








CQ230 असेंबली ड्रोन डेवलपमेंट किट - रास्पबेरी पाई 4बी पिक्सहॉक आर्डुपायलट इंडस्ट्रियल ओपन-सोर्स प्रोग्रामेबल DIY ड्रोन किट एंटी-टकराव रैक के साथ
CQ230 असेंबली ड्रोन डेवलपमेंट किट - रास्पबेरी पाई 4बी पिक्सहॉक आर्डुपायलट इंडस्ट्रियल ओपन-सोर्स प्रोग्रामेबल DIY ड्रोन किट एंटी-टकराव रैक के साथ
RCDrone
पिकअप उपलब्धता लोड नहीं की जा सकी
अवलोकन
CQ230 असेंबली ड्रोन डेवलपमेंट किट एक कॉम्पैक्ट, ओपन-सोर्स है DIY ड्रोन मंच द्वारा संचालित रास्पबेरी पाई 4बी और पिक्सहॉक फ्लाइट कंट्रोलर। 230 मिमी व्हीलबेस, एंटी-कोलिजन फ्रेम और 4S (16.8V) पावर सिस्टम की विशेषता वाला यह ड्रोन ओपन-सोर्स प्रोग्रामेबल सुविधाओं के साथ सीखने और प्रयोग करने के लिए आदर्श है। यह प्लेटफ़ॉर्म वेपॉइंट नेविगेशन, डेटा मॉनिटरिंग और रियल-टाइम वीडियो स्ट्रीमिंग जैसे कार्यों के लिए पूरी तरह से सुसज्जित है, जो इसे डेवलपर्स और शुरुआती लोगों के लिए एक बेहतरीन विकल्प बनाता है।
प्रमुख विशेषताऐं
- संक्षिप्त परिरूप360 मिमी x 360 मिमी x 300 मिमी आकार के साथ, यह ड्रोन छोटे स्थानों के लिए आदर्श है।
- टक्कर रोधी रैकपूर्ण कार्बन फाइबर विरोधी टक्कर फ्रेम स्थायित्व और सुरक्षा सुनिश्चित करता है।
- रास्पबेरी पाई 4B एकीकरण: सुचारू संचालन और विकास के लिए Ubuntu 20.04 के साथ उन्नत।
- ओपन-सोर्स फ्रेमवर्क: द्वारा संचालित अर्दुपायलट, ड्रोनकिट, MAVLink और ROS का समर्थन करता है।
- निर्देशयोग्य कार्यस्वायत्त नेविगेशन, वास्तविक समय डेटा निगरानी और दृश्य प्रसंस्करण में सक्षम।
- वेपॉइंट नेविगेशन: जीपीएस-आधारित सटीकता के साथ मार्ग निर्धारित करें।
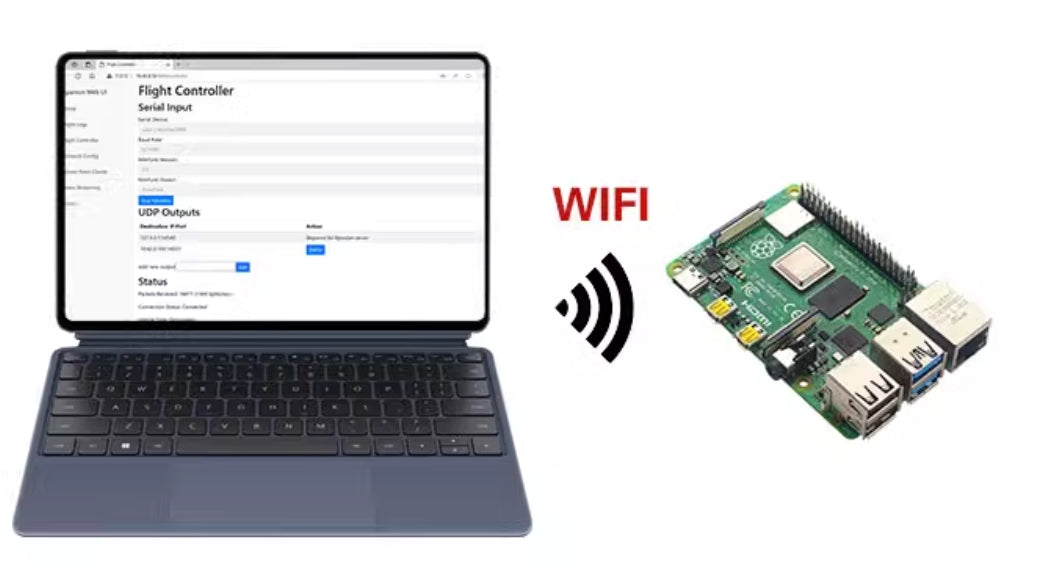
- वास्तविक समय डेटा ट्रांसमिशन: ग्राउंड स्टेशनों पर वाई-फाई-सक्षम डेटा स्थानांतरण।
- दृश्य नेविगेशनसटीक इनडोर नेविगेशन और बाधा से बचाव के लिए दोहरे कैमरा सिस्टम।
- प्रोग्रामयोग्य नियंत्रण: कस्टम उड़ान कमांड बनाने के लिए ड्रोनकिट-पायथन का उपयोग करें।
