






CUAV Pixhawk V6X V2 Drone Controller voor PX4 ArduPilot, STM32H753IIK6, RM3100, 100Mbps Ethernet
CUAV Pixhawk V6X V2 Drone Controller voor PX4 ArduPilot, STM32H753IIK6, RM3100, 100Mbps Ethernet
CUAV
Kan beschikbaarheid voor afhalen niet laden
Overzicht
CUAV Pixhawk V6X V2 is een Pixhawk-serie droneregelaar ontworpen voor PX4 en ArduPilot autopilot firmware. Het volgt de Pixhawk FMU v6x standaard en modulaire ontwerpfilosofie, met geüpgradede industriële redundante sensoren, een constante temperatuur externe klok en MCU warmteafvoerontwerp, 5V/3.3V PWM-niveau schakeling, en een gepatenteerde schokabsorptiestructuur. De standaard PMU 2 Lite stroombeheer module ondersteunt 70V invoer en 220A stroomdetectie.
Belangrijkste Kenmerken
- H7 dubbele precisie floating-point eenheid (STM32H753IIK6); 480MHz dubbele precisie floating-point eenheid; 2M Flash-geheugen
- Industriële kwaliteit verschillende drievoudige redundante IMU-matrix met onafhankelijk bus- en voedingsontwerp (IIM-42652, BMI088, ICM-45686)
- Gecombineerde dubbele redundante barometer (BMP581, ICP-20100)
- Core schokabsorptiesysteem met drie assen (X, Y, Z) schokabsorptie; hellend vierhoekig ondersteuningsontwerp; nieuw type schokabsorberend materiaal
- Automotive-grade RM3100 magnetische kompas voor robuuste afwijzing van magnetische interferentie
- IMU externe kristal klokcompensatie (gebruikt met hoge precisie constante temperatuur externe klok om ODR-fouten te verminderen en gevoeligheid en synchronisatie te verbeteren)
- Constant temperatuur controlesysteem: thermisch geleidende silicone en IMU temperatuurcompensatie om temperatuurgerelateerde drift te verminderen
- Flexibele software die schakelt tussen 5V en 3.3V PWM-uitgangsniveaus
- Geïntegreerde 100 Mbps Ethernet-interface voor hoge snelheid gegevenssynchronisatie met apparaten zoals missiecomputers en meetcamera's
