Holybro Pixhawk 6X Pro stuurautomaat vluchtcontroller
Holybro Pixhawk 6X Pro stuurautomaat vluchtcontroller
HolyBro
Kan beschikbaarheid voor afhalen niet laden
Belangrijk ontwerppunt
- Hoogwaardige ADIS16470 industriële IMU met een hoog dynamisch bereik van de accelerometer (±40 g), perfect voor nauwkeurige bewegingsdetectie in veeleisende UAV-toepassingen
- Geheel nieuw geavanceerd duurzaam trillingsisolatiemateriaal met resonantiefrequentie in het hogere spectrum, ideaal voor industriële en commerciële dronetoepassingen
- Driedubbele redundante IMU en dubbele redundante barometer op afzonderlijke bussen
- Hoogwaardige STM32H753-processor
- Modulaire vluchtcontroller: gescheiden IMU, FMU en basissysteem
- Veiligheidsgericht ontwerp omvat sensoren van verschillende fabrikanten en modelreeksen
- Onafhankelijke LDO voedt elke sensor met onafhankelijke vermogensregeling.
- Ethernet-interface voor snelle integratie van missiecomputers. Transformatorloos kan worden bereikt door gebruik te maken van 50 Ohm afsluitweerstanden bij het doelapparaat (AN2190 50 Ohm-afsluiting).
- Temperatuurgecontroleerde IMU-kaart, die een optimale werktemperatuur van IMU's mogelijk maakt
- Hardware-omschakelbare 3,3V of 5V signaalmodus (vereist aanpassing van het basisbord)
Opmerking:
- Voor de werking van dit product is een FC-module + een plint vereist. Een FC-module of een plint op zichzelf functioneert niet.
Specificatie
Processoren en sensoren
- FMU-processor: STM32H753
- 32 Bit Arm® Cortex®-M7, 480MHz, 2MB flashgeheugen, 1MB RAM
- IO-processor: STM32F103
- 32-bits Arm® Cortex®-M3, 72 MHz, 64 KB SRAM
