ST-3046-C001 is een 6V 40kg seriële bus slimme servo, adopteert een volledig aluminium behuizing, kernloze motor, stalen versnellingsbak, kernloze motor, Feetech heeft zelf de TTL-besturingskaart onderzocht en ontwikkeld, 12 bit magnetische coderingssensor met hoge precisie. Het blokkeerkoppel is 40kg.cm, kan feedback geven over positie, snelheid, spanning, stroom, temperatuur, belastingsparameters, waardoor overbelastings- en overstroombeveiliging kan worden gerealiseerd. Het is geschikt voor toepassing in toepassingsscenario's van industriële apparatuur, robots en transmissies.
SKU:STS3046
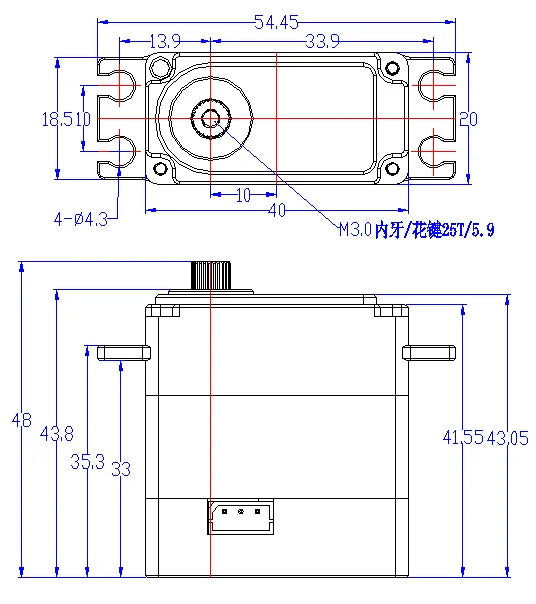
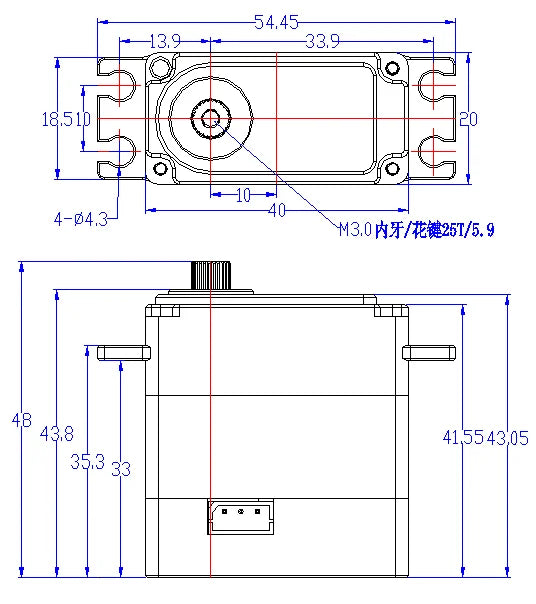
Productnaam: 7,4V 40KG.CM Kunststof behuizing Metalen tandwiel Magnetische encoder Enkele as TTL Seriële busservo
Uiterlijkgrootte: 45,2 x 24,7 x 35 mm (zie de blauwdruk)
Stall Torque:[email protected]
Stal Speed:[email protected]
Feedback: belasting / positie / snelheid / spanning / stroom / temperatuur
Elektronische beveiliging: oververhitting / overstroom / overspanning / overbelastingsbeveiliging




Structurele kenmerken:
De schaal gebruikt een technische plastic schaal met een hogere sterkte, Optimaliseert de middenafstand, Compactere algehele structuur, Het servotandwiel gebruikt 1:345 koperen tandwielcombinatie, hoger koppel, Met hetzelfde koppel ,Vergelijk met de standaard servogrootte,Het ziet er lager uit (5 mm),Het lichaam heeft een structuur met dubbele as,De structurele kenmerken van de cirkelvormige vaste stof,Bedradingsmodus van dubbele uitgaande kabels met metalen hoofdservohoorns,Het is geschikt voor toepassing in viervoetige robot, slangenrobot, desktoprobot, humanoïde robot en mechanische arm.
Elektronische besturingsfunctie:
1. Acceleratie start-stop-functie: snelheid en acceleratiewaarde kunnen worden ingesteld, het bewegingseffect is zachter.
2.Hoge precisie, 360 graden absolute positie 4096 bit precisie, de hoogste positieresolutie is 0,088 graden, als de besturing 90 graden is, invoer 4096/360 * 90 = 1024, als de besturing 180 graden is, invoer 4096/360 * 180 = 2048 , om te berekenen.
3. Er zijn vier werkmodusschakelingen (modus 0 positieservo, modus 1 snelheid gesloten lus, modus 2 snelheid open lus, modus 3 stappenservo).
t7505>1)、Modus 0: Locatiemodus, de standaardmodus. In deze modus kan een absolute hoekcontrole van 360 graden worden gerealiseerd. Ondersteuning van versnellingsbeweging.
