





Sensor LiDAR 2D YDLIDAR 4ROS TOF 30m 360° IP65 100KLux ROS1/ROS2 UART para Raspberry Pi Jetson
Sensor LiDAR 2D YDLIDAR 4ROS TOF 30m 360° IP65 100KLux ROS1/ROS2 UART para Raspberry Pi Jetson
Yahboom
No se pudo cargar la disponibilidad de retiro
Resumen
YDLIDAR 4ROS es un sensor LiDAR TOF (tiempo de vuelo) diseñado para escaneo, medición y mapeo de 360° en entornos tanto interiores como exteriores. Cuenta con capacidad anti-reflejo de hasta 100KLux, una cubierta protectora cerrada IP65 (impermeable y a prueba de polvo), y un controlador de motor integrado con regulación de velocidad. Se proporciona soporte para ROS1/ROS2 con un paquete de código abierto, lo que lo hace adecuado para la navegación de robots y flujos de trabajo SLAM en plataformas como Raspberry Pi y Jetson.
Características Clave
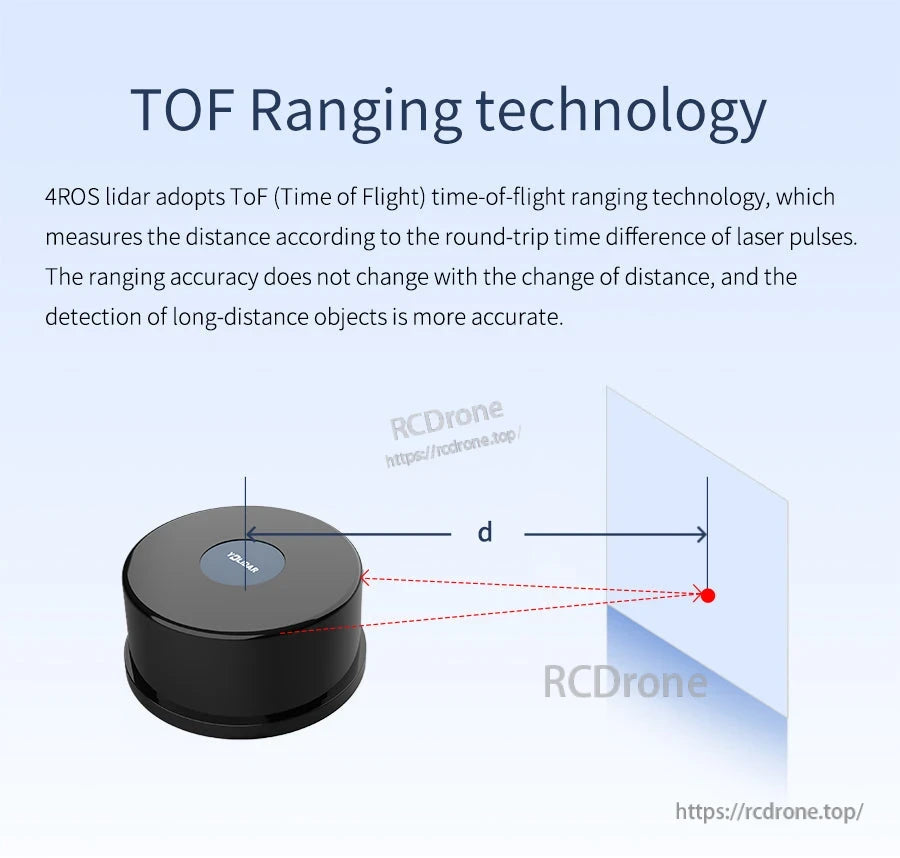
- Tecnología de medición TOF (distancia medida por la diferencia de tiempo de ida y vuelta del pulso láser)
- Escaneo láser omnidireccional de 360°
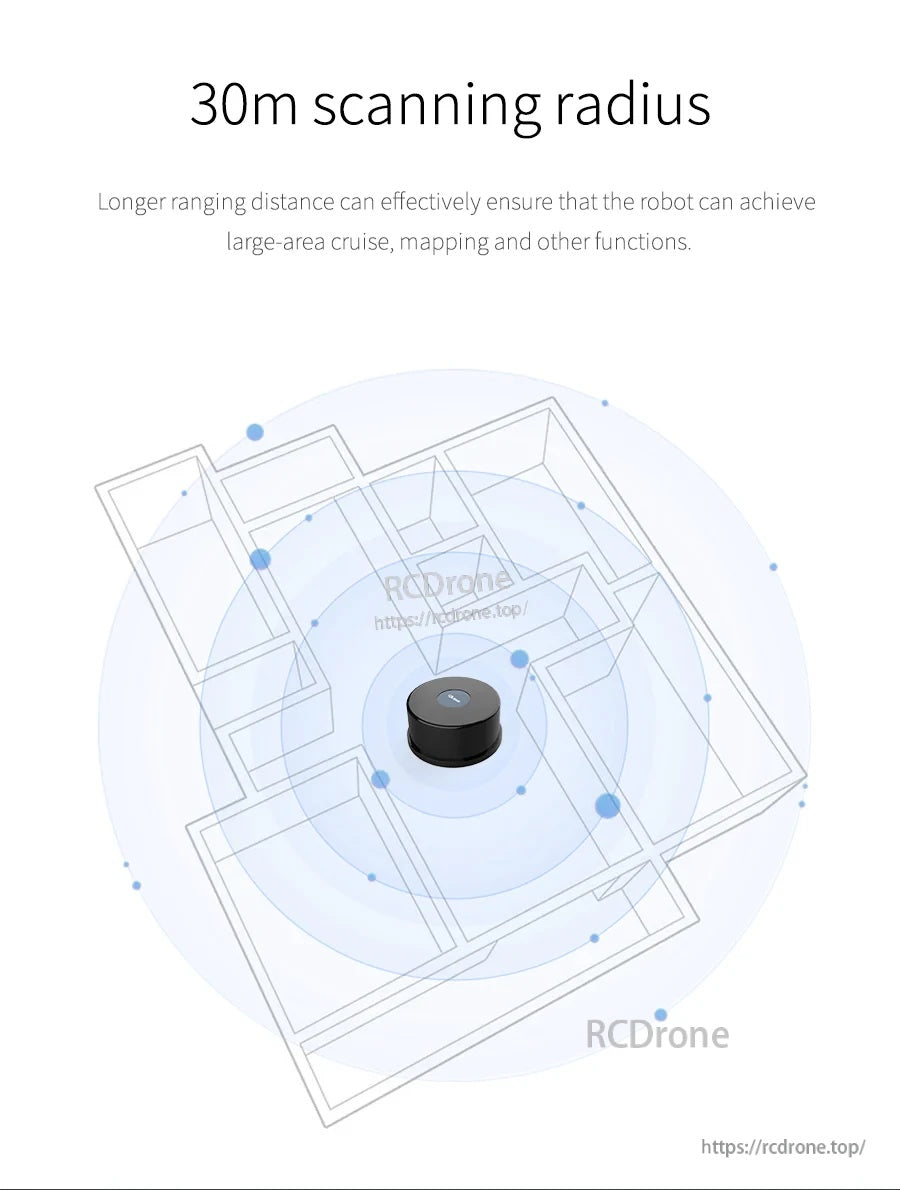
- Radio de medición de hasta 30 m (objeto con 80% de reflectividad)
- Intensidad de luz ambiental anti: 100KLux (unidad de intensidad de luz)
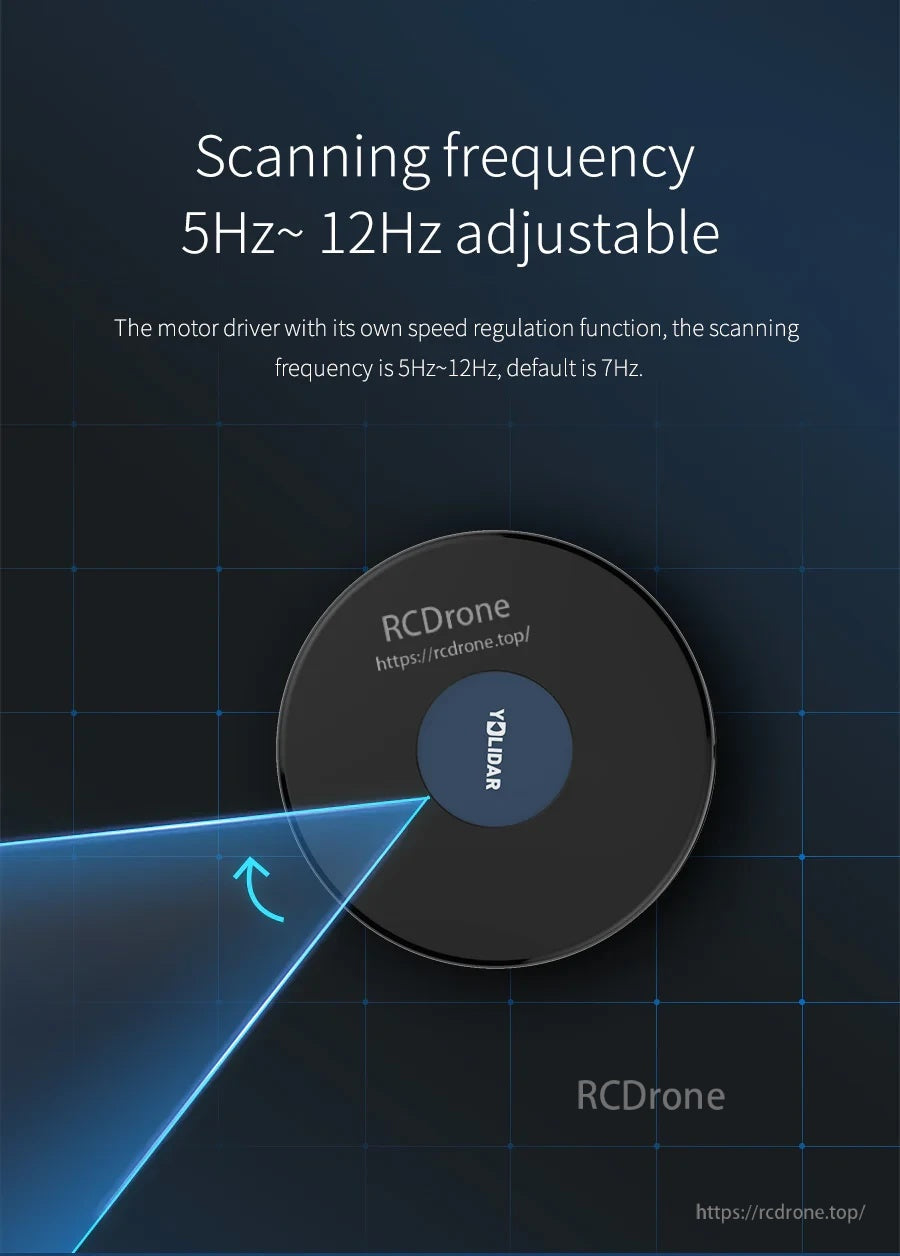
- Frecuencia de escaneo ajustable: 5~12 Hz (predeterminado 7 Hz)
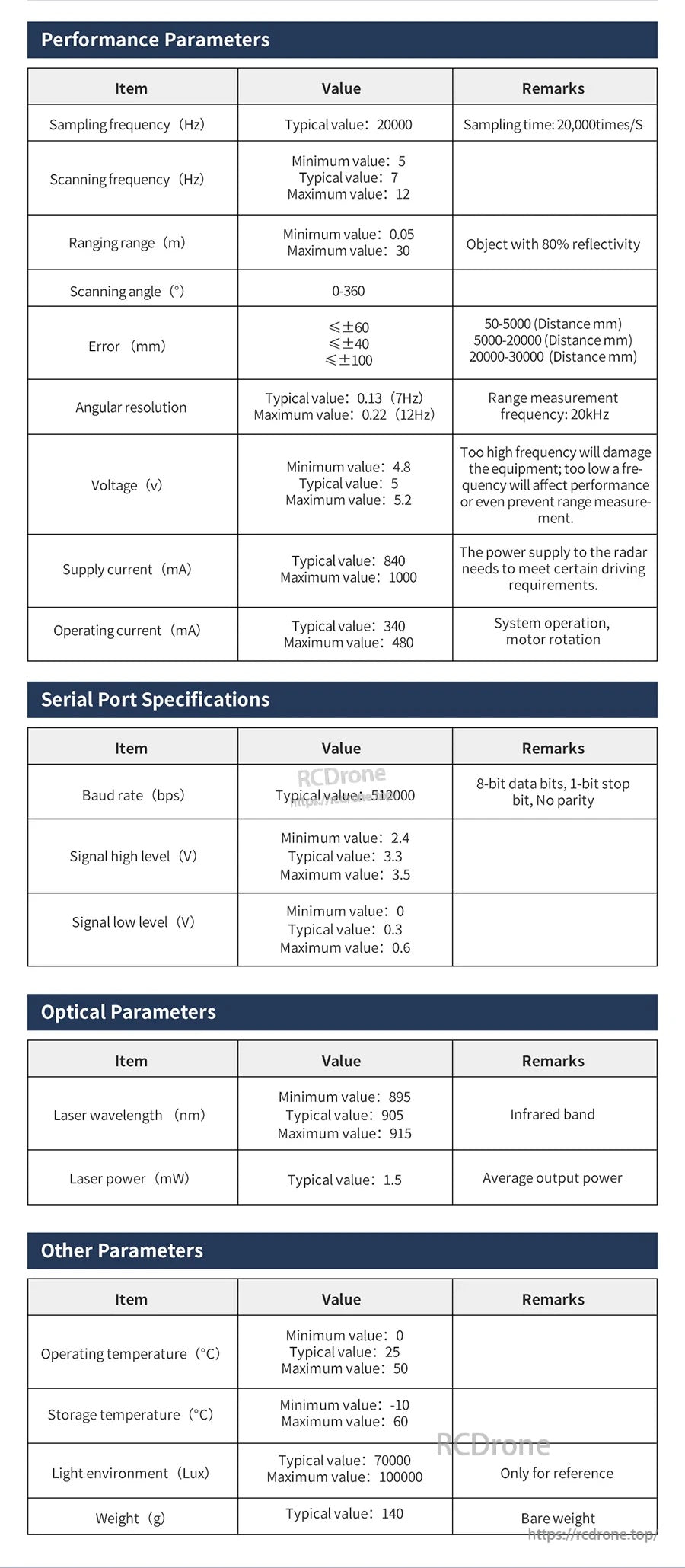
- Frecuencia de muestreo: 20,000 veces/s
- Enclosure IP65 (impermeable y a prueba de polvo)
- Soporte ROS: ROS1/ROS2; compatible con sistemas ROS1 y ROS2
