-
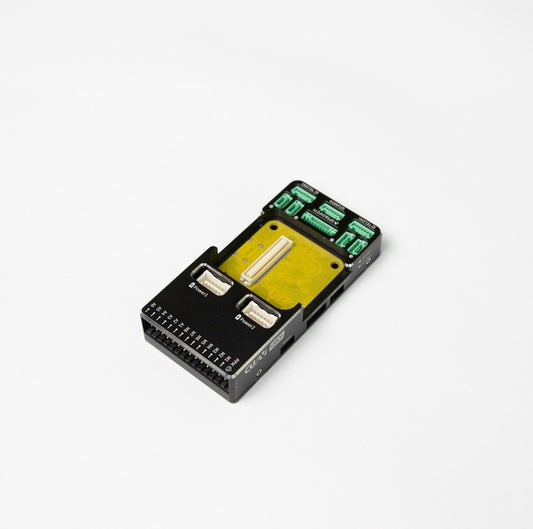
CUAV V5+ Scheda portante Pilota automatico Pixhawk Controllore di volo - FPV RC Drone Quadcopter Elicottero VTOL
Prezzo di listino $192.64 USDPrezzo di listinoPrezzo unitario per -
CUAV NEW V5 + controller di volo autopilota - base su FMU V5 Hardware open source per FPV RC Drone Quadcopter Helicopter Pixhawk
Prezzo di listino Da $554.59 USDPrezzo di listinoPrezzo unitario per -
CUAV V5+/X7+ Scheda Base Controller di Volo, Pixhawk FMU v5, STM32F765, PX4/ArduPilot
Prezzo di listino Da $208.60 USDPrezzo di listinoPrezzo unitario per -
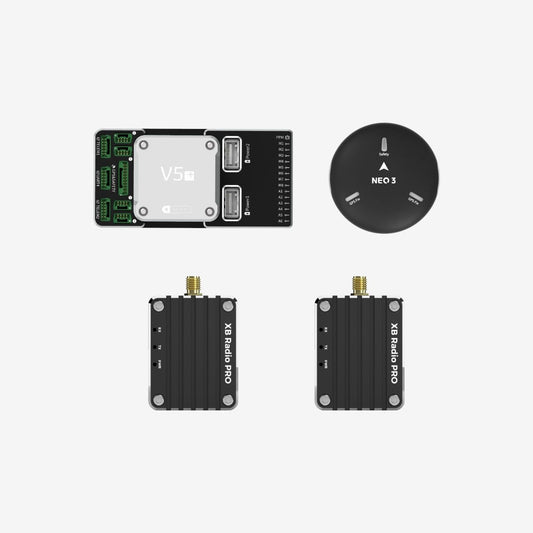
Pacchetto elicottero multirotore CUAV New Match - Controller di volo con pilota automatico V5+ NEO 3 GPS e set di telemetria XBEE Pro
Prezzo di listino $1,066.02 USDPrezzo di listinoPrezzo unitario per -
CUAV P9 Dati radio e Pixhawk Drone Fpv V5+ Controllore di volo NEO 3 Pro GPS Telemetria Combo
Prezzo di listino $1,645.35 USDPrezzo di listinoPrezzo unitario per -
CUAV Nuovo pacchetto da una a più stelle con V5+ Flight Flightcase RTK 9Ps GPS e kit combinato radiotelemetria P900
Prezzo di listino $5,056.40 USDPrezzo di listinoPrezzo unitario per -
CUAV Nuovo set di kit one-to-multiple con controller di volo V5+ RTK 9Ps GPS P9 Radio Telemetria GNSS
Prezzo di listino $3,832.45 USDPrezzo di listinoPrezzo unitario per -
CUAV Pixhawk Drone Fpv V5+ Controllore di volo NEO 3 Pro GPS e modulo SKYE per velocità dell'aria Combo
Prezzo di listino $1,105.22 USDPrezzo di listinoPrezzo unitario per -
CUAV NUOVO Pixhack Pixhawk V5+ Pilota automatico - FPV RC Drone Quadcopter Controllore di volo per elicottero e NEO V2 3 Pro GPS Combo
Prezzo di listino Da $616.54 USDPrezzo di listinoPrezzo unitario per -
CUAV VTOL Rc Drone Pixhawk Autopilot V5+ Pacchetto scheda portante principale con NEO 3 GPS e telemetria P9 Combo
Prezzo di listino $1,869.14 USDPrezzo di listinoPrezzo unitario per -
CUAV Pixhawk Drone Fpv V5+ Controllore di volo NEO 3 Pro GPS e modulo PMU di alimentazione CAN combinato
Prezzo di listino $1,057.20 USDPrezzo di listinoPrezzo unitario per -
CUAV CAN PDB Scheda porta pilota automatico V5+ Plus Core - Controller di volo RC Drone Pixhawk
Prezzo di listino $826.81 USDPrezzo di listinoPrezzo unitario per -
CUAV NUOVO Drone UAV FPV V5+ Pilota automatico Pixhawk Controllore di volo con modulo Lidar radar TF Luna
Prezzo di listino $657.82 USDPrezzo di listinoPrezzo unitario per -
CUAV NUOVO V5 + Hardware Design Pixhack Pixhawk Pilota automatico Telecomando di volo FPV RC Drone Quadcopter Trasporto in elicottero
Prezzo di listino $408.00 USDPrezzo di listinoPrezzo unitario per