Holybro Pixhawk Jetson-plintbundel met 6X / 6X Pro en NVIDIA Jetson
Holybro Pixhawk Jetson-plintbundel met 6X / 6X Pro en NVIDIA Jetson
HolyBro
Kan beschikbaarheid voor afhalen niet laden
Overzicht
De Holybro Pixhawk Jetson-plint is ontworpen op basis van de Pixhawk Autopilot Bus (PAB) open-source specificatie en integreert naadloos met de NVIDIA Jetson Orin NX/Nano-dragerbord. De PAB-vormfactor maakt compatibiliteit met elke PAB-vluchtcontroller mogelijk, inclusief de Pixhawk 6XDit bord combineert de rekenkracht van NVIDIA-jetson met de vluchtcontrolemogelijkheden van Pixhawkwaardoor het ideaal is voor geavanceerde autonome toepassingen.
Belangrijkste kenmerken
-
Uniform systeem: Combineert Pixhawk En NVIDIA-jetson op één bord.
-
Naadloze connectiviteit: Jetson en Pixhawk communiceren via UART-, CAN- en Ethernet-switch.
-
Brede compatibiliteit: Ondersteunt Jetson Orin NX en Orin Nano.
-
Snelle uitbreiding: Functies 2x M.2-sleutelsleuven voor WiFi/Bluetooth en NVMe SSD.
-
Pixhawk 6X-integratie: Uitgerust met ICM-45686-sensoren voor verbeterde vluchtcontrole.
Processoren en sensoren
FMU-processor:
-
STM32H753
-
32-bits ARM Cortex-M7, 480 MHz
-
2 MB Flash-geheugen, 1 MB RAM
IO-processor:
-
STM32F103
-
32-bits ARM Cortex-M3, 72 MHz
-
64 KB SRAM
Onboard-sensoren (Rev8)
-
Versnellingsmeter/gyro: 3x ICM-45686 (met BalancedGyro™-technologie)
-
Barometer: ICP20100 en BMP388
-
Magnetometer: BMM150
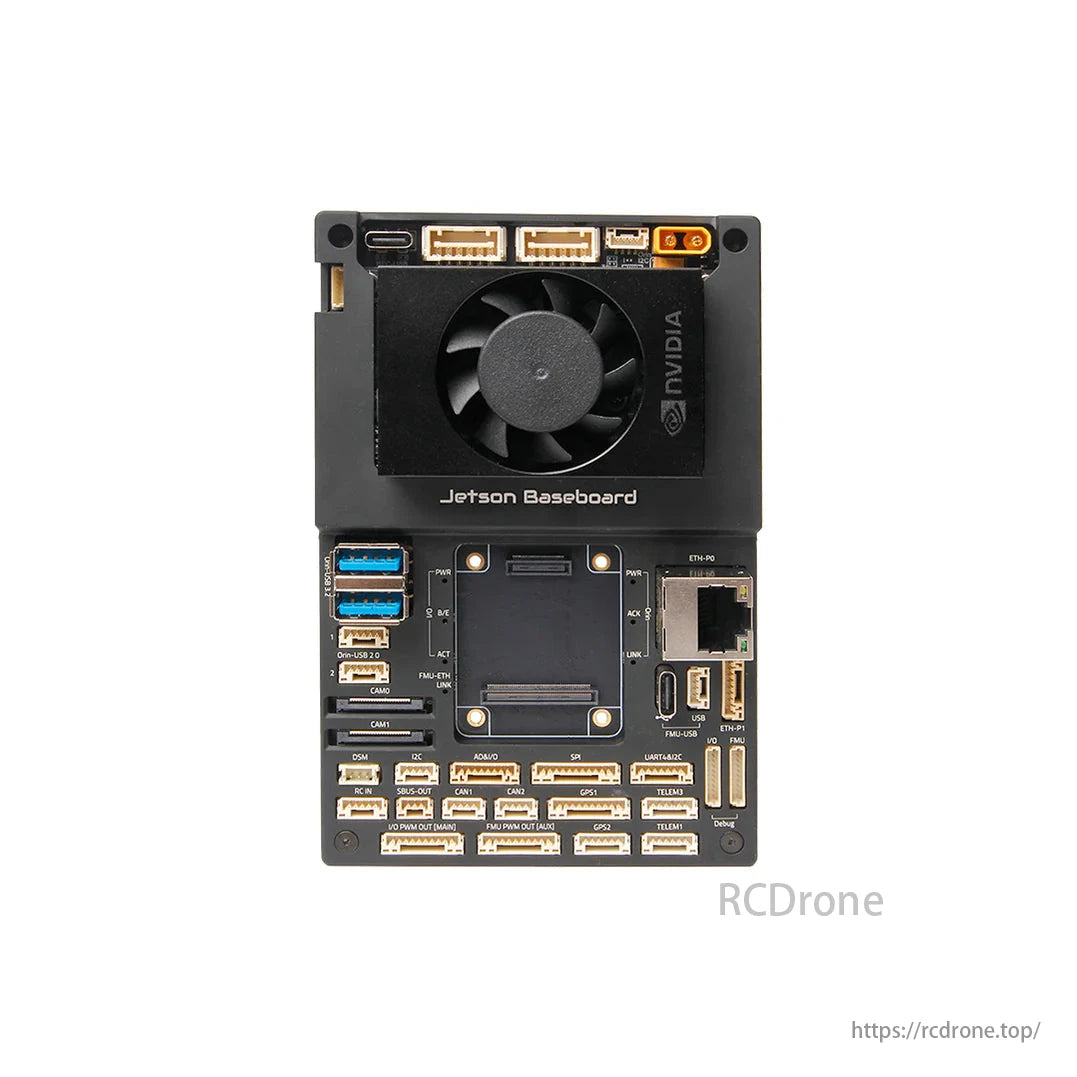
Baseboard-poorten en connectiviteit
Jetson-connectoren
-
2x Gigabit Ethernet-poorten (Verbonden met Jetson & Autopilot via RTL8367S Ethernet-switch)
-
2x MIPI CSI-camera-ingangen (4 rijstroken elk, 22-pins Raspberry Pi Cam FFC)
-
2x USB 3.0-hostpoorten (USB-A, 5A stroomlimiet)
-
2x USB 2.0 Hostpoorten (5-pins JST-GH)
-
