




ZeroOne X6 Controlador de Vuelo AutoPilot FMU v6X, STM32H753, ArduPilot, PX4 para Dron VTOL
ZeroOne X6 Controlador de Vuelo AutoPilot FMU v6X, STM32H753, ArduPilot, PX4 para Dron VTOL
ZeroOne
Precio habitual
$519.00 USD
Precio habitual
Precio de oferta
$519.00 USD
Precio unitario
por
Impuestos incluidos.
Los gastos de envío se calculan en la pantalla de pago.
No se pudo cargar la disponibilidad de retiro
Resumen
El ZeroOne X6 AutoPilot es un controlador de vuelo para construcciones de drones multirrotor y VTOL, diseñado en torno al estándar de hardware de código abierto FMU v6X. Integra absorción de impactos incorporada, sensores de bajo ruido con diseño de compensación de temperatura y una interfaz Ethernet de 100 Mbps para una conectividad ampliada.
Características Clave
- Arquitectura de código abierto FMU v6X con referencia a la documentación estándar del conector Pixhawk DS-009.
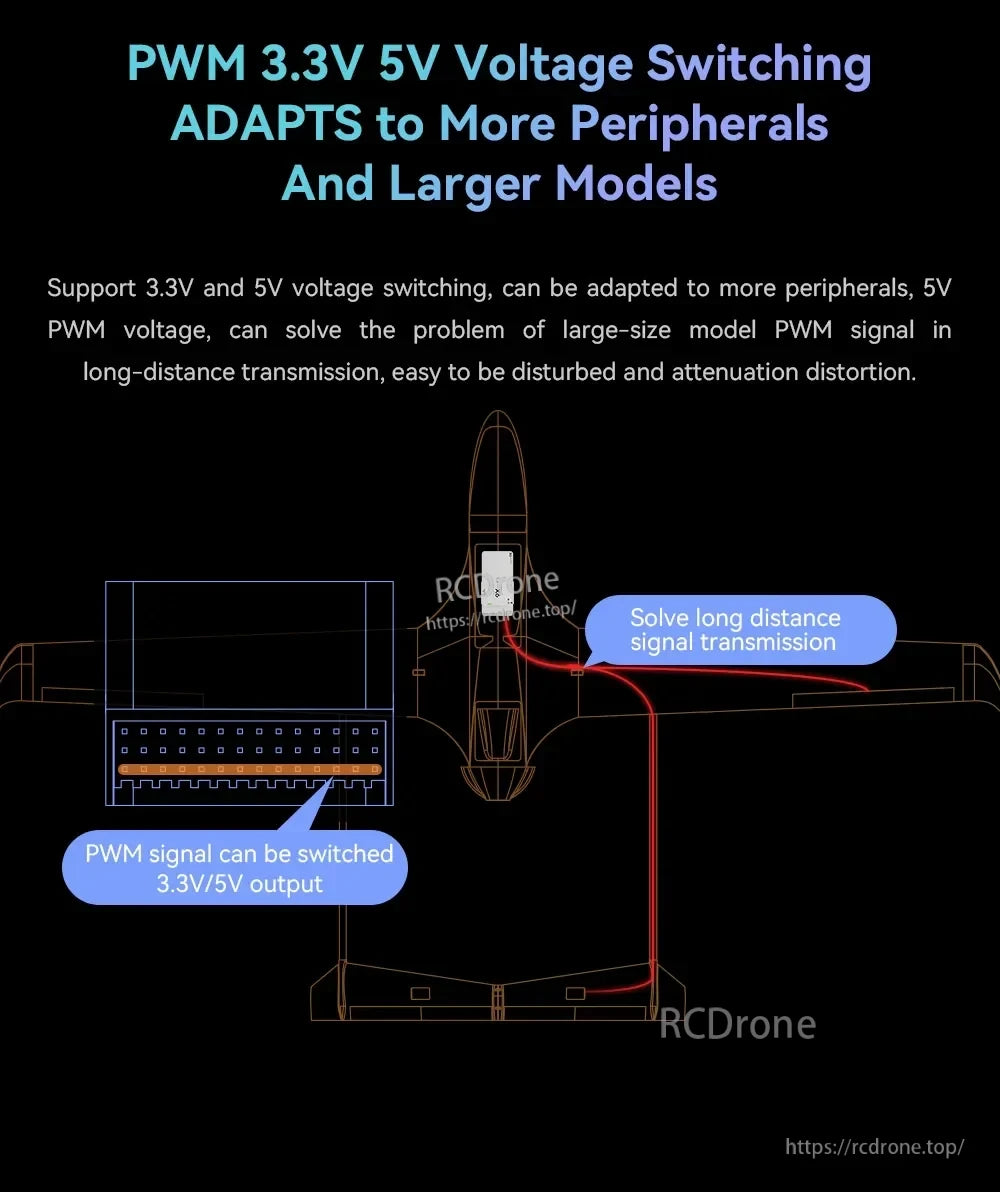
- Conmutación de voltaje PWM 3.3V/5V para adaptarse a diferentes periféricos y ayudar con la transmisión de señales PWM a larga distancia.
