






ZeroOne X6 Pro Controlador de Vuelo Autopiloto FMU v6X STM32H753, Triple IMU, Ethernet 100M, PWM 3.3V/5V
ZeroOne X6 Pro Controlador de Vuelo Autopiloto FMU v6X STM32H753, Triple IMU, Ethernet 100M, PWM 3.3V/5V
ZeroOne
No se pudo cargar la disponibilidad de retiro
Resumen
El ZeroOne X6 Pro es un controlador de vuelo de piloto automático basado en la arquitectura de código abierto FMU v6X (Estándar de Conector Pixhawk DS-009), diseñado para entornos de alta vibración y que soporta el firmware ArduPilot y PX4. Integra sensores de grado industrial, absorción de impactos incorporada, redundancia triple de IMU, compensación de temperatura de IMU y una interfaz Ethernet de 100 Mbit para una conectividad ampliada.
Características Clave
- Estándar de hardware de código abierto FMU v6X (compatibilidad con el estándar de conector Pixhawk DS-009 mostrado)
- Procesador: STM32H753; procesador de cifrado/hash integrado (como se indica); frecuencia principal aumentada a 480MHz; 2M FLASH; 1M RAM
- Sensores de grado industrial con alta resistencia a vibraciones, bajo ruido y bajo desplazamiento de temperatura (como se indica)
- Redundancia triple de IMU y arquitectura de redundancia de múltiples sensores (como se indica)
- Compensación de temperatura de IMU (potencia de calefacción aumentada en 100%, como se indica)
- Capacidad de conducción PWM con 3.3V/5V Soporte de conmutación de nivel/tensión PWM
- Características de protección: protección contra sobrecorriente/sobrevoltaje; protección de limitación de corriente del receptor; protección ESD para puertos; filtro EMI de alimentación
- Interfaz Ethernet de 100 Mbit (ETH x1) para conectar computadoras/periféricos externos (las plataformas de ejemplo incluyen Raspberry Pi y kit de desarrollo de la serie Nvidia Jetson)
- Soporte DroneCAN a través de interfaces de alimentación (se enumeran 2 interfaces de alimentación DroneCAN)
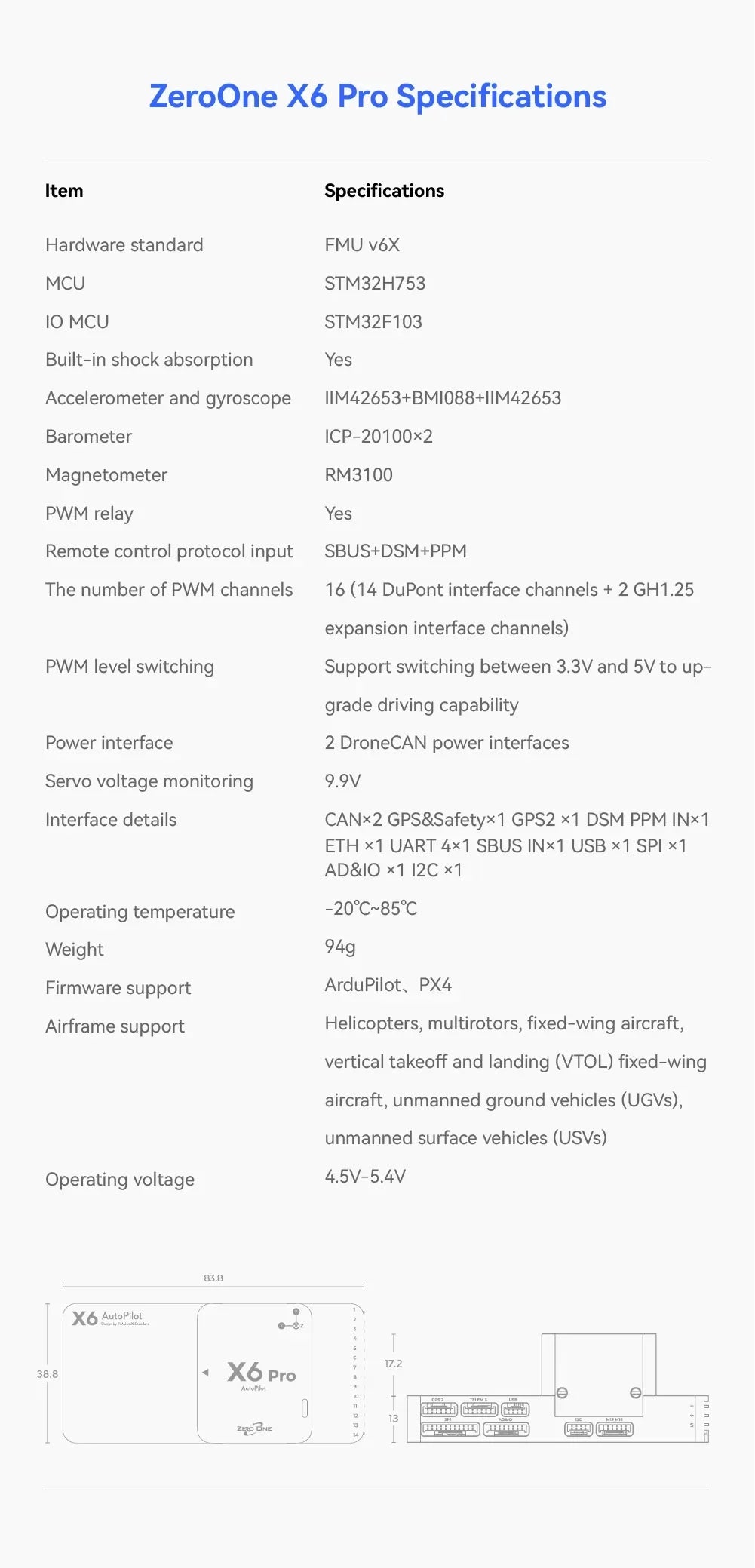
Especificaciones
| Estándar de hardware | FMU v6X |
| MCU | STM32H753 |
| IO MCU | STM32F103 |
| Frecuencia de CPU (como se indica) | 480MHz |
| Memoria (como se indica) | 1M RAM |
| Flash (como se indica) | 2M FLASH | Amortiguación incorporada | Sí |
| Acelerómetro y giroscopio (hoja de especificaciones) | IIM42653 + BMI088 + IIM42653 |
| Giroscopio mencionado en los materiales | ICM45686 (mencionado en el texto de características); IIM42653 (referenciado en la nota de código de ArduPilot y hoja de especificaciones) |