USB 2.0 voor foutopsporing (USB-C)
-
Mini HDMI-uitgang
-
2x M.2-sleuven:
-
Sleutel M (2242) voor NVMe SSD (PCIEx4)
-
Sleutel E (2230) voor WiFi/BT (PCIEx2, UART, USB, I2S)
-
-
CAN-poort (Verbonden met Automatische piloot CAN2, 4-pins JST-GH)
-
SPI-, I2C-, I2S-, UART-poorten (Diverse JST-GH connectoren)
-
Ventilator-voedingspoort
-
Stroomverbruik: XT30-connector, 7-21V (3S-4S)
-
UBEC 12A (3-14S) Aanbevolen voor >4S-toepassingen
Autopilot-connectoren
-
Pixhawk Autopilot-businterface: 100-pins en 50-pins Hirose DF40
-
Redundante digitale voedingsmodule-ingangen
-
Ondersteuning voor I2C Power Monitor
-
GPS- en veiligheidsschakelaarpoorten: 10-pins en 6-pins JST-GH
-
2x CAN-poorten (4-pins JST-GH)
-
3x Telemetriepoorten (JST-GH, één aangesloten op Jetson's UART1)
-
16 PWM-uitgangen (2x 10-pins JST-GH)
-
USB 2.0 (USB-C en 4-pins JST-GH)
-
DSM-ingang (3-pins JST-ZH, 1,5 mm spoed)
-
