Holybro Pixhawk 4 stuurautomaat vluchtcontroller
Holybro Pixhawk 4 stuurautomaat vluchtcontroller
HolyBro
Kan beschikbaarheid voor afhalen niet laden
Pixhawk® 4 beschikt over geavanceerde processortechnologie van STMicroelectronics®, sensortechnologie van Bosch®, InvenSense® en een NuttX real-time besturingssysteem. Deze leveren ongelooflijke prestaties, flexibiliteit en betrouwbaarheid voor de besturing van elk autonoom voertuig.
De microcontroller van de Pixhawk 4 heeft 2 MB flashgeheugen en 512 KB RAM. Met de toegenomen kracht en RAM-bronnen kunnen ontwikkelaars productiever en efficiënter zijn met hun ontwikkelingswerk. Complexere algoritmen en modellen kunnen op de automatische piloot worden geïmplementeerd.
Hoogwaardige, ruisarme IMU's aan boord zijn ontworpen voor stabilisatietoepassingen. Data-ready signalen van alle sensoren worden naar afzonderlijke interrupt- en timer capture-pinnen op de automatische piloot geleid, wat nauwkeurige tijdstempeling van sensorgegevens mogelijk maakt. Nieuw ontworpen trillingsisolaties maken nauwkeurigere metingen mogelijk, waardoor voertuigen betere algehele vluchtprestaties kunnen bereiken.
De twee externe SPI-bussen en zes bijbehorende chip select-lijnen maken het mogelijk om extra sensoren en SPI-interfaced payload toe te voegen. Er zijn in totaal vier I2C-bussen, twee speciaal voor extern gebruik en twee gegroepeerd met seriële poorten voor GPS/Compass-modules.