- Sensoren aan boord
- Versnellingsbak/gyro: ADIS16470
- ±40 gram, Trillingsgeïsoleerde, industriële IMU
- Versnellingsbak/gyro: IIM-42652
- ±16 gram, Trillingsgeïsoleerde, industriële IMU
- Accel/Gyro: ICM-45686 met BalancedGyro™-technologie
- ±32g, vast gemonteerd
- Barometer: ICP20100
- Luchtdruk: BMP388
- Magazijn: BMM150
- Versnellingsbak/gyro: ADIS16470
- NXP EdgeLock SE050 Plug & Trust hardwarebeveiligingselement
Elektrische gegevens
- Spanningswaarden:
- Maximale ingangsspanning: 6V
- USB-voedingsingang: 4,75~5,25V
- Servo Rail-ingang: 0~36V
- Huidige beoordelingen:
- Telem1 uitgangsstroombegrenzer: 1,5A
- Alle andere poorten gecombineerde uitgangsstroombegrenzer: 1,5A
- Bedrijfstemperatuur: -25-85°C
Mechanische gegevens
- Afmetingen
- Vluchtcontrollermodule: 38,8 x 31,8 x 30,1 mm
- Standaard plint: 52,4 x 102 x 16,7 mm (Aluminium)
- Mini-plint: 43,4 x 72,8 x 14,2 mm
- Gewicht
- Vluchtcontrollermodule: 50g
- Standaard plint: 72,5 g (Aluminium)
- Mini-plint: 26.5 gram
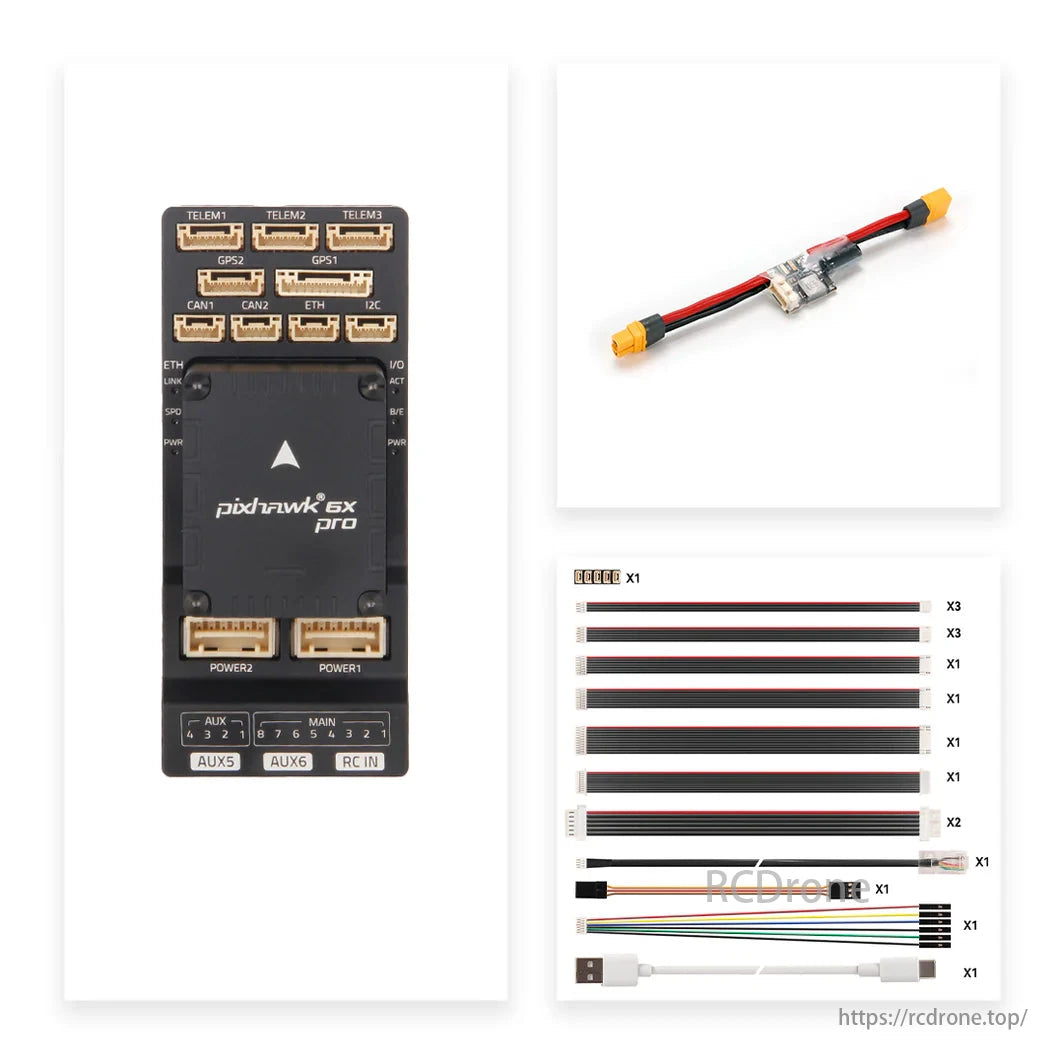
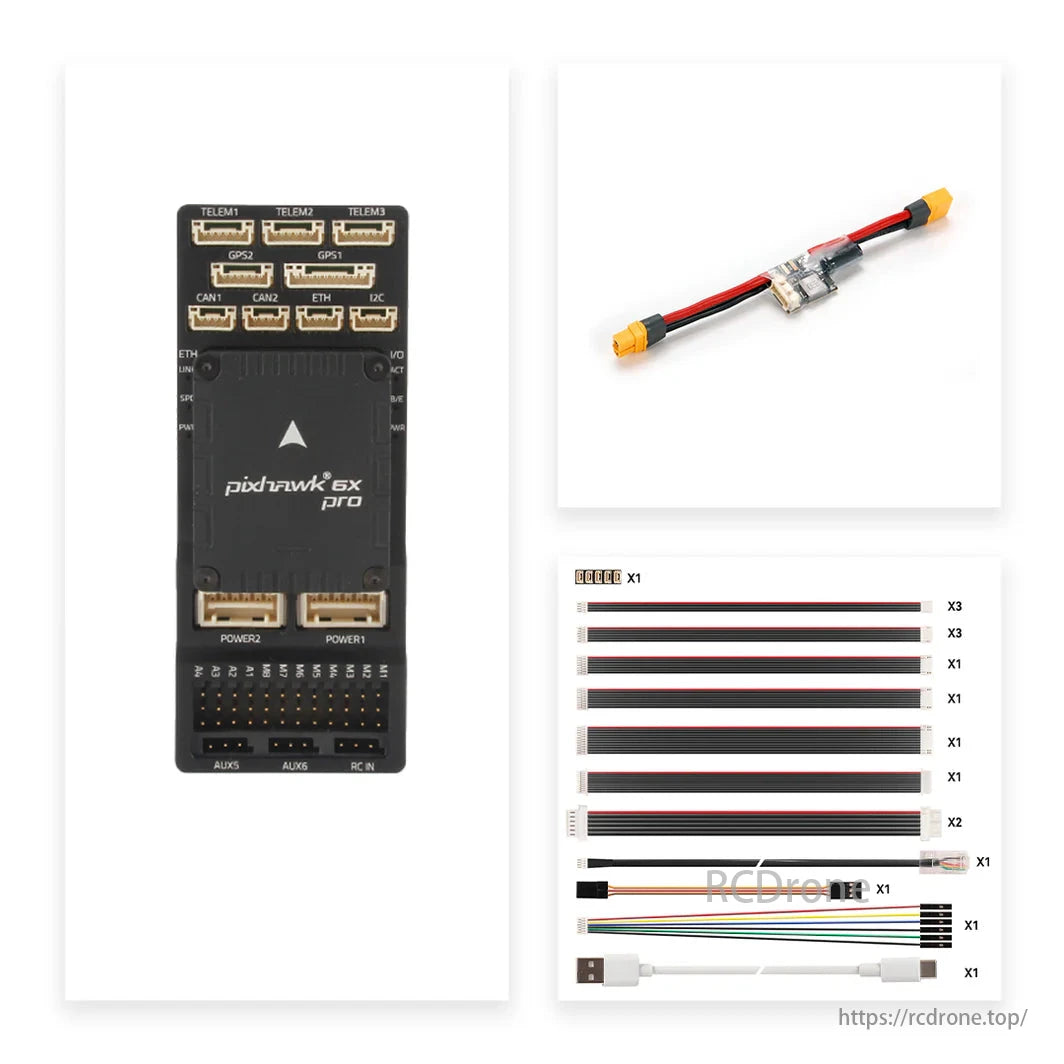
Pakket omvat
FC-module bevat alleen:
- Pixhawk 6X Pro Vluchtcontrollermodule
- Optionele IMU-dempingvervanging (zachter dan vooraf geïnstalleerd)
Standaard V2A/V2B/Mini Set bevat:
- Pixhawk 6X Pro Vluchtcontrollermodule
- Pixhawk Standaard Plint v2A/ Pixhawk Standaard Plint v2B/ Mini plint
- PM02D HV-voedingsmodule
- Kabelset
Details
Gloednieuw trillingsisolatieontwerp
Dit nieuwe trillingsisolatieontwerp maakt gebruik van wisselstroomop maat geformuleerd duurzaam isolatiemateriaal op siliconenbasis in plaats van het traditionele