- सिस्टम सिमुलेशनकार्यक्षमता के निर्बाध परीक्षण के लिए SITL सिमुलेशन को संयोजित करें।
विशेष विवरण
| पैरामीटर | विवरण |
|---|---|
| नमूना | सीक्यू230 |
| व्हीलबेस | 230मिमी |
| बैटरी | 4एस (16.8वी) |
| उड़ान समय | 7 मिनट |
| भार क्षमता | 200 ग्राम |
| पवन प्रतिरोध | स्तर 3-4 |
| अधिकतम गति | 20 किमी/घंटा |
| अधिकतम उड़ान ऊंचाई | 120मी |
| स्थिति सटीकता | 2-3मी (जीपीएस) |
| वज़न | 612 ग्राम |
| रिमोट कंट्रोल रेंज | 700मी |
पैकेट
मूल संस्करण
- पिक्सहॉक 2.4.8 फ्लाइट कंट्रोलर ×1
- एम8एन जीपीएस ×1
- लेडी मिनी पिक्स पावर मॉड्यूल ×1
- CUAV WiFi टेलीमेट्री ×1
- 30A ईएससी ×4
- 5045 प्रोपेलर ×4
- CQ230 फ़्रेम ×1
- A400 बैलेंस चार्जर ×1
- 4S 2300mAh बैटरी ×1
- 2205 मोटर ×4
- FS-i6 रिमोट कंट्रोलर ×1
- बी बी अलार्म बजर ×1
- MF-01 ऑप्टिकल फ्लो मॉड्यूल ×1
दृश्य संस्करण
- पिक्सहॉक 2.4.8 फ्लाइट कंपनीनियंत्रक ×1
- एम8एन जीपीएस ×1
- लेडी मिनी पिक्स पावर मॉड्यूल ×1
- सीएस कैमरा ×1
- 30A ईएससी ×4
- 5045 प्रोपेलर ×4
- CQ230 फ़्रेम ×1
- बी बी अलार्म बजर ×1
- MF-01 ऑप्टिकल फ्लो मॉड्यूल ×1
- A400 बैलेंस चार्जर ×1
- 4S 2300mAh बैटरी ×1
- 2205 मोटर ×4
- FS-i6 रिमोट कंट्रोलर ×1
- रास्पी 4B-4G ऑनबोर्ड कंप्यूटर ×1 सेट
- T265 विज़ुअल कैमरा ×1
अनुप्रयोग
- वितरणहल्के वजन वाली वस्तुओं का कुशलतापूर्वक परिवहन करें।
- शैक्षिक विकास: छात्रों और शोधकर्ताओं के लिए ड्रोन प्रणालियों का पता लगाने के लिए आदर्श।
- दृश्य प्रसंस्करणउन्नत वीडियो स्ट्रीमिंग और विश्लेषण के लिए OpenCV का उपयोग करें।
- नेविगेशन प्रयोगस्वायत्त जीपीएस-आधारित उड़ान और स्थिति ट्रैकिंग के साथ प्रयोग।
अतिरिक्त टिप्पणी
- सिस्टम में उन्नत प्रोग्रामिंग इंटरफ़ेस के लिए Ubuntu 20.04 शामिल है।
- अर्दुपायलट का मजबूत पारिस्थितिकी तंत्र ड्रोन अनुप्रयोगों में मापनीयता और बहुमुखी प्रतिभा सुनिश्चित करता है।
- शुरुआती और पेशेवरों के लिए ट्यूटोरियल के साथ एक पूर्ण शिक्षण किट प्रदान की गई है।
विवरण
CQ230 ओपन-सोर्स ड्रोन सिस्टम

