F450-4B Raspberry Pi programmeerbare drone-ontwikkelingskit - Pixhawk DIY Ardupilot industriële open source drone-platforms
F450-4B Raspberry Pi programmeerbare drone-ontwikkelingskit - Pixhawk DIY Ardupilot industriële open source drone-platforms
RCDrone
Kan beschikbaarheid voor afhalen niet laden
Overzicht
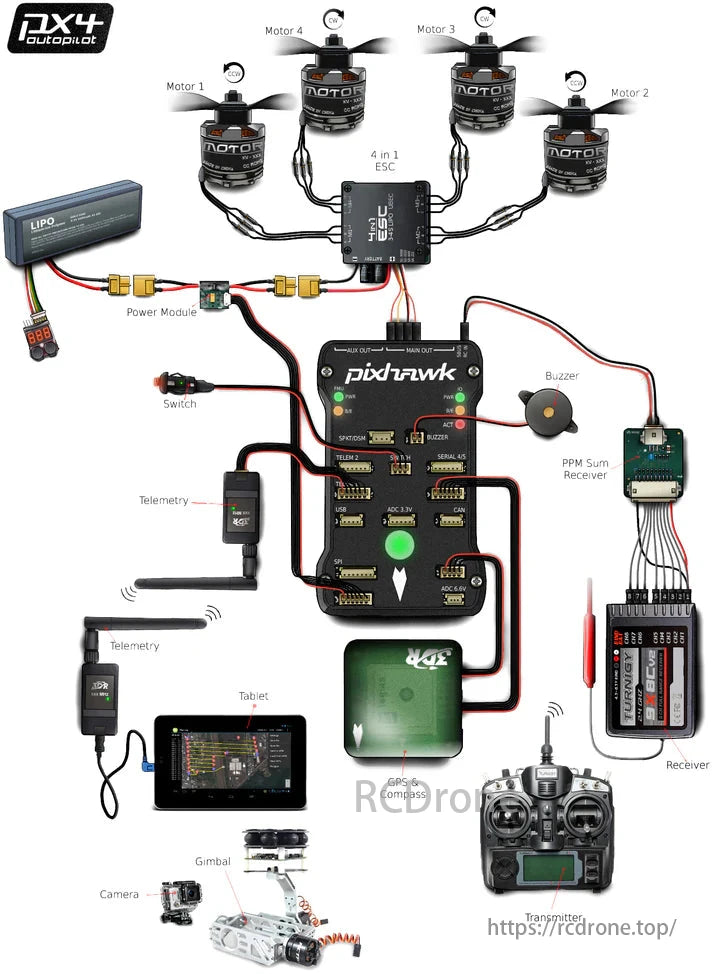
De F450-4B Raspberry Pi-drone is een geavanceerde Zelfgemaakte drone-kit die een krachtige combineert Framboos Pi 4B boordcomputer met de veelzijdige Pixhawk 2.4.8 vluchtcontrollerwaardoor het een zeer aanpasbare en programmeerbare drone platform. Dit Open-source droneplatform ondersteunt geavanceerde tools zoals Dronekit-python, waardoor ontwikkelaars autonome missies, realtime gegevensoverdracht en AI-gestuurde beeldverwerkingstoepassingen kunnen maken. Met een robuust 450mm frame, een 200MP HD-camera, een 3S 5200mAh-batterij voor maximaal 20 minuten vliegen en geavanceerde vluchtmodi zoals hoogtebehoud, terugkeer naar huis en cirkelmodus, is de F450 Drone Kit de ideale keuze voor liefhebbers, onderzoekers en docenten die op zoek zijn naar een innovatieve drone-ontwikkelingservaring.
Belangrijkste kenmerken
Hoogwaardige hardware
- Framboos Pi 4B: Aangedreven door een 64-bits 1,5GHz quad-coreprocessor, die 4K-video-uitvoer en supersnelle WiFi-communicatie ondersteunt voor betrouwbare werking.
- Pixhawk 2.4.8 Vluchtcontroller: Uitgerust met meerdere geïntegreerde sensoren, voor nauwkeurige positieregeling, zweefvluchten en missieplanning.
- Ondersteuning voor uitbreiding van visie: In combinatie met een monoculaire camera en OpenCV-tools voldoet deze kit aan de behoeften voor realtime beeldoverdracht en -verwerking.
Verschillende vluchtmodi
- Hoogte vasthouden (AltHold): Handhaaft een stabiele vlieghoogte.
- Zweven: Zorgt voor nauwkeurige, stationaire zweefbeweging.
- Terug naar Home (Terug): Keert automatisch terug naar het startpunt bij signaalverlies of een bijna lege batterij.
- Landing (Land): Voert een soepele autonome landing uit.
- Stabilisatiemodus: Past de vlieghouding automatisch aan.
- Cirkelmodus: Voert cirkelvormige vluchten uit rond een doel.
- Hoofdloze modus: Verwijdert richtingsbeperkingen voor eenvoudigere controle.
- Buiten controle terugkeer: Keert terug naar een vooraf ingestelde locatie wanneer het signaal verloren gaat.