2)、Modus 1: Snelheid met gesloten lus, in de programmeerinterface is de bedieningsmodus ingesteld op 1, schakel over naar de snelheidsmodus met gesloten lus en voer de overeenkomstige snelheid in de snelheidskolom in om te draaien .
3)、Modus 2: Snelheid met open lus, in de programmeerinterface is de bedrijfsmodus ingesteld op 2, schakel over naar de snelheid met open lus en voer de overeenkomstige tijd in de tijdkolom in die moet worden uitgevoerd.
4)、Modus3:Stapmodus: in de programmeerinterface is de maximale/minimale hoeklimiet ingesteld op 0, en de bedieningsmodus is ingesteld op 3. Schakel over naar stapmodus. Voer de positie in de positiebalk in om naar de doelpositie te stappen. Klik nogmaals op de positie om in dezelfde richting te blijven stappen.
4. Multi-turn-modus, 360 graden absolute controle en feedback, met de hoogste nauwkeurigheid kan de absolute positiecontrole plus of min 7 slagen zijn, maar het aantal stroomcycli wordt niet opgeslagen, alleen de absolute positiefeedbackwaarde blijft behouden.
5、Kalibratie met één toets, installatie onder een hoek van 360 graden op elke positie, (40 (decimaal) adresinvoer 128 (decimaal)) één sleutelcorrectie huidige positie is het midden (2048 (decimaal)).
6、TTL-communicatieniveau, half-duplex asynchrone communicatie, busprotocolondersteuning om lees- en schrijfparameters aan te passen, en synchrone leesfunctie toe te voegen (stuur een instructie om de terugleesinstructie van elke servo op de bus beurtelings te ontvangen.)
7、Meerdere beveiligingen, (overbelasting, overstroom, overspanning, oververhitting, schakelaarinstelling, wijziging van conditieparameters)
1) 、 Overbelastingsbeveiliging: door positiedetectie, tijdens de beweging van de startpositie naar de doelpositie, wanneer wordt gedetecteerd dat de huidige positie niet de doelpositie is na het tegenkomen van obstakels, duurt de loskracht 2S (20% van de standaardblokkeerkracht). Totdat een nieuw commando wordt geactiveerd, Beveiliging vrijgeven
2)、Overstroombeveiliging: controleer via de ingestelde stroomwaarde of de stroom de ingestelde stroomwaarde bereikt. Wanneer de ingestelde stroomwaarde wordt bereikt, laat u de kracht los (het standaardkoppel is 0). Totdat een nieuw commando wordt geactiveerd, Beveiliging vrijgeven
3)、Overspanningsbeveiliging: detecteert de huidige spanningswaarde. Als deze de ingestelde spanningswaarde overschrijdt, geeft het alarm overspanning weer.
4)、Oververhittingsbeveiliging: detecteert de huidige motortemperatuur. Als de temperatuur de ingestelde waarde overschrijdt, geeft het alarm oververhitting weer.
8:Meerdere feedback:
1)Belastingfeedback: de huidige besturingsuitgang stuurt de spanningscyclus van de motor aan, en de volledige schaal is 1000 = 100% koppeluitvoer.
2)Huidige feedback: de servowerkstroom, 1 = 6,5mA
3)Spanningsfeedback: de servowerkspanning,70=7V,0,1V
4)Temperatuurfeedback: interne werktemperatuur van de huidige servo (temperatuur meten).
5)Snelheidsfeedback: feedback van de snelheid van de huidige motorrotatie en het aantal stappen in tijdseenheid (per seconde)

Onze diensten: Wij bieden one-stop-oplossingen op maat voor Original Design Manufacturing (ODM) en Original Equipment Manufacturing (OEM). Onze mogelijkheden omvatten elektronisch ontwerp, structureel ontwerp en productie.Daarnaast bieden we maatwerkdiensten voor producten zoals servo's met functies zoals PWM, RS485, 3V-24v-bediening en 0-360° feedbackwielbediening.
Gespecialiseerd in ODM en OEM en op maat gemaakt 1.Uw logo-etiket of print
2.Servodraad
3.Verpakking: PE-zak, kleurendoos, plastic doos wity
uw logo
4.Kabelconnector
5.Aangepaste servo met verschillende brede werkspanning
9、Open PID-parameters.
Onze producten zijn CE- en ROHS-gecertificeerd en de meeste van hen hebben patenten op het uiterlijk en gebruiksmodellen aangevraagd
Onze producten zijn gecertificeerd door 'CE', 'RoHS' en 'REACH'. Daarnaast beschikken we over uiterlijk- en modeloctrooien voor onze ontwerpen.