Controller di volo con pilota automatico Holybro Pixhawk 5X
Controller di volo con pilota automatico Holybro Pixhawk 5X
HolyBro
Impossibile caricare la disponibilità di ritiro
Pixhawk® 5X è l'ultimo aggiornamento della famiglia di successo di Pixhawk® controllori di volo, basati sullo standard aperto Pixhawk® FMUv5X e sullo standard bus autopilota Pixhawk®. È dotato dell'ultimo PX4 Autopilot® preinstallato, con tripla ridondanza, controllo della temperatura e sensore isolato, che garantisce prestazioni e affidabilità incredibili.
All'interno del Pixhawk® 5X è presente un STM32F7 basato su STMicroelectronics®, abbinato alla tecnologia dei sensori di Bosch®, InvenSense®, che offre flessibilità e affidabilità per il controllo di qualsiasi veicolo autonomo, adatto sia per applicazioni accademiche che commerciali. Il microcontrollore F7 del Pixhawk® 5X ha una memoria flash da 2 MB e 512 KB di RAM. Il PX4 Autopilot sfrutta la maggiore potenza e RAM. Grazie alla potenza di elaborazione aggiornata, gli sviluppatori possono essere più produttivi ed efficienti con il loro lavoro di sviluppo, consentendo algoritmi e modelli complessi.
Lo standard aperto FMUv5X include IMU ad alte prestazioni e basso rumore a bordo, progettate per una migliore stabilizzazione. Tripla IMU ridondante e doppio barometro ridondante su bus separati. Quando il PX4 Autopilot rileva un guasto del sensore, il sistema passa senza problemi a un altro per mantenere l'affidabilità del controllo di volo.