| Barómetro | ICP-20100 x2 |
| Magnetómetro | RM3100 |
| Relé PWM | Sí |
| Entrada de protocolo de control remoto | SBUS + DSM + PPM |
| Número de canales PWM | 16 (14 canales de interfaz DuPont + 2 GH1.25 canales de interfaz de expansión) |
| Conmutación de nivel PWM | Soporte para conmutar entre 3.3V y 5V para mejorar la capacidad de conducción |
| Interfaz de alimentación | 2 interfaces de alimentación DroneCAN |
| Monitoreo de voltaje del servo | 9.9V |
| Detalles de la interfaz | CAN x2; GPS&Seguridad x1; GPS2 x1; DSM PPM IN x1; ETH x1; UART 4 x1; SBUS IN x1; USB x1; SPI x1; AD&IO x1; I2C x1 |
| Temperatura de funcionamiento | -20°C~85°C |
| Voltaje de funcionamiento | 4.5V~5.4V |
| Peso | 94g |
| Soporte de firmware | ArduPilot, PX4 |
| Soporte de estructura aérea | Helicópteros; multirrotores; aeronaves de ala fija; aeronaves de ala fija de despegue y aterrizaje vertical (VTOL); vehículos terrestres no tripulados (UGVs); vehículos de superficie no tripulados (USVs) |
| Dimensiones externas (como se muestra) | 83.8 mm; 38.8 mm; 17.2 mm; 13 mm |
Sensores de grado industrial (valores de la tabla mostrados)
| Giroscopio | ||
| Rango (°/s) (más alto es mejor) | Sensor X6 Pro: 4000 | ADIS16470: 2000; ICM20649: 4000; ICM20689: 2000 |
| Ruido RMS (°/s/sqrt(Hz)) (más bajo es mejor) | Sensor X6 Pro: 0.005 | ADIS16470: 0.008; ICM20649: 0.0175; ICM20689: 0.006 |
| Cross sensibilidad (%) (más alto es mejor) | Sensor X6 Pro: 1.25 | ADIS16470: 0.1; ICM20649: 2; ICM20689: 2 |
| Deriva de temperatura de sensibilidad (°/s/°C) (más bajo es mejor) | Sensor X6 Pro: 0.005 | ADIS16470: 0.25; ICM20649: 2; ICM20689: 1.5 |
| Acelerómetro | ||
| Rango (g) (más alto es mejor) | Sensor X6 Pro: 32 | ADIS16470: 40; ICM20649: 30; ICM20689: 16 |
| Ruido RMS (mg) (más bajo es mejor) | Sensor X6 Pro: 0.7 | ADIS16470: 2.3; ICM20649: 2.85; ICM20689: 1.5 |
| Cross sensibilidad (%) (más bajo es mejor) | Sensor X6 Pro: 1 | ADIS16470: 0.1; ICM20649: 2; ICM20689: 2 |
| Deriva de temperatura de sensibilidad (%/°C) (más bajo es mejor) | Sensor X6 Pro: 0.005 | ADIS16470: 0.002; ICM20649: 0.026; ICM20689: 1 |
Aplicaciones
- Helicópteros
- Multi-cóptero
- Aeronaves de ala fija
- Aeronaves de ala fija VTOL
- UGV
- USV
Manuales
Servicio al cliente: [email protected] (o visita https://rcdrone.top/).