- Diseño de protección integral: protección contra sobrecorriente/sobrevoltaje, protección de limitación de corriente del receptor, protección ESD para puertos y filtro EMI de alimentación.
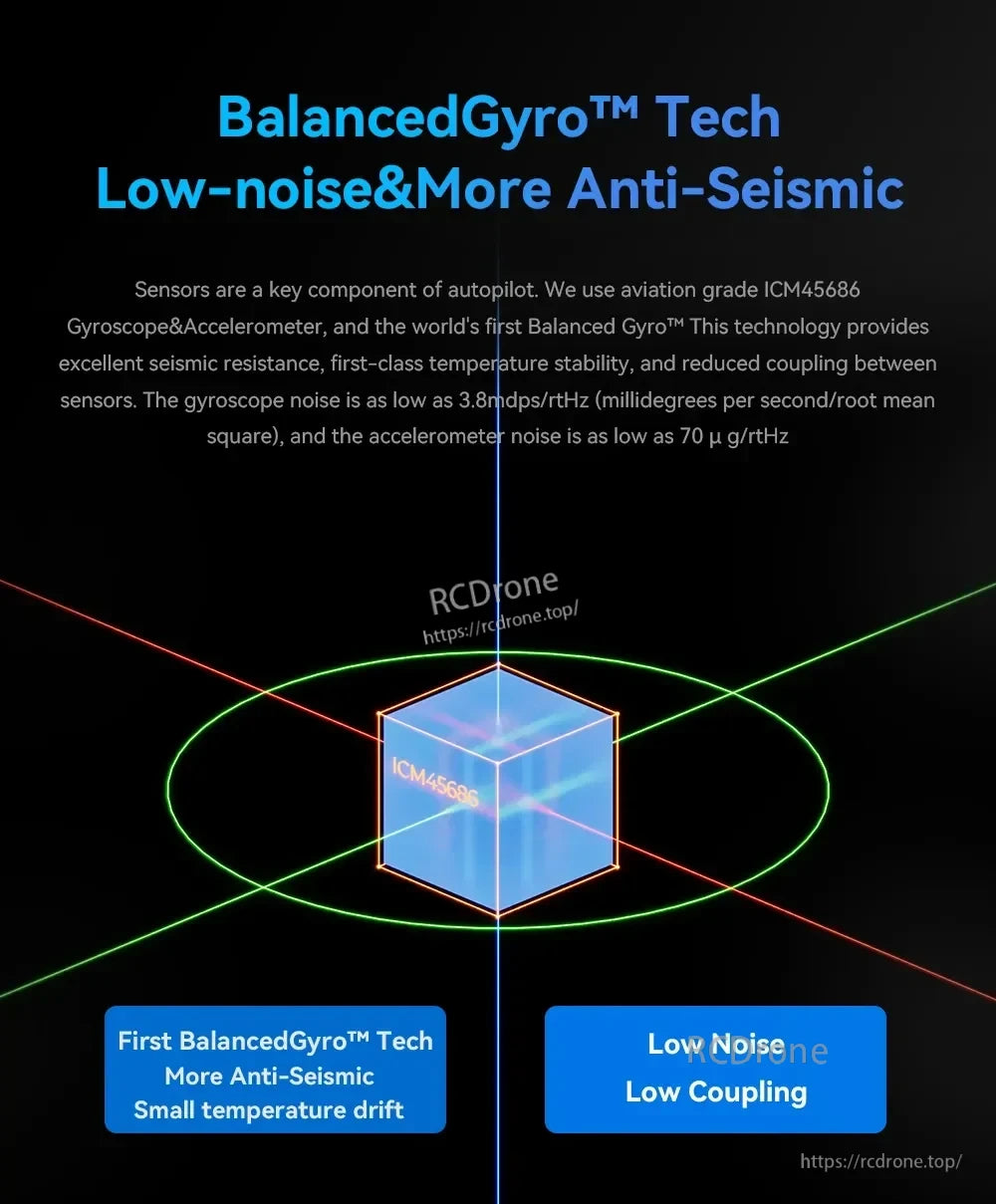
- Tecnología BalancedGyro3 (ICM45686) con bajo ruido declarado y reducción del acoplamiento entre sensores.
- Soporte de firmware: ArduPilot (PX4 próximamente).
Para soporte de pedidos y preguntas de compatibilidad, comuníquese con el servicio al cliente en [email protected] or visite https://rcdrone.top/.
