Holybro Pixhawk 6X (ICM-45686) Flight Controller – Drievoudig redundante IMU, STM32H753, Ethernet, Compatibel met PX4 & ArduPilot
Holybro Pixhawk 6X (ICM-45686) Flight Controller – Drievoudig redundante IMU, STM32H753, Ethernet, Compatibel met PX4 & ArduPilot
HolyBro
Kan beschikbaarheid voor afhalen niet laden
Overzicht
De Holybro Pixhawk 6X (ICM-45686) is een hoogpresterende, modulaire autopilot vluchtcontroller ontworpen voor veeleisende industriële en commerciële drone-toepassingen. Met drievoudig-redundante ICM-45686 IMU's met BalancedGyro™ technologie, dubbele barometers en een STM32H753-processor die draait op 480 MHz, biedt de Pixhawk 6X ongeëvenaarde betrouwbaarheid, realtime prestaties en flexibiliteit. De modulaire architectuur, geavanceerde trillingsisolatie en Ethernet-interface maken het ideaal voor UAV-systemen die robuuste controle, precisie en aanpassingsvermogen aan missies vereisen.
Belangrijkste Kenmerken
-
Drievoudige IMU Redundantie: 3x ICM-45686 IMU's (±32g) met BalancedGyro™ technologie voor fouttolerante inertiële navigatie
-
Dubbele Barometers: ICP20100 en BMP388 voor verbeterde hoogte-precisie
-
Hoge Snelheid Processor: STM32H753 Cortex-M7, 480MHz, met 2MB Flash & 1MB RAM
-
Modulair Ontwerp: Scheidt FMU, IMU en basisplaat, verbonden via 100-pins & 50-pins Pixhawk® Bus
-
Temperatuur-gecontroleerde IMU Bord: Zorgt voor optimale sensorprestaties over temperatuur ranges
-
Ethernet Integratie: Ondersteunt hoge-snelheid communicatie met missiecomputers
-
Digitale Voedingsmodule Ondersteuning: Levert nauwkeurigere spanning en stroommetingen
Geavanceerd Isolatiesysteem: Duurzaam, op maat gemaakt materiaal biedt hoge-spectrum trillingsdemping
-
Firmware Compatibiliteit: Wordt geleverd met PX4 (v1.14.3+), ondersteunt ArduPilot (v4.5.0+)
Specificaties
Processoren & Sensoren
| Component | Details |