- Ondersteunt veilige opstart en veilige firmware-update diensten
- Multi-redundant voeding ontwerp; ondersteunt 2-kanaals CAN PMU-ingang; inclusief PMU 2 Lite als standaard
- Onderste montagegaten toegevoegd voor directe schroefmontage; montagegaten compatibel met M2 standaard schroeven
Specificaties
| Processor | STM32H753IIK6 |
| Coprocessor | STM32F103 |
| Versie | Pixhawk V6XV2 |
| CPU / geheugen (vermeld) | 480MHz dubbele precisie floating-point eenheid; 2M Flash-geheugen |
| Versnellingsmeter & gyroscoop | IIM-42652; BMI088; ICM-45686 |
| Kompas | RM3100 |
| Barometer | BMP581; ICP-20100 |
| PWM I/O | 16 |
| PWM-niveau | 3.3V / 5V (software schakeling) |
| Kracht | 2 (2 CAN voedingsinterfaces) |
| GPS-poort | 2 (GPS1: GPS-interface met I2C en veiligheidschakelaar; GPS2: interface met I2C en GPS) |
| TELEM-poort | 3 |
| CAN-bus | 2 |
| PPM RC | 1 (toegewezen invoer voor PPM-ontvanger) |
| SBUS/DSM/RSSI | 2 (1 SBUS/DSM/Spektrum invoer; 1 analoog 3.3V/PWM invoer) |
| SBUS uitgangen | 1 |
| FMU debug | 1 |
| IO debug | 1 |
| Ethernet | 1 (100 Mbps) |
| SPI extern 1 | 1 (SP16 interface voor externe sensoruitbreiding) |
| ADIO | 1 (AD3.3/ADC6.6) |
| UART4 | 1 |
| USB-poort | 2 (Type-C x1; GH interface x1 voor USB externe verbinding) |
| TF-kaart | 1 |
| Voedingsmodule | Standaard PMU 2 Lite (5V versie), invoerspanning: 12-70V |
| Bedrijfsspanning | USB: 4.75-5.25V; PMU 2 Lite: 12-70V; Vermogen: 4.85-5.45V |
| Bedrijfstemperatuur | -20 tot 85C |
| Afmetingen | 45 x 85.1 x 29.2 mm |
| Gewicht | Controller: 97.9g; Kern: 43.1g; Draagplaat (inclusief schroeven): 54.8g |
| Montage-opmerking (diagramtekst) | Montagegaten compatibel met M2 standaard schroeven; afmetingen weergegeven: 72 mm; 22.50 mm; 24 mm |
Wat is inbegrepen
- Pixhawk V6X V2 x1
- CAN PMU 2 Lite 5V Voedingsmodule x1
- PMU 2 Lite-5V Header Voedingskabel (X7+ (V6X) Versie), draadlengte: 25cm x1