Un LDO indipendente alimenta ogni set di sensori con controllo di potenza indipendente. Un isolamento delle vibrazioni di nuova concezione filtra le vibrazioni ad alta frequenza e riduce il rumore per garantire letture accurate, consentendo ai veicoli di raggiungere migliori prestazioni di volo complessive. Il bus sensore esterno (SPI5) ha due linee di selezione chip e segnali data-ready per sensori aggiuntivi e payload con interfaccia SPI e con un Microchip Ethernet PHY integrato (LAN8742AI-CZ-TR), ora è supportata la comunicazione ad alta velocità con i computer di missione tramite Ethernet. Due porte di monitoraggio batteria intelligente (SMBus), supporto per il modulo di alimentazione SMBus INA226.
Pixhawk® 5X è perfetto per sviluppatori presso laboratori di ricerca aziendali, startup, accademici (ricerca, professori, studenti) e applicazioni commerciali. Pixhawk 5X è compatibile con entrambi PX4 Autopilota e Firmware Ardupilot.
Nota:
- Pixhawk 5X richiede il protocollo I2C per i dati di tensione e corrente dal modulo di alimentazione come PM02D, i moduli di potenza analogici (PM02, PM06, PM07) non sono compatibili con Pixhawk 5X. Tabella comparativa dei moduli di potenza
- Viene fornito con firmware PX4 di default. L'utente può anche usare il firmware Ardupilot flashando il firmware tramite Mission Planner o QGroundControl.
Punti chiave di progettazione
- Controllore di volo modulare: IMU, FMU e sistema di base separati collegati da un connettore Pixhawk® Autopilot Bus a 100 pin e uno a 50 pin, progettato per sistemi flessibili e personalizzabili
- Ridondanza: 3 sensori IMU e 2 sensori barometro su bus separati, che consentono un funzionamento parallelo e continuo anche in caso di guasto hardware
- Domini a tripla ridondanza: domini di sensori completamente isolati con bus separati e controllo di potenza separato