|---|---|
| FMU Processor | STM32H753, ARM Cortex-M7, 480MHz, 2MB Flash, 1MB RAM |
| IO Processor | STM32F103, ARM Cortex-M3, 72MHz |
| IMU Sensoren | 3x ICM-45686 (BalancedGyro™) |
| Barometer | ICP20100 & BMP388 |
| Magnetometer | BMM150 |
| Veilige Element | NXP SE050 Plug & Trust |
Elektrische Parameters
| Parameter | Value |
|---|---|
| Max Ingangsspanning | 6V |
| USB Voeding Ingang | 4.75~5.25V |
| Servo Rail Spanning | 0~36V |
| Telem1 & GPS2 Stroomlimiet | 1.5A gecombineerd |
| Andere Poorten Stroomlimiet | 1.5A gecombineerd |
| PWM Signaal Spanning | Standaard 3.3V (schakelbaar naar 5V via weerstand) |
| Bedrijfstemperatuur | -25°C tot +85°C |
Mechanische Afmetingen & Gewicht
| Component | Afmetingen (mm) | Gewicht (g) |
|---|---|---|
| Vluchtcontroller | 38.8 x 31.8 x 16.8 | 31.3g |
| Standaard Basisplaat | 52.4 x 102 x 16.7 | 72.5g |
| Mini Basisbord | 43.4 x 72.8 x 14.2 | 26.5g |
