








CQ230 アセンブリドローン開発キット - Raspberry Pi 4B Pixhawk Ardupilot 産業用オープンソース プログラマブル DIY ドローン キット 衝突防止ラック付き
CQ230 アセンブリドローン開発キット - Raspberry Pi 4B Pixhawk Ardupilot 産業用オープンソース プログラマブル DIY ドローン キット 衝突防止ラック付き
RCDrone
受取状況を読み込めませんでした
概要
CQ230アセンブリドローン開発キットは、コンパクトなオープンソースの DIYドローン プラットフォームは ラズベリーパイ4B そして ピクホーク フライト コントローラー。230 mm のホイール ベース、衝突防止フレーム、4S (16.8V) 電源システムを備えたこのドローンは、オープン ソースのプログラム可能な機能の学習と実験に最適です。このプラットフォームは、ウェイポイント ナビゲーション、データ監視、リアルタイム ビデオ ストリーミングなどのタスクに完全に対応しており、開発者にも初心者にも最適な選択肢です。
主な特徴
- コンパクトなデザイン: 360mm x 360mm x 300mmのサイズなので、狭いスペースに最適です。
- 衝突防止ラック: フルカーボンファイバー製の衝突防止フレームにより、耐久性と保護性が確保されます。
- Raspberry Pi 4B 統合: スムーズな操作と開発のために Ubuntu 20.04 で強化されました。
- オープンソースフレームワーク: 搭載 アルドゥパイロットDronekit、MAVLink、ROS をサポートします。
- プログラム可能 タスク: 自律航行、リアルタイムデータ監視、視覚処理が可能。
- ウェイポイントナビゲーション: GPS ベースの精度でルートを設定します。
- リアルタイムデータ伝送: 地上局への WiFi 対応データ転送。
- ビジュアルナビゲーション: 正確な屋内ナビゲーションと障害物回避を実現するデュアルカメラ システム。
- プログラム可能なコントロール: Dronekit-Python を使用してカスタム飛行コマンドを作成します。
- システムシミュレーション: SITL シミュレーションを組み合わせて、機能をシームレスにテストします。
仕様
| パラメータ | 詳細 |
|---|---|
| モデル | CQ230 |
| ホイールベース | 230mm |
| バッテリー | 4S(16.8V) |
| 飛行時間 | 7分 |
| 積載容量 | 200グラム |
| 風の抵抗 | レベル3-4 |
| 最高速度 | 時速20キロ |
| 最大飛行高度 | 120メートル |
| 位置決め精度 | 2~3m(GPS) |
| 重さ | 612グラム |
| リモコン範囲 | 700メートル |
パッケージ
基本バージョン
- Pixhawk 2.4.8 フライトコントローラー ×1
- M8N GPS ×1
- Ledi MINI PIX 電源モジュール ×1
- CUAV WiFiテレメトリ×1
- 30A ESC ×4
- 5045 プロペラ ×4
- CQ230フレーム×1
- A400バランスチャージャー×1
- 4S 2300mAhバッテリー×1
- 2205モーター×4
- FS-i6 リモートコントローラー ×1
- BBアラームブザー×1
- MF-01 オプティカルフローモジュール ×1
ビジュアルバージョン
- ピクホーク2.4。8フライトカンパニーコントローラー ×1
- M8N GPS ×1
- Ledi MINI PIX 電源モジュール ×1
- CSカメラ×1
- 30A ESC ×4
- 5045 プロペラ ×4
- CQ230フレーム×1
- BBアラームブザー×1
- MF-01 オプティカルフローモジュール ×1
- A400バランスチャージャー×1
- 4S 2300mAhバッテリー×1
- 2205モーター×4
- FS-i6 リモートコントローラー ×1
- Raspi 4B-4Gオンボードコンピューター×1セット
- T265ビジュアルカメラ×1
アプリケーション
- 配達: 軽量物を効率的に輸送します。
- 教育開発: 学生や研究者がドローン システムを調査するのに最適です。
- 視覚処理: 高度なビデオストリーミングと分析には OpenCV を使用します。
- ナビゲーション実験: GPS ベースの自律飛行と位置追跡を試します。
追加メモ
- システムには、プログラミング インターフェイスが強化された Ubuntu 20.04 が含まれています。
- Ardupilot の堅牢なエコシステムにより、ドローン アプリケーションの拡張性と汎用性が保証されます。
- 初心者からプロまでを対象としたチュートリアル付きの完全な学習キットです。
詳細
CQ230 オープンソースドローンシステム