Opmerking:
- M10 GPS vereist PX4 1.14 en ArduPilot 4.3 of nieuwer.
- Vergelijkingstabel voor vermogensmodules
Technische specificaties
- Hoofd FMU-processor
- STM32F765 - 32 Bit Arm ® Cortex® -M7, 216MHz, 2MB geheugen, 512KB RAM
- STM32F765 - 32 Bit Arm ® Cortex® -M7, 216MHz, 2MB geheugen, 512KB RAM
- IO-processor
- STM32F103 - 32 Bit Arm® Cortex®-M3, 72MHz, 64KB SRAM (huidig)
- STM32F100 - 32 Bit Arm ® Cortex® -M3, 24MHz, 8KB SRAM (niet meer leverbaar)
- Sensoren aan boord
- Versnellingsbak/gyro: ICM-20689
- Versnellingsbak/gyro: BMI055/ICM-20602
- Magazijn: IST8310
- Luchtdrukmeter: MS5611
- Versnellingsbak/gyro: ICM-20689
Elektrische gegevens
- Uitgangsvermogen van de voedingsmodule: 4,9~5,5V
- Maximale ingangsspanning: 6V
- Maximale stroomdetectie: 120A
- USB-voedingsingang: 4,75~5,25V
- Servo Rail-ingang: 0~36V
- Bedrijfstemperatuur: -25-85°C
Mechanische gegevens
- Afmetingen: 44x84x12mm
- Gewicht (kunststof behuizing): 33.3g
