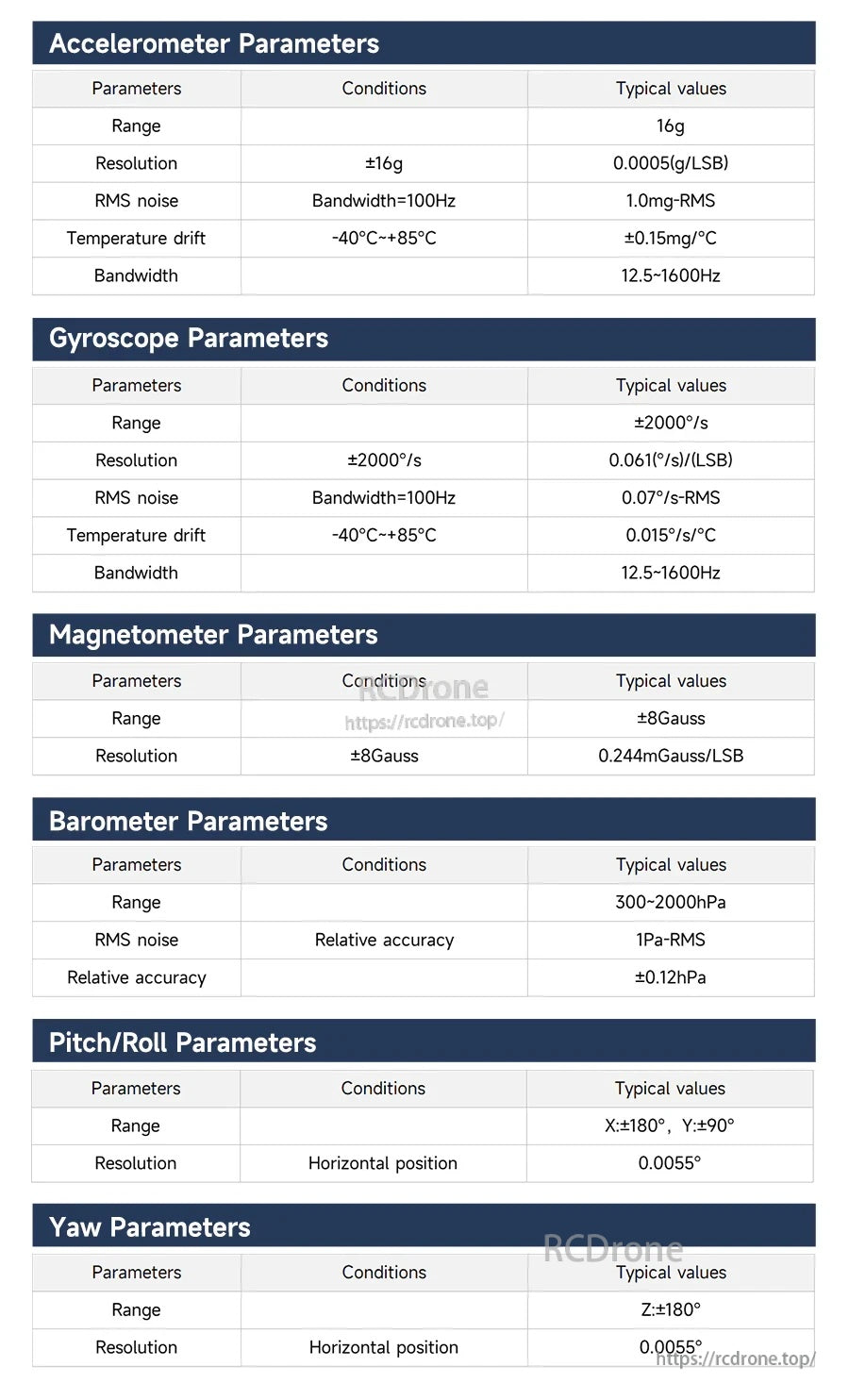
La lista de especificaciones del sensor IMU Yahboom incluye rangos típicos como aceleración de 16g, giroscopio de ±2000°/s, magnetómetro de ±8 Gauss y barómetro de 300–2000 hPa.