- Soporte para Windows: software para PC en Windows
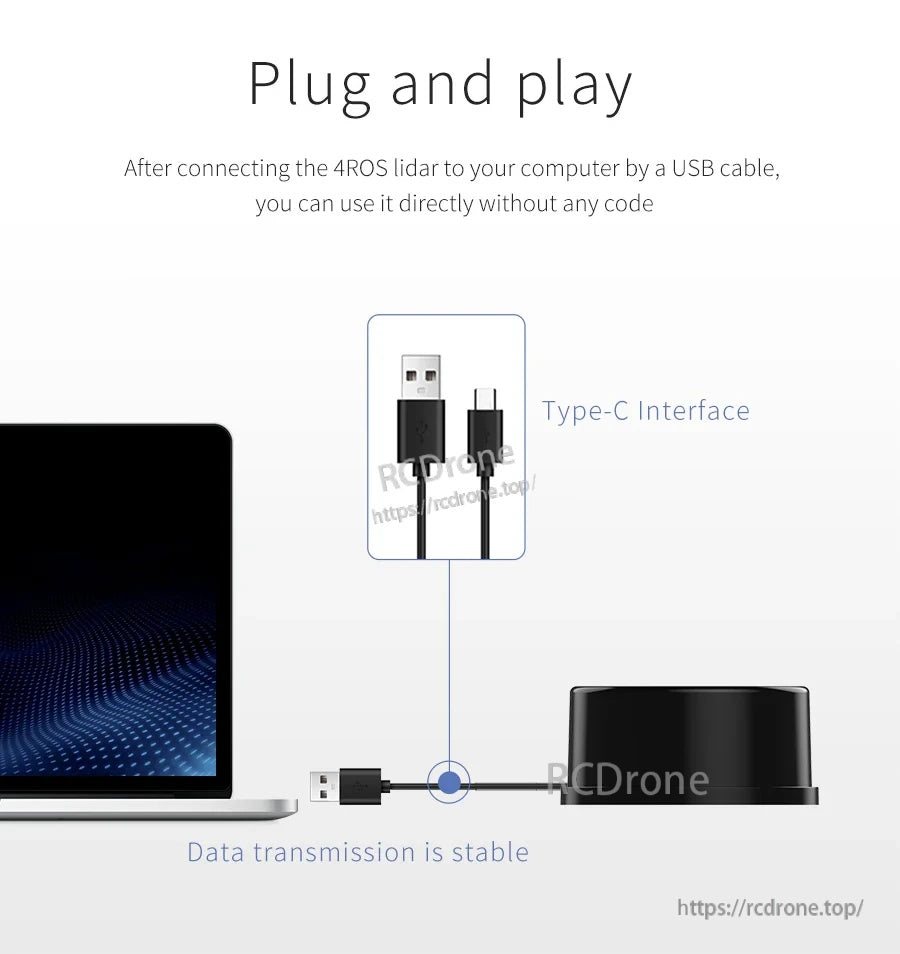
- Interfaz de comunicación: Puerto Serial Asincrónico Estándar (UART)
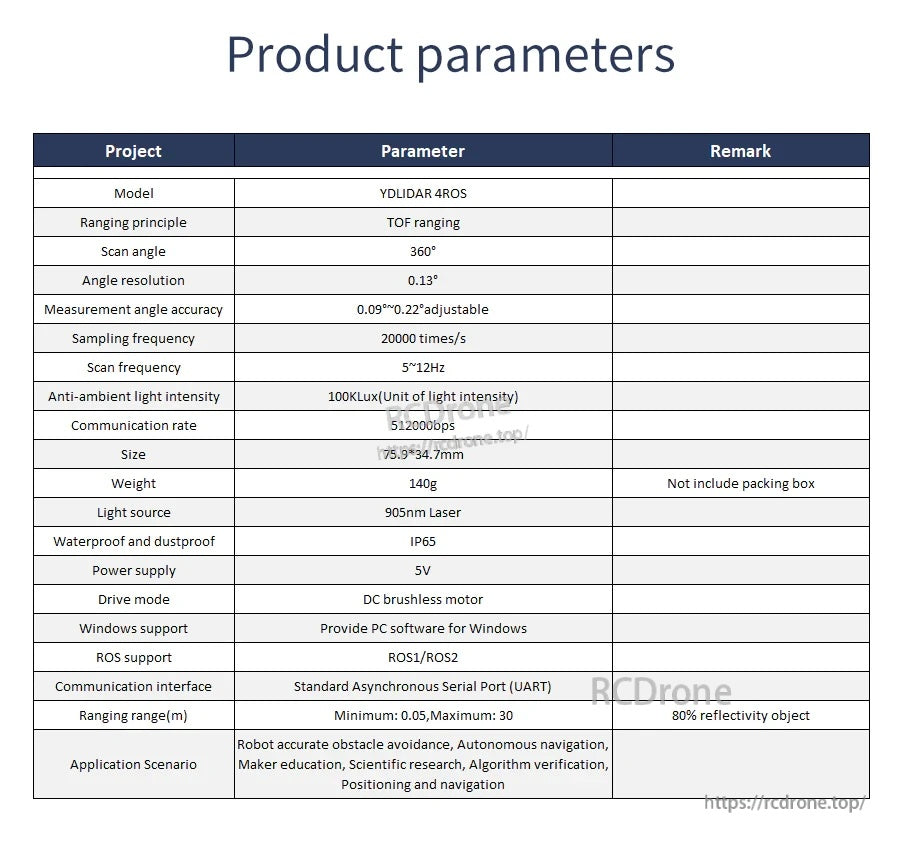
Especificaciones
| Modelo | YDLIDAR 4ROS |
| Principio de medición | Medición TOF |
| Ángulo de escaneo | 360° |
| Resolución de ángulo | 0.13° |
| Precisión del ángulo de medición | 0.09°~0.22° ajustable |
| Frecuencia de muestreo | 20000 veces/s |
| Frecuencia de escaneo | 5~12 Hz |
| Frecuencia de escaneo (anotada) | 12 Hz |
| Frecuencia de escaneo predeterminada (anotada) | 7 Hz |
| Intensidad de luz ambiental anti | 100KLux (Unidad de intensidad de luz) |
| Tasa de comunicación | 512000 bps |
