![3DR Radio V5 Telemetry, [4] [1] [2] [3] Radio Talemet](https://rcdrone.top/cdn/shop/files/Se888e7b6abd54def8a6cc8819de18cf6Q.webp?v=1714815991)
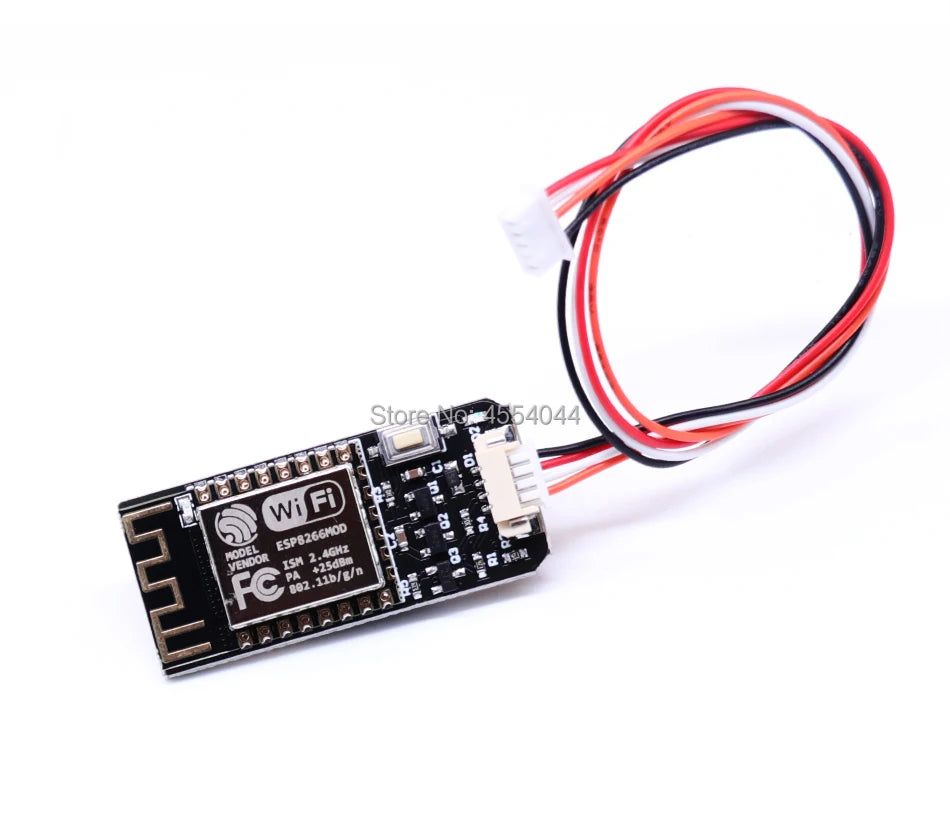










1.Gebruik een 6P-lijn voor verbinding met Pixhawk-vluchtcontroller.
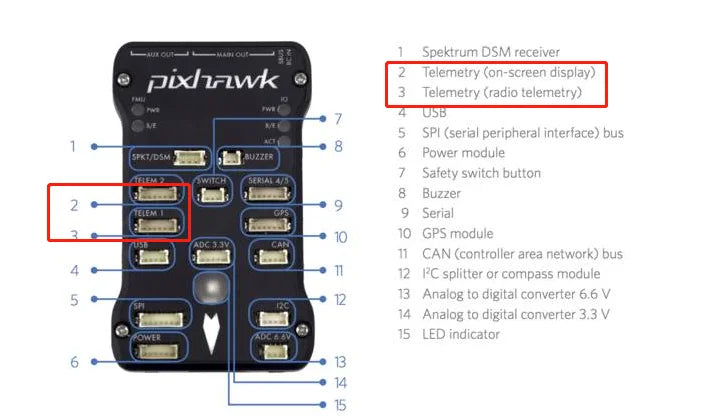
Vanwege de verschillende firmware kunnen bij sommige firmware twee poorten worden gebruikt, terwijl sommige firmware slechts één van de poorten kan gebruiken. Zoek dus een van de beschikbare poorten voor de verbinding.
Als u PX4-firmware gebruikt, kan alleen TELEM1 worden gebruikt, maar TELEM2 niet.
Als je Arduino-firmware gebruikt, zoek dan een van de beschikbare poorten voor de verbinding.
2.Let op:
-
Wanneer u een radiotelemetrieverbinding gebruikt, moet deze een 3DR-voedingsmodule of 5V ESC gebruiken om de vluchtbesturing van stroom te voorzien. USB kan niet worden aangesloten omdat de USB-prioriteit hoger is dan Radiotelemetrie. If USB-kabel is aangesloten, deze kan niet worden gebruikt voor radiotelemetrietransmissie.
-
De standaard baudrate van de radiotelemetrie is 57600, niet 115200. Selecteer de juiste COM-poort en selecteer niet AUTO. -
Als er een driverprobleem is, kunt u deze downloaden van hier: pix.rctoysky.com/CP210x_VCP_Windows.rar