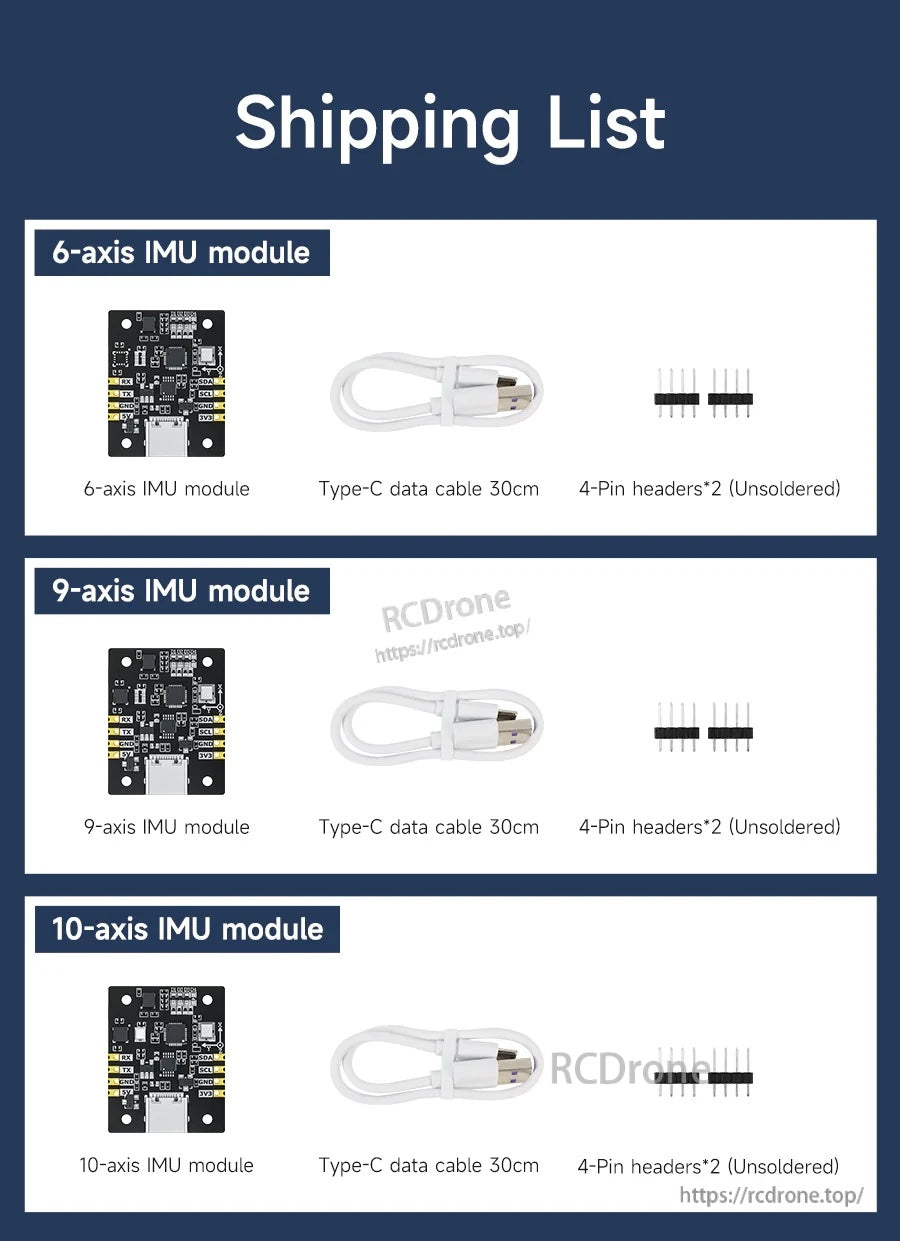
Cada kit de módulo IMU incluye la placa del sensor, un cable de datos USB-C de 30 cm y dos conectores de 4 pines sin soldar para el cableado.
El módulo de sensor IMU Yahboom utiliza una placa de expansión compacta con un conector micro USB y almohadillas de encabezado para facilitar el cableado en construcciones pequeñas.
Related Collections