पिक्सहॉक: ड्रोन हार्डवेयर सिस्टम
पिक्सहॉक 2.4.8 कंट्रोलर का उपयोग करता है, जो नए मानक 32-बिट प्रोसेसर STM32F427 से सुसज्जित है और 5611 बैरोमीटर के साथ जोड़ा गया है। यह समृद्ध इंटरफ़ेस विकल्पों के साथ एक लागत प्रभावी ओपन-सोर्स कंट्रोलर है।

ArduPilot: ड्रोन सॉफ्टवेयर सिस्टम
ड्रोन की सॉफ्टवेयर प्रणाली - मूलतः नियंत्रण फर्मवेयर - व्यापक रूप से अपनाई गई ओपन-सोर्स परियोजना ArduPilot का उपयोग करती है।
(ArduPilot एक उन्नत, पूर्ण विशेषताओं वाला और विश्वसनीय ओपन-सोर्स ऑटोपायलट सॉफ्टवेयर सिस्टम प्रदान करता है।)
यह सभी कल्पनीय ड्रोन सिस्टम को नियंत्रित कर सकता है। जो लोग प्रौद्योगिकी, ड्रोन और अन्वेषण से प्यार करते हैं, उनके लिए ArduPilot को समझना आपको एक आकर्षक और आकर्षक दुनिया से परिचित कराएगा।

ArduPilot को दुनिया भर में 1,000,000 से ज़्यादा ड्रोन सिस्टम में इंस्टॉल किया गया है। एडवांस्ड डेटा लॉगिंग, एनालिसिस और सिमुलेशन टूल्स से लैस, यह एक पूरी तरह से परखा हुआ और भरोसेमंद ऑटोपायलट सिस्टम है। इसका इस्तेमाल NASA, Intel, Insitu, Boeing जैसी बड़ी कंपनियों और कंपनियों के साथ-साथ दुनिया भर के कई संस्थानों और विश्वविद्यालयों में भी टेस्टिंग और डेवलपमेंट के लिए किया जाता है।

मिशन प्लानर ग्राउंड कंट्रोल स्टेशन
विशेषताएँ:
- ड्रोन ट्यूनिंग और पैरामीटर सेटअप उपकरण;
- मानचित्रों पर उड़ान पथ निर्धारित करें, जिससे ड्रोन स्वचालित रूप से पूर्व निर्धारित मार्गों का अनुसरण कर सकें;
- ड्रोन को नियंत्रित करने के लिए ड्रॉपडाउन मेनू से मिशन कमांड का चयन करें;
- लॉग डाउनलोड करें और उनका विश्लेषण करें;
- एसआईटीएल (सॉफ्टवेयर इन द लूप) प्रणाली का उपयोग करके सिमुलेशन निष्पादित करें;
- और भी अधिक विशेषताएं आपकी खोज का इंतजार कर रही हैं, और संभावनाएं यहीं समाप्त नहीं होतीं...


| पूर्वनिर्धारित विशेषताएं | मूल संस्करण | दृश्य संस्करण |
|---|
| रेखा चित्रण | ✓ | ✓ |
| ऊंचाई पर पकड़, मंडराना, स्थिरीकरण | ✓ | ✓ |
| घर वापसी, असफलता-रहित वापसी | ✓ | ✓ |
| लैंडिंग, कम बैटरी लैंडिंग | ✓ | ✓ |
| आउटडोर जीपीएस पोजिशनिंग और रूट फ्लाइट | ✓ | ✓ |
| ड्रोनकिट-पायथन प्रोग्रामेबल कंट्रोल | ✓ | ✓ |
| वास्तविक समय डेटा ट्रांसमिशन के लिए वाईफाई टेलीमेट्री (लगभग 5 मीटर रेंज) | ✗ | ✓ |
| इनडोर ऑप्टिकल फ्लो पोजिशनिंग, लेजर एल्टीट्यूड फिक्सिंग | ✓ | ✓ |
| इनडोर डुअल विज़ुअल पोजिशनिंग नेविगेशन, एमपी एंकर पॉइंट्स, रूट फ़्लाइट, क्यूआर कोड पहचान के साथ सटीक लैंडिंग | ✗ | ✓ |
इनडोर उड़ान के लिए उपयुक्त
360 मिमी × 360 मिमी × 300 मिमी के आयामों के साथ कॉम्पैक्ट डिज़ाइन, छोटे स्थान के संचालन के लिए आदर्श।