- CAN/I2C Uitbreidingsbord x1
- TF Geheugenkaart x1
- Type-C Kabel, draadlengte: 100cm x1
- DSM RC Kabel, draadlengte: 30cm x1
- SBUS RC Kabel, draadlengte: 30cm x1
- PPM RC/SBUS UIT Kabel, draadlengte: 30cm x1
- Ethernet Kabel, draadlengte: 40cm x1
- CAN Kabel, draadlengte: 30cm x1
- TELEM Kabel, draadlengte: 30cm x1
- UART 4 Kabel, draadlengte: 30cm x1
- UART4 -> I2C Kabel, draadlengte: 30cm x1
- ADIO Kabel, draadlengte: 30cm x1
- Debug Kabel, draadlengte: 10cm x1
- USB -> Type-C Vrouwelijke Connector Verlengkabel, draadlengte: 50cm x1
- 3M Dubbelzijdig x2
Toepassingen
- Compatibel met ArduPilot en PX4
- Ondersteunt multi-rotor, vaste vleugel, VTOL vaste vleugel, onbemande helikopter, onbemande voertuigen en onbemande schepen (onderzeeërs)
- Hoge-snelheid Ethernet gegevenssynchronisatie met missiecomputers en andere boordapparaten waar ondersteund
Voor compatibiliteitscontroles en installatievragen, neem contact op met [email protected] of bezoek https://rcdrone.top/.
Video
Details

De Pixhawk V6X V2 vluchtcontroller maakt gebruik van een H7-processor en heeft een drievoudig redundante IMU, dubbele barometer en RM3100-kompas met een schokabsorberend ontwerp.

De Pixhawk V6X V2 gebruikt een STM32H753IIK6 H7-processor om PX4- en ArduPilot-gebaseerde vluchtcontrolesystemen te ondersteunen.

De Pixhawk V6X V2 maakt gebruik van een schokabsorberende montage met drie assen (X, Y, Z) en vier hellende hoeksteunen om trillingen en geluid te verminderen.
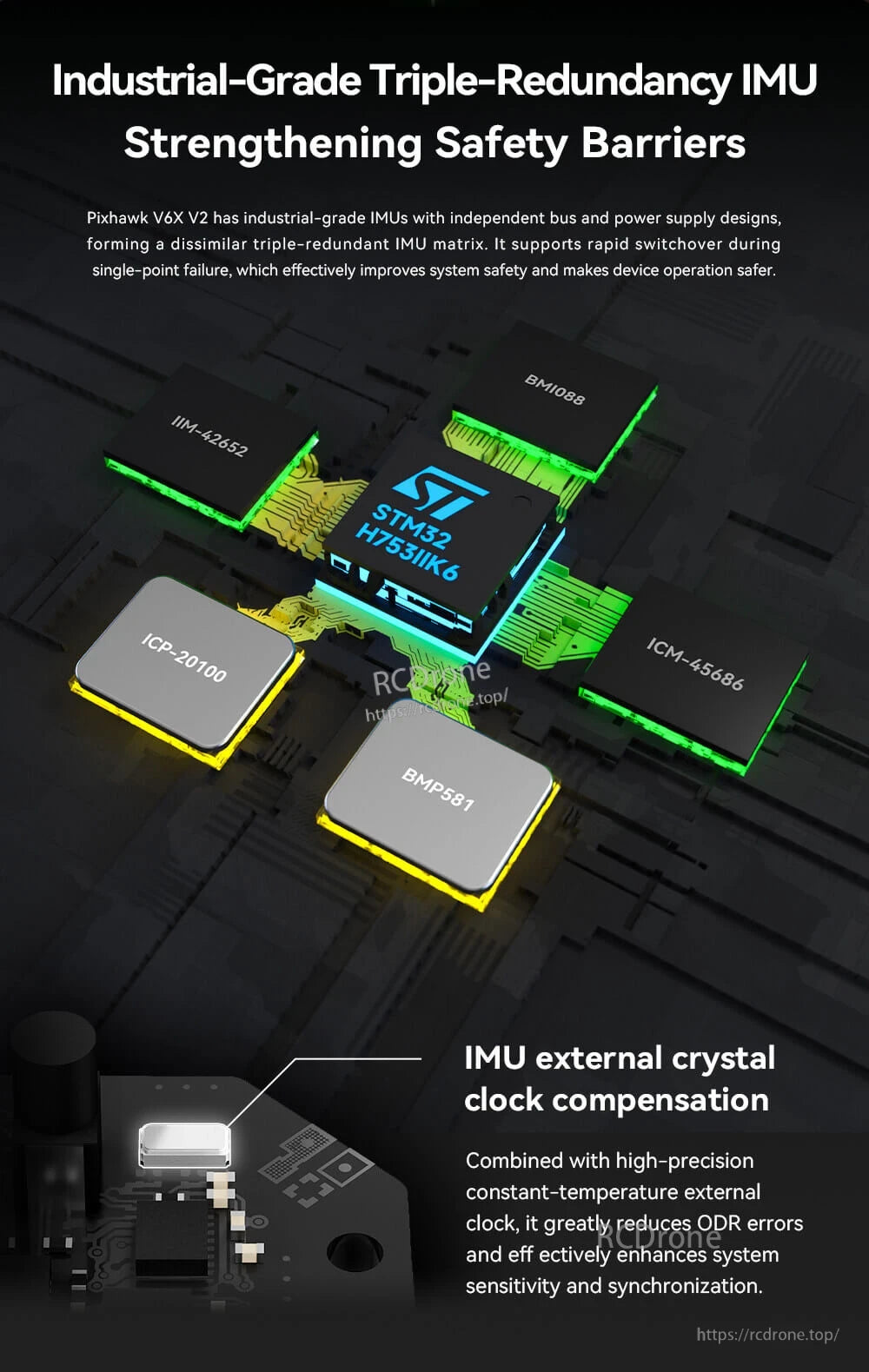
Het ontwerp van de Pixhawk V6X V2 vluchtcontroller heeft een drievoudig redundante IMU-configuratie rond de STM32H753IIK6, plus externe kristalklokcompensatie voor sensor-timing.

De Pixhawk V6X V2 integreert een automotive-grade RM3100-magnetometer en ondersteunt GPS-richtingbepaling voor een stabielere oriëntatie en navigatie.