Firmware Compatibiliteit
-
PX4: Volledig ondersteund vanaf versie 1.14.3 en hoger
-
ArduPilot: Volledig ondersteund vanaf versie 4.5.0 en hoger
-
Firmware-flitsen ondersteund via Mission Planner of QGroundControl
Toepassingen
Ideaal voor integratie in:
-
Industriële drones
-
Commerciële UAV-systemen
-
VTOL-vliegtuigen
-
Academische onderzoeksplatforms
-
Multi-sensor en hoogbetrouwbare missies
Details

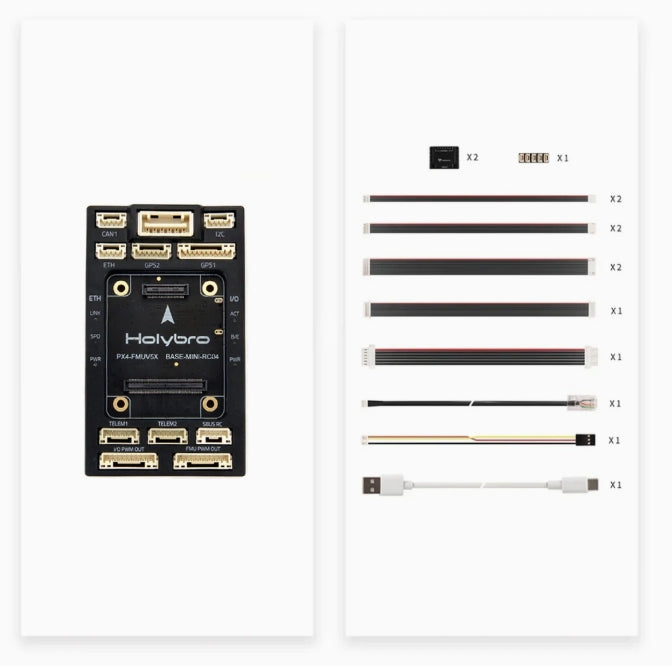
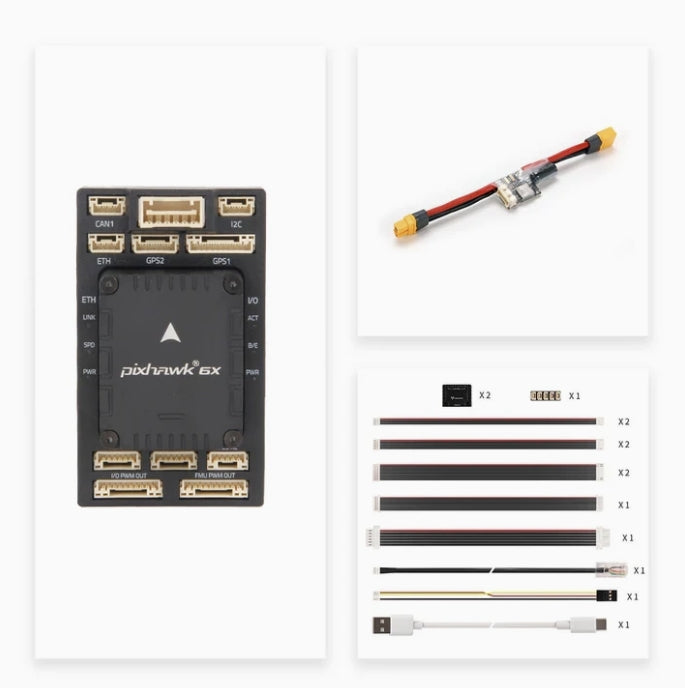
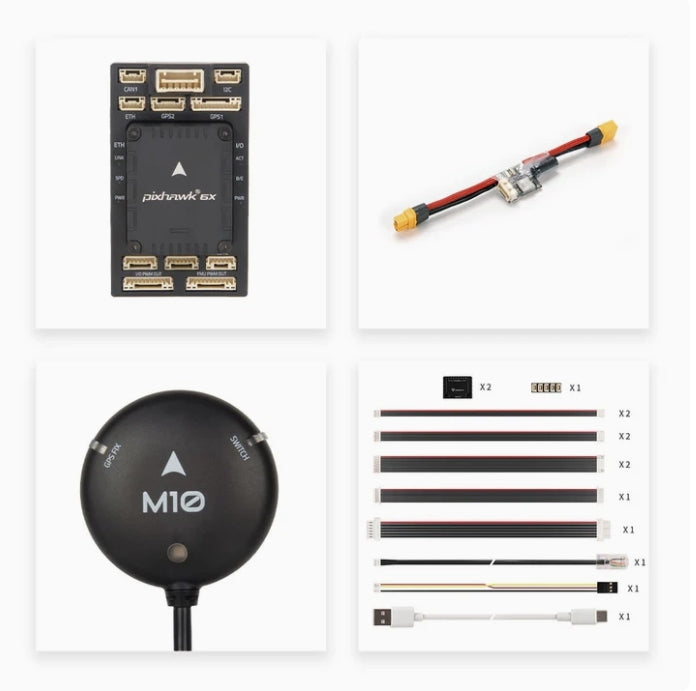
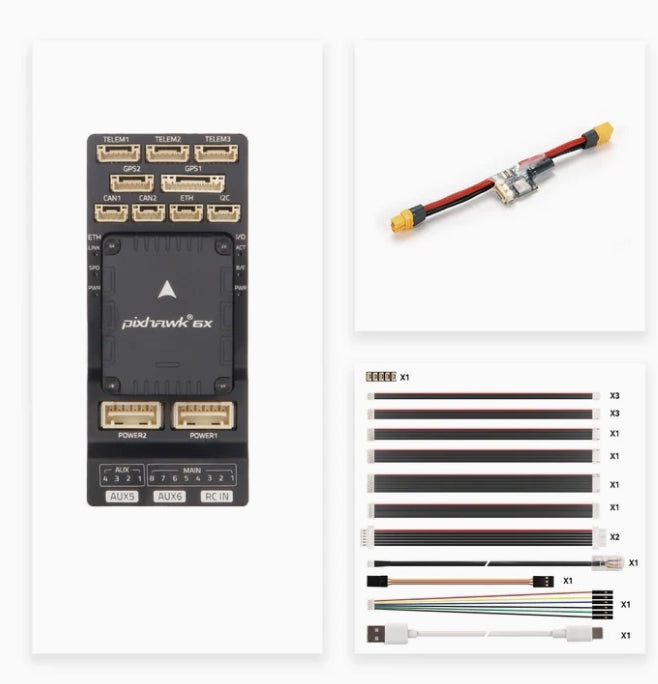
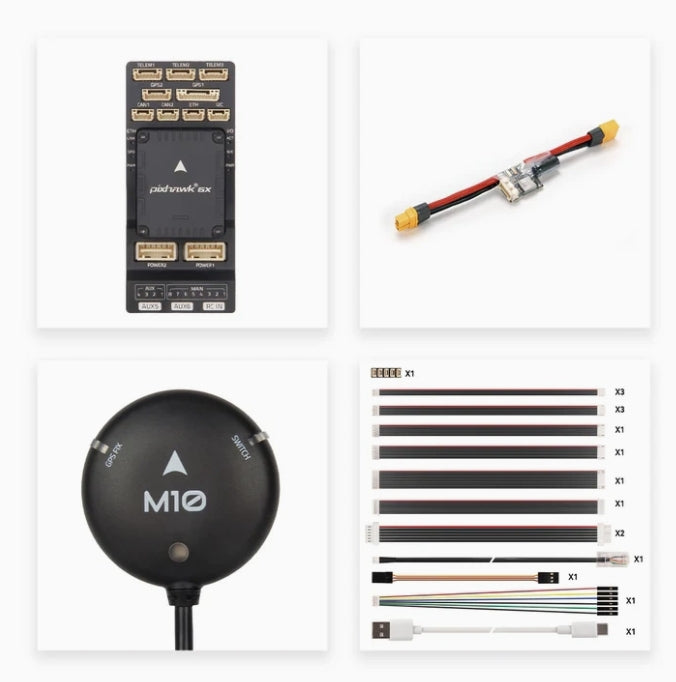
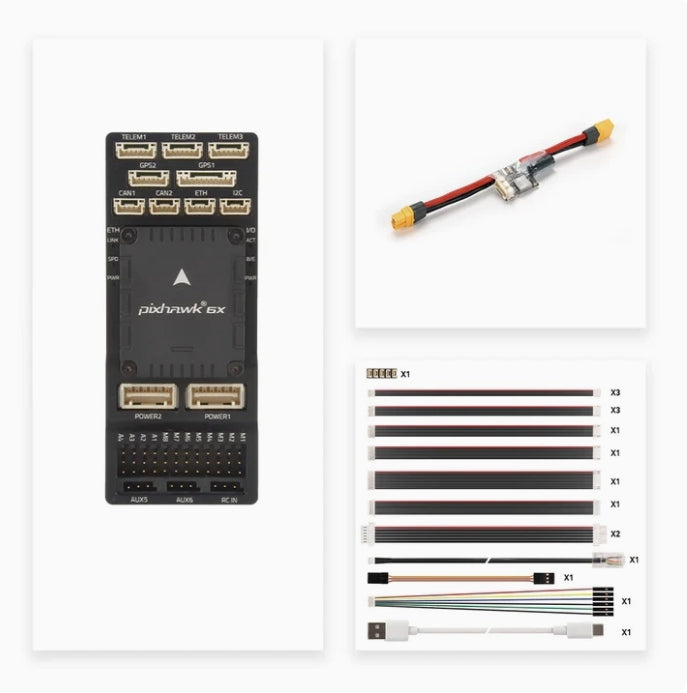
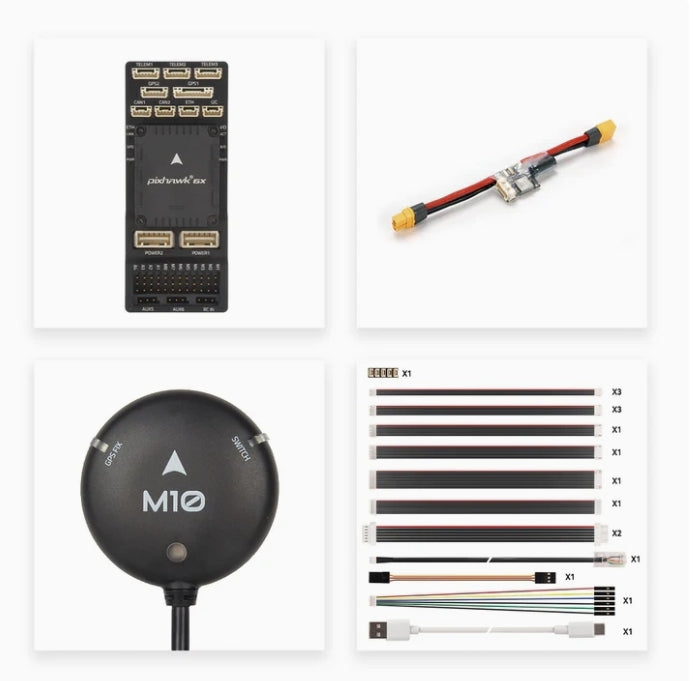
Pixhawk 6X biedt een slanker ontwerp met twee modellen. Het heeft een verbeterde pinheader voor betere connectiviteit en prestaties, waardoor het ideaal is voor geavanceerde toepassingen. Kies het juiste model voor uw behoeften.