- Landing met laag vermogen: Landt veilig bij een lage batterijspanning.
Gegevensoverdracht en beeldverwerking
- Creëert een lokaal WiFi-netwerk via een ingebouwde hotspot zonder dat er externe routers nodig zijn, waardoor realtime gegevens- en beeldoverdracht mogelijk is.
- Ondersteunt OpenCV-gebaseerde videostreaming en -analyse, ideaal voor beeldbewaking en intelligente toepassingen.
Specificaties
Drone-parameters
| Parameter | Details |
|---|---|
| Naam | F450 Drone-kit |
| Wielbasis | 450mm |
| Gewicht | 1493g (met batterij en Raspberry Pi 4B) |
| Vluchtcontroller | Pixhawk 2.4.8 open-source vluchtcontroller |
| Boordcomputer | Framboos Pi 4B |
| Camera | 200MP HD 1080P |
| Zwevende ondersteuning | Optische stroommodule en laserafstandssensor |
| GPS-module | m8n-GPS |
| Vluchttijd | ~20 minuten (afhankelijk van de omgeving en de missie) |
| Batterij | 3S 5200mAh (11,1V) |
| Laadvermogen | 500 gram |
| Windweerstand | Niveau 3-4 |
| Motor | ZonnigSky A2212 |
| ESC | Hobbywing 20A ESC (ondersteunt 3S-4S LiPo-batterijen) |
| Schroeven | T1045 zelfblokkerende propellers |
| Maximale hoogte | 2000m (storingsvrij) |
| Vliegbereik | 1000m |
| Vluchtscenario's | Binnen / Buiten |
Specificaties Pixhawk 2.4.8-vluchtcontroller
- Verwerker: 32-bits ARM STM32F427 Cortex M4, 168 MHz, 256 KB RAM
- Sensoren:
- L3GD20 3-assige 6DOF gyroscoop
- LSM303D 3-assige 14-bits accelerometer/magnetometer
- MPU6000 6-assige accelerometer/magnetometer
- MS5611 hoge precisie barometer
- Compatibiliteit met grondbediening: QGroundControl, MissiePlanner
- Afmetingen: 81mm x 47mm x 16mm; Gewicht: 37g
Raspberry Pi 4B-specificaties
- Chipset:Broadcom BCM2711
- CPU: 64-bits 1,5GHz quad-core
- GPU: 500MHz VideoCore VI
- RAM: 4 GB DDR4
- Interfaces: 2x USB 3.0, 2x USB 2.0
- Video-uitgang: Dubbele micro-HDMI-poorten, ondersteunt 4K@60Hz
- Mededeling: Bluetooth 5.0, WiFi 5 (2,4/5 GHz)
- Stroomvoorziening: USB Type-C (5V 3A)
Pakket omvat
Configuratie 1: SunnySky A2212-motor met FlySky i6-afstandsbediening en telemetrie
- F450-frame met landingsgestel
- SunnySky A2212 motoren (4 stuks)
- Hobbywing 20A ESC's (4 stuks)
- T1045 zelfblokkerende propellers (4 paar)
- PIX M8n GPS-module
- Trillingsdempende plaat
- FlySky i6 afstandsbediening
- 3S 5200mAh-batterij
- B3 balanslader
- GPS-houder
- FS-spannings-telemetriemodule