- Sistema di isolamento dalle vibrazioni per filtrare le vibrazioni ad alta frequenza e ridurre il rumore per garantire letture accurate
- Interfaccia Ethernet per l'integrazione del computer di missione ad alta velocità
- Calibrazione automatica del sensore che elimina segnali e temperature variabili
- Le IMU sono controllate dalla temperatura tramite resistenze di riscaldamento integrate, consentendo una temperatura di lavoro ottimale delle IMU
Specifiche tecniche
- Processore FMU: STM32F765
- 32 bit Arm® Cortex®-M7, 216 MHz, 2 MB di memoria, 512 KB di RAM
- Processore IO: STM32F100
- Processore Arm® Cortex®-M3 a 32 bit, 24 MHz, 8 KB di SRAM
- Sensori di bordo
- Accel/Gyro: ICM-20649 (montato in modo fisso)
- Accel/Giroscopio: ICM-42688P (montaggio morbido)
- Accel/Giroscopio: ICM-20602 o BMI088 (Montaggio morbido)
- Rivista: BMM150
- Barometro: 2x BMP388
Dati elettrici
- Tensione nominale:
- Tensione massima di ingresso: 6V
- Ingresso alimentazione USB: 4,75~5,25 V
- Ingresso servo rail: 0~36V
Interfacce
- 16- Uscite servo PWM
- Ingresso R/C per Spektrum / DSM
- Ingresso R/C dedicato per ingresso PPM e S.Bus
- Ingresso RSSI analogico/PWM dedicato e S.Uscita bus
- 4 porte seriali per uso generale
- 3 con controllo del flusso completo
- 1 con limite di corrente separato di 1A
- 1 con I2C e linea GPIO aggiuntiva per lettore NFC esterno
- 2 porte GPS
- 1 porta GPS completa più interruttore di sicurezza
- 1 porta GPS di base
- 1 porta I2C
- 1 porta Ethernet
- Applicazioni senza trasformatore
- 100 Mbps
- 1 bus SPI
- 2 linee di selezione chip
- 2 linee pronte per i dati
- 1 linea SPI SYNC
- 1 linea di reset SPI
- 2 CAN Bus per periferiche CAN
