

HOOG KOPPEL HTDW-6056-36-NE-JC Motor (Kruisrollerversie), 36 Verhouding, 10Nm Nominaal, 12-48V
HOOG KOPPEL HTDW-6056-36-NE-JC Motor (Kruisrollerversie), 36 Verhouding, 10Nm Nominaal, 12-48V
HIGH TORQUE
Normale prijs
$362.00 USD
Normale prijs
Aanbiedingsprijs
$362.00 USD
Eenheidsprijs
per
Belastingen inbegrepen.
Verzendkosten worden berekend bij de checkout.
Kan beschikbaarheid voor afhalen niet laden
Overzicht
De HIGH TORQUE HTDW-6056-36-NE-JC Motor is een hoog koppel motor module met een reductieverhouding van 36 en een gekruiste roller versie structuur. Het is gespecificeerd voor 12-48V werking met 14-bits in-/uitgang encoder resolutie en is ontworpen voor nauwkeurige lage snelheid, hoog koppel actuatie.
Belangrijkste Kenmerken
- Model: HTDW-6056-36-NE-JC (ook gelabeld als HTDW-6056-36-JC op productkunst)
- Kruisrolversie
- Laag speling: <10Arcmin
- Encoder resolutie: 14-bits (invoer), 14-bits (uitvoer)
- Besturingsfrequentie: 3kHz
- Snelle responstijd: ≤200us
Specificaties
| Lengte en Breedte | 60mm |
| Hoogte | 56mm |
| Gewicht | 570g |
| Speling | <10Arcmin |
| Herhaal Positie Nauwkeurigheid | <12Arcmin |
| Absolute Positie Nauwkeurigheid | <15Arcmin |
| Koppelconstante | / |
| Aantal Poolparen | 14 |
| Reductieverhouding | 36 |
| Vergrendel-rotor Koppel | 36Nm |
| Geen belasting RPM | 60RPM |
| Geclassificeerd Koppel | 10Nm |
| Geclassificeerde RPM | 50RPM |
| Beoordeling | 52W |
| Spanningsbereik | 12-48V |
| Piekstroom | 10A |
| Snelheidsregelingsnauwkeurigheid | ±10% |
| Ingang Encoder Resolutie | 14-bits |
| Baud Rate | 5Mbps |
| Geclassificeerde Stroom | 3A |
| Regelnauwkeurigheid | ±20% |
| Responsietijd | ≤200us |
| Uitgang Encoder Resolutie | 14-bits |
| Regelfrequentie | 3kHz |
Toepassingen
- Humanoïde Robots
- Robotarmen
- Exoskeletten
- Kwadruped Robots
- AGV Voertuigen
- ARU Robots
Voor integratieondersteuning en vragen voor de verkoop, neem contact op [email protected] or bezoek https://rcdrone.top/.
Handleidingen & Downloads
- HOOG KOPPELMOTOR Debugging Assistent Gebruikershandleiding (PDF)
- Debugging Handleiding (PDF)
- 1.2 fdcan Protocol Analyse (PDF)
- Gebruikershandleiding (PDF)
- HTDW-6056-36-NE-JC 3D Model (STP in ZIP)
Details

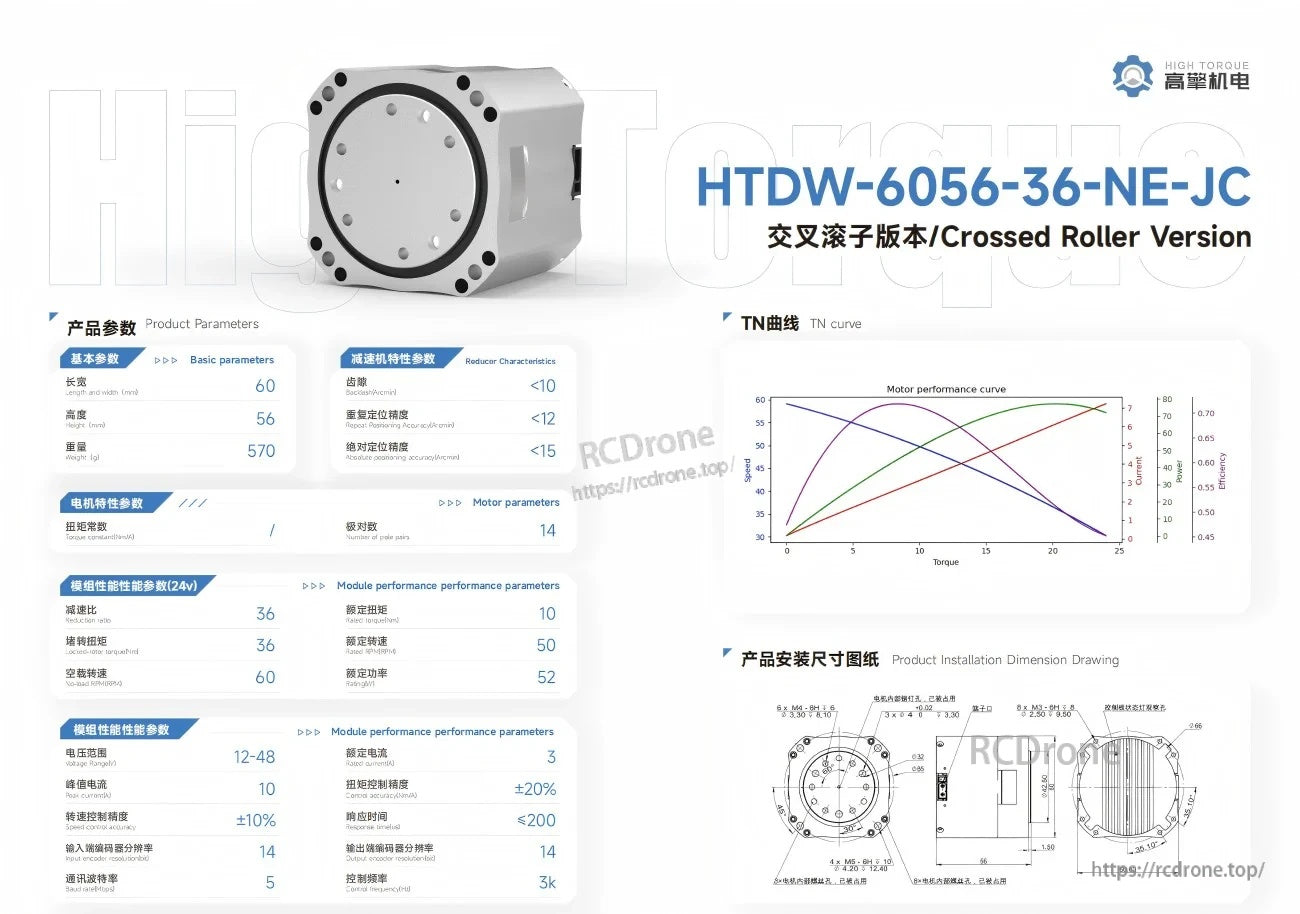
Gedetailleerde parameters en montage-afmetingen voor de gekruiste roller versie helpen om de pasvorm en prestaties te bevestigen voordat integratie plaatsvindt.
Related Collections