Pixhawk: ドローンハードウェアシステム
Pixhawk 2.4.8 コントローラを採用し、新しい標準 32 ビット プロセッサ STM32F427 を搭載し、5611 気圧計とペアになっています。豊富なインターフェイス オプションを備えたコスト効率の高いオープン ソース コントローラです。

ArduPilot: ドローン ソフトウェア システム
ドローンのソフトウェア システム (基本的には制御ファームウェア) は、広く採用されているオープン ソース プロジェクト ArduPilot を使用します。
(ArduPilot は、高度でフル機能を備えた信頼性の高いオープンソースの自動操縦ソフトウェア システムを提供します。)
考えられるあらゆるドローン システムを制御できます。テクノロジー、ドローン、探検が好きな人にとって、ArduPilot を理解することは、魅力的で魅力的な世界を知るきっかけとなるでしょう。

ArduPilot は、世界中で 1,000,000 台以上のドローン システムに導入されています。高度なデータ ロギング、分析、シミュレーション ツールを備え、徹底的にテストされた信頼性の高い自動操縦システムです。NASA、Intel、Insitu、Boeing などの大手組織や企業、世界中の多数の研究所や大学でもテストや開発に使用されています。

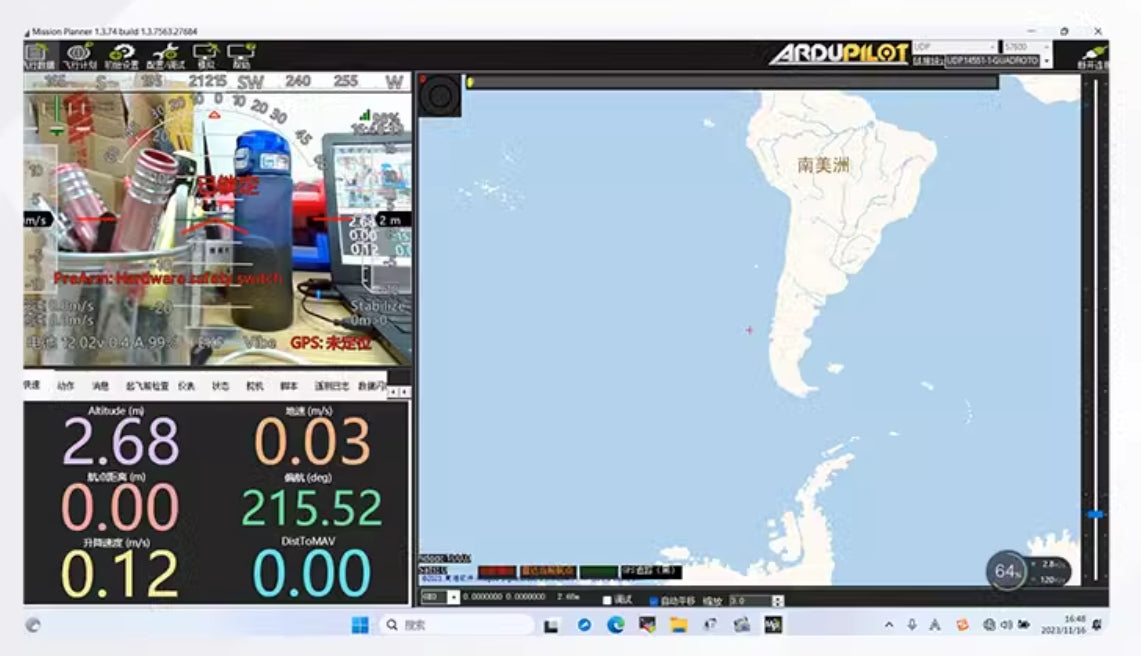
ミッションプランナー地上管制ステーション
特徴:
- ドローンのチューニングおよびパラメータ設定ツール。
- 地図上に飛行経路を設定し、ドローンが事前に設定されたルートを自動的にたどることができるようにします。
- ドロップダウン メニューからミッション コマンドを選択してドローンを制御します。
- ログをダウンロードして分析します。
- SITL (Software In The Loop) システムを使用してシミュレーションを実行します。
- さらに多くの機能があなたの発見を待っています。可能性はここで終わりません...