- Il CAN Bus ha controlli silenziosi individuali o controllo ESC RX-MUX
- 2 porte di ingresso alimentazione con SMBus
- 1 porta AD e IO
- 2 ingressi analogici aggiuntivi
- 1 ingresso PWM/cattura
- 2 Linee di debug e GPIO dedicate
Dati meccanici
- Dimensioni
- Modulo del controllore di volo: 38,8 x 31,8 x 14,6 mm
- Mini battiscopa: Dimensioni: 43,4 x 72,8 x 14,2 mm
- Baseboard standard v1: 52,4 x 103,4 x 16,7 mm
- Baseboard standard v2A: 40,2 x 92,3 x 18,4 mm
- Baseboard standard v2B: 40,2 x 98,3 x 16,9 mm
- Peso
- Modulo di controllo del volo: 23g
- Mini battiscopa: 26.8g
- Baseboard standard v1: 51g
- Baseboard standard v2A: 58g
- Baseboard standard v2B: 58g
SKU 11045 include:
- Modulo di controllo di volo Pixhawk 5X
SKU 20307/SKU 20320/SKU20310 include:
- Modulo di controllo di volo Pixhawk 6X
- Baseboard standard v2A/v2B o Mini Baseboard
- Modulo di potenza PM02D HV
- Set di cavi
- Modulo di controllo di volo Pixhawk 6X
- Baseboard standard v2A/v2B o Mini Baseboard
- Modulo di potenza PM02D HV
- Set di cavi
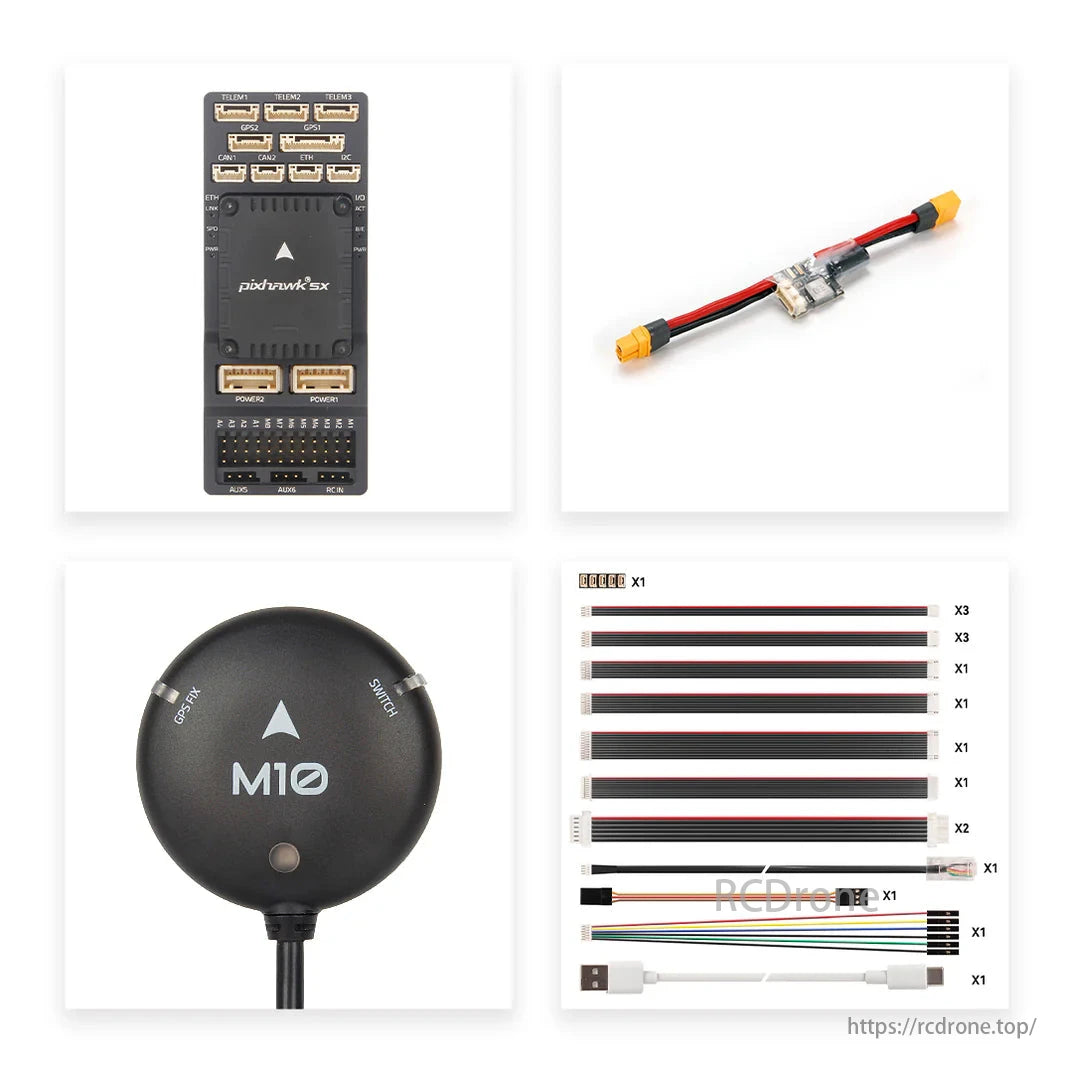
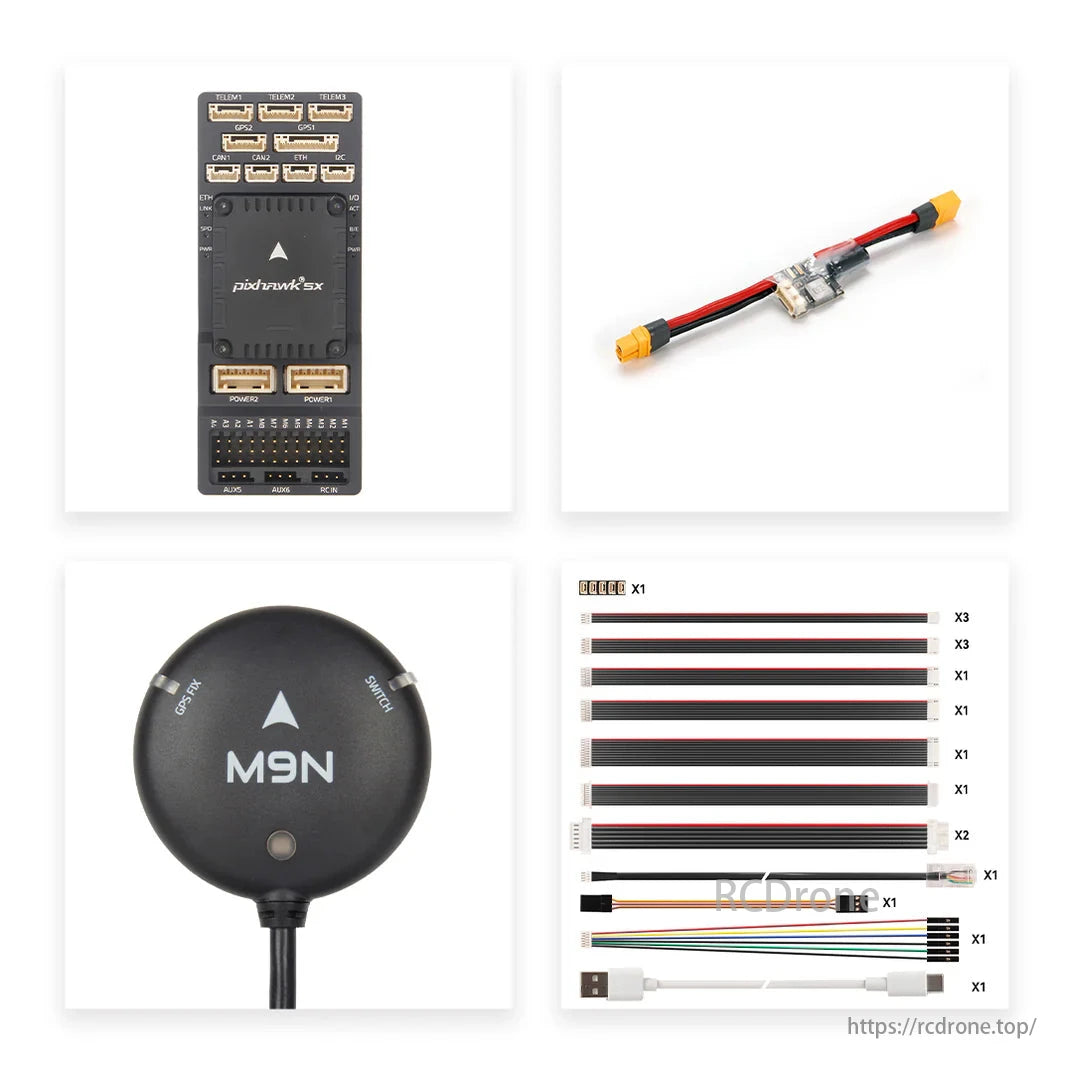
- M9N/M10 GPS
Pixhawk mini, Pixhawk Baseboard v1 e due varianti di Pixhawk Baseboard v2 (v2A e v2B) sono mostrate con le dimensioni. Il mini è 43,4 x 72,8 mm, v1 è 52 x 101,90 mm, v2A è 40,2 x 92,3 mm e v2B è 40,2 x 98,3 mm.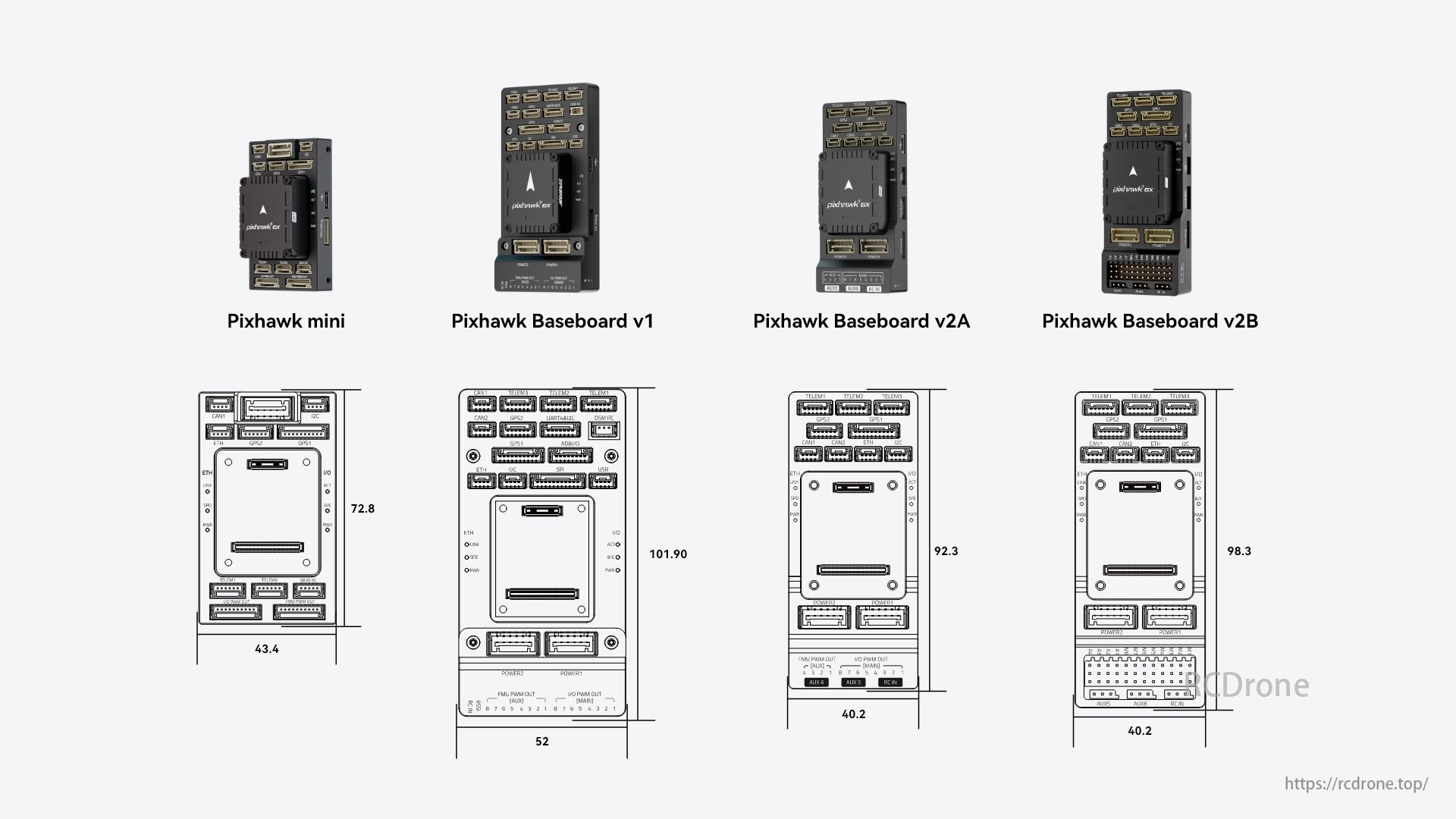
Guida campione di cablaggio

Lo schema dell'Holybro Pixhawk 5X include GPS primario e secondario, porte UART4 e I2C, CAN1 e 2, ricevitore DSM RC, radio di telemetria, telecamera IP FPV HD, batteria, modulo di alimentazione, ESC e una scheda di distribuzione dell'alimentazione.