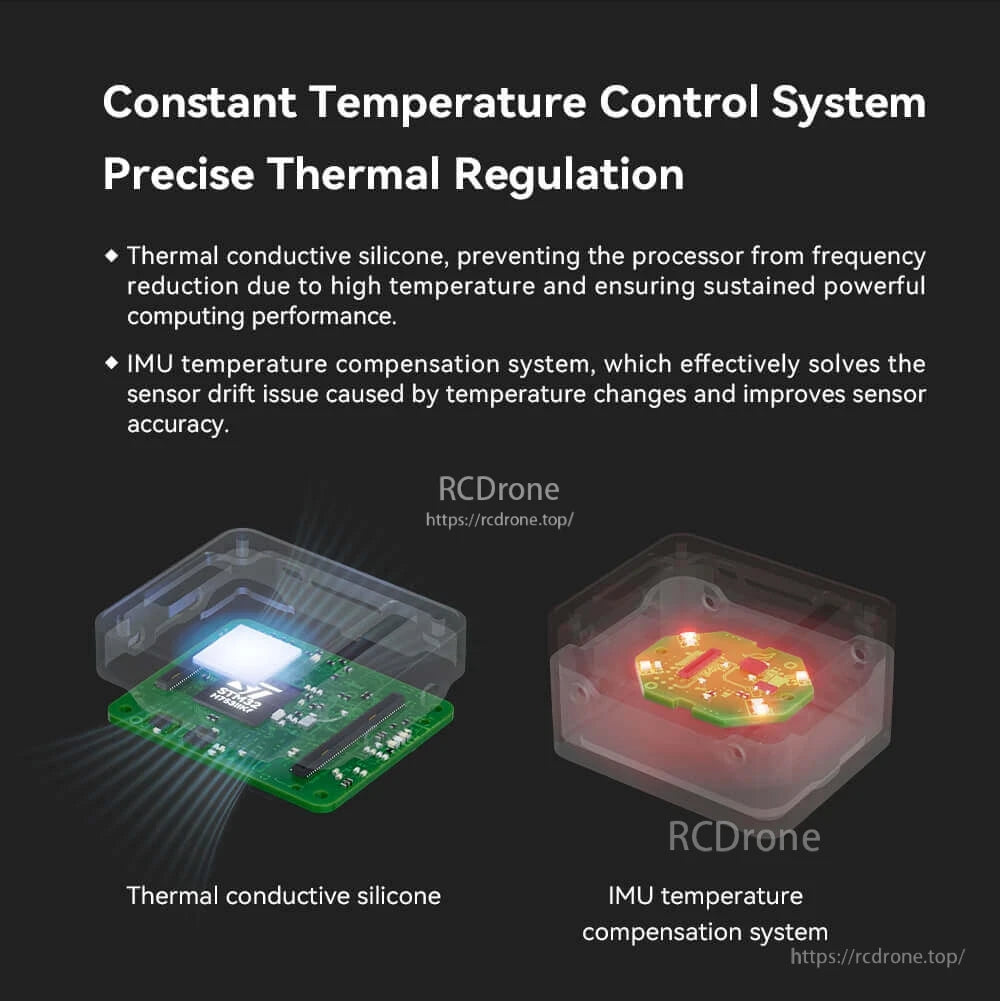
Een constant temperatuurcontrolesysteem maakt gebruik van thermisch geleidende silicone en IMU-temperatuurcompensatie om temperatuurgerelateerde drift te verminderen.
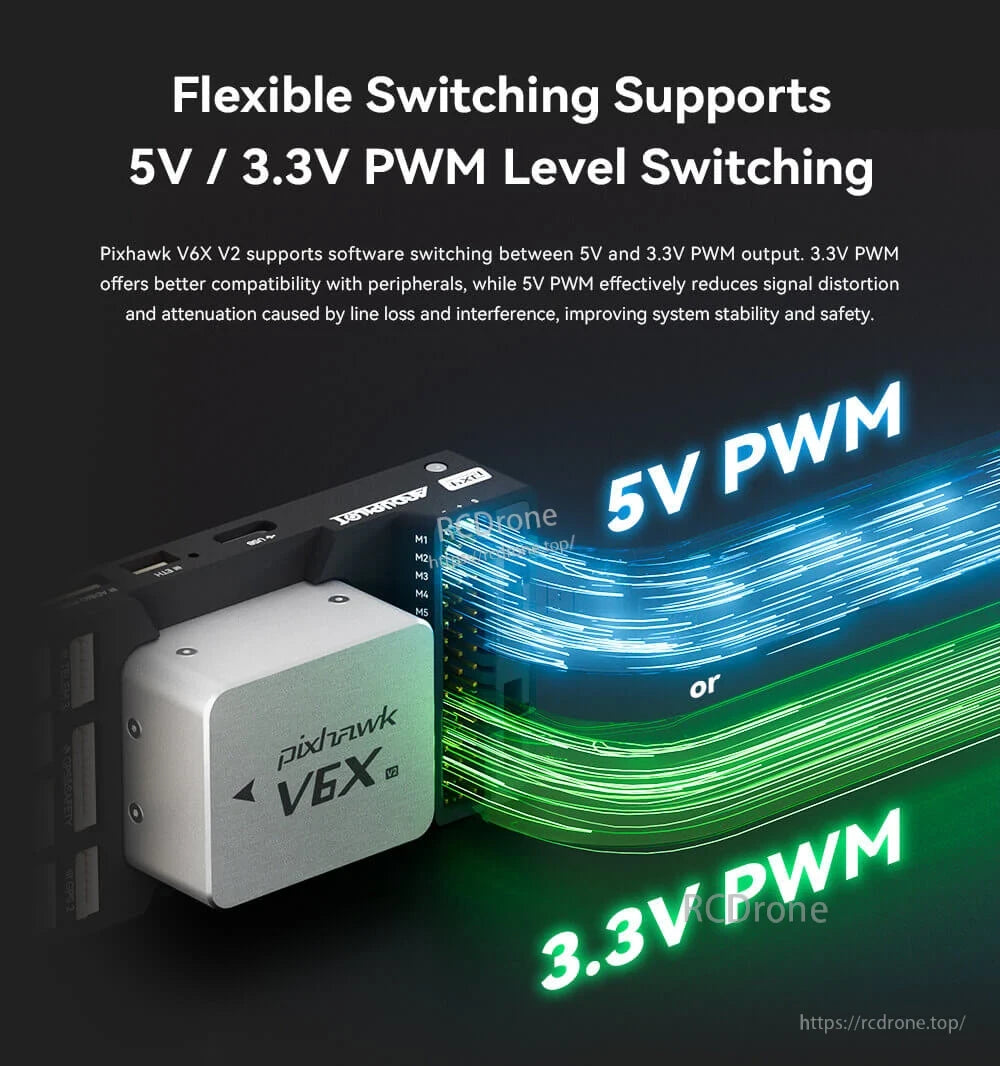
Pixhawk V6X V2 ondersteunt flexibele schakeling tussen 5V en 3.3V PWM-uitgangsniveaus voor eenvoudigere compatibiliteit met verschillende randapparatuur.