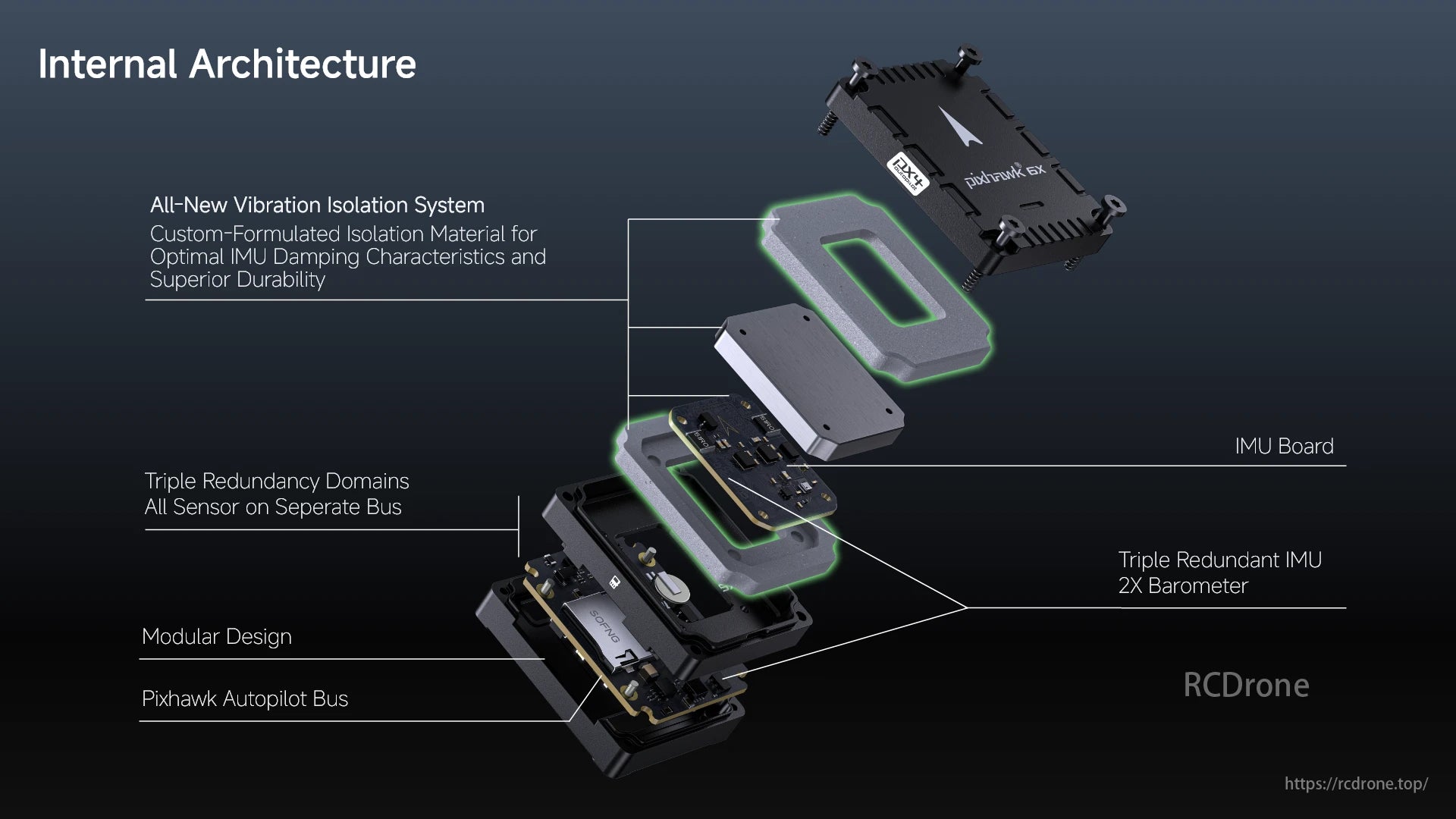
Holybro Pixhawk 6X biedt trillingsisolatie, drievoudige redundantie, modulaire ontwerp, autopilot bus, IMU bord en 2x barometer voor geavanceerde prestaties.
