Holybro DroneCAN M8N GPS-module - STM32G4 Processor BMM150 Kompas 3GNSS Ondersteuning DroneCAN-protocol
Holybro DroneCAN M8N GPS-module - STM32G4 Processor BMM150 Kompas 3GNSS Ondersteuning DroneCAN-protocol
HolyBro
Kan beschikbaarheid voor afhalen niet laden
Beschrijving
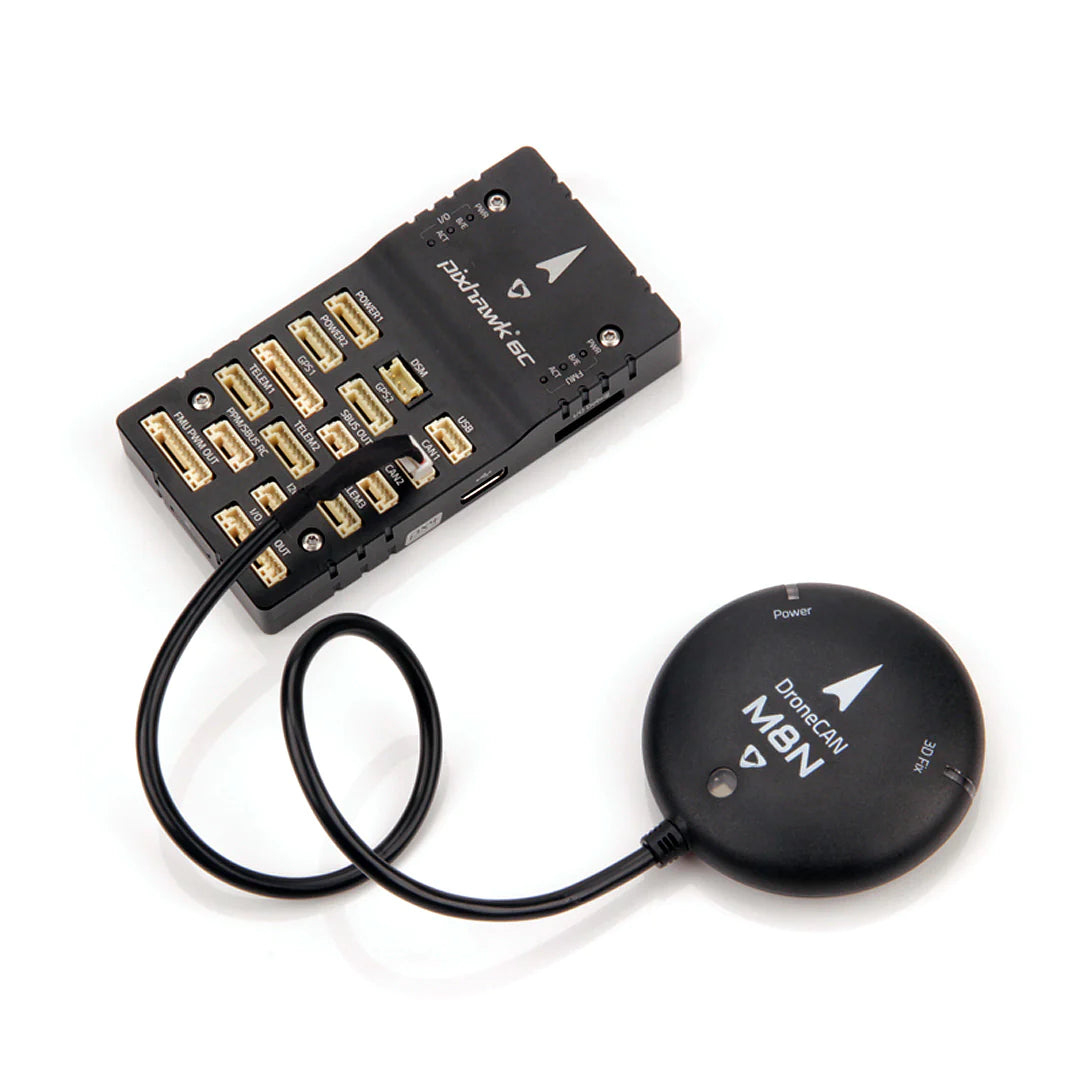
De Holybro DroneCAN GPS heeft een UBLOX M8N- of M9N-module, BMM150-kompas en driekleurige LED-indicator. Het heeft de STM32G4-processor en heeft het DroneCAN-protocol voor communicatie overgenomen, waardoor het betrouwbaarder is en beter in het omgaan met elektromagnetische interferentie in vergelijking met een seriële verbinding. Het neemt geen enkele seriële poort van de vluchtcontroller in beslag en verschillende CAN-apparaten kunnen via een CAN-splitterkaart op dezelfde CAN-bus worden aangesloten.
Specificatie:
| DroneCAN M8N | |
| GNSS-ontvanger | Ublox NEO M8N |
| Aantal gelijktijdige GNSS | Tot 3 GNSS (GPS, Galileo, GLONASS, BeiDou) |
| Verwerker | STM32G4 (170MHz, 512K FLASH) |
| Kompas | BMM150 |
| Frequentieband | GPS: L1C/A GLONASS: L10F Beidou: B1I Galileo: E1B/C |
| GNSS-augmentatiesysteem | SBAS: WAAS, EGNOS, MSAS, QZSS |
| Navigatie-update | 5Hz Standaard(10Hz MAX) |
| Nauwkeurigheid | 2,5 m |
| Snelheidsnauwkeurigheid | 0,05 m/s |
| Max. aantal satellieten | 22+ |
| Communicatieprotocol | DroneCAN @ 1 Mbit/s |
| Ondersteunt stuurautomaat FW | PX4, Ardupilot |
| Poorttype | GHR-04V-S |
| Antenne | 25 x 25 x 4 mm keramische patchantenne |
| Stroomverbruik | Minder dan 200 mA bij 5V |
| Spanning | 4,7-5,2V |
| Bedrijfstemperatuur | -40~80C |
| Grootte | Diameter: 54 mm Dikte: 14,5 mm |
| Gewicht | 36g |
| Kabellengte | 26 cm |
| Andere opmerkingen | - LNA MAX2659ELT+ RF-versterker - Oplaadbare Farah-capaciteit - 3,3V-regelaar met laag geluidsniveau |
Ga voor overige technische informatie naar https://docs.holybro.com/
DroneCAN
DroneCAN is het primaire CAN-protocol dat door de ArduPilot- en PX4-projecten wordt gebruikt voor communicatie met CAN-randapparatuur. Het is een open protocol met open communicatie, specificatie en meerdere open implementaties.
DroneCAN-ontwikkeling
Het DroneCAN-project heeft een actieve ontwikkelingsgemeenschap.
- discussies over onenigheid op https://dronecan.org/discord
- ontwikkeling op github op https://github.com/DroneCAN
Related Collections