कार्बन फाइबर फ्रेम, मजबूत और गिरने के लिए प्रतिरोधी

टक्कर रोधी रिंग डिजाइन उड़ान सुरक्षा सुनिश्चित करने के लिए मोटर और प्रोपेलर ब्लेड की प्रभावी रूप से सुरक्षा करता है;

बहु-परिदृश्य कार्यात्मक विकास के लिए उन्नत विस्तारशीलता
मूल मॉडल के आधार पर, सिस्टम में Raspberry Pi 4B जोड़ा गया है और Raspberry Pi सिस्टम को एकीकृत किया गया है। इस सिस्टम में शामिल हैं:
- उबंटू 20.04 (ग्राफ़िकल इंटरफ़ेस वाला ओपन-सोर्स ऑपरेटिंग सिस्टम)
- ड्रोनकिट-पायथन (ड्रोनकिट का उपयोग करके ड्रोन नियंत्रण प्रोग्रामिंग के लिए एक पायथन लाइब्रेरी)
- पाइमावलिंक (MAVLink प्रोटोकॉल का पायथन कार्यान्वयन, जो Pymavlink का उपयोग करके प्रोग्राम योग्य ड्रोन नियंत्रण को सक्षम बनाता है)
- कार्यालयों (रोबोट ऑपरेटिंग सिस्टम)
- मावरोस (आरओएस के माध्यम से ड्रोन को नियंत्रित करने के लिए एक संचार प्रोटोकॉल)
- जीस्ट्रीमर (कम विलंबता वीडियो स्ट्रीमिंग ट्रांसमिशन)
- मावलिंक-राउटर (विभिन्न अंतबिंदुओं पर उड़ान नियंत्रक MAVLink डेटा वितरित करता है)
- ओपनसीवी (कम्प्यूटर विज़न प्रोसेसिंग के लिए ओपन-सोर्स सॉफ्टवेयर लाइब्रेरी)

उपरोक्त प्रणाली के आधार पर, ड्रोन निम्नलिखित कार्य कर सकता है:
- ड्रोनकिट-पायथन का उपयोग करके प्रोग्रामयोग्य ड्रोन नियंत्रण
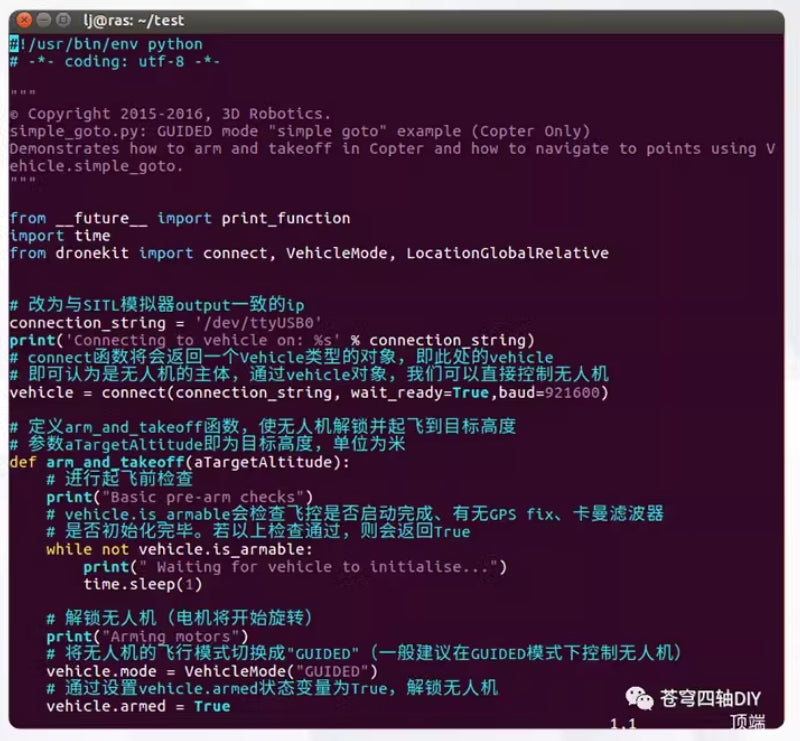
2. ओपन सीवी विज़ुअल प्रोसेसिंग
एक सीएसआई कैमरा जोड़ा गया, जिससे छवि संचरण और पोस्ट-प्रोसेसिंग सक्षम हो गई:
- दृश्य स्ट्रीम को रास्पबेरी पाई का उपयोग करके कैप्चर किया जा सकता है और ओपनसीवी जैसे उपकरणों के साथ संसाधित किया जा सकता है।
- वास्तविक समय के एचडी वीडियो स्ट्रीम को प्रसंस्करण के लिए पीसी पर वापस भेजा जा सकता है या समीक्षा के लिए मोबाइल डिवाइस पर भेजा जा सकता है।