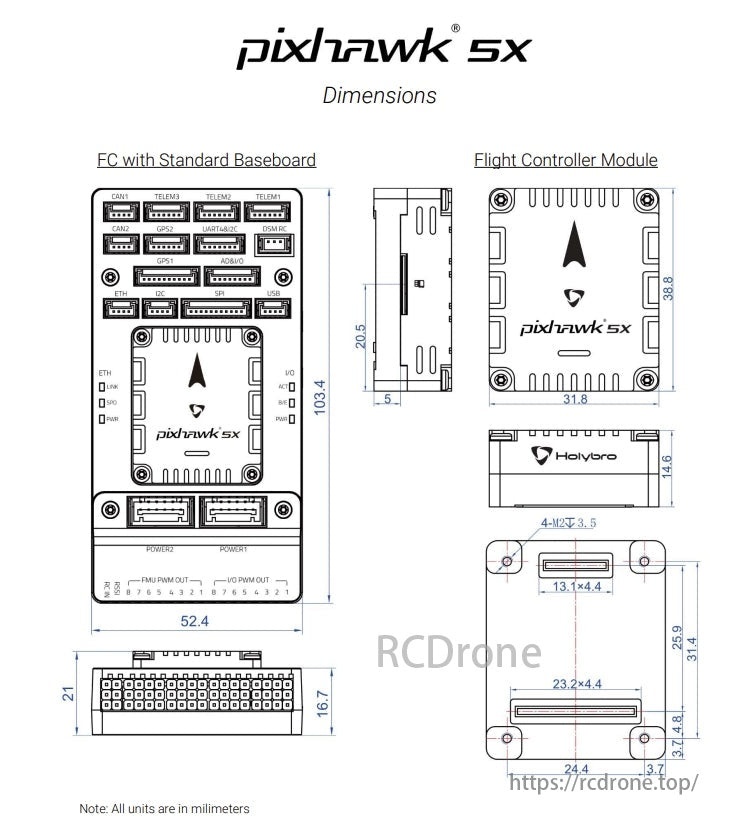
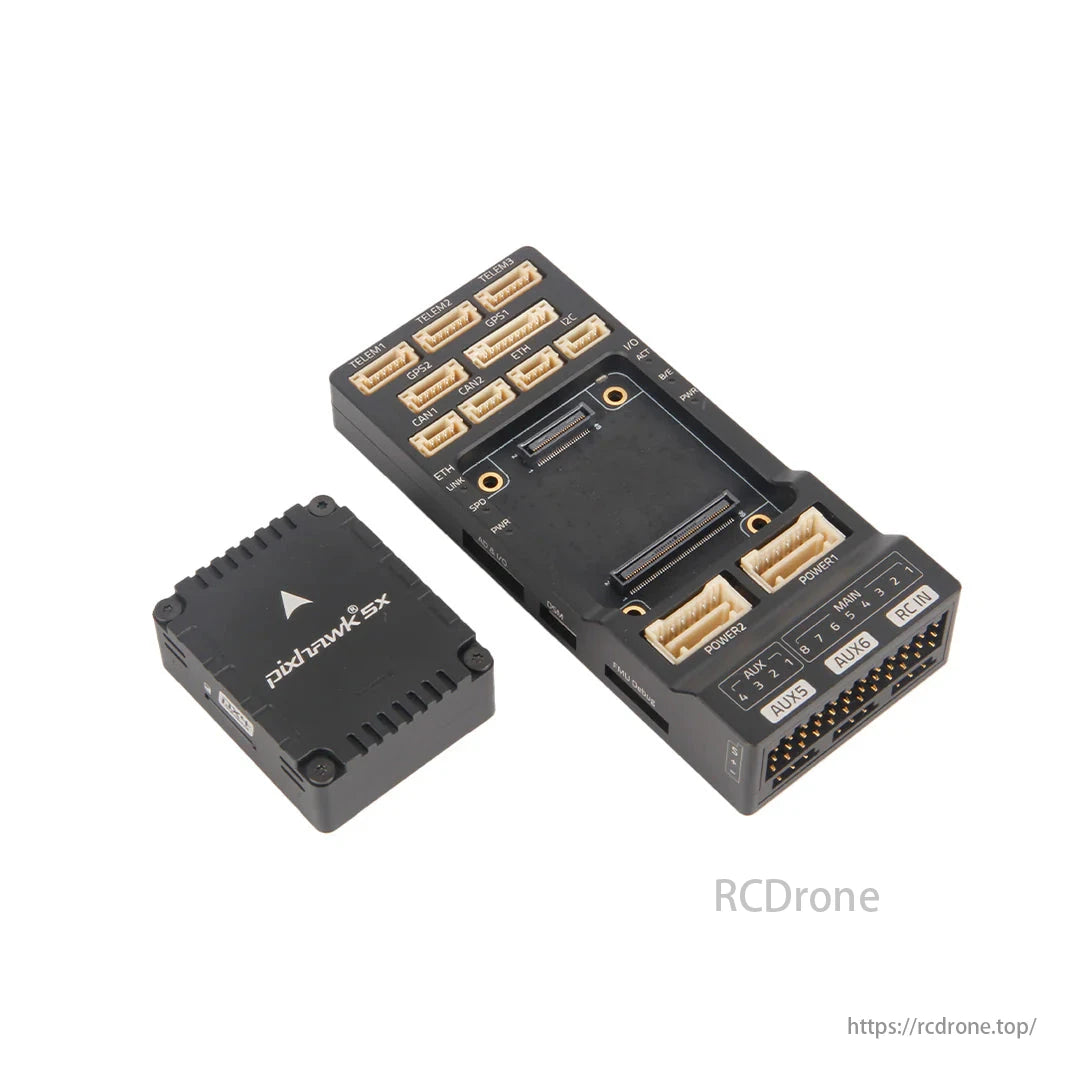
Le dimensioni del Pixhawk SX includono un modulo flight controller e FC con baseboard standard. Il modulo misura 