




DFRobot SEN0142 MPU6050 6 DOF Gyroscoop Versnellingsmeter IMU Module met I2C Digitale Bewegingsprocessor voor Arduino & Robotica
DFRobot SEN0142 MPU6050 6 DOF Gyroscoop Versnellingsmeter IMU Module met I2C Digitale Bewegingsprocessor voor Arduino & Robotica
DFRobot
Kan beschikbaarheid voor afhalen niet laden
Overzicht
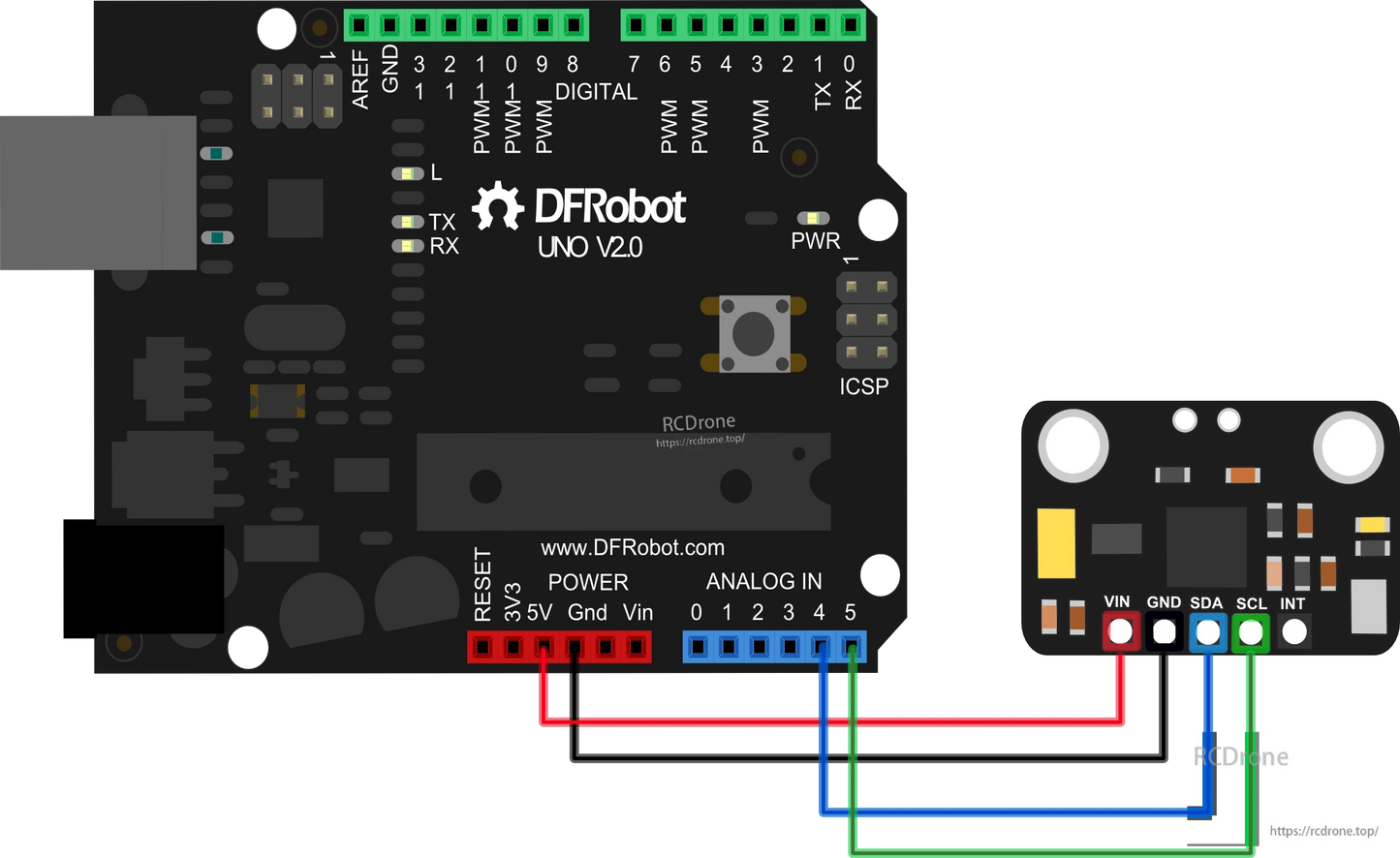
De DFRobot SEN0142 MPU6050 6 DOF IMU-module integreert een 3-assige gyroscoop en 3-assige versnellingsmeter op een enkele chip, wat nauwkeurige bewegingsdetectie biedt voor robotica, drones, draagbare apparaten en Arduino-projecten. Met een Digitale Bewegingsprocessor (DMP) ondersteunt het geavanceerde 6-assige en 9-assige MotionFusion-algoritmen, waardoor quaternion-, Euler-hoek- en ruwe sensorgegevensuitvoer mogelijk zijn. Met een breed ingangsvoltagebereik van 3V–5V kan de MPU6050 direct worden aangesloten op Arduino en andere microcontrollers voor realtime bewegingstracking en gebarenherkenning.
Belangrijkste Kenmerken
-
Combineert 3-assige gyroscoop en 3-assige versnellingsmeter in één chip
-
Programmeersysteem voor versnellingsmeter bereik: ±2g, ±4g, ±8g, ±16g
-
Gyroscoop gevoeligheid: ±250, ±500, ±1000, ±2000 dps
-
Digitale Bewegingsprocessor (DMP) voor on-board MotionFusion en gebarenherkenning
-
I2C digitale interface ondersteunt matrix, quaternion, Euler, en ruwe gegevensformaten
-
Ingebouwde bias & kompas calibratie voor verbeterde nauwkeurigheid
-
Compatibel met Arduino en draagbare elektronica via I2Cdevlib
Specificaties
-
Werkspanning: 3–5 V
Output: I2C digitaal (6/9-assige MotionFusion gegevens)
-
Versnellingsmeter: ±2g / ±4g / ±8g / ±16g programmeerbaar bereik
-
Gyroscoop: ±250 / ±500 / ±1000 / ±2000 dps gevoeligheid
-
Gegevensformaat: Rotatiematrix, quaternion, Euler-hoek, ruwe gegevens
-
Afmetingen: 14 × 21 mm
Toepassingen
-
Robotica bewegingsdetectie
-
Arduino &en DIY elektronica projecten
-
Mensen-computer interactie (HCI)
-
Draagbare apparaten en gebarenbediening
-
Navigatie- en balanceringssystemen (e.g., Segway-achtige transportmiddelen)
-
Drone stabilisatie en bewegingsdetectie
Details



Voorbeeldcode
Download alstublieft de bibliotheken voor alle IMU-sensoren eerst!




- Een selectie kiezen resulteert in het geheel verversen van de pagina.
- Opent in een nieuw venster.