schuimontwerp. BGecertificeerd door uitgebreide R&D en testen, biedt het optimale IMU-dempingseigenschappen met resonantiefrequentie in het hogere spectrum, perfect voor industriële en commerciële drones
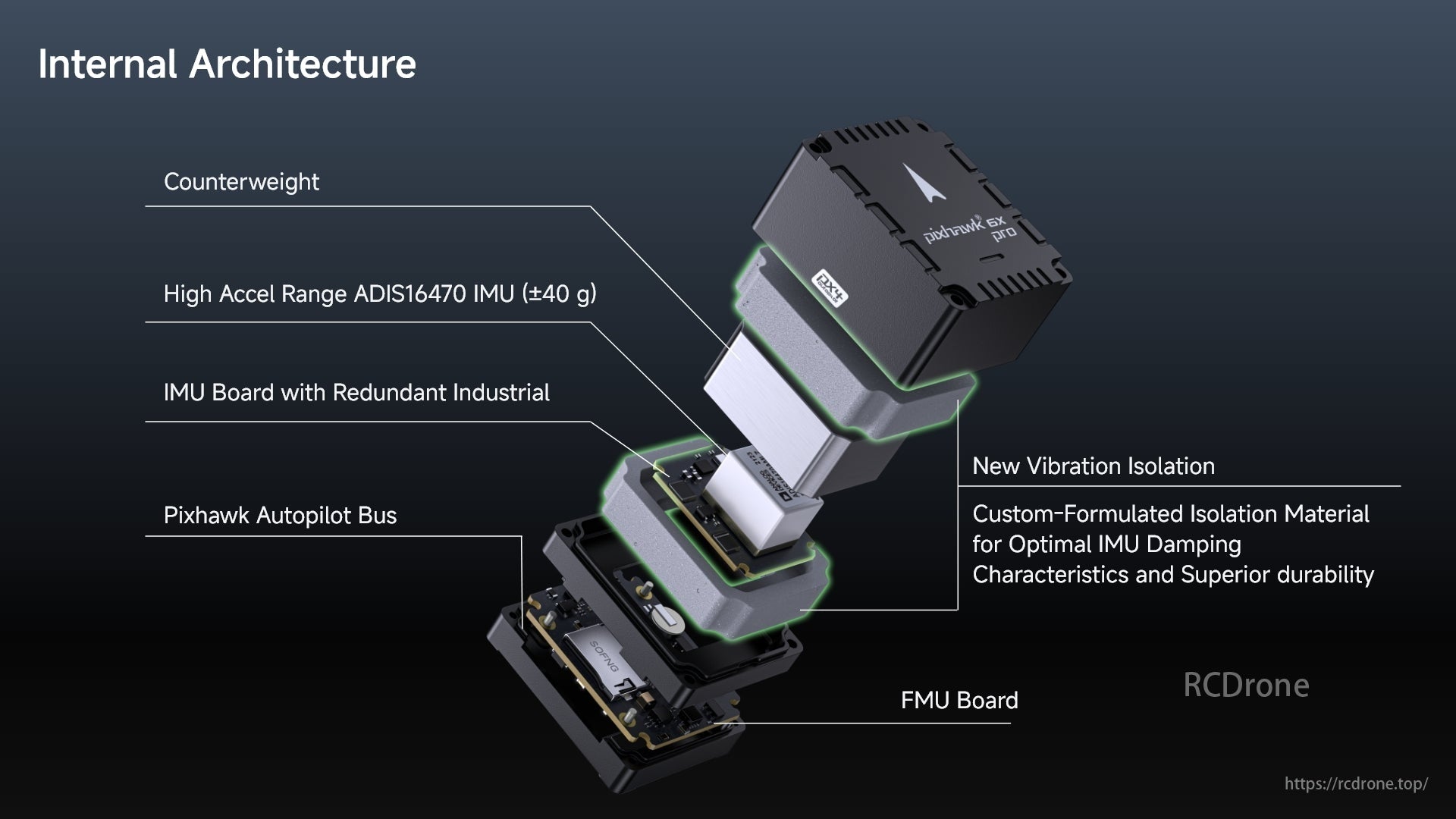
Interne architectuur: contragewicht, ADIS16470 IMU met hoog acceleratiebereik (±40 g), redundante industriële IMU-kaart, Pixhawk Autopilot-bus, nieuwe trillingsisolatie, FMU-kaart.
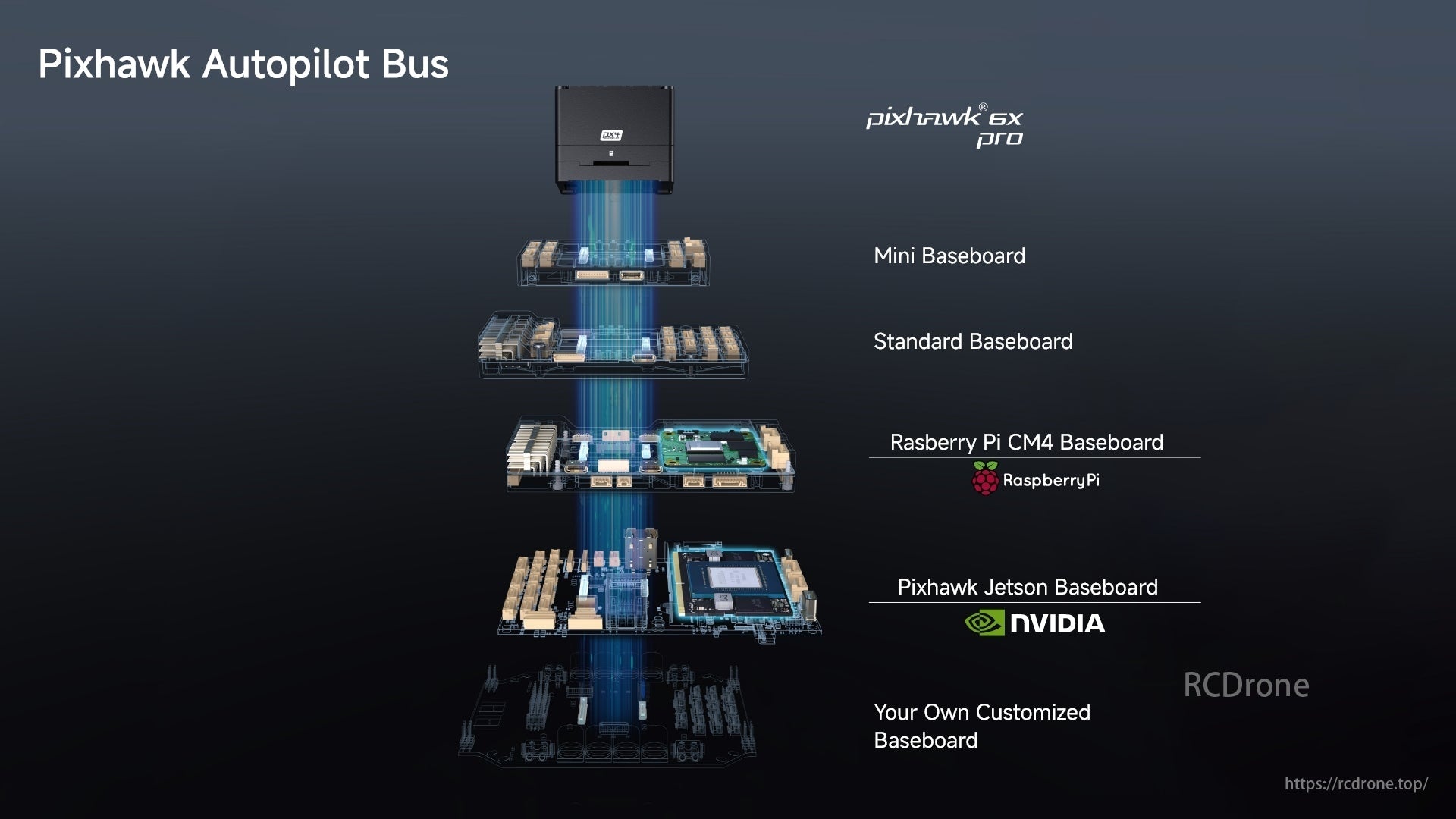
Pixhawk Autopilot Bus verbindt Mini, Standard, Raspberry Pi CM4, Jetson Baseboards en aangepaste baseboards.
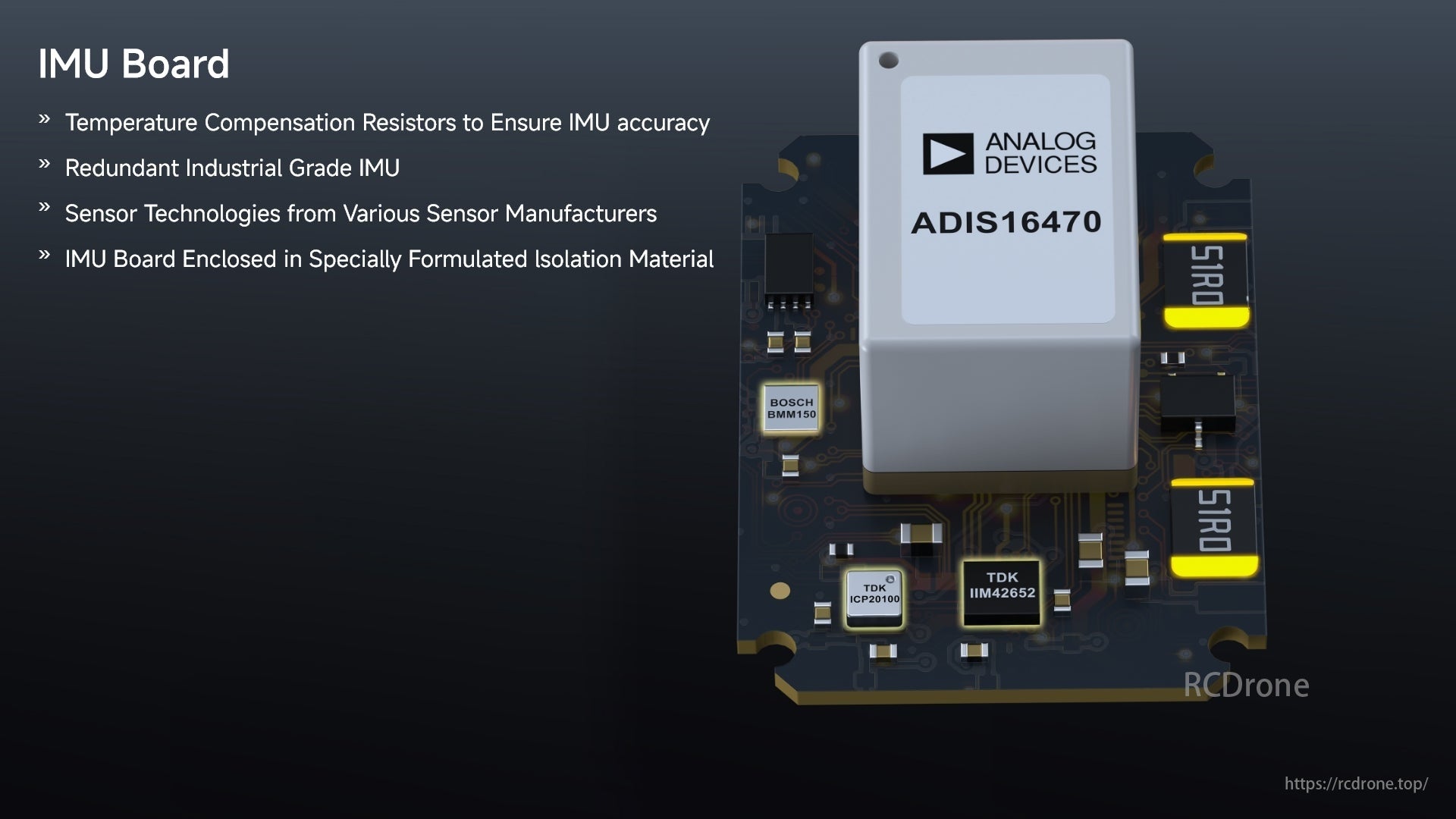
Het IMU-bord is voorzien van temperatuurcompensatieweerstanden, een redundante IMU van industriële kwaliteit, sensoren van verschillende fabrikanten en is omgeven door isolatiemateriaal.