Detalles
El controlador de vuelo ZeroOne X6 Pro cuenta con sensores de grado industrial, alta precisión, bajo ruido y una fuerte capacidad de conducción PWM. Diseñado para aeronaves de gran carga, utiliza una arquitectura FMU v6X de código abierto con compatibilidad Pixhawk.
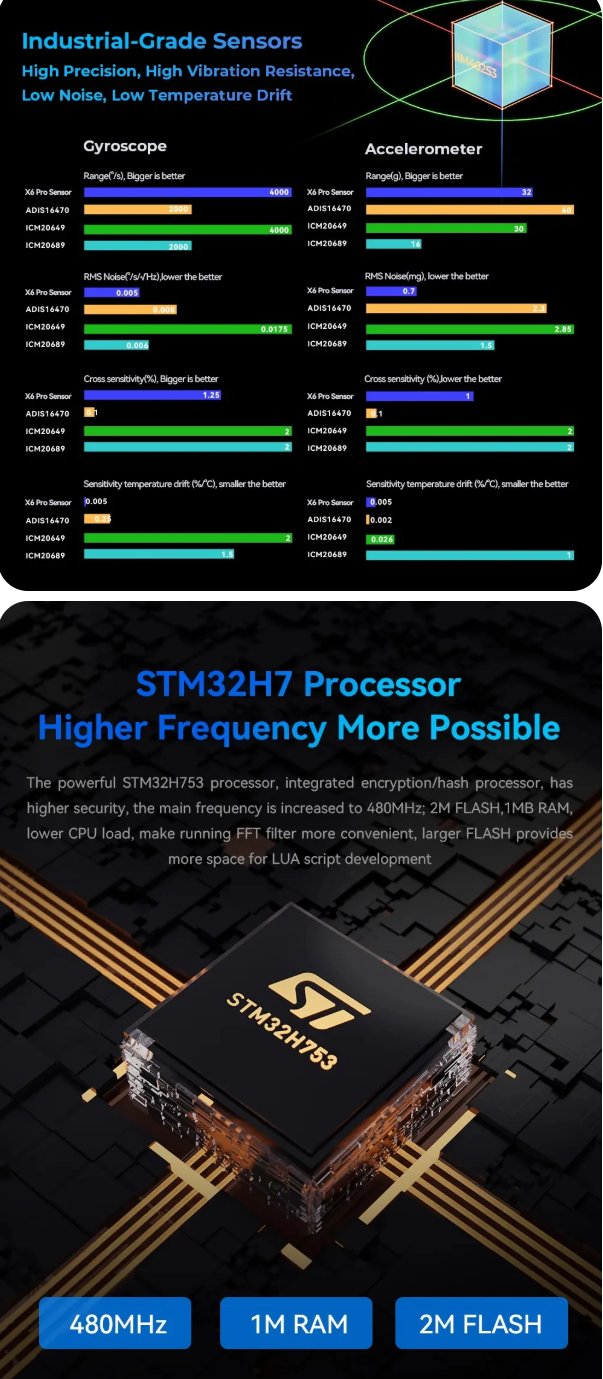
El ZeroOne X6 Pro utiliza sensores de grado industrial con alta precisión, bajo ruido y resistencia a la vibración.Funciona con un procesador STM32H753 de 480MHz con 1MB de RAM, 2MB de FLASH, seguridad mejorada, filtrado FFT y soporte para scripting LUA.