Especificaciones
| Artículo | Especificación |
|---|---|
| Estándar de hardware | FMU v6X |
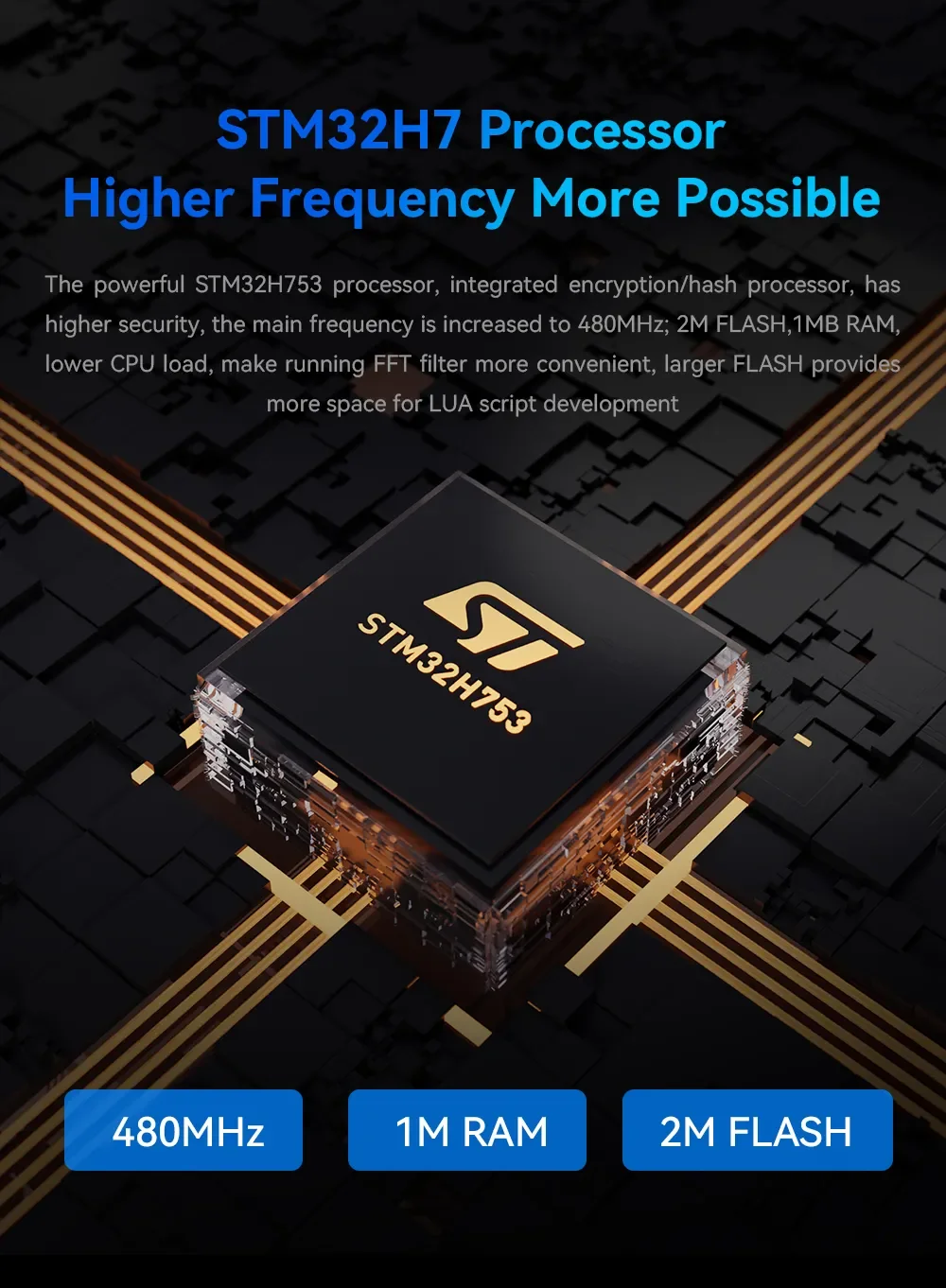
| MCU | STM32H753 |
| IO MCU | STM32F103 |
| Amortiguación incorporada | SÍ |
| Acelerómetros &y giros | ICM45686 + ICM45686 + BMI088 |
| Ruido de giroscopio declarado BalancedGyro3 | 3.8 mdps/rtHz |
| Ruido del acelerómetro BalancedGyro3 | 70 ug/rtHz |
| Barómetro | ICP-20100 x2 |
| Brújula | RM3100 |
| Relé PWM | SÍ |
| Entrada de protocolo RC | SBUS + DSM + PPM |
| Cantidad de PWM | 16 (14 puertos DuPont + 2 puertos de expansión GH1.25) |
| Conmutación de voltaje PWM | Se admite la conmutación entre 3.3V y 5V |
| Interfaz de alimentación | 2 puertos de alimentación DroneCAN |
| Monitoreo de voltaje del servo | 9.9 V |
| Detalles de la interfaz | CAN x2; GPS&y Seguridad x1; GPS2 x1; DSM PPM IN x1; ETH x1; UART 4 x1; SBUS IN x1; USB x1; SPI x1; AD&y IO x1; I2C x1 |
| Temperatura de operación | -20 °C ~ 85 °C |
| Peso | 93 g |
| Tensión de operación | 4.5 V a 5.4 V |
| Soporte de firmware | ArduPilot (PX4 próximamente) |
| Valores del dibujo mecánico (unidad no especificada) | 38.8; 17.2; 13 |
Aplicaciones
- Construcción y mantenimiento de drones multirrotor
- Construcción de drones VTOL que requieren un controlador de vuelo FMU v6X
- Reemplazo de un módulo de controlador de vuelo ZeroOne X6
Detalles




Related Collections