31,8 x 38,8 mm, mentre la baseboard è 103,4 x 52,4 mm. Tutte le unità sono in millimetri.

Dimensioni standard della scheda madre: 103,4 x 58 x 10,7 mm, con varie porte e connettori, tra cui USB, Ethernet e ingressi di alimentazione.


Controllore di volo Pixhawk 5X con porte TELEM1-3, GPS1-2, CAN1-2, ETH, I2C, POWER1-2, AUX5-6 e RC IN.
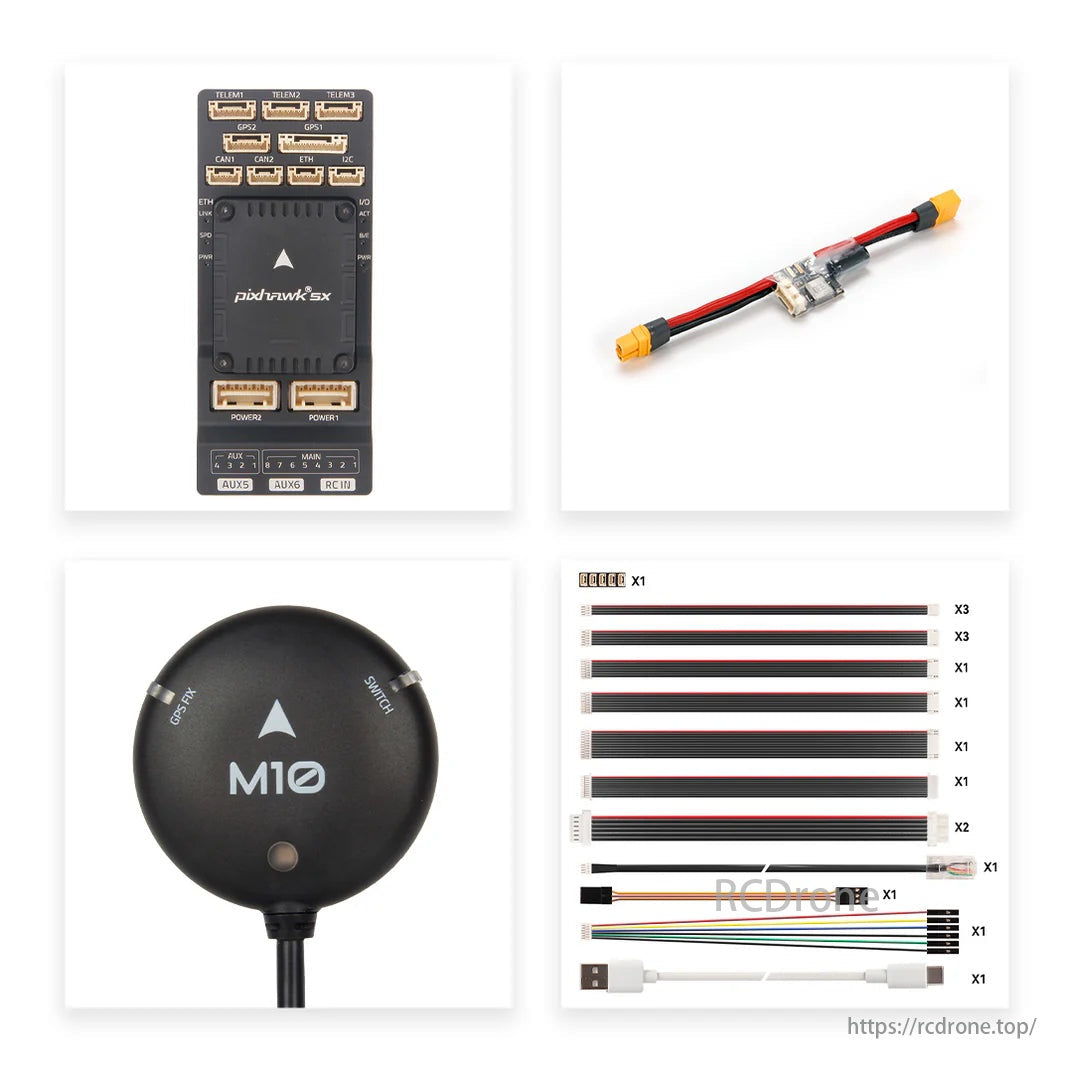
