Holybro Pixhawk 6X-RT - (Developer Edition) Autopilot Flight Controller Standaard / Miniset
Holybro Pixhawk 6X-RT - (Developer Edition) Autopilot Flight Controller Standaard / Miniset
HolyBro
Kan beschikbaarheid voor afhalen niet laden
Overzicht
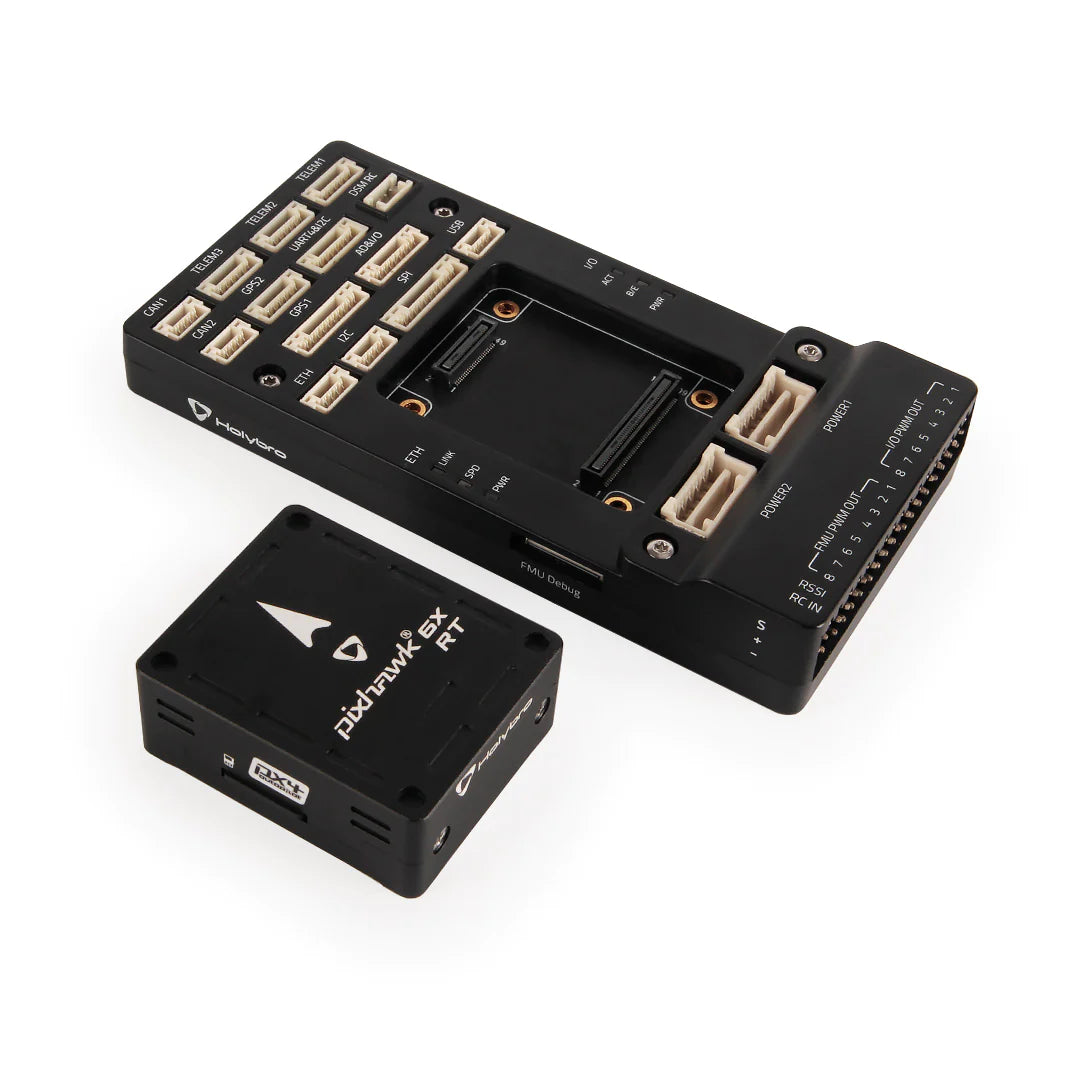
De Pixhawk 6X-RT is gebaseerd op de Pixhawk® FMUv6X-RT Open Standaard en de Pixhawk® Autopilot Bus Standaard. Het wordt geleverd met PX4 Autopilot® vooraf geïnstalleerd. In de Pixhawk 6X-RT-vluchtcontroller vindt u een op NXP gebaseerde i.MXRT1176 MCU, gecombineerd met sensortechnologie van Bosch® en InvenSense®, waardoor u flexibiliteit en betrouwbaarheid krijgt bij het besturen van elk autonoom voertuig.
De i.De MXRT1176-microcontroller bevat een Arm® Cortex-M7 op 1 GHz en een Cortex-M4 op 400 MHz. Het heeft 2 MB SRAM en 64 MB Octal SPI Flash. Dankzij de bijgewerkte verwerkingskracht kunnen ontwikkelaars productiever en efficiënter zijn met hun ontwikkelingswerk, waardoor complexe algoritmen en modellen mogelijk zijn.