| Interfaz de comunicación | Puerto serie asíncrono estándar (UART) |
| Tamaño | 75.9*34.7 mm |
| Altura (anotada) | 3.47 cm |
| Peso | 140 g (sin incluir la caja de embalaje) |
| Fuente de luz | Laser de 905 nm |
| Impermeable y a prueba de polvo | IP65 |
| Fuente de alimentación | 5 V |
| Modo de conducción | Motor sin escobillas de CC |
| Soporte para Windows | Proporcionar software para PC para Windows |
| Soporte para ROS | ROS1/ROS2 |
| Rango de medición (m) | Mínimo: 0.05, Máximo: 30 (80% de reflectividad del objeto) |
| Escenario de aplicación | Evitar obstáculos con precisión en robots, Navegación autónoma, Educación maker, Investigación científica, Verificación de algoritmos, Posicionamiento y navegación |
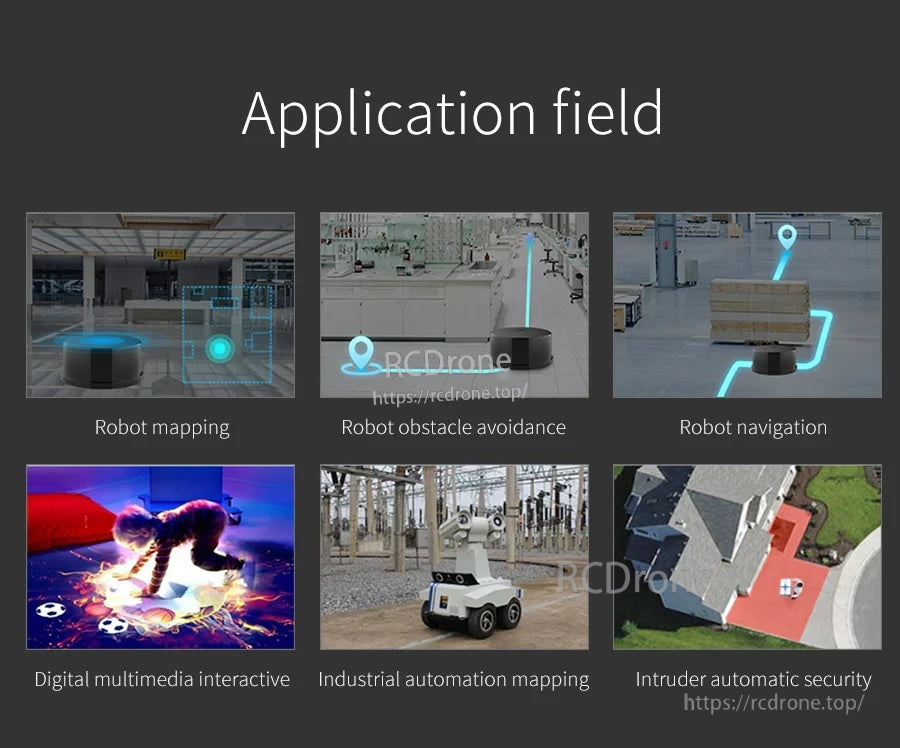
Aplicaciones
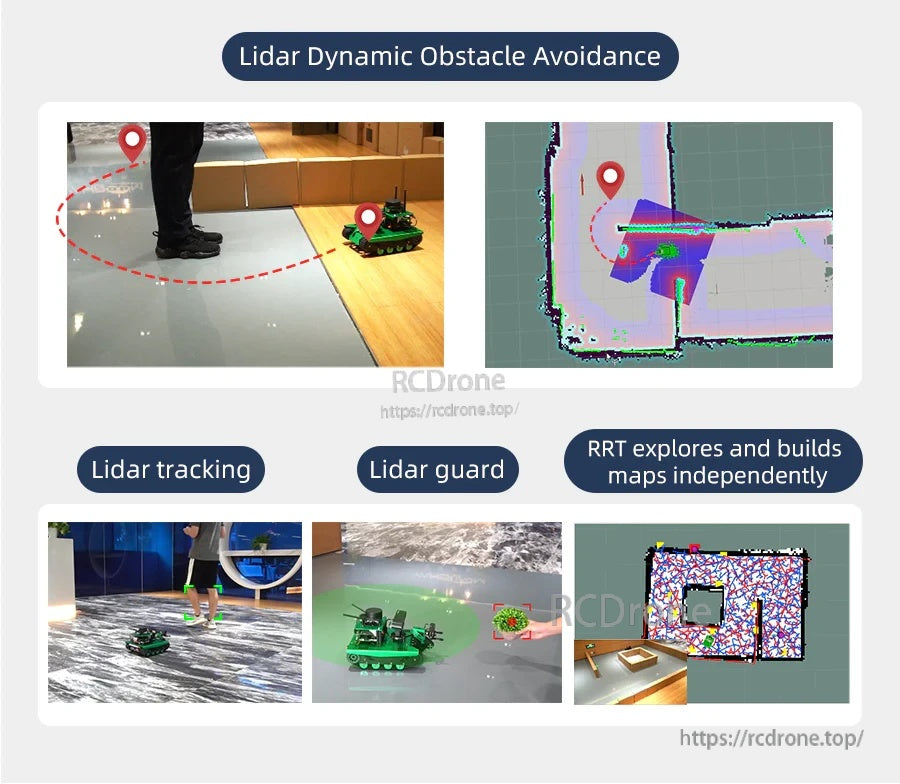
- Mapeo, posicionamiento y navegación de robots (flujos de trabajo ROS/SLAM)
- Evitar obstáculos y escaneo del contorno del entorno
- Educación maker y verificación de algoritmos
- Integración con placas Raspberry Pi / serie Jetson, computadora PC, computadora industrial y placa serie RDK
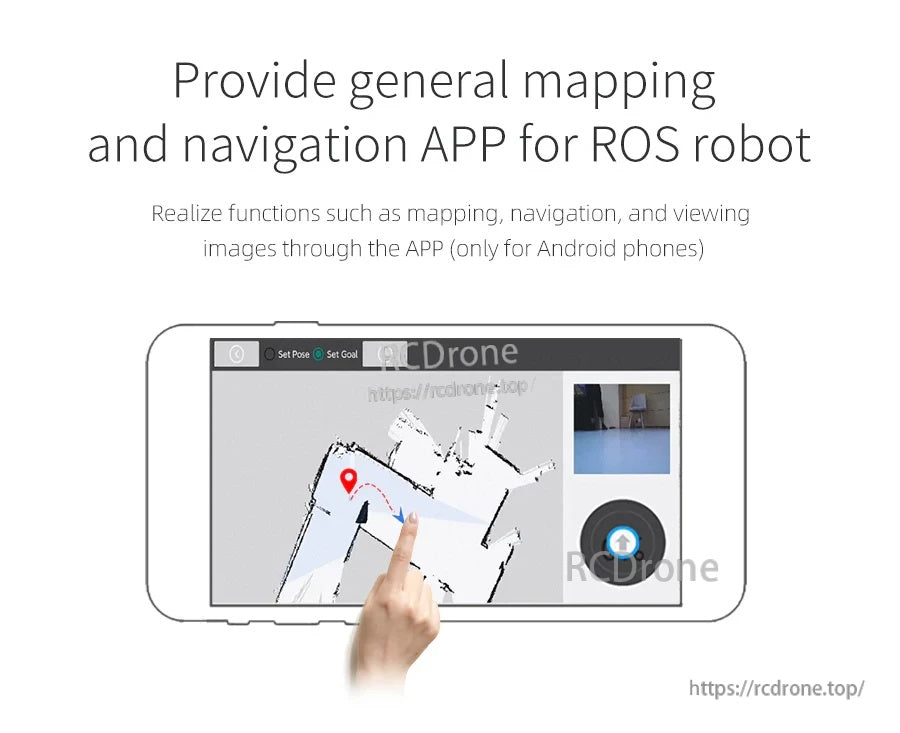
También se hace referencia a una aplicación general de mapeo y navegación para robots ROS (solo teléfonos Android).
Manuales & Recursos
Enlace del tutorial YDLIDAR 4ROS
Para preguntas sobre integración y compatibilidad, contacta &https://rcdrone.top/ o envía un correo electrónico a [email protected].