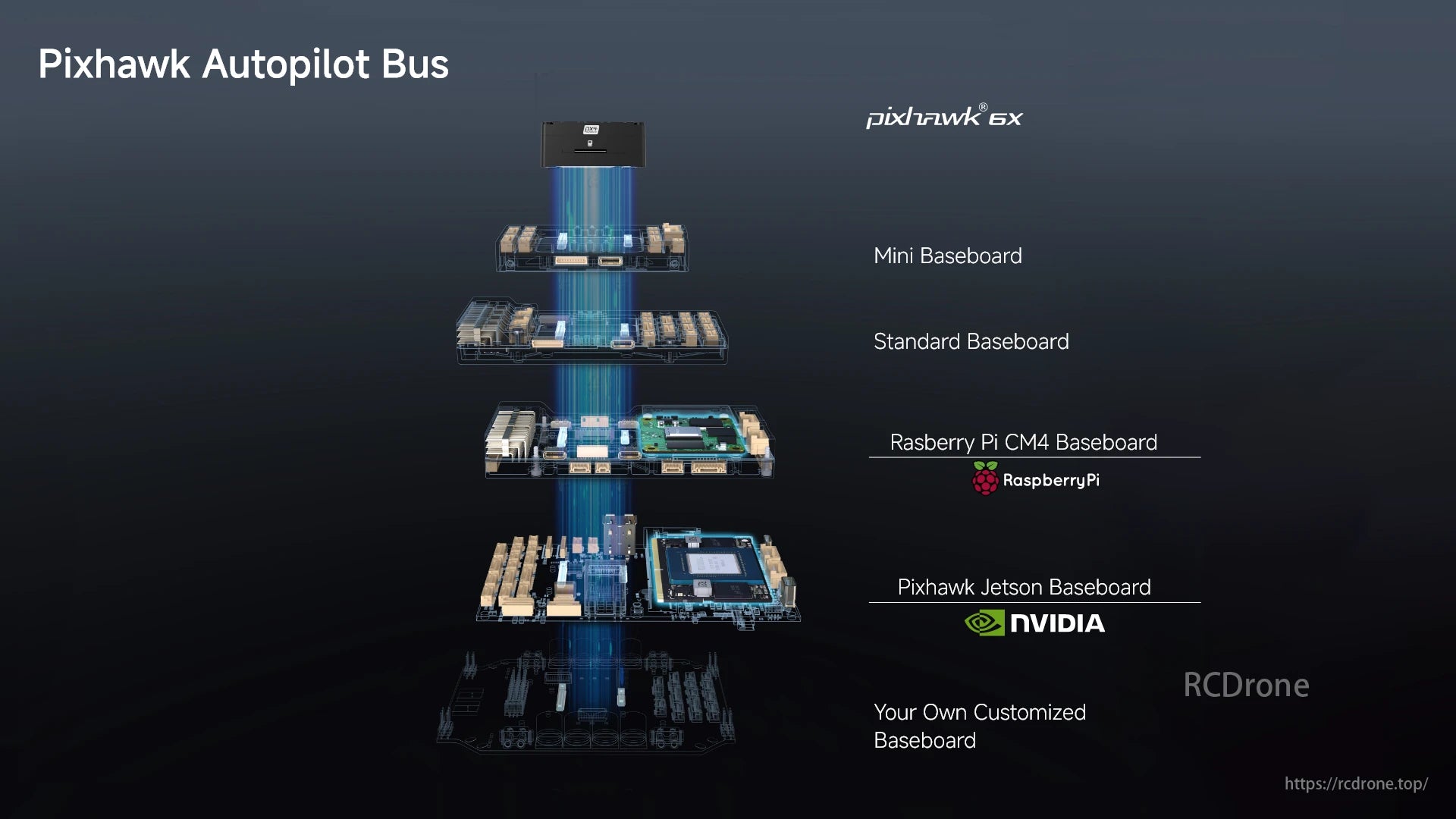
Pixhawk Autopilot Bus omvat Pixhawk 6X, Mini Basisbord, Standaard Basisbord, Raspberry Pi CM4 Basisbord, Jetson Basisbord en aangepaste opties.

Temperatuurcompensatieweerstanden, redundante IMU & barometer, diverse sensortechnologieën en isolatiemateriaal zorgen voor nauwkeurigheid.

Pixhawk Autopilot Bus, STM H753 32-Bit Processor (480 MHz), Invensense ICM45686 IMU met BalancedGyro Technologie, en NXP EdgeLock SE050 Secure Element zijn geïntegreerd in het FMU Bord.