3. वास्तविक समय एचडी वीडियो ट्रांसमिशन
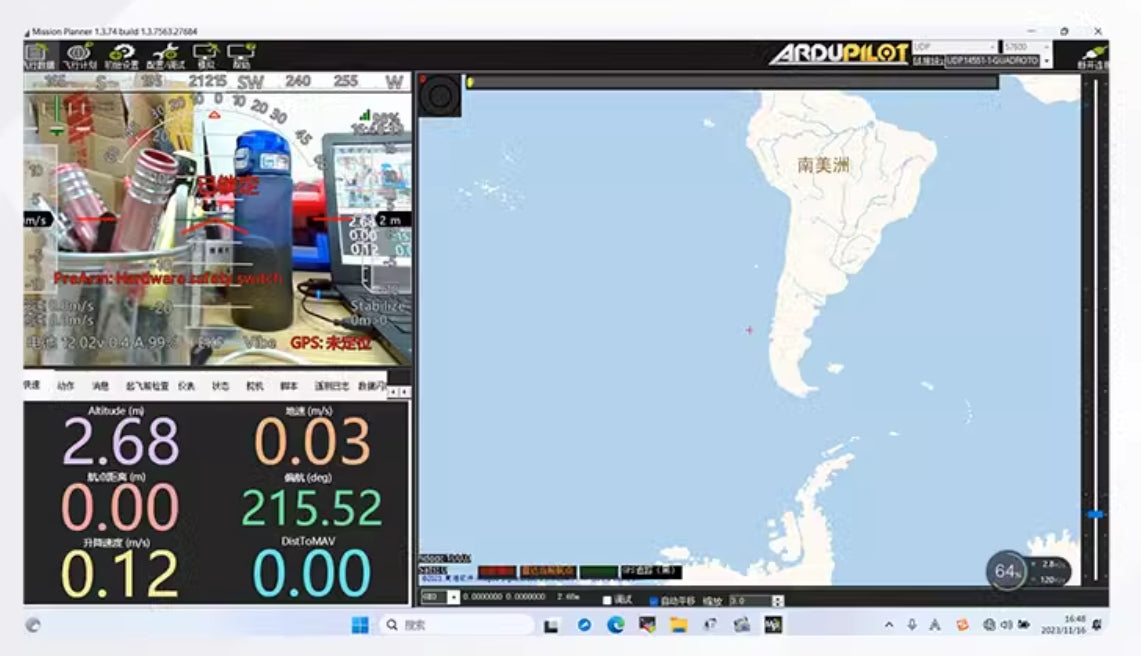
4.ग्राउंड स्टेशन डेटा मॉनिटरिंग
वाई-फाई नेटवर्क और पीसी ग्राउंड स्टेशन (एमपी) के बीच संचार और छवि संचरण अतिरिक्त संचरण मॉड्यूल की आवश्यकता के बिना प्राप्त किया जा सकता है। पीसी के 4बी के वाई-फाई हॉटस्पॉट से कनेक्ट होने के बाद, डेटा और छवि संचरण को एक्सेस करके शुरू किया जा सकता है 10.42.0.10:3000 वेब ब्राउज़र के माध्यम से.
5. उपरोक्त ओपन-सोर्स सिस्टम के आधार पर अतिरिक्त सुविधाएँ और एल्गोरिदम सत्यापन विकसित करना
दृश्य संस्करण सहायक ट्यूटोरियल:
मूल संस्करण ट्यूटोरियल के अलावा, रास्पबेरी पाई विज़ुअल प्रोसेसिंग के लिए परिचयात्मक ट्यूटोरियल भी प्रदान किए गए हैं।
Related Collections