Detalles




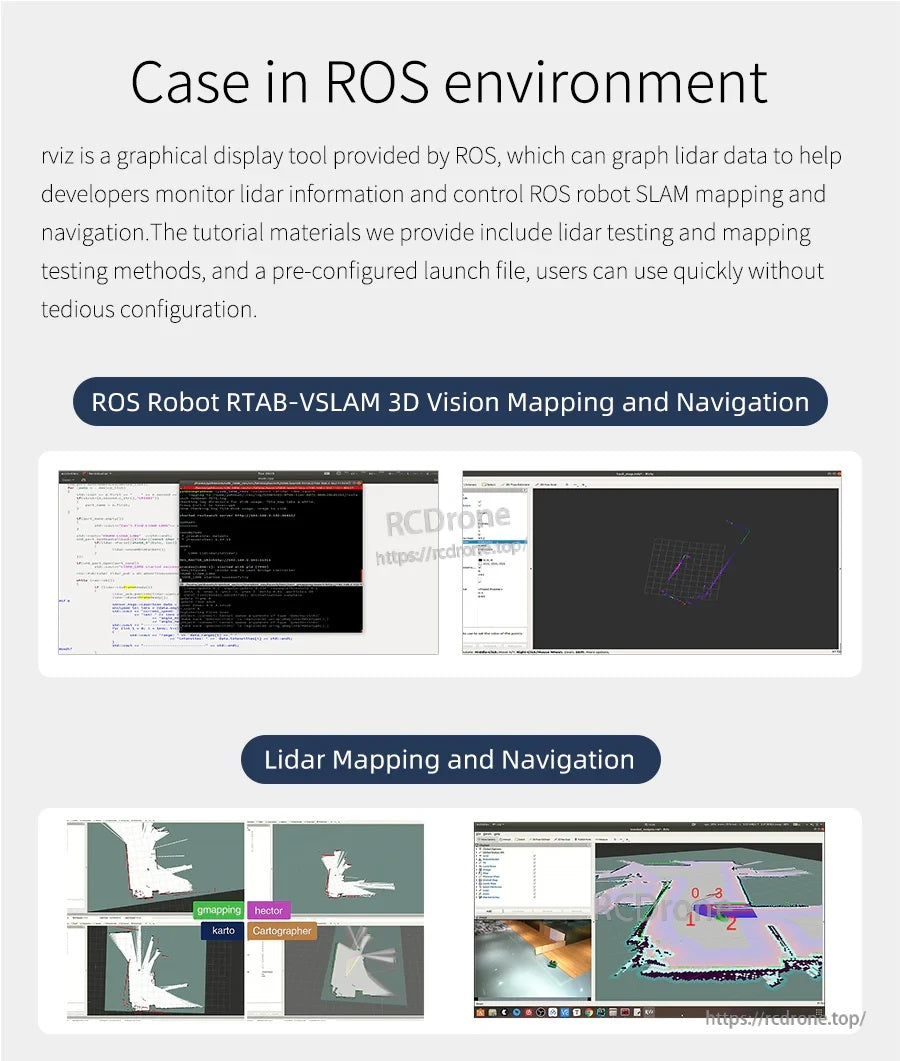
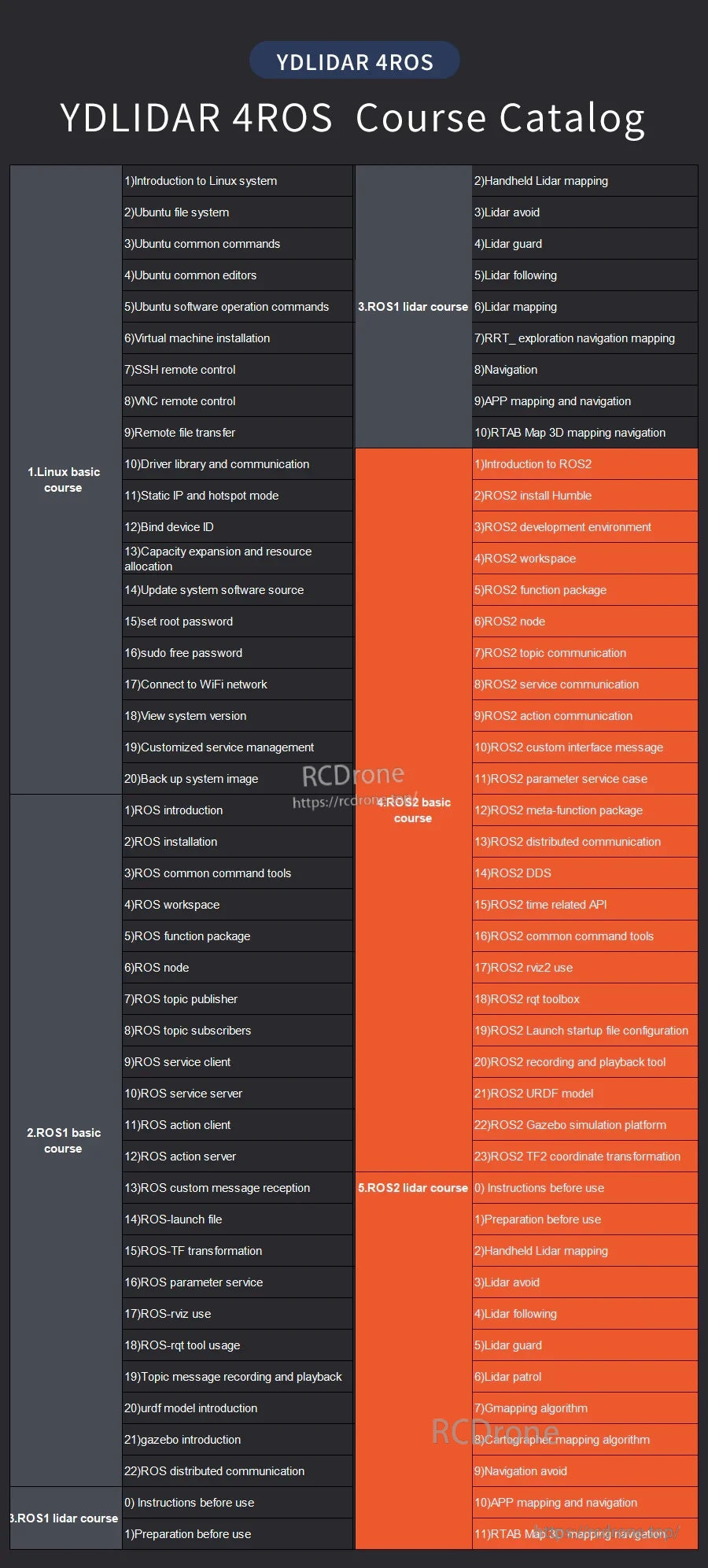
El catálogo de cursos YDLIDAR 4ROS describe módulos de aprendizaje que cubren los conceptos básicos de ROS2 a través de mapeo, navegación, SLAM e integración de controladores.