| 定義済み機能 | 基本バージョン | ビジュアルバージョン |
|---|
| 線画 | ✓ | ✓ |
| 高度維持、ホバリング、安定化 | ✓ | ✓ |
| 帰還、フェイルセーフ帰還 | ✓ | ✓ |
| 着陸、バッテリー残量低下着陸 | ✓ | ✓ |
| 屋外GPS測位とルート飛行 | ✓ | ✓ |
| Dronekit-Python プログラマブル制御 | ✓ | ✓ |
| リアルタイムデータ伝送のための WiFi テレメトリ (約 5m の範囲) | ✗ | ✓ |
| 屋内オプティカルフローポジショニング、レーザー高度固定 | ✓ | ✓ |
| 屋内デュアルビジュアルポジショニングナビゲーション、MPアンカーポイント、ルートフライト、QRコード認識による正確な着陸 | ✗ | ✓ |
屋内飛行に最適
寸法 360mm × 360mm × 300mm のコンパクトな設計で、狭いスペースでの操作に最適です。

カーボンファイバーフレーム、丈夫で落下に強い

衝突防止リングの設計により、モーターとプロペラのブレードを効果的に保護し、飛行の安全性を確保します。

マルチシナリオ機能開発のための拡張性の向上
このシステムは基本モデルをベースに、Raspberry Pi 4B を追加し、Raspberry Pi システムを統合しました。このシステムには以下が含まれます。
- ウブントゥ 20.04 (グラフィカル インターフェイスを備えたオープン ソース オペレーティング システム)
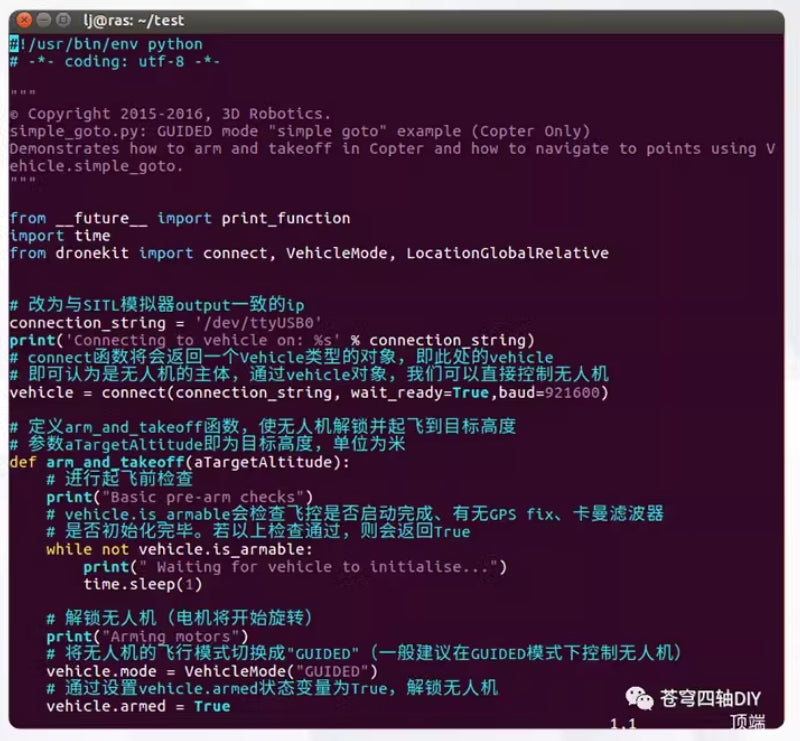
- ドローンキットPython (Dronekit を使用してドローン制御をプログラミングするための Python ライブラリ)
- ピマヴリンク (MAVLink プロトコルの Python 実装。Pymavlink を使用してプログラム可能なドローン制御を可能にします)
- ロス (ロボットオペレーティングシステム)
- マブロス (ROS経由でドローンを制御するための通信プロトコル)
- Gストリーマー (低遅延ビデオストリーミング伝送)
- Mavlinkルーター (フライトコントローラーのMAVLinkデータをさまざまなエンドポイントに配布します)
- オープンCV (コンピュータビジョン処理用のオープンソースソフトウェアライブラリ)