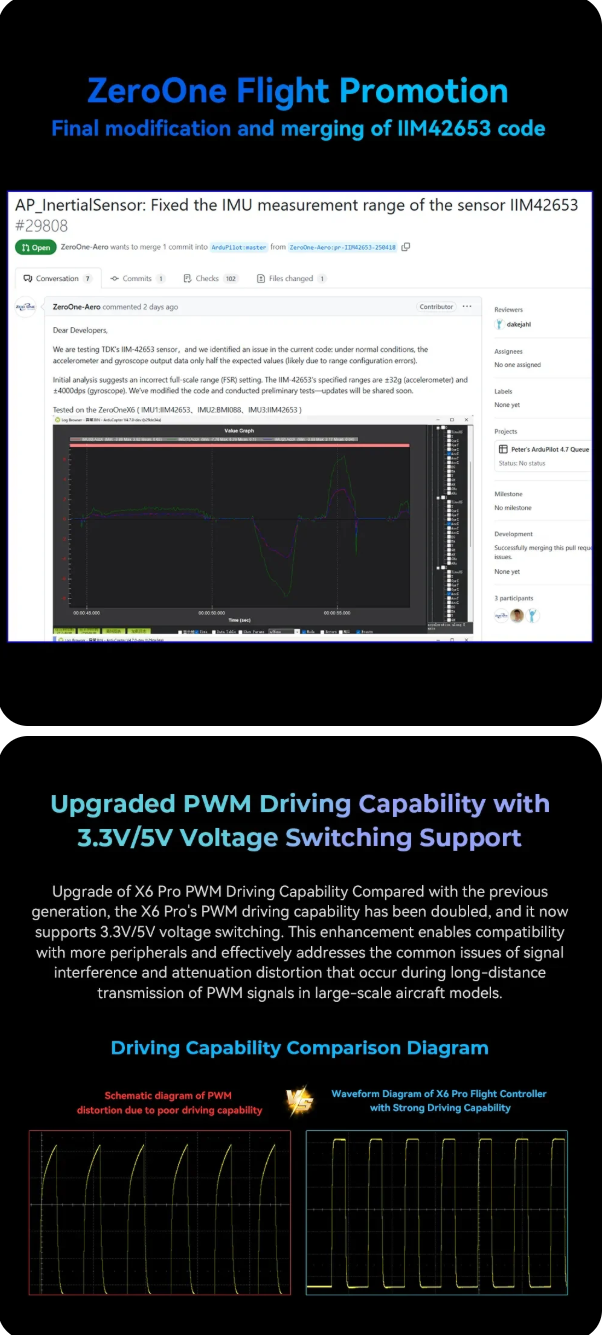
ZeroOne X6 Pro mejora el control PWM con conmutación de 3.3V/5V, capacidad de duplicación para reducir la distorsión de la señal. La corrección del rango del sensor IMU para IIM42653 asegura mediciones precisas, mejorando la estabilidad de vuelo y la compatibilidad periférica.