Het omvat hoogwaardige, geluidsarme IMU's die zijn ontworpen voor betere stabilisatie, en heeft drievoudig redundante IMU's en dubbel redundante barometers op afzonderlijke bussen. Wanneer de Autopilot een sensorstoring detecteert, schakelt het systeem naadloos over naar een andere om de betrouwbaarheid van de vluchtbesturing te behouden. Een onafhankelijke LDO voedt elke sensorset met onafhankelijke vermogensregeling. Een trillingsisolatiesysteem om hoogfrequente trillingen weg te filteren en geluid te verminderen om nauwkeurige metingen te garanderen, waardoor voertuigen betere algemene vliegprestaties kunnen bereiken. Een geïntegreerde Microchip Ethernet PHY, snelle communicatie met missiecomputers via Ethernet is nu mogelijk.
De Pixhawk 6X-RT is perfect voor ontwikkelaars in onderzoekslaboratoria van bedrijven, startups, academici (onderzoek, professoren, studenten) en commerciële toepassingen. Deze vluchtcontroller is compatibel met elk basisbord dat gebruikmaakt van de Pixhawk Autopilot-bus, zoals het Pixhawk Baseboard, Pixhawk Mini Baseboard en Pixhawk RPi CM4 Baseboard.
Belangrijke ontwerppunten
- Hoogwaardige dual-core i.MXRT1176-processor met Cortex-M7 @ 1GHz – Cortex-M4 @ 400MHz
- Modulaire vluchtcontroller: gescheiden IMU-, FMU- en basissysteem verbonden door een 100-pins en een 50-pins Pixhawk® Autopilot Bus-connector.
- Redundantie: 3x IMU-sensoren en 2x barometersensoren op aparte bussen
- Drievoudige redundantiedomeinen: volledig geïsoleerde sensordomeinen met afzonderlijke bussen en afzonderlijke stroomregeling
- Trillingsisolatiesysteem om hoogfrequente trillingen weg te filteren en ruis te verminderen om nauwkeurige metingen te garanderen
- Ethernetinterface voor snelle integratie van missiecomputers
- IMU's worden op temperatuur gehouden door ingebouwde verwarmingsweerstanden, waardoor een optimale werktemperatuur van IMU's mogelijk is
- Hardware beveiligd element NXP EdgeLock SE051 een uitbreiding op de alom vertrouwde EdgeLock SE050 Plug & Trust beveiligde elementfamilie, ondersteunt applet-updates in het veld en levert bewezen beveiliging gecertificeerd volgens CC EAL 6+, met AVA_VAN.5 tot OS-niveau, voor krachtige bescherming tegen de meest recente aanvalsscenario's. Eg om operator-ID veilig op te slaan
Opmerking:
- Deze ontwikkelaarseditie voor early adopters terwijl we vliegtesturen blijven verzamelen
- Deze vluchtcontroller wordt momenteel alleen ondersteund in PX4 Flight Stack. (Firmwaredoel: FMUv6xrt). Het wordt niet ondersteund in Ardupilot.
- Deze vluchtcontroller maakt gebruik van een digitale voedingsmodule (hetzelfde als Pixhawk 6X, de volledige lijst kun je hier vinden) Vergelijkingstabel voedingsmodules
Specificatie
-
MCU: ik.MXRT1176
-
Cortex-M7 @ 1GHz
-
Cortex-M4 @ 400MHz
-
2 MB SRAM
-
64 MB Octale SPI-flitser
-
IO-processor: STM32F103
-
32-bits Arm® Cortex®-M3, 72 MHz, 64 KB SRAM
-
Geïntegreerde sensoren
-
Accel/Gyro: BMI088
-
Accel/Gyro: ICM-42670-P
-
Accel/Gyro: ICM-42686-P
-
Mag: BMM150
-
Barometer: 2x BMP388
- Hardware beveiligd element
- NXP EdgeLock SE051C2
- SDHC-interface
- 12-kanaals PWM
- 8x UART
- 4x I2C
- 6x SPI
- 3x CAN-FD
- RMII 100M Ethernet
- USB
- Open-source software inschakelen
- PX4-stuurautomaat
- NuttX RTOS
- Zephyr RTOS
SKU20257 standaardset/ SKU258 miniset bevat:
-
Pixhawk 6X-RT vluchtcontrollermodule
-
Pixhawk standaardbasis/Pixhawk minibasis
- PM02D HV-voedingsmodule
-
Kabelset
Referentielink:
- Instructie voor het flashen van firmware (Github)
- PX4 op de NXP IMXRT1176 1 GHz MCU - Presentatiedia's door NXP
- ik.MX RT1176 – productpagina 1 GHz crossover MCU met Arm® Cortex®-kernen
- EdgeLock® SE051: Beproefde, gebruiksvriendelijke IoT-beveiligingsoplossing met ondersteuning voor updatemogelijkheden en aangepaste applets