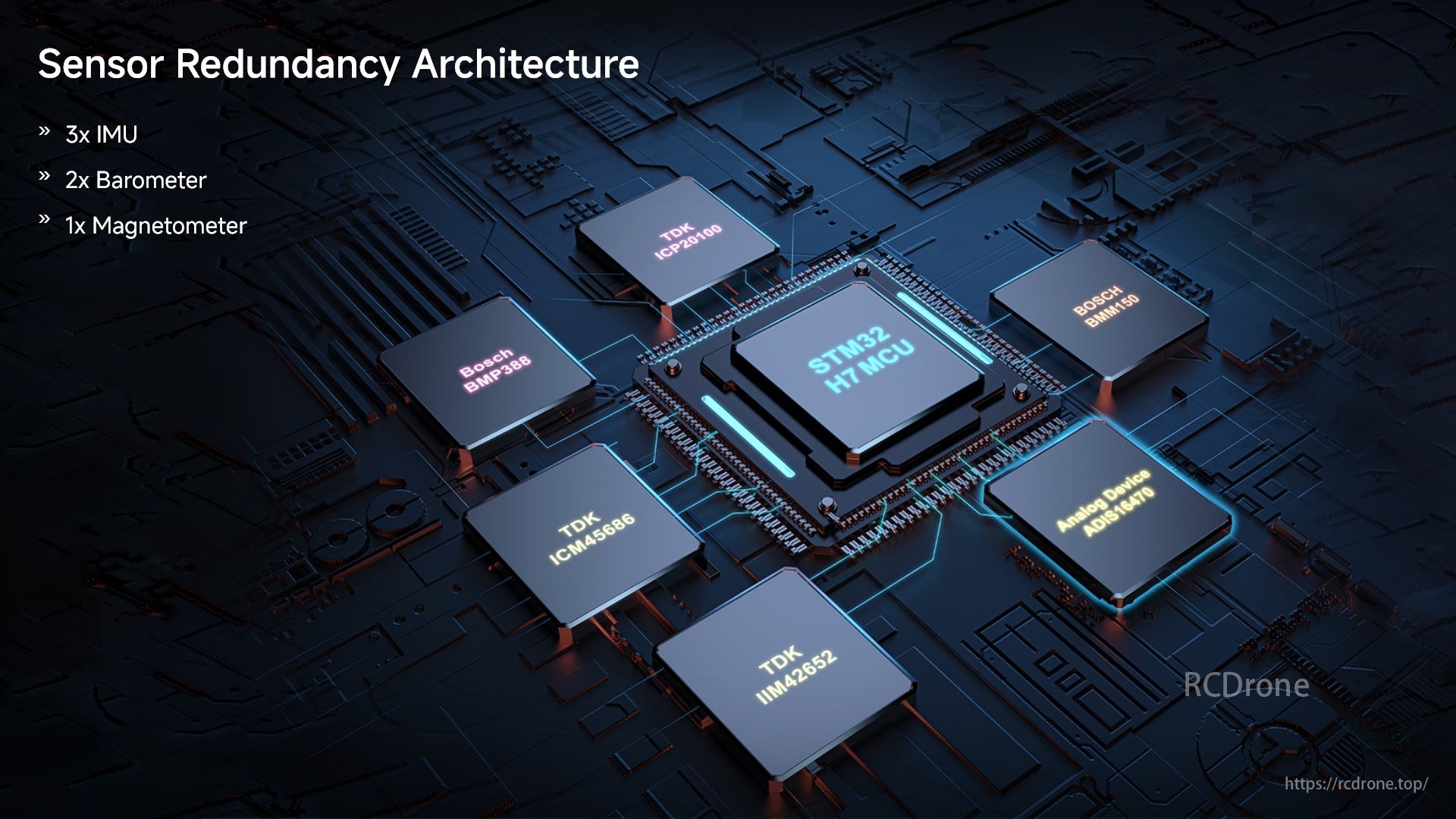
De sensorredundantiearchitectuur omvat 3x IMU, 2x barometer en 1x magnetometer, met componenten zoals STM32 H7 MCU, TDK IC's, Bosch BMP388 en Analog Devices ADIS16470.