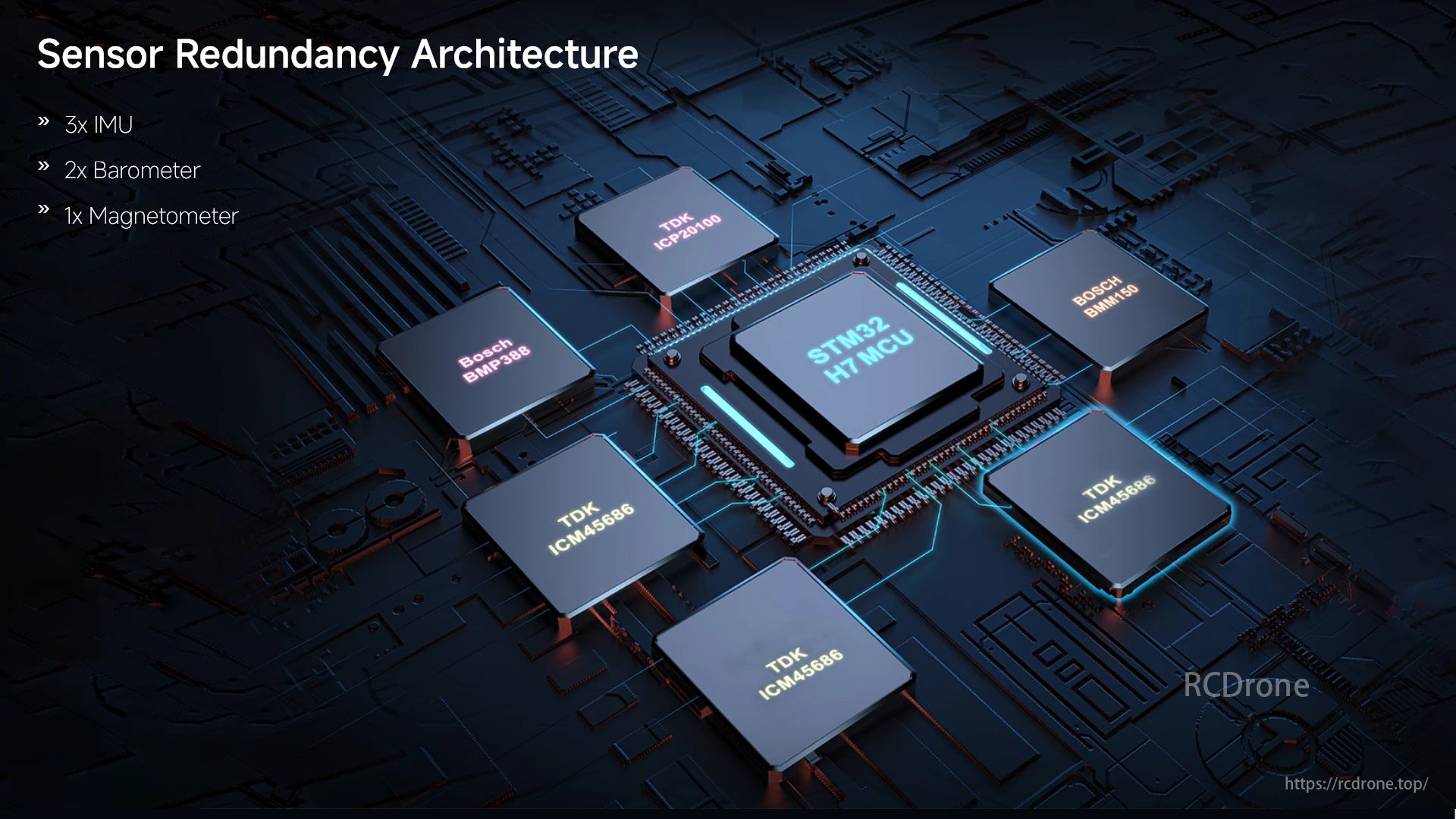
Sensor redundantiearchitectuur met 3x IMU, 2x barometer en 1x magnetometer. Kenmerken STM32 H7 MCU, TDK ICM-45686, Bosch BMP388 en BMM50 sensoren voor verbeterde prestaties.