上記のシステムに基づいて、ドローンは次のことを達成できます。
- Dronekit-Python を使用したプログラム可能なドローン制御
2. OPEN CV ビジュアル処理
CSI カメラを追加し、画像転送と後処理が可能になりました。
- ビジュアル ストリームは、Raspberry Pi を使用してキャプチャし、OpenCV などのツールで処理できます。
- リアルタイムの HD ビデオ ストリームは、処理のために PC に送り返したり、確認のためにモバイル デバイスに送信したりすることもできます。

3. リアルタイムHDビデオ伝送
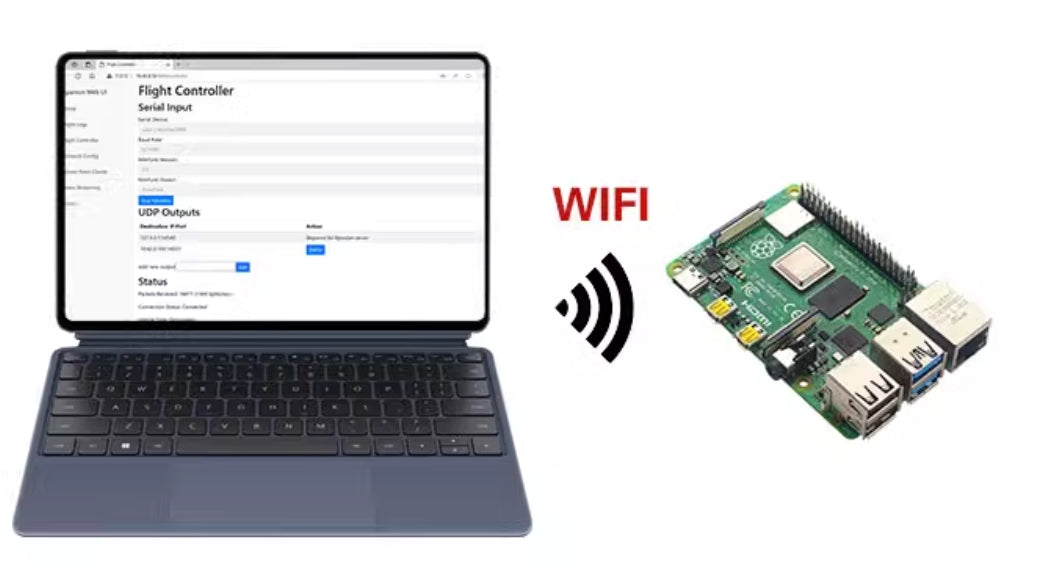
4.地上局データ監視
WiFiネットワークとPC地上局(MP)間の通信と画像伝送は、追加の伝送モジュールを必要とせずに実現できます。PCが4BのWiFiホットスポットに接続した後、アクセスすることでデータと画像の伝送を開始できます。 10.42.0.10:3000 Webブラウザ経由で。
5. 上記オープンソースシステムに基づく追加機能の開発とアルゴリズムの検証
ビジュアルバージョンをサポートするチュートリアル:
基本版チュートリアルに加え、Raspberry Pi ビジュアル処理の入門チュートリアルも提供されます。
Related Collections