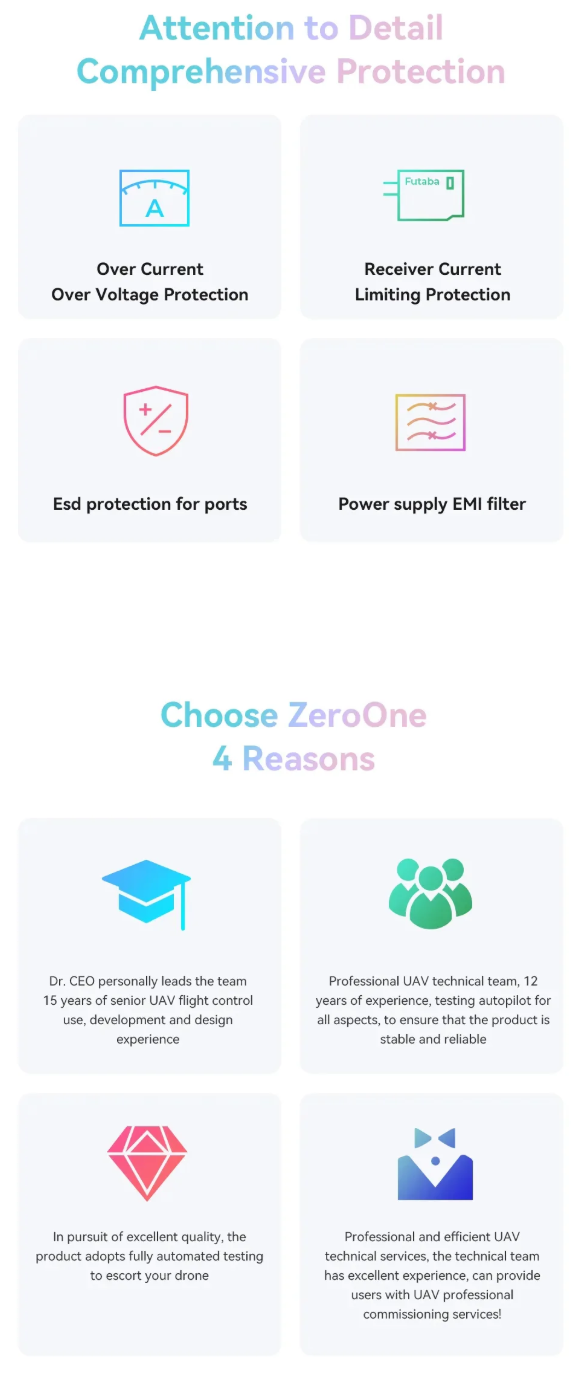
ZeroOne X6 Pro ofrece protección integral: sobrecorriente, sobrevoltaje, ESD y filtrado EMI. Con más de 15 años de experiencia en UAV, el equipo profesional asegura fiabilidad, pruebas automatizadas y soporte técnico eficiente para un rendimiento óptimo del dron.

ZeroOne X6 Pro tiene una esponja absorbente de impactos para estabilidad, reduce la vibración y el ruido, e incluye una interfaz Ethernet de 100M para SLAM, seguimiento visual y funciones avanzadas del dron con integración de Raspberry Pi o Jetson.
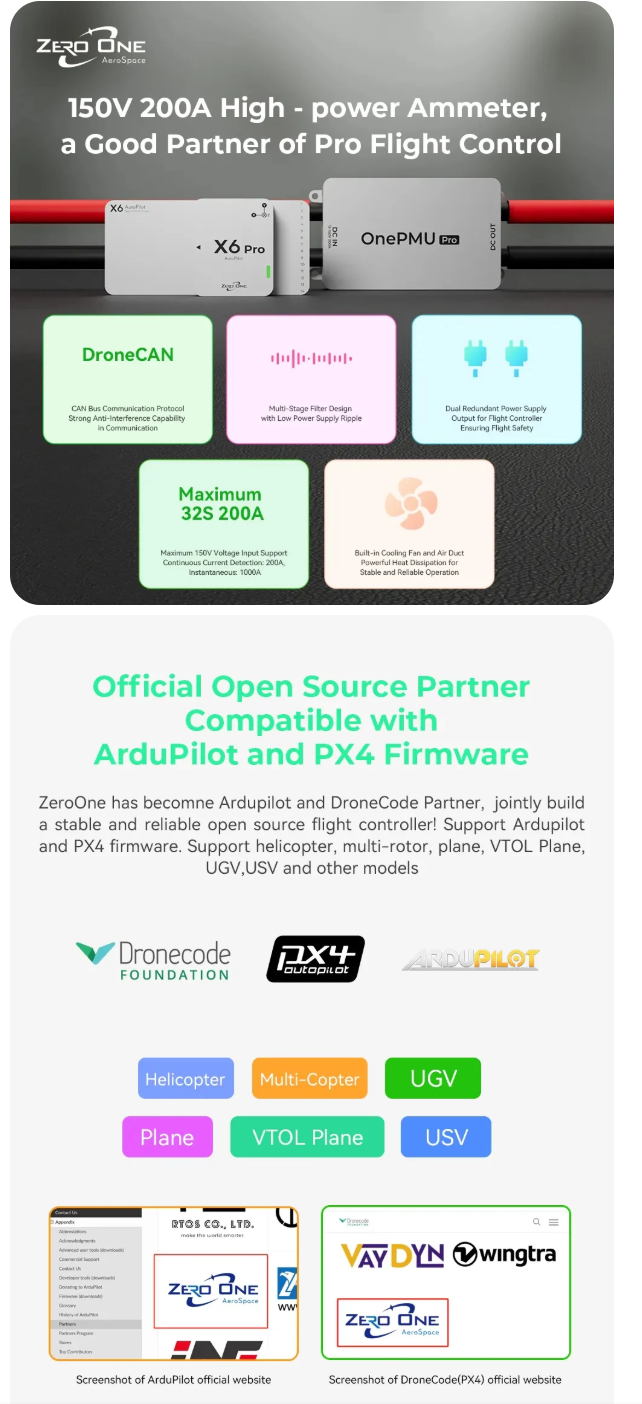
ZeroOne X6 Pro soporta 150V 200A, compatible con ArduPilot y PX4.Características DroneCAN, doble fuente de alimentación, ventilador de enfriamiento, y se adapta a helicópteros, multirrotores, aviones, VTOL, modelos UGV, USV para control de vuelo profesional.