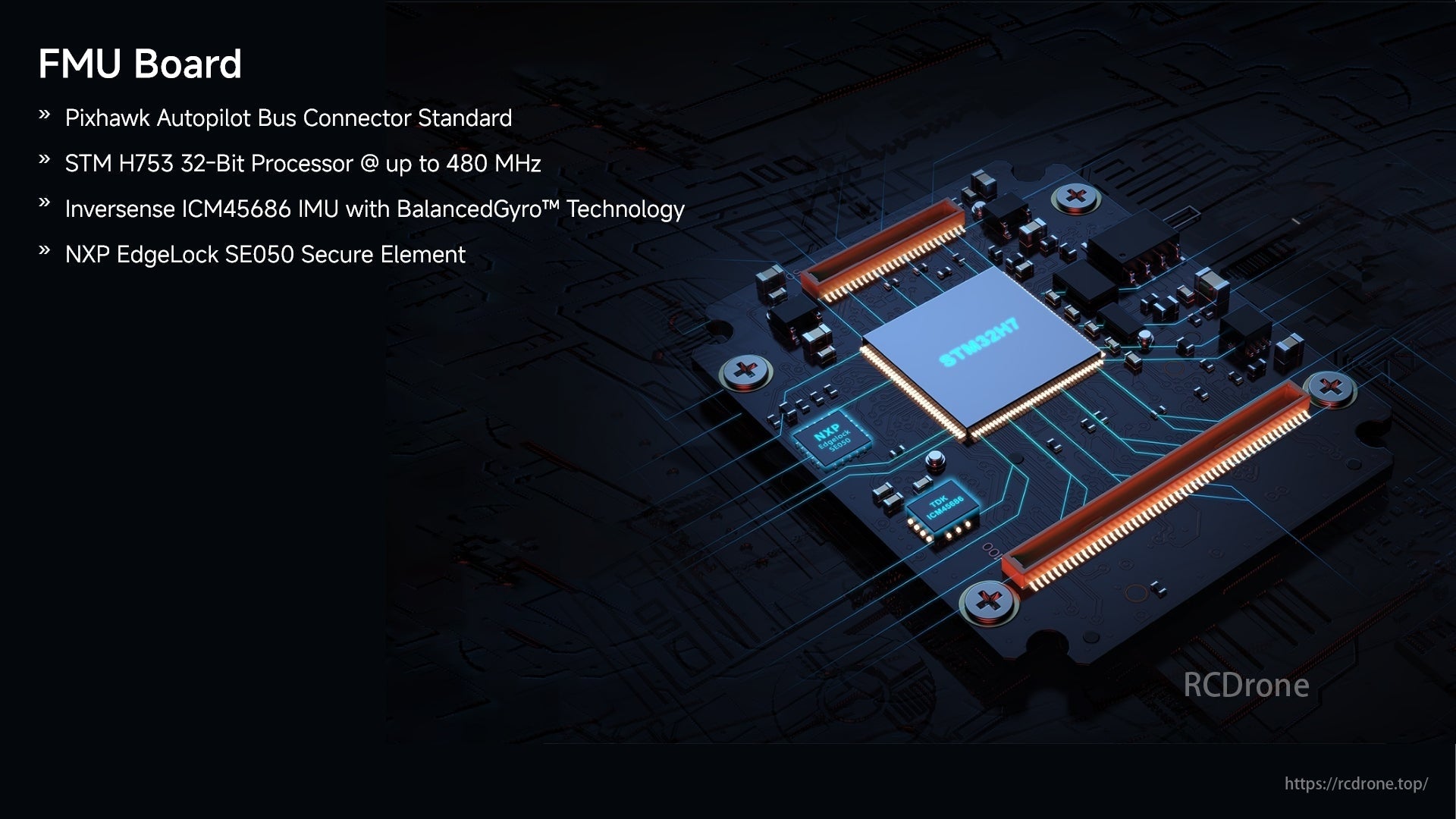
Het FMU-bord is voorzien van Pixhawk Autopilot Bus Connector Standard, STM H753 32-bits processor tot 480 MHz, Inversense ICM45686 IMU met BalancedGyro Technology en NXP EdgeLock SE050 Secure Element.