Inbegrepen: Batterijriemen, nylon kabelbinders, houten pads, 3M plakband, zoemer, installatiegereedschap
Montage- en debugvideo's, bijbehorende materialen beschikbaar; neem contact op met de klantenservice voor de broncode.
Configuratie 2: SunnySky A2212-motor met Radiolink PRO
- F450-frame met landingsgestel
- SunnySky A2212 motoren (4 stuks)
- Hobbywing 20A ESC's (4 stuks)
- 9450 zelfblokkerende propellers (3 paar)
- Foto's.M8n GPS-modulekit
- Trillingsdempende plaat
- Radiolink PRO (R9DS-ontvanger)
- 3S 2200mAh controlebatterij
- 3S 5200mAh-batterij
- B3 balanslader
- GPS-houder

Inbegrepen: Batterijriemen, nylon kabelbinders, houten pads, 3M plakband, zoemer, installatiegereedschap
Montage- en debugvideo's, bijbehorende materialen beschikbaar; neem contact op met de klantenservice voor de broncode.
Montage van de F450 Drone Kit
Toepassingsscenario's
De F450-4B Drone Development Kit is ideaal voor:
- Drone-onderzoek en -ontwikkeling: Universitair onderzoek, testen van vluchtcontrollers, ontwikkeling van algoritmen.
- Intelligente toepassingen: Routeplanning, doelherkenning en obstakelvermijding.
- Educatieve experimenten: Programmeren, hardware-assemblage en debuggen.
- Veldgebruik: Binnenzweven, buitenmetingen, landbouwmonitoring en meer.
Details
F450-4B Raspberry Pi Drone-ontwikkelingsplatform
De F450 is een klassiek en veelgebruikt dronemodel. De montage is eenvoudig, de prijs is hoog, de gebruiksvriendelijkheid is uitstekend en beginners kunnen er snel mee aan de slag.

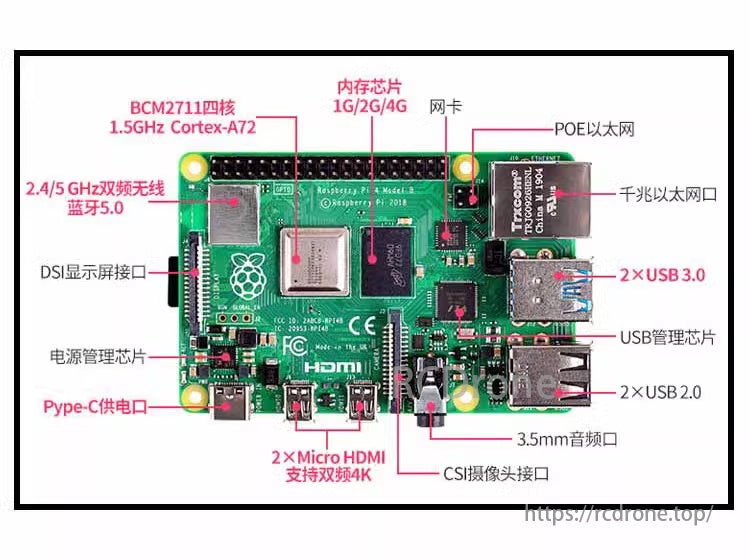
Geüpgradede Raspberry Pi 4B
De hardwarematige verwerkingskracht van de Raspberry Pi 4B is aanzienlijk krachtiger dan die van de 3B+.
De Raspberry Pi is uitgerust met het nieuwste open-source systeem Ubuntu 20.04, wat een soepelere ervaring biedt vergeleken met het Ubuntu Mate-systeem.