RC-ingang (PPM/SBUS, 5-pins JST-GH)
-
SPI-poort voor externe sensorbus (SPI5, 11-pins JST-GH)
-
2x Debug-poorten (FMU & IO, 10-pins JST-SH)
Stroomvereisten
-
Ingangsspanning: 7-21V (3S-4S) via XT30-connector
-
Minimale vermogensvereiste: 8V/3A (varieert afhankelijk van randapparatuur)
-
Ondersteunt externe UBEC 12A (3-14S) voor redundantie en toepassingen met hogere spanning
-
Ingebouwde overspanningsbeveiliging
Afmetingen en gewicht
-
Bordformaat: 126x80x38mm (zonder Jetson en vluchtcontroller)
-
Gewicht: 203.2 gram (Inclusief Jetson, Heatsink, Flight Controller, SSD, Wi-Fi Module)
UBEC-12A-specificaties
-
Ingangsspanning: 3~14S (XT30)
-
Uitgangsspanning: 6,0V/7,2V/8,0V/9,2V (7,2V aanbevolen voor Jetson)
-
Continue uitgangsstroom: 12A
-
Burst-uitgangsstroom: 24A
-
Maat: 48 x 33,6 x 16,3 mm
-
Gewicht: 47,8 gram
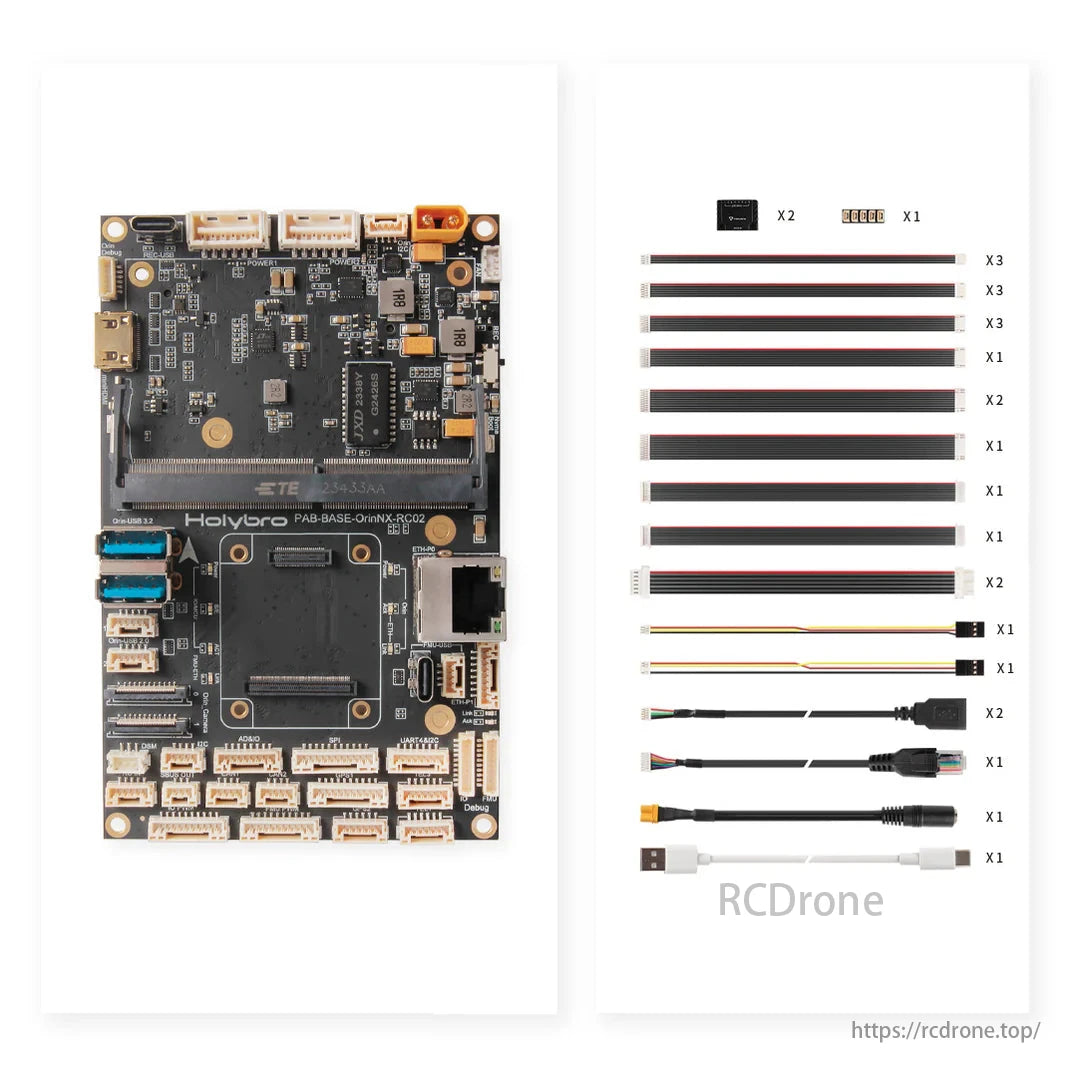
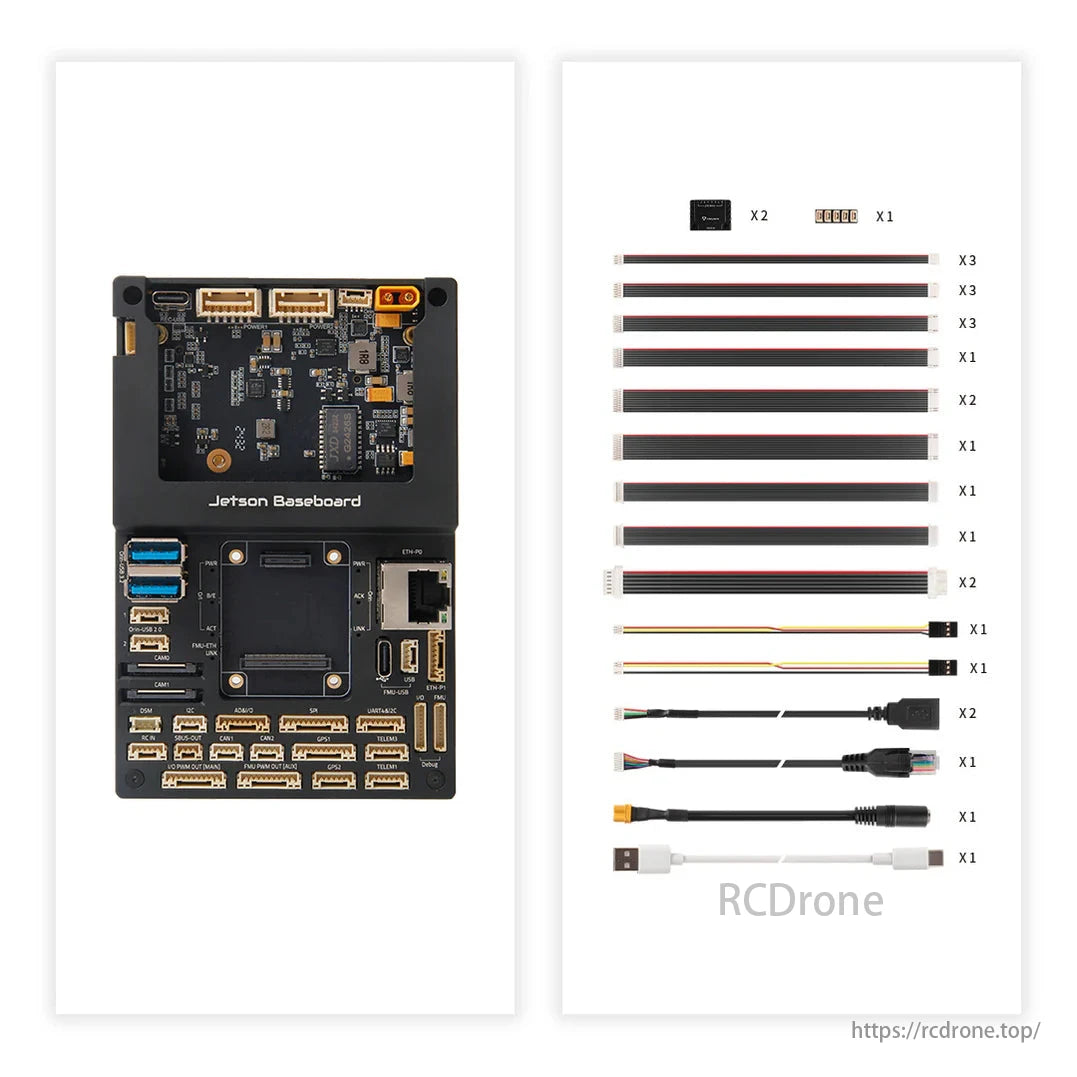