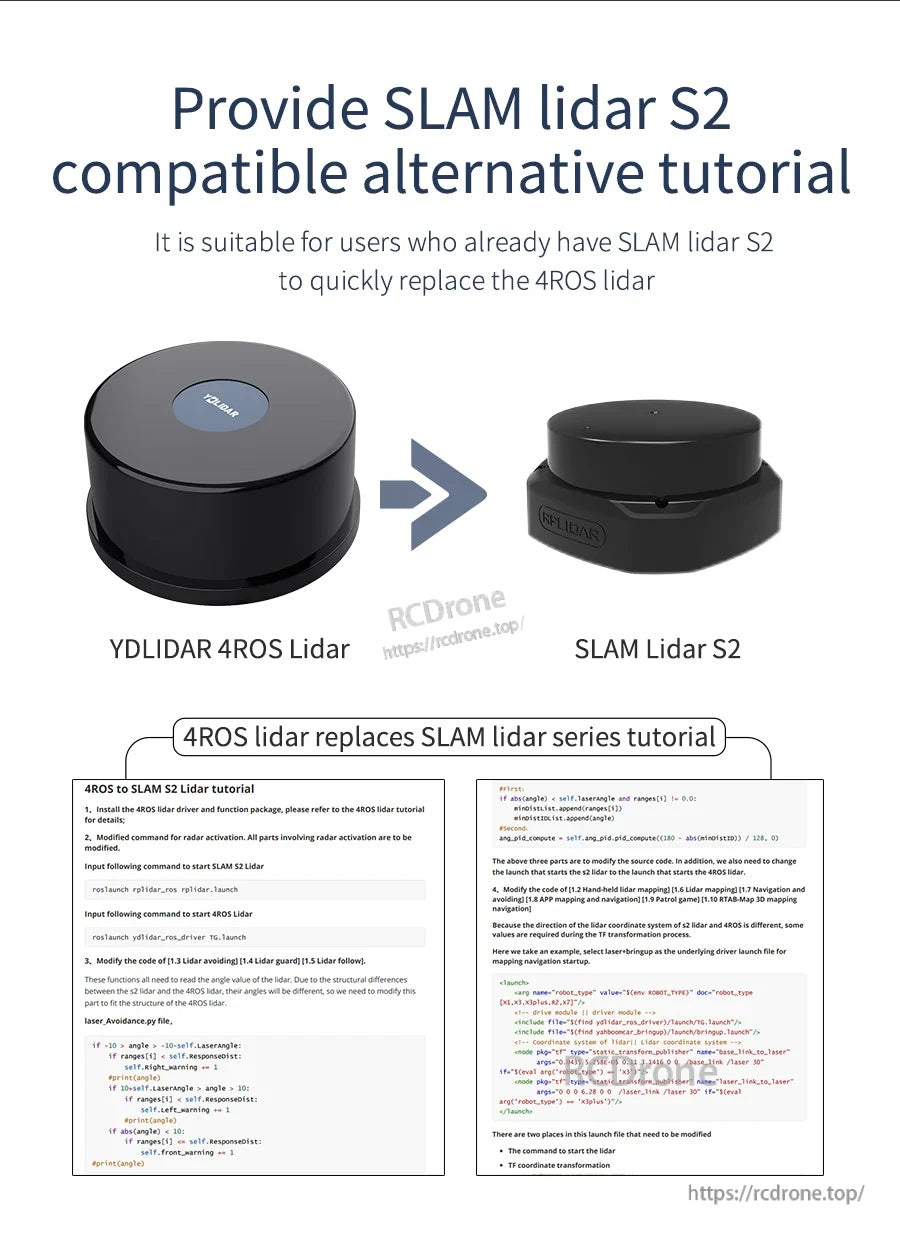
YDLIDAR 4ROS ToF 2D LiDAR se presenta como una alternativa compatible con SLAM LiDAR S2 con un tutorial de reemplazo rápido.