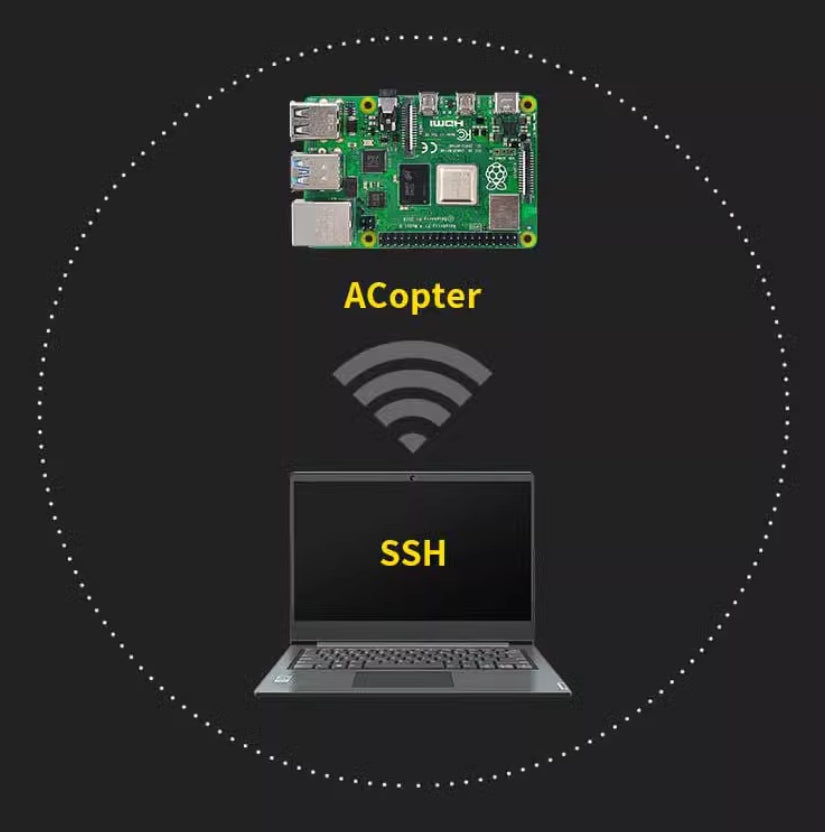
Systeem ingeschakelde WiFi-hotspot (Acopter)
Met behulp van de WiFi-mogelijkheid van de Raspberry Pi 4B wordt een zelfgebouwde hotspot (Acopter) gemaakt. De pc kan rechtstreeks verbinding maken met de WiFi-hotspot van de 4B om een lokaal netwerk te vormen en SSH-opdrachten gebruiken voor externe toegang tot de Raspberry Pi. In tegenstelling tot het 3B+-model dat een router nodig heeft voor netwerkconfiguratie, is deze opstelling veel eenvoudiger en gebruiksvriendelijker voor beginners.
OpenCV Visuele Verwerking
Er wordt een monoculaire camera toegevoegd, die beeldoverdracht en nabewerking mogelijk maakt. Videostreams kunnen worden vastgelegd via de Raspberry Pi en verwerkt met behulp van tools zoals OpenCV. Realtime HD-videostreams kunnen ook worden teruggestuurd naar een pc voor verwerking of naar een mobiel apparaat voor weergave.

Meer uitbreidingsinterface
De Raspberry Pi 4B biedt een breed scala aan uitbreidingsinterfaces, waaronder twee USB 3.0-poorten, twee 4K micro HDMI-poorten, CSI- en DSI-interfaces, gigabit Ethernet en een Type-C-voeding, wat zorgt voor uitzonderlijke veelzijdigheid voor verschillende toepassingen.
Single Camera-editie
De single camera edition bevat een Raspberry Pi 4B en een monoculaire camera, die communicatie via een seriële poort met de flight controller mogelijk maakt. Het ondersteunt taken zoals visuele verwerking, Python-programmering en communicatie. Deze versie is geschikt voor gebruikers met eerdere ervaring met Pixhawk, basiskennis van Ubuntu (Linux), OpenCV, Raspberry Pi en communicatie via een lokaal netwerk.
Naast de basisfuncties ondersteunt de single camera-editie beeld- en gegevensoverdracht via wifi en maakt het mogelijk om de drone te besturen via Dronekit-python programmeren.

Optische stroompositionering
Binnen zweefbesturing met Dronekit-python onder optische stroompositioneringsomstandigheden

Dit drone-ontwikkelingsplatform ondersteunt ROS, Python-programmering, OpenCV-beeldherkenning, 4G-transmissie over lange afstanden, En Aruco 2D-code visueel geleide landingwaardoor het zeer veelzijdig en innovatief is.

FlySky i6 afstandsbediening
Uitgerust met een ia6b-ontvanger met 10-kanaals firmware, een spanningstelemetriemodule en een afstandsbedieningsbereik van meer dan 1000 m, ideaal voor beginners om te leren en te oefenen.