- Gewicht (aluminium behuizing): 49 g
Downloaden:
Artikelnummer 11032/11035 Bevat:
- Pixhawk 4 Vluchtcontroller (kunststof of aluminium)
- Kabelset
Artikelnummer 20045/20046/20114/20115 Bevat:
- Pixhawk 4 VluchtcontrollerKunststof of Aluminium)
- Vermogensmodule: PM02 V3 12S/PM07 14S
- Kabelset
Artikelnummer 20139/20140/20141/20142/20269/20270/20271/20272 Bevat:
- Pixhawk 4 Vluchtcontroller
- Vermogensmodule: PM02 V3 12S/PM07 14S
- GPS-functie: M9N/M10
- Kabelset

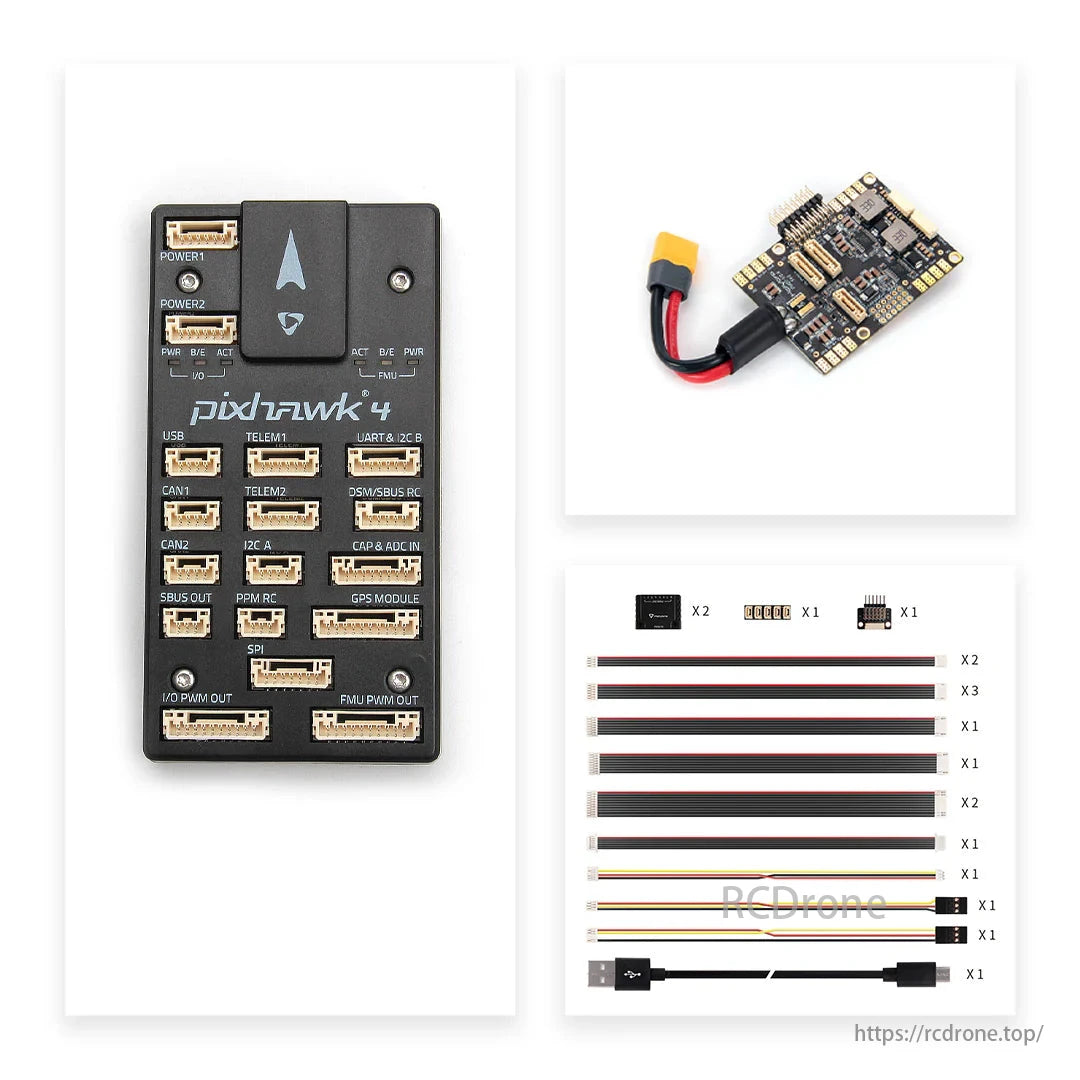
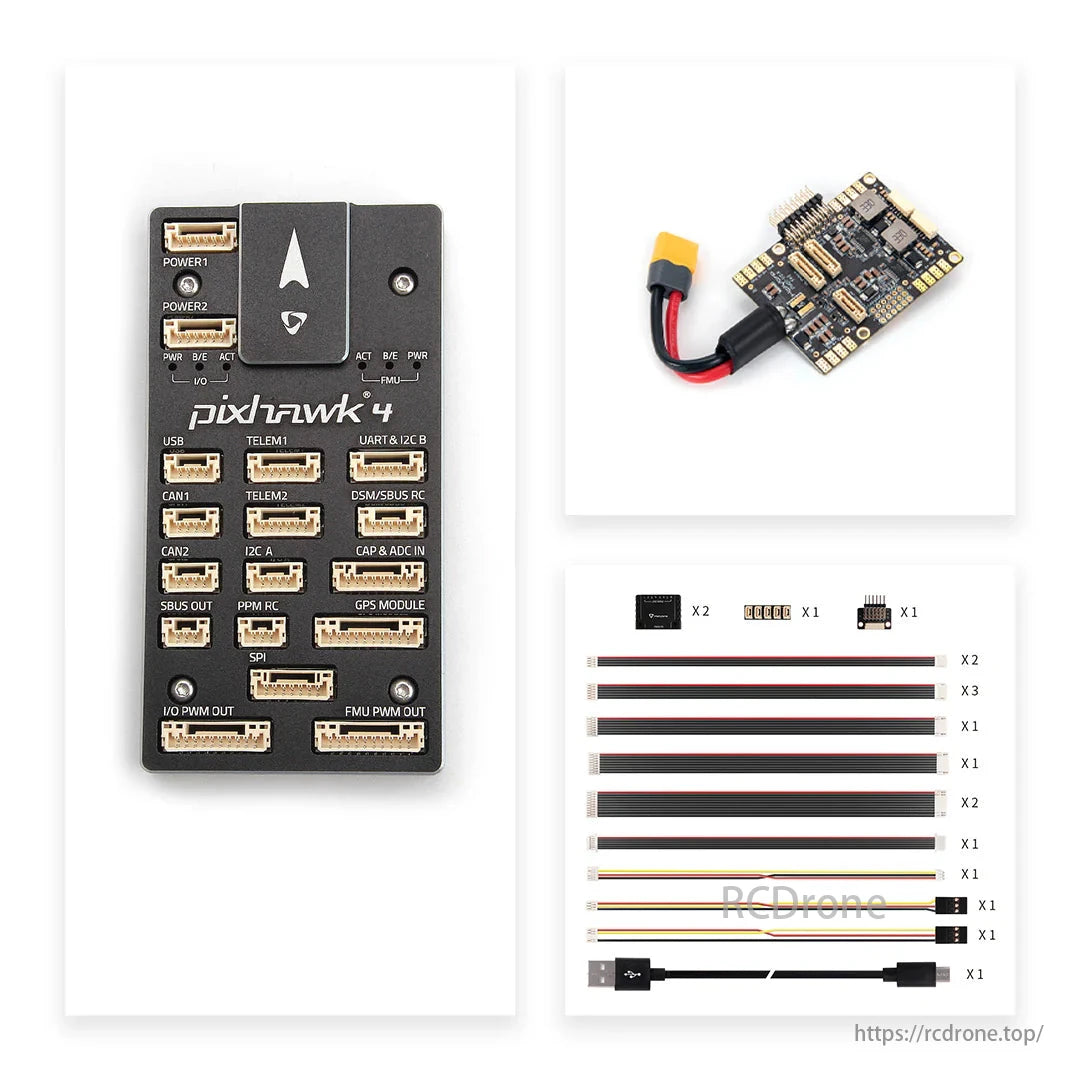
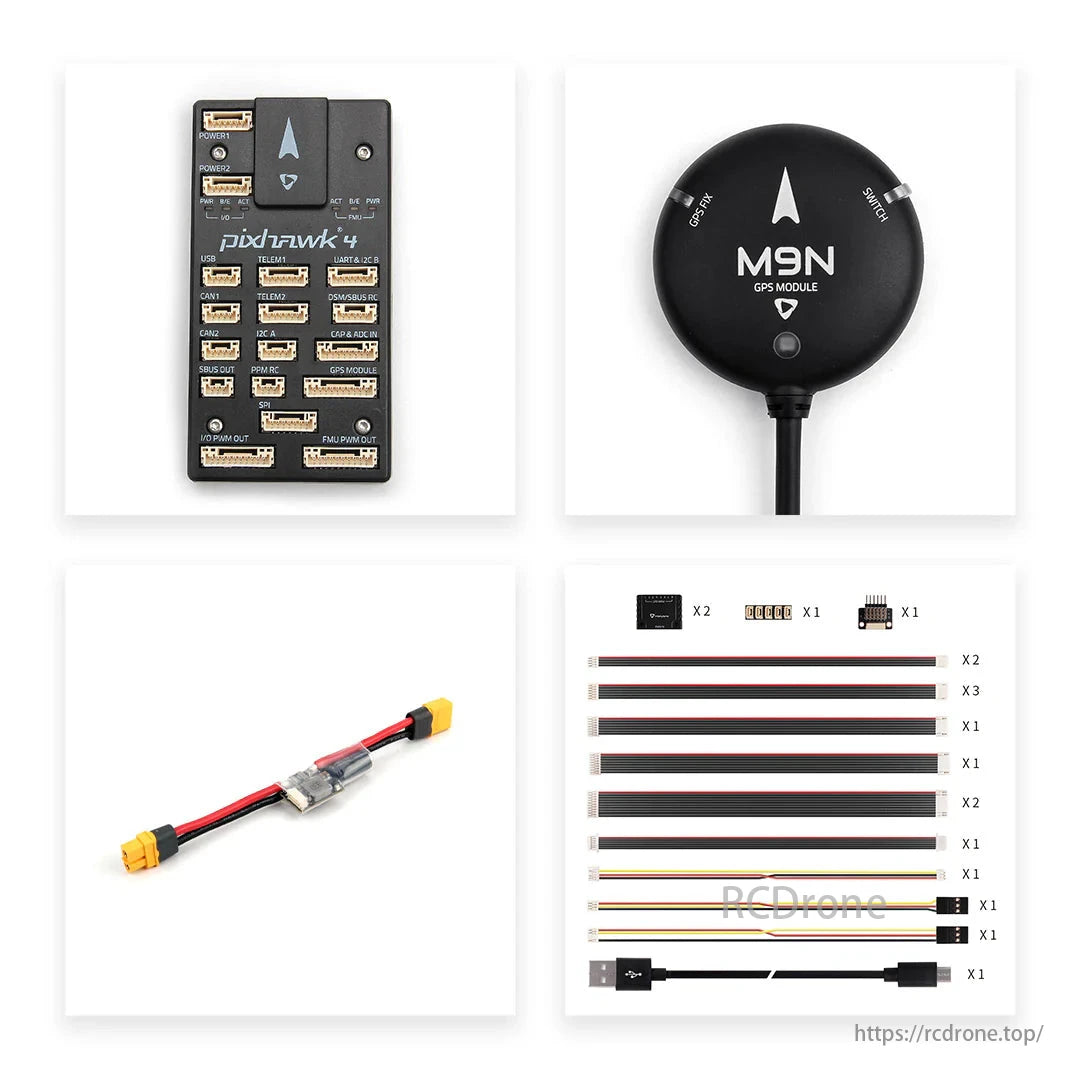
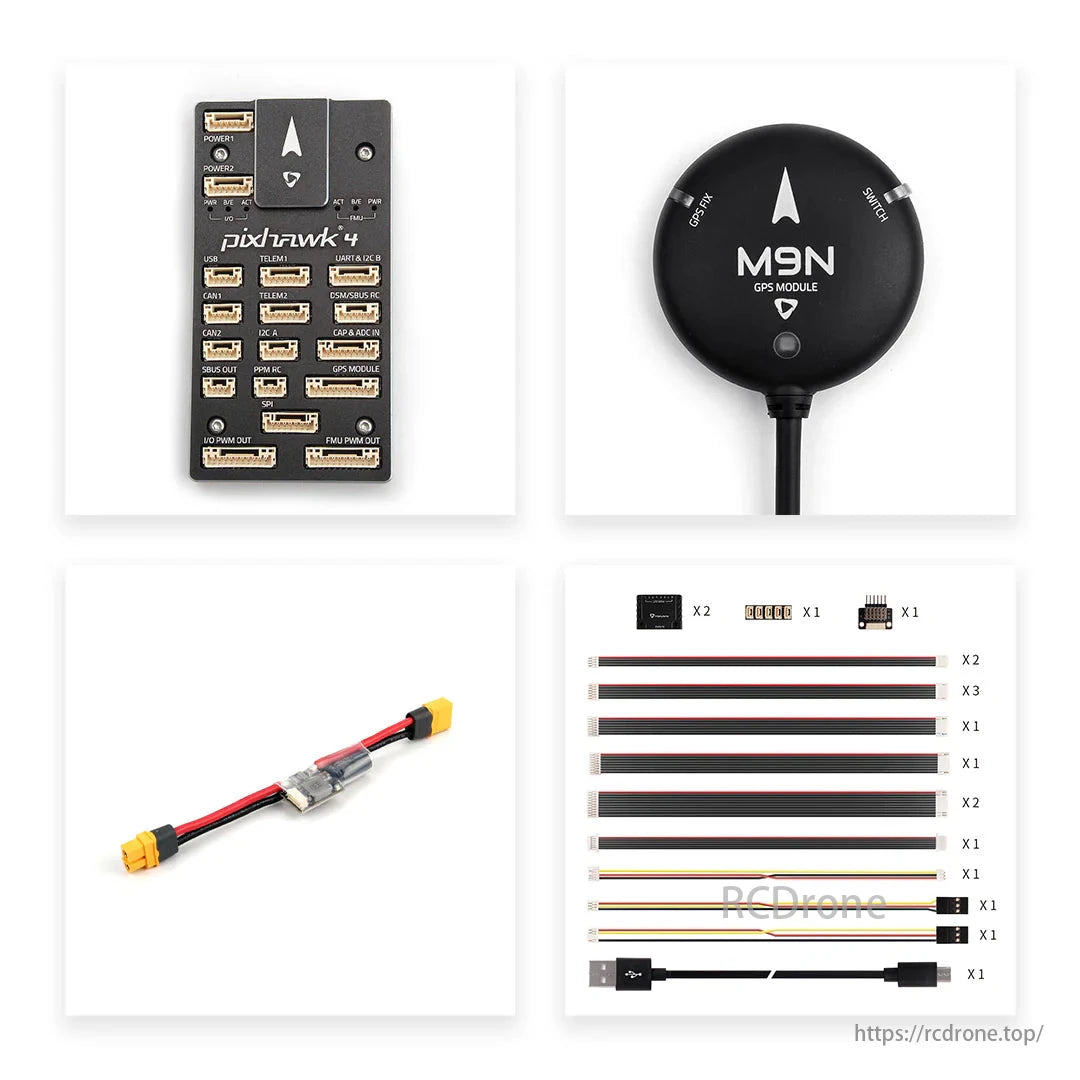
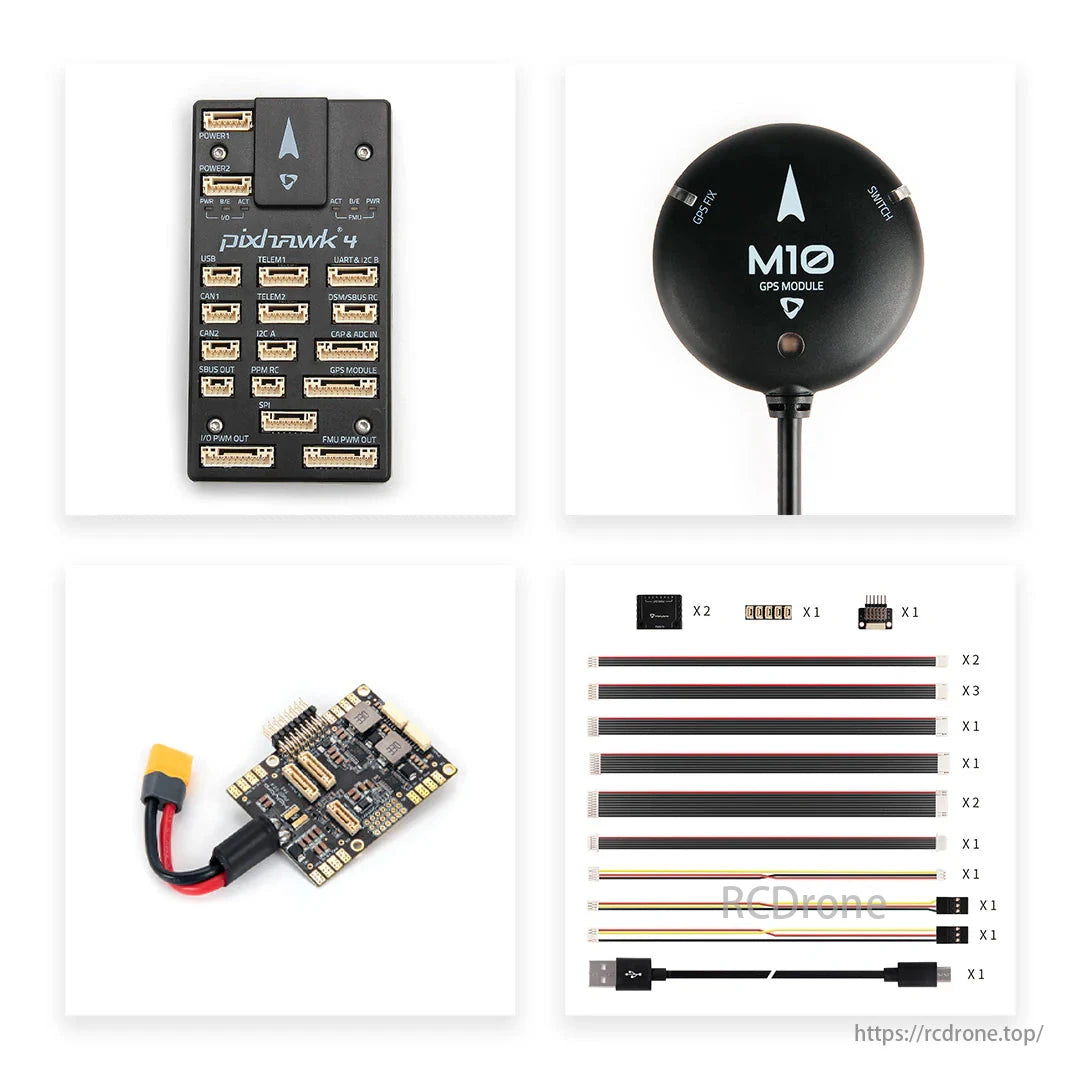
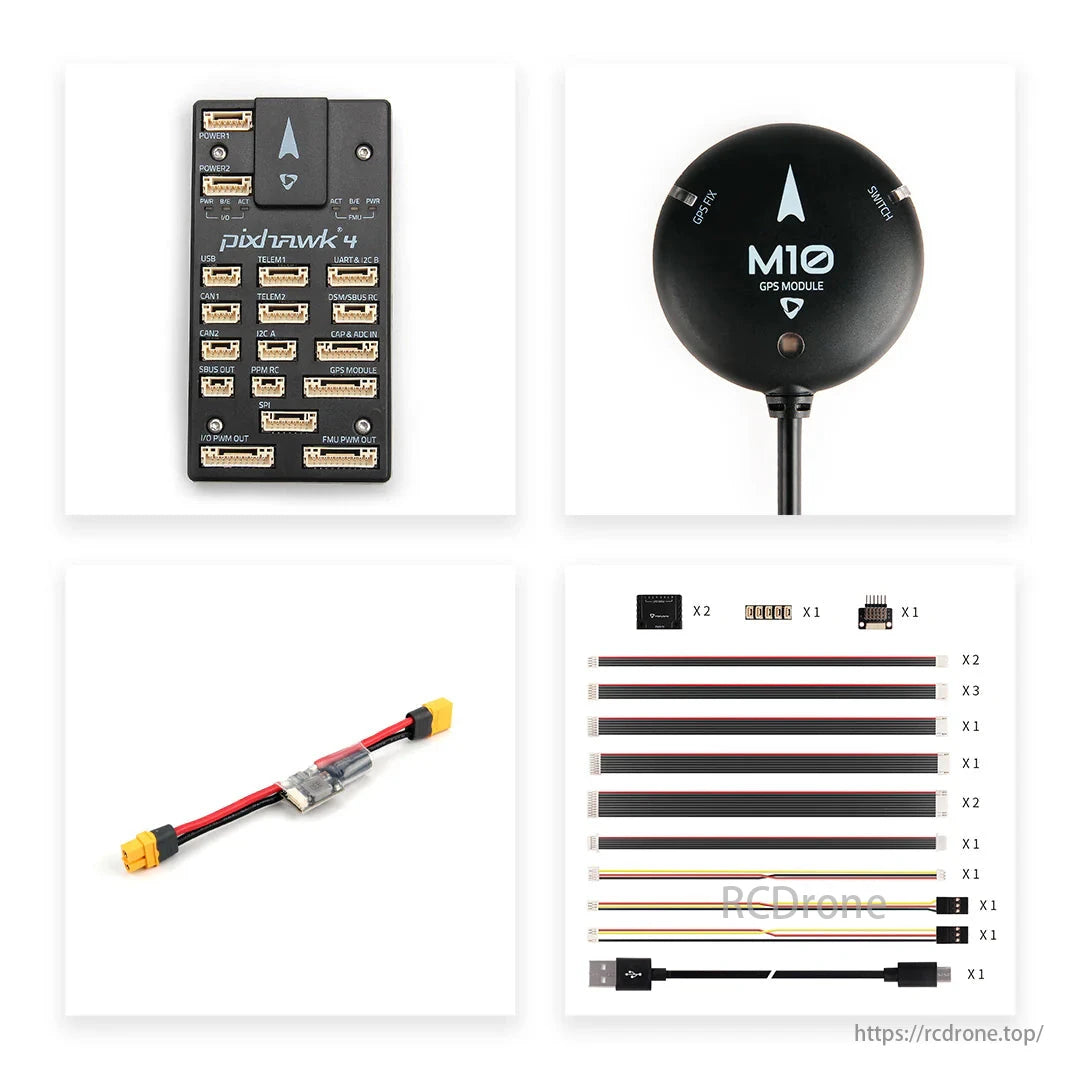
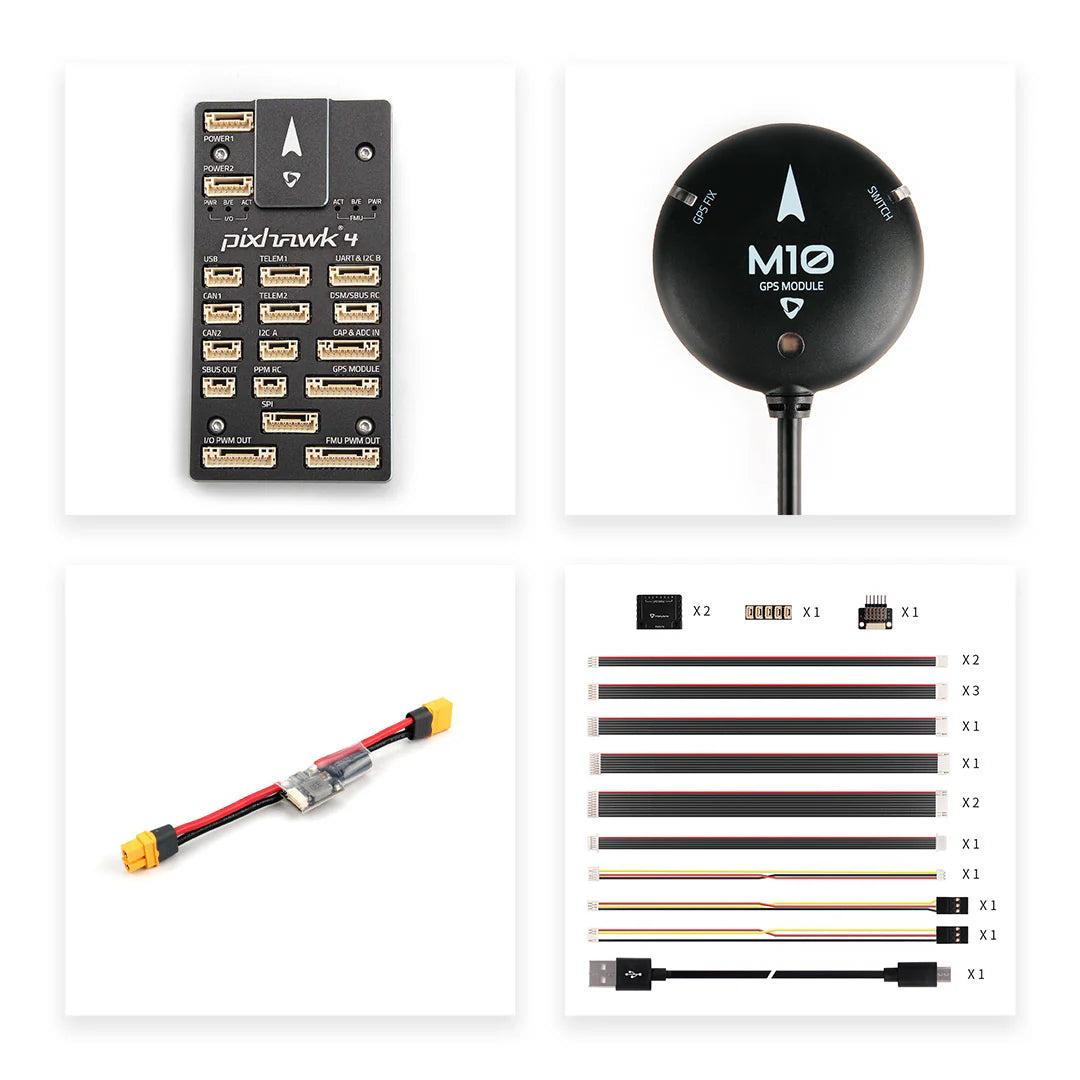
Pixhawk 4-vluchtcontroller met diverse poorten, waaronder USB, CAN, TELEM, UART, I2C, SBUS OUT, PPM RC, SPI en GPS MODULE.

Pixhawk-vluchtcontroller, aangestuurd door het PX4-stuurautomaatsysteem.