Pixhawk V6X V2 integreert een 100 Mbps Ethernet-interface naast gelabelde poorten zoals USB, TELEM3, CAN en GPS & Veiligheid voor een nette bekabeling.
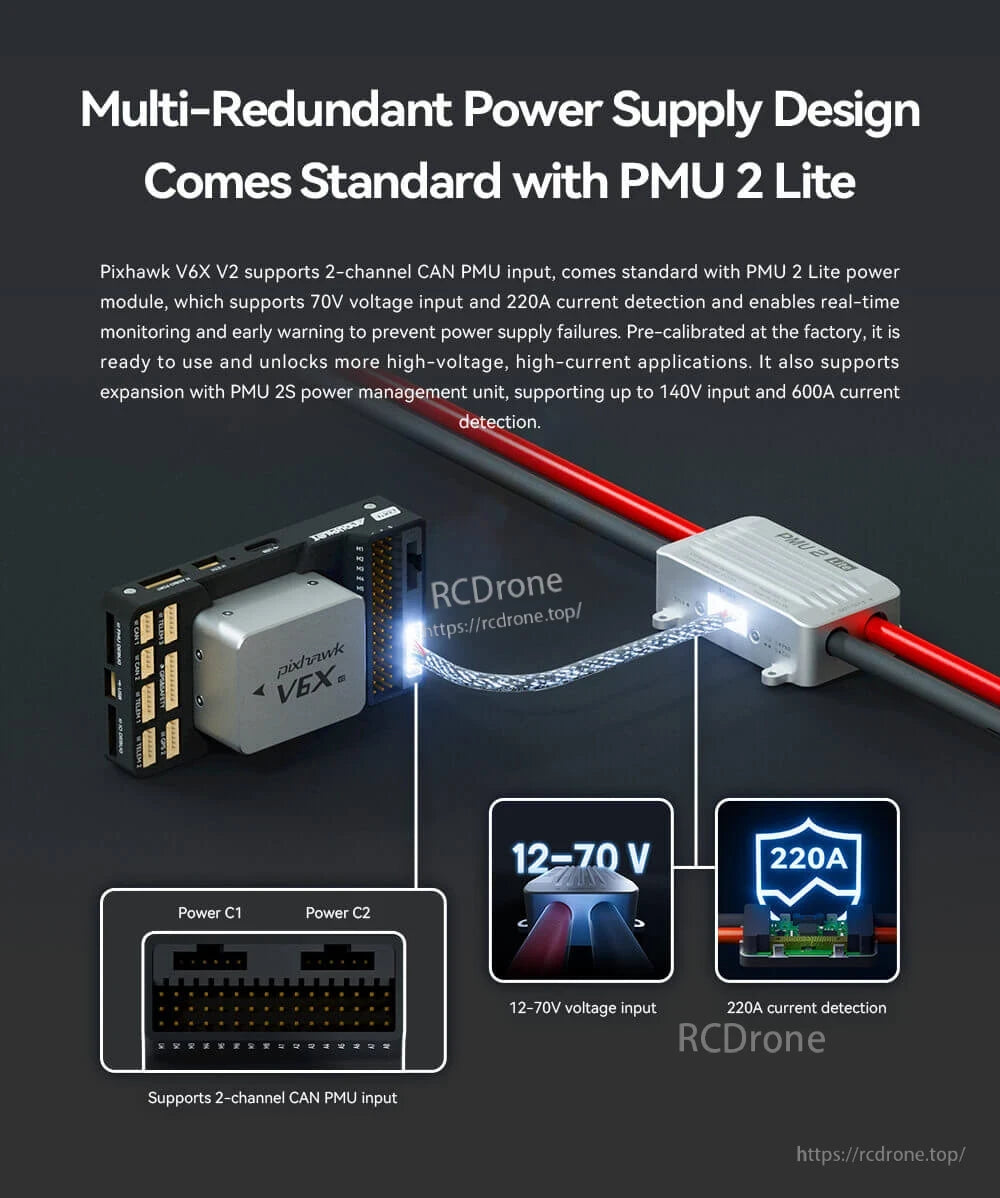
Pixhawk V6X V2 wordt geleverd met de PMU 2 Lite-module voor multi-redundante stroominvoer, ondersteunt 12–70V en 220A stroomdetectie.