Radiolink AT9S afstandsbediening
Beschikt over 10 kanalen met een regelbereik van meer dan 2000 m. Uitgerust met een telemetriemodule die gegevens levert over batterijspanning, GPS-satelliettelling, vluchthoogte, coördinaten, vluchtmodus en meer.

Veelgestelde vragen
1. Kan ik secundaire ontwikkeling uitvoeren? Kan ik zelfstandig programmeren?
Het antwoord is ja. Zoals eerder geïntroduceerd, is Ardupilot momenteel het meest gebruikte open-source vluchtcontrolesysteem, en veel uitstekende binnenlandse en internationale dronemodellen worden ontwikkeld op basis van dit systeem.
De secundaire ontwikkeling kent hoofdzakelijk twee richtingen: de ontwikkeling van de vluchtbesturing en de externe uitbreiding.
- Ontwikkeling van vluchtbesturing
Wij gebruiken Ardupilot, dus het leren van opensource-ontwikkeling voor vluchtbesturing houdt voornamelijk in dat je het opensourceproject Ardupilot bestudeert.
- Er zijn sterke programmeervaardigheden vereist (de broncode is in C++), evenals kennis van geavanceerde wiskunde (discrete wiskunde, iteratie, linearisatie), Kalman-filtering en embedded development.
- Een solide theoretische basis is nodig. Dit bereidt je voor op het werken aan onbemande systeemontwikkeling en vluchtbesturing R&D.
Als u zich wilt richten op de ontwikkeling van vluchtbesturing, moet u het meeste werk op uw computer doen:
- Het opzetten van de programmeeromgeving, het downloaden van de broncode voor de vluchtbesturing, het bestuderen van de architectuur en functionele modules, etc.
- Zodra u bekend bent met het codeframework, kunt u beginnen met programmeren op basis van de bestaande code.
Begin met een basismodel voor vluchtbesturing en raadpleeg het Ardupilot-vluchtbesturingsboek dat we u ter ondersteuning aanbieden.
- Ontwikkeling van externe uitbreiding
Met externe uitbreiding kunt u externe apparaten toevoegen op basis van uw taken en scenario's via de gereserveerde interfaces van de vluchtcontroller. Bijvoorbeeld:
- Voeg een optische stroommodule toe voor positionering en zweven binnenshuis.
- Voeg een laserradar toe om obstakels te ontwijken.
- Gebruik telemetrie om autonome vluchten en routeplanning mogelijk te maken.
- Installeer een boordcomputer (bijvoorbeeld Raspberry Pi) en gebruik Dronekit-Python of ROS om de drone te programmeren en te besturen.
Het doel van het toevoegen van een boordcomputer is om complexere taken uit te kunnen voeren, zoals:
- Gebruik de Raspberry Pi-camera voor visuele herkenning (vereist OpenCV, YOLO, enz.).
- Communicatieprotocollen combineren om de vlucht van de drone te besturen.
- Het verzenden van vluchtgegevens of high-definition video's via netwerken.
Deze functies kunnen niet alleen worden gerealiseerd door te vertrouwen op de vluchtcontroller.
Bij het bestuderen van externe expansie ligt de nadruk vooral op toepassingen. Dat is ook de richting van de meeste landelijke competities.Nadat u de kennis heeft opgedaan, kunt u de belangrijkste aspecten van intelligente drones verkennen, zoals visuele herkenning, AI-integratie met drones en meer.
2. Wat zijn de voorwaarden voor onafhankelijke ontwikkeling?
Leren over drones is een geleidelijk proces. Dronesystemen zijn interdisciplinair en integratief, en omvatten een breed scala aan kennisgebieden. Om droneontwikkeling te leren, zijn de volgende fundamenten vereist:
- Basisvaardigheden, zoals het gebruik van soldeerbouten, verschillende schroevendraaiers en andere gereedschappen.
- Basiskennis van elektronica: begrippen zoals spanning, stroom, vermogen, polariteit en signalen.
- Basiskennis van automatiseringsregeling: PID-regeling, feedback, digitale signalen, analoge signalen, etc.
- Basisvaardigheden computergebruik: drivers, seriële poorten, baudrates, firmwareversies, softwareversies.
- Basiskennis van Pixhawk-drones.
- Basiskennis van het besturingssysteem Ubuntu.
- Kennis van programmeertalen, zoals C++ en Python.
Hoe maak je een Respberry PI Drone?
Related Collections