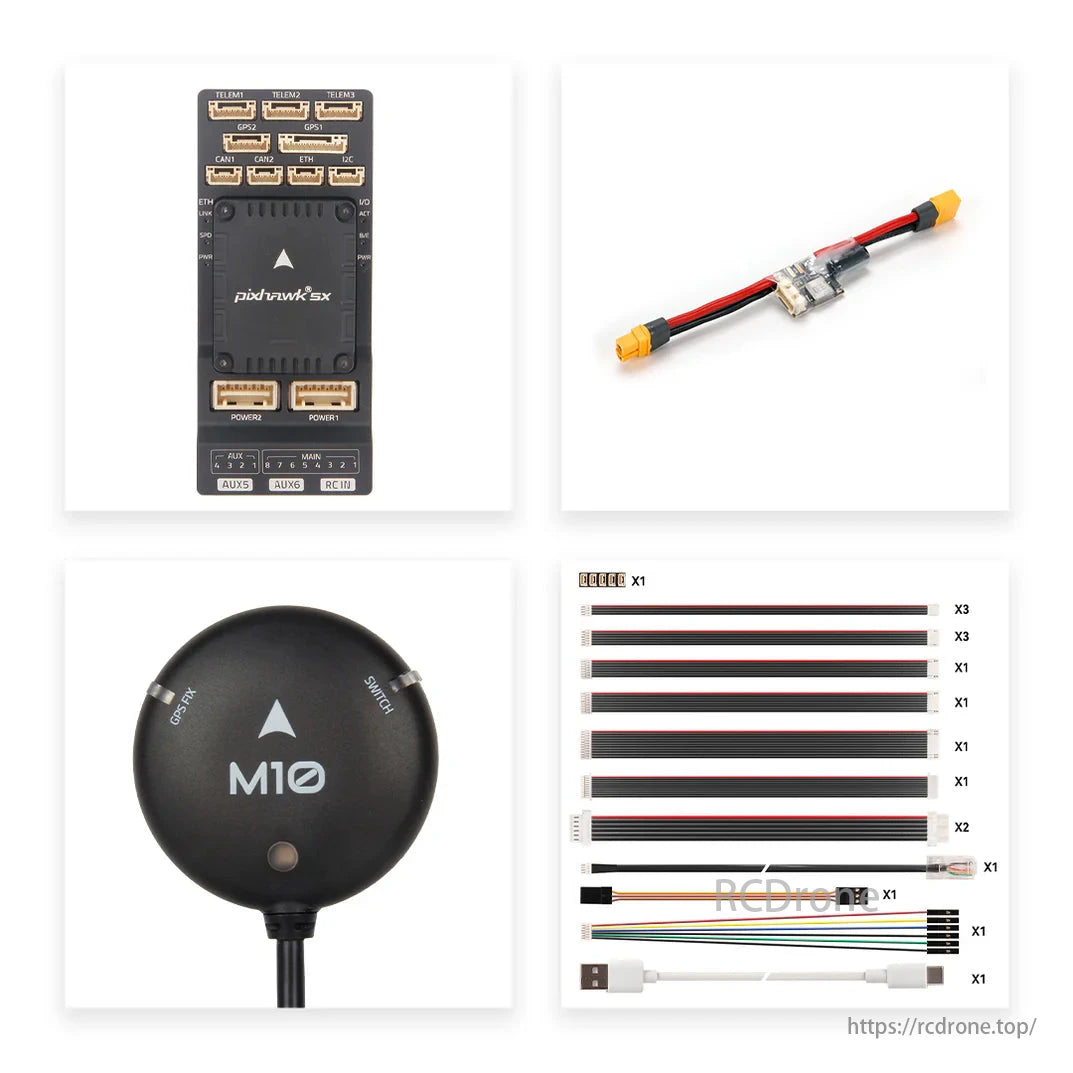
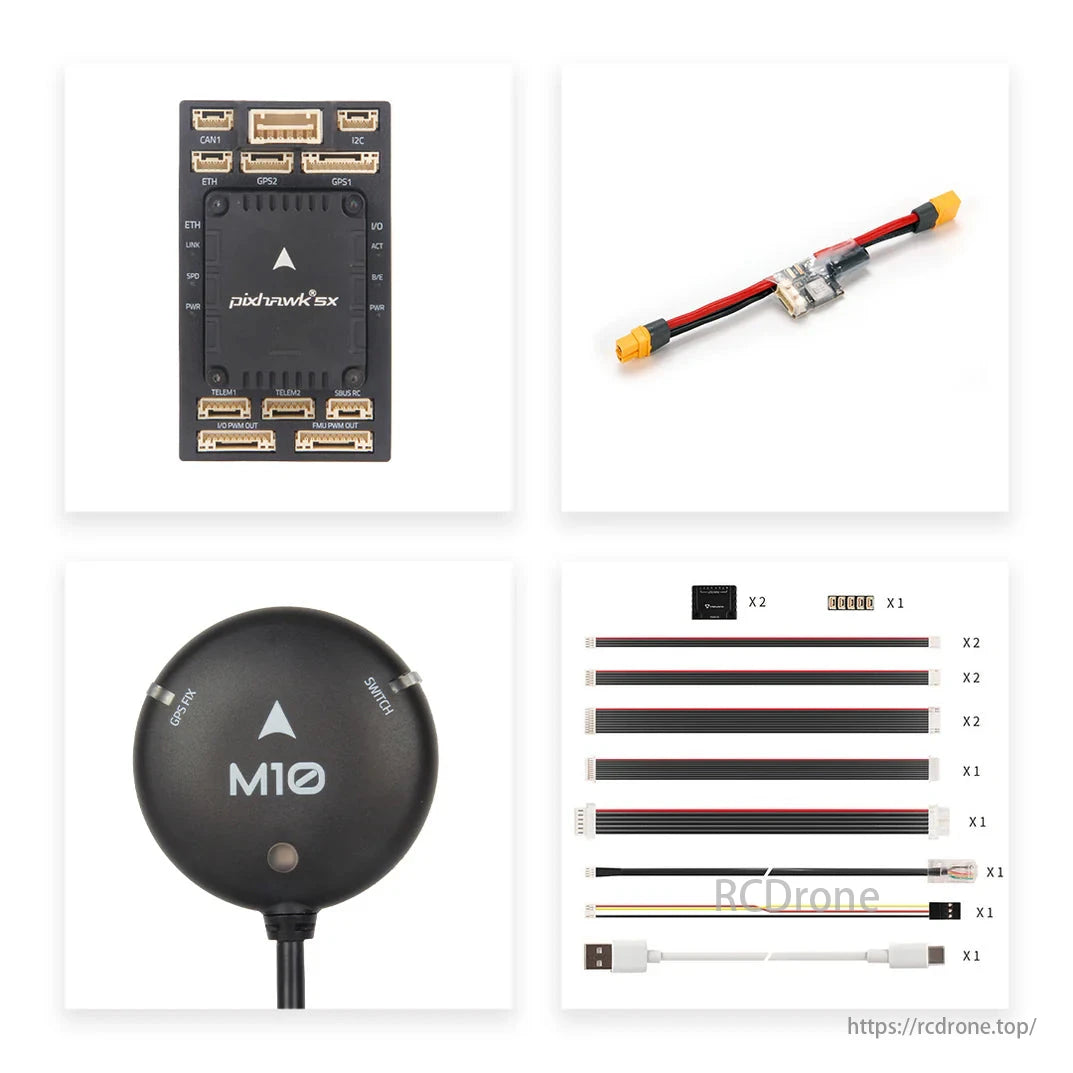
Controllore di volo Pixhawk 5X, modulo GPS M10, modulo di alimentazione e vari cavi per l'assemblaggio del drone.
Related Collections