De CUAV Pixhawk V6X V2 maakt gebruik van een modulaire, afneembare kernmodule op een draagbord om de aanpassing en toegang tot connectoren te vereenvoudigen.
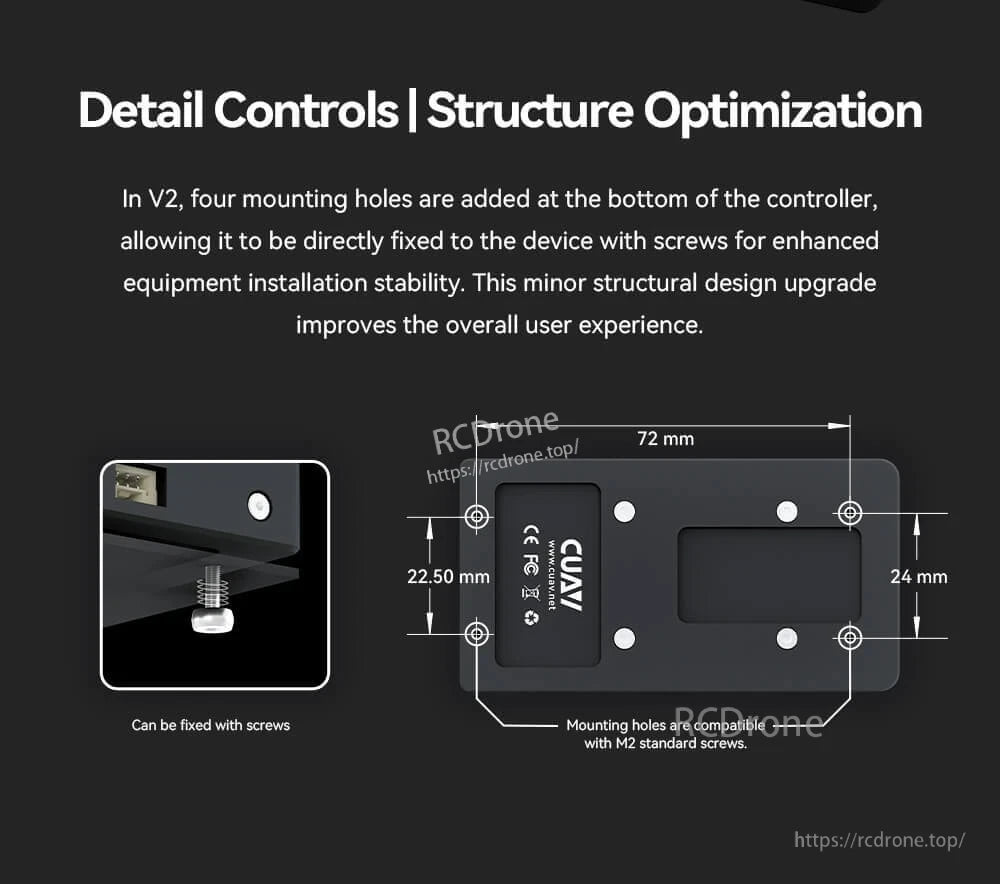
De CUAV Pixhawk V6X V2 voegt vier M2-compatibele montagegaten aan de onderkant toe met een voetafdruk van 72 mm voor een veiligere schroefinstallatie.