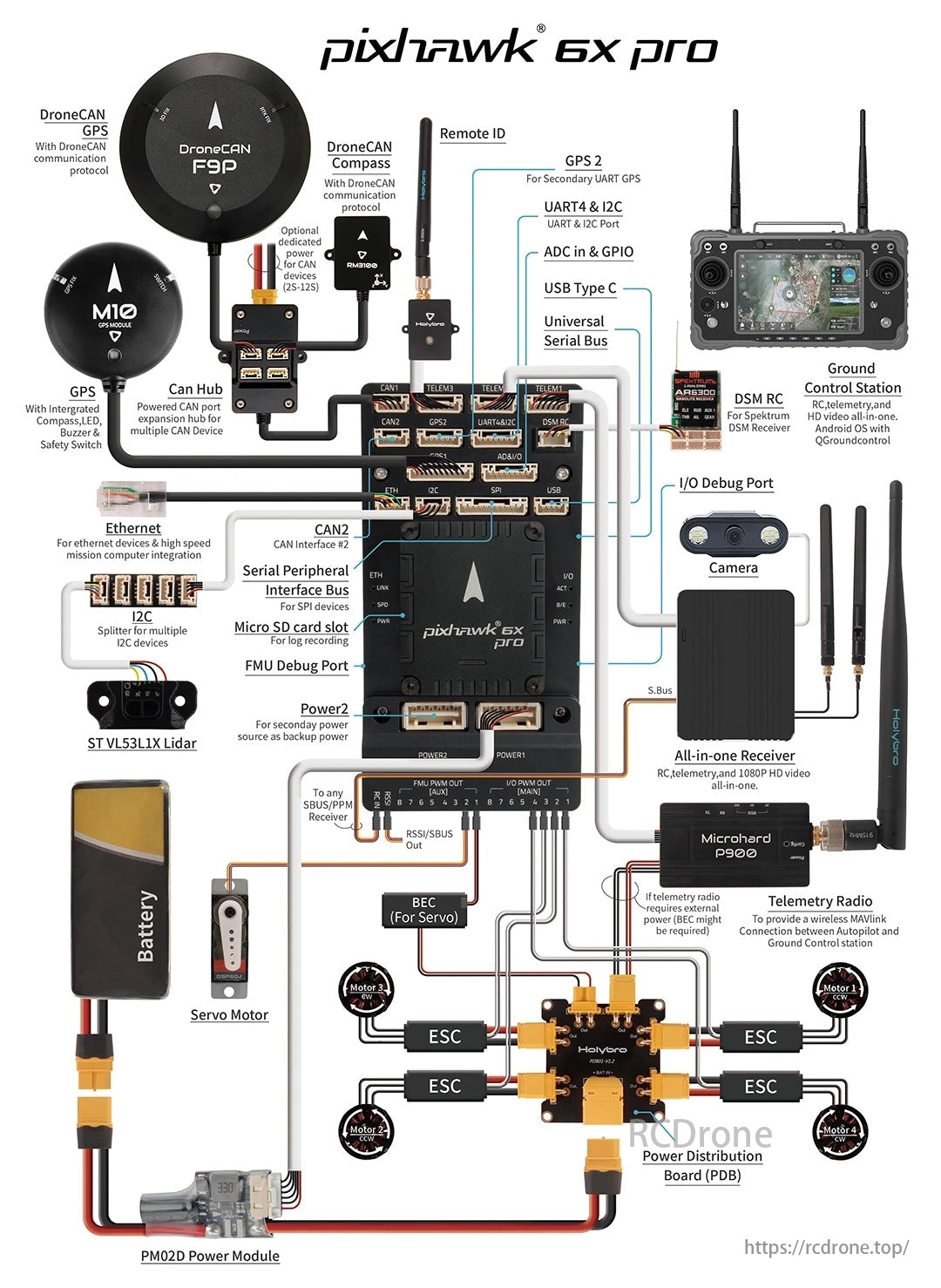
Pixhawk 6X Pro-diagram illustreert verbindingen voor het automatische pilootsysteem van een drone, inclusief GPS-modules, kompas, grondcontrolestation, camera, telemetrieradio, ESC's, motoren en stroomverdeelbord. Verschillende interfaces zoals CAN, I2C, UART en USB worden gebruikt voor communicatie tussen componenten.