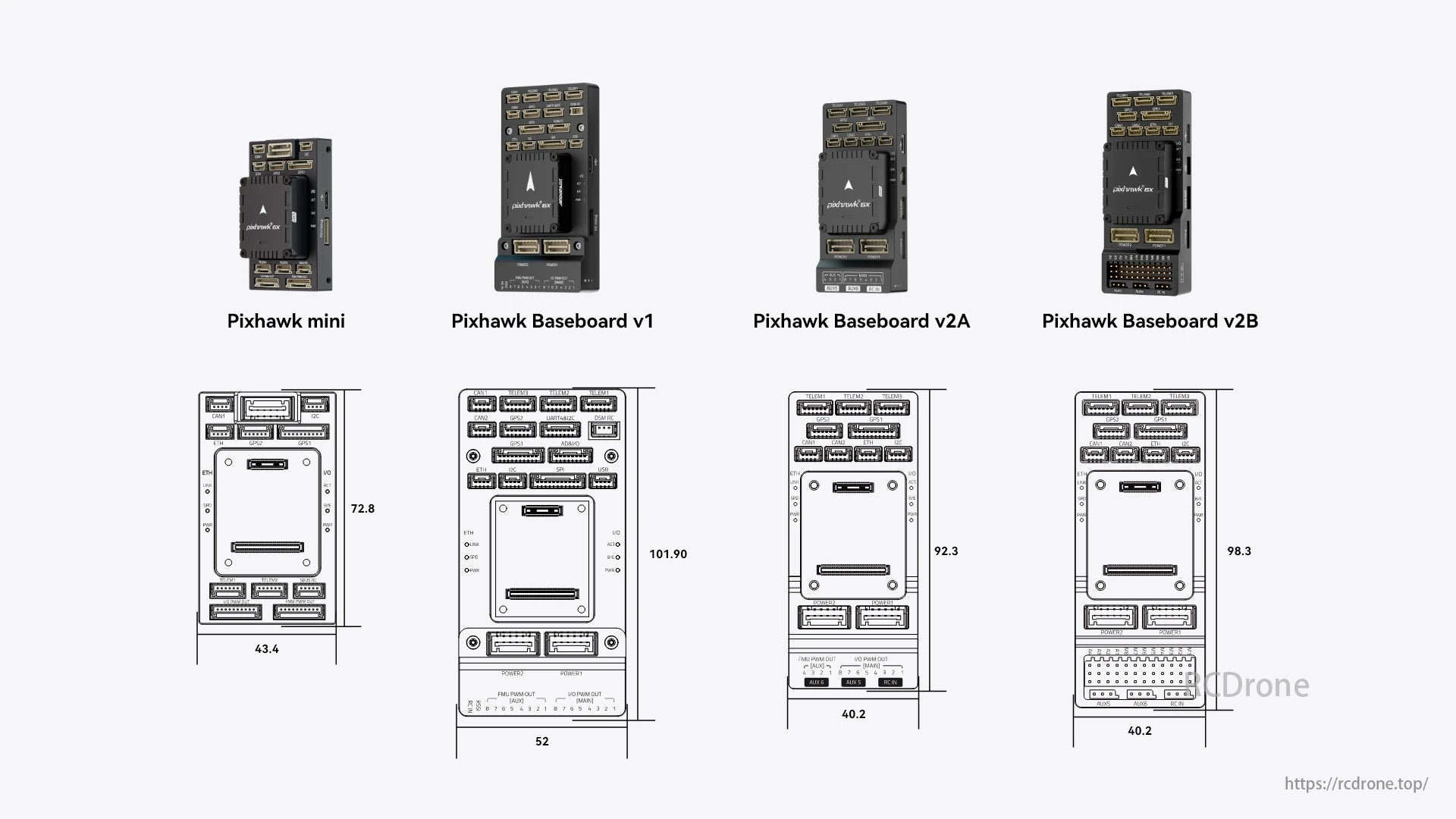
Pixhawk mini, Baseboard v1, v2A en v2B vluchtcontrollers met afmetingen: 43.4x72.8, 52x101.90, 40.2x92.3 en 40.2x98.3 respectievelijk. Verschillende poorten en connectors zijn zichtbaar op elk model.
Related Collections