De Pixhawk V6X V2 ondersteunt ArduPilot en PX4 firmware voor een scala aan onbemande platforms, waaronder multirotors, vaste-vleugel vliegtuigen en grond- of maritieme voertuigen.
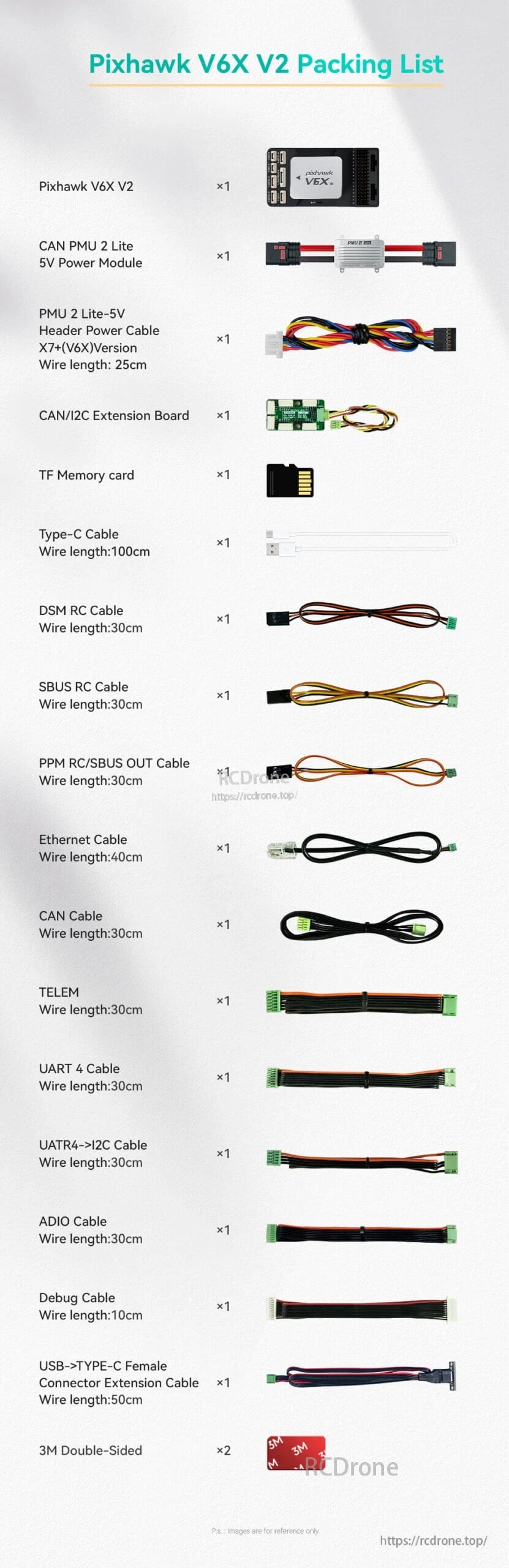
De Pixhawk V6X V2 kit bevat de vluchtcontroller, CAN PMU 2 Lite 5V voedingsmodule, TF-geheugenkaart en een set van Type‑C, RC, Ethernet, CAN, TELEM, UART, ADIO en debugkabels.
Related Collections


