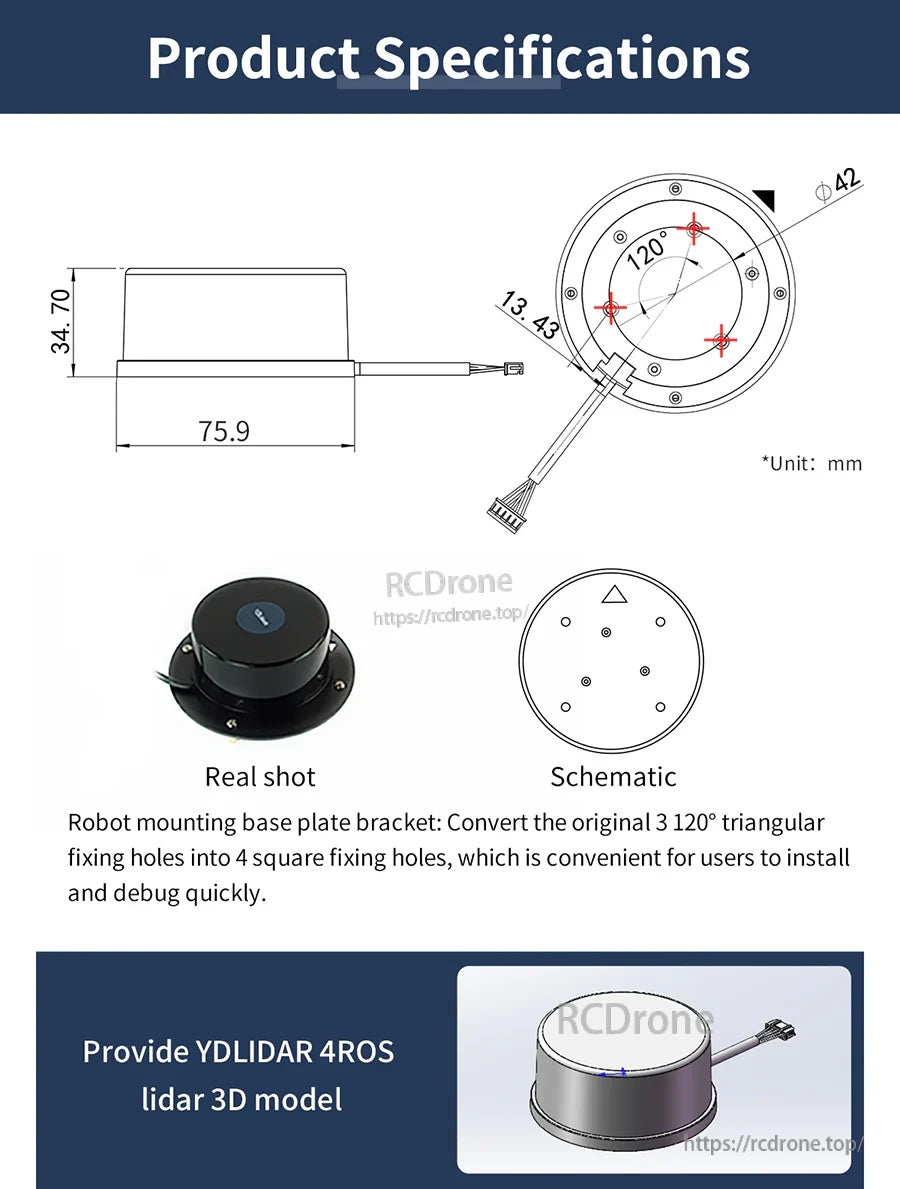
El YDLIDAR 4ROS incluye un cuerpo de sensor cilíndrico compacto con un cable de conexión, además de referencias de dimensiones y orificios de montaje para ayudar en la planificación de la integración.
Las especificaciones de rendimiento del YDLIDAR 4ROS incluyen un ángulo de escaneo de 0–360°, un rango de distancia de 0.25–30 m y una frecuencia de escaneo de 7.5–15 Hz.

El kit de LiDAR YDLIDAR 4ROS incluye un adaptador de puerto serie, un cable de datos USB Tipo‑C de 1 m y un soporte de base de montaje para la configuración.
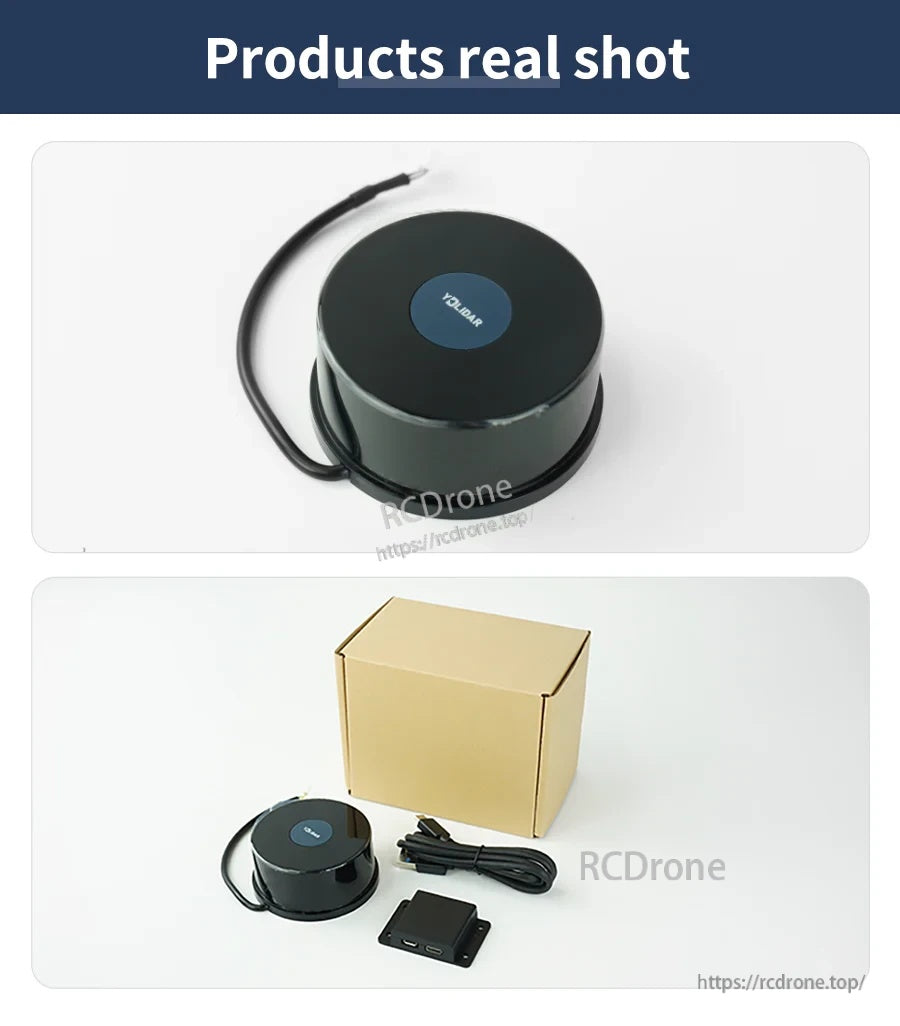
El sensor LiDAR 2D TOF YDLIDAR 4ROS viene con un cable adjunto y se empaqueta con una caja y un cable USB para la configuración.
Related Collections