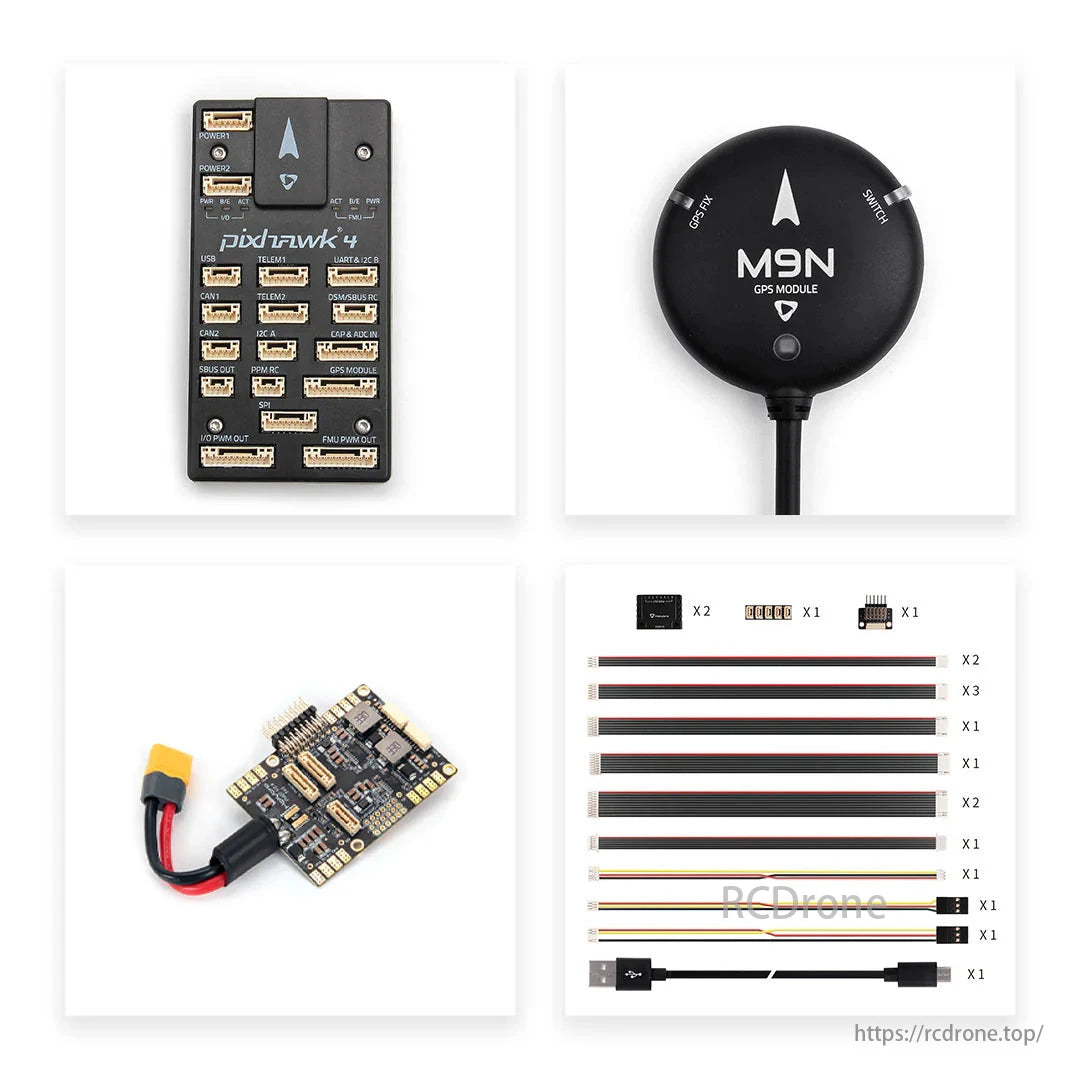
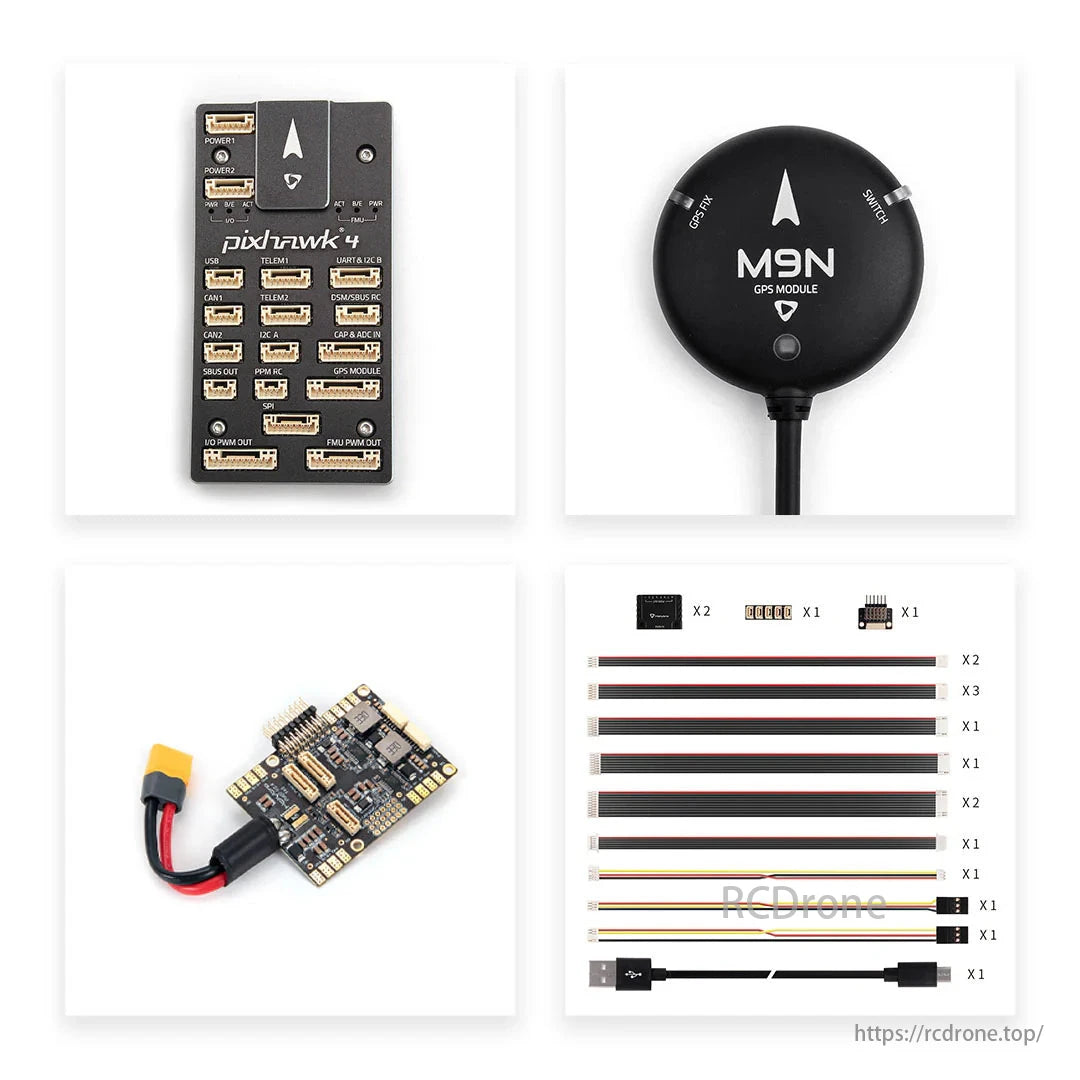
Pixhawk 4-vluchtcontroller, M9N GPS-module, voedingsmodule met XT60-connector en diverse kabels voor de montage van RC-drones.

Pixhawk 4 flight controller met diverse poorten, waaronder USB, CAN en GPS module. Inclusief een power module en meerdere kabels voor verbindingen.

Pixhawk 4-vluchtcontroller, M9N GPS-module, voedingsmodule met XT60-connector en diverse kabels voor verbindingen.