







Feetech STS3215 - 7.4V 20KG 360 ° 25T Magnetische encoder Seriële bus Servo Multi-turn servo Hoge precisie Stap-modus servo
Feetech STS3215 - 7.4V 20KG 360 ° 25T Magnetische encoder Seriële bus Servo Multi-turn servo Hoge precisie Stap-modus servo
Feetech
Kan beschikbaarheid voor afhalen niet laden
Feetech STS3215 - 7.SPECIFICATIES VAN 4V 20KG 360° servo
Merknaam: Feetech
Herkomst: Vasteland van China
Materiaal: Kunststof
Plastic type: PC
RC-onderdelen en -accessoires: Batterijen - LiPo
Grootte: 10*10*10
Voor voertuigtype: Auto's
Gebruik: Voertuigen en speelgoed met afstandsbediening
Onderdelen/accessoires upgraden: Lithiumbatterij
Afstandsbediening Randapparatuur/Apparaten: Afstandsbediening
Gereedschapsbenodigdheden: Batterij
Aantal: 1 stuks
Technische parameters: KV1100
Modelnummer: STS3215
Kenmerken van vierwielaandrijving: Motoren
Wielbasis: Schroeven
Modelnummer: STS3215
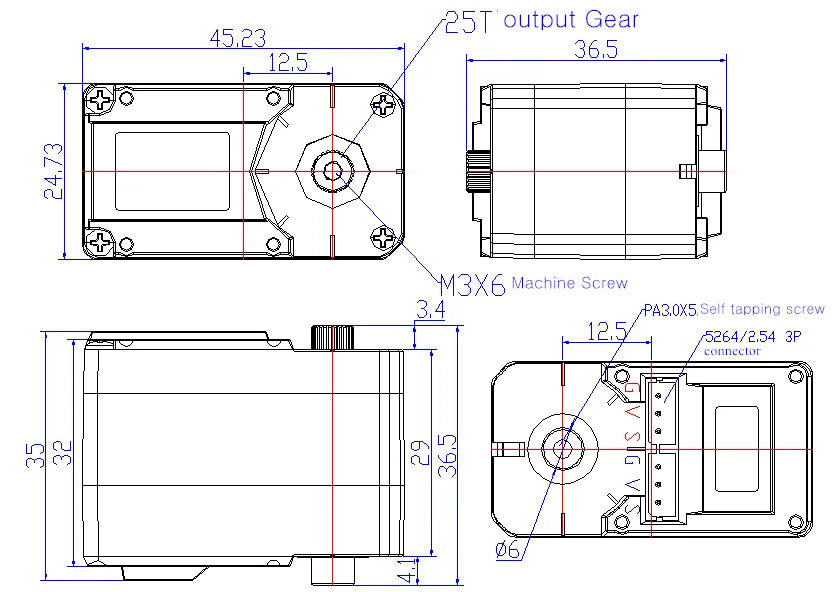
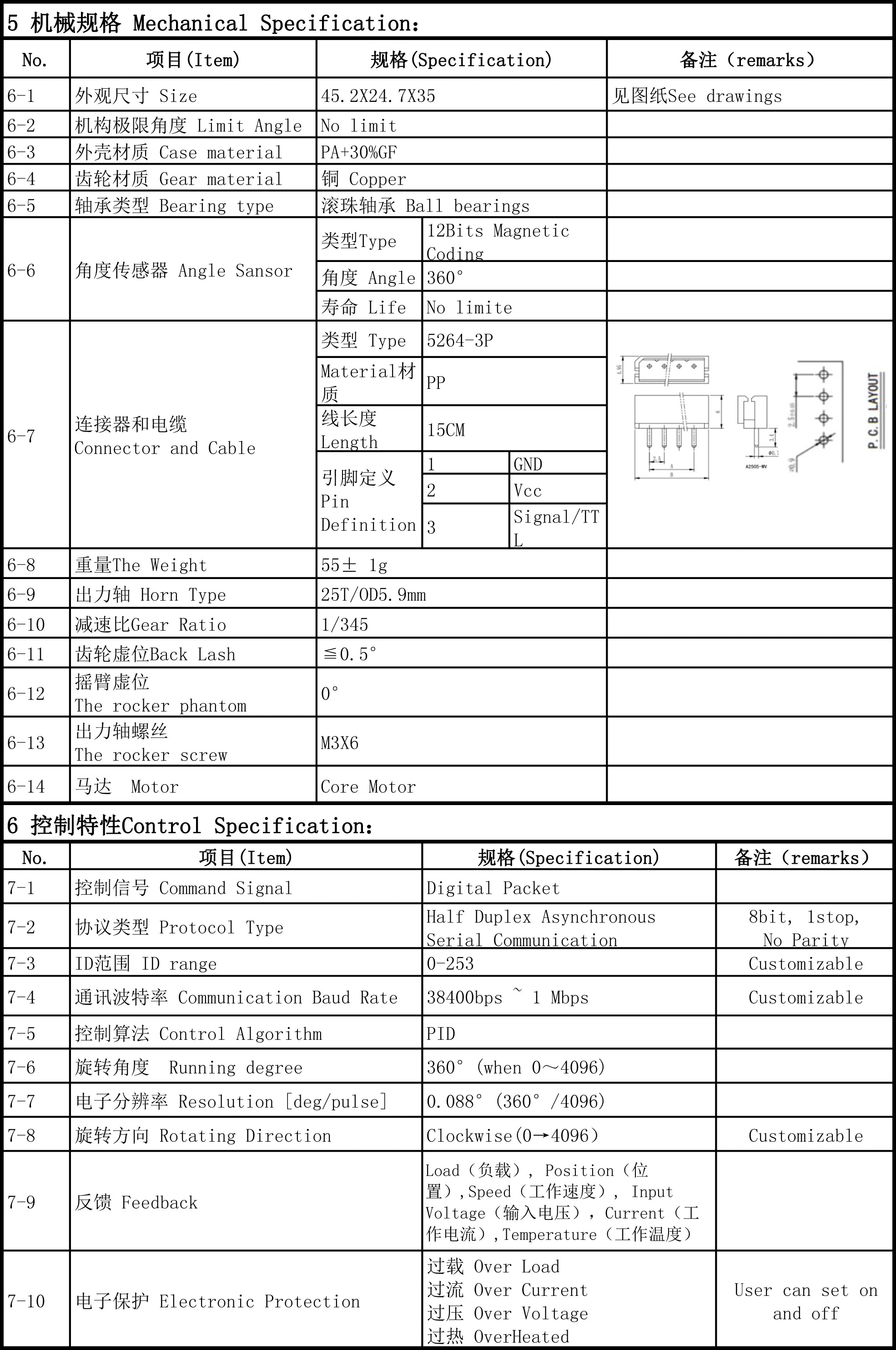
Grootte: 45.2 X 24.7 x 35 mm
Gewicht: 55± 1g
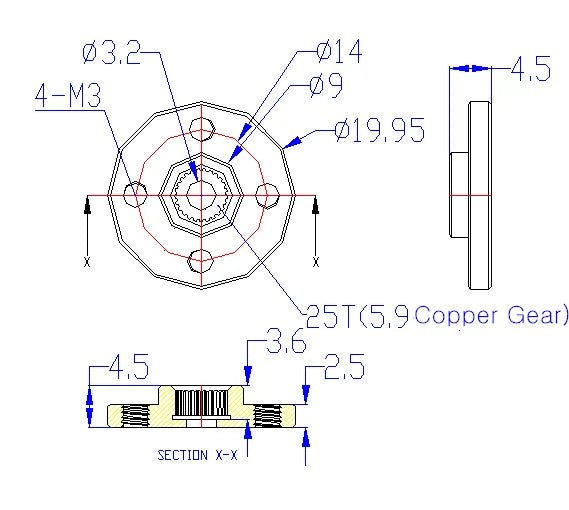
Versnellingstype: Koper
Grenshoek: GEEN limiet
Lager: Kogellagers
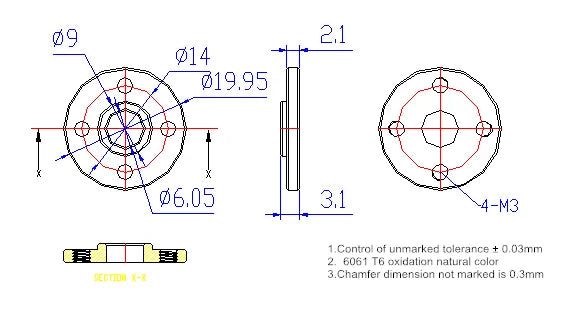
Spline claxon: 25T
Motor: Kernloze motor
Bedrijfsspanningsbereik: 6-7.4V
Piekblokkoppel: 19.5 kg.cm@6V
Nominaal koppel: 6.5 kg.cm@6V
Protocoltype: Halfduplex asynchrone seriële communicatie
|
Productnaam
|
Feetech 2020 nieuw product STS3215Magnetische Encoder 360°Seriële bus Servo Evaluatie
|
|
Grootte
|
45.2X24.7X35mm
|
|
Gewicht
|
55± 1g
|
|
Strekkoppel
|
19.5 [email protected]
|
|
Stalsnelheid
|
|
|
Feedback
|
belasting / positie / snelheid / spanning / stroom / temperatuur
|
|
Elektronische beveiliging
|
bescherming tegen oververhitting / overstroom / overspanning / overbelasting
|
|
gespecialiseerd in ODM en OEM
|
Y
|
|
Levenstest
|
>100000
|
|
De motorgeluiden
|
45±5dB
|
|
Stuurgeluiden
|
60±5dB
|
|
Waterdichte prestaties
|
Nee
|
|
Protocoltype
|
Half duplex asynchrone seriële communicatie
|
-
Structurele kenmerken:
-
De schaal gebruikt een technische plastic schaal met een hogere sterkte, Optimaliseert de middenafstand, Compactere algemene structuur, Het servotandwiel gebruikt een 1:345 koperen tandwielcombinatie, hoger koppel, Bij hetzelfde koppel, vergelijk met de standaard servo maat,het ziet er lager uit (5 mm),Het lichaam heeft een structuurontwerp met dubbele as,De structurele kenmerken van de cirkelvormige vaste stof,Bedradingsmodus van dubbele uitgaande kabels met metalen hoofdservohoorns,Het is geschikt voor toepassing in een viervoetige robot, slang robot, desktoprobot, humanoïde robot en mechanische arm.

2.Servodraad
3.Verpakking: PE-zak, kleurendoos, plastic doos met
uw logo
4.Kabelconnector
5.Aangepast Diverse brede werkspanningservo
1.Acceleratie start-stop-functie: snelheid en acceleratiewaarde kunnen worden ingesteld, het bewegingseffect is zachter.
2.Hoge precisie, 360 graden absolute positie 4096 bit precisie, de hoogste positieresolutie is 0.088 graden, als de bediening 90 graden is, voer dan 4096/360 * 90 = 1024 in, als de bediening 180 graden is, voer dan 4096/360 * 180 = 2048 in, om te berekenen.
3.Er zijn vier werkmodischakelingen (modus 0 positieservo, modus 1 snelheid gesloten lus, modus 2 snelheid open lus, modus 3 stappenservo).
1)、Modus 0: Locatiemodus, de standaardmodus. In deze modus kan een absolute hoekcontrole van 360 graden worden gerealiseerd. Ondersteuning van versnellingsbeweging.
2)、Modus 1: Snelheid met gesloten lus, in de programmeerinterface is de bedieningsmodus ingesteld op 1, schakel over naar de snelheidsmodus met gesloten lus en voer de overeenkomstige snelheid in de snelheidskolom in die moet worden uitgevoerd.
3)、Modus 2: Snelheid open-lus, in de programmeerinterface is de bedieningsmodus ingesteld op 2, schakel over naar snelheid open-lus-modus en voer de overeenkomstige tijd in de tijdkolom in die moet worden uitgevoerd.
4)、Modus3:Stapmodus: in de programmeerinterface is de maximale/minimale hoeklimiet ingesteld op 0 en de bedieningsmodus op 3. Schakel over naar de stapmodus. Voer de positie in de positiebalk in om naar de doelpositie te stappen. Klik nogmaals op de positie om in dezelfde richting te blijven stappen.
4、Multi-turn-modus, 360 graden absolute controle en feedback, met de hoogste nauwkeurigheid kan de absolute positiecontrole plus of min 7 slagen zijn, maar het aantal stroomcycli wordt niet opgeslagen, alleen de absolute positie feedbackwaarde blijft behouden.
5、Eén sleutelkalibratie, 360 graden hoekinstallatie op elke positie, (40 (decimaal) adresinvoer 128 (decimaal)) één sleutelcorrectie huidige positie is het midden (2048 (decimaal)).
6、TTL-communicatieniveau, half duplex asynchrone communicatie, busprotocolondersteuning om lees- en schrijfparameters aan te passen, en synchrone leesfunctie toe te voegen (stuur een instructie om de terugleesinstructie van elke servo op de bus beurtelings te ontvangen .)
7、Meerdere beveiligingen, (overbelasting, overstroom, overspanning, oververhitting, schakelaarinstelling, wijziging van conditieparameters)
1)、Overbelastingsbeveiliging: door positiedetectie, tijdens de beweging vanaf het begin positie naar de doelpositie, wanneer wordt gedetecteerd dat de huidige positie niet de doelpositie is na het tegenkomen van het blokkeren van obstakels, duurt de loskracht 2S (20% van de standaard blokkeerkracht). Totdat een nieuw commando wordt geactiveerd, Beveiliging vrijgeven
2)、Overstroombeveiliging: controleer via de ingestelde stroomwaarde of de stroom de ingestelde stroomwaarde bereikt. Wanneer de ingestelde stroomwaarde wordt bereikt, laat u de kracht los (het standaardkoppel is 0). Totdat een nieuw commando wordt geactiveerd, Beveiliging vrijgeven
3)、Overspanningsbeveiliging: detecteert de huidige spanningswaarde. Als deze de ingestelde spanningswaarde overschrijdt, geeft het alarm een overspanning weer.
4)、Oververhittingsbeveiliging: detecteer de huidige motortemperatuur. Als de temperatuur de ingestelde waarde overschrijdt, geeft het alarm oververhitting weer.
8: Meerdere feedback:
1) Belastingfeedback: de stroomregeluitgang stuurt de spanningscyclus van de motor aan, en de volledige schaal is 1000 = 100% koppeluitgang.
2)Huidige feedback: de servowerkstroom, 1 = 6.5mA
3)Spanningsfeedback: de servowerkspanning, 70=7V,0.1V
4)Temperatuurfeedback: interne werktemperatuur van de huidige servo (temperatuur meten)。
5)Snelheidsfeedback: feedback van de snelheid van de huidige motorrotatie en het aantal stappen in tijdseenheid (per seconde)
9, Open PID-parameters.





Related Collections