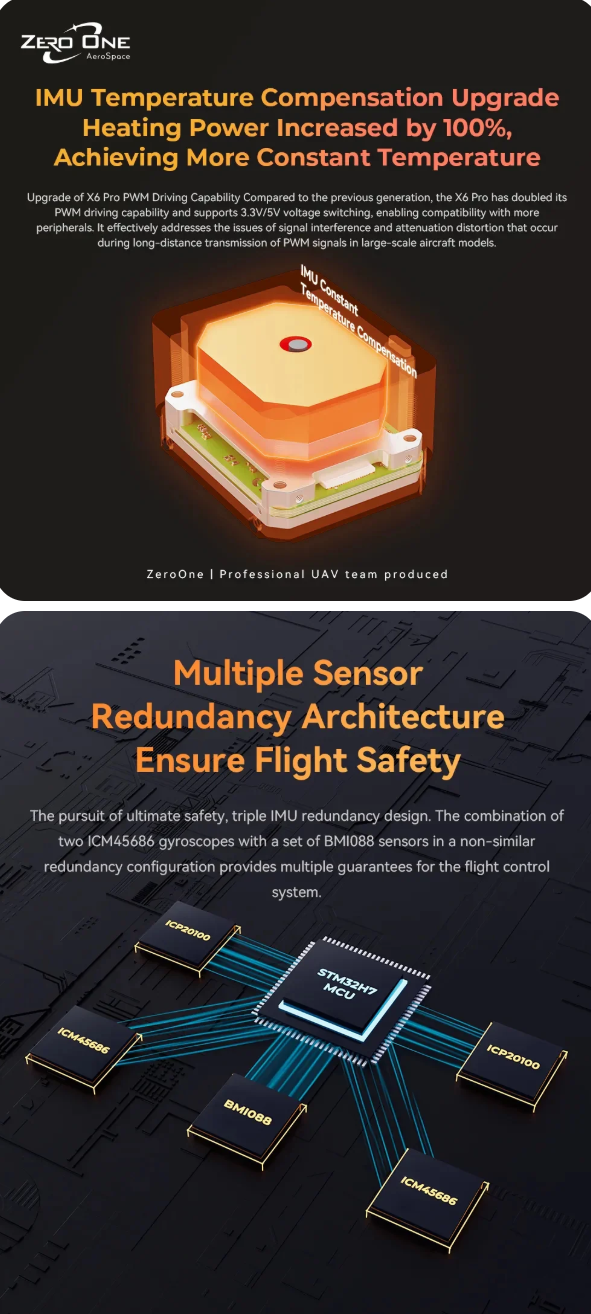
ZeroOne X6 Pro mejora la compensación de temperatura del IMU, duplica la potencia de calefacción y garantiza la seguridad de vuelo a través de la redundancia triple del IMU con sensores ICM45686 y BMI088 conectados al MCU STM32H7.
ZeroOne X6 Pro cuenta con FMU v6X, MCUs STM32, 16 canales PWM, doble alimentación DroneCAN, monitoreo de servo a 9.9V, operación de -20°C a 85°C, peso de 94g, y es compatible con ArduPilot/PX4 para helicópteros, multirrotores, VTOL, UGV y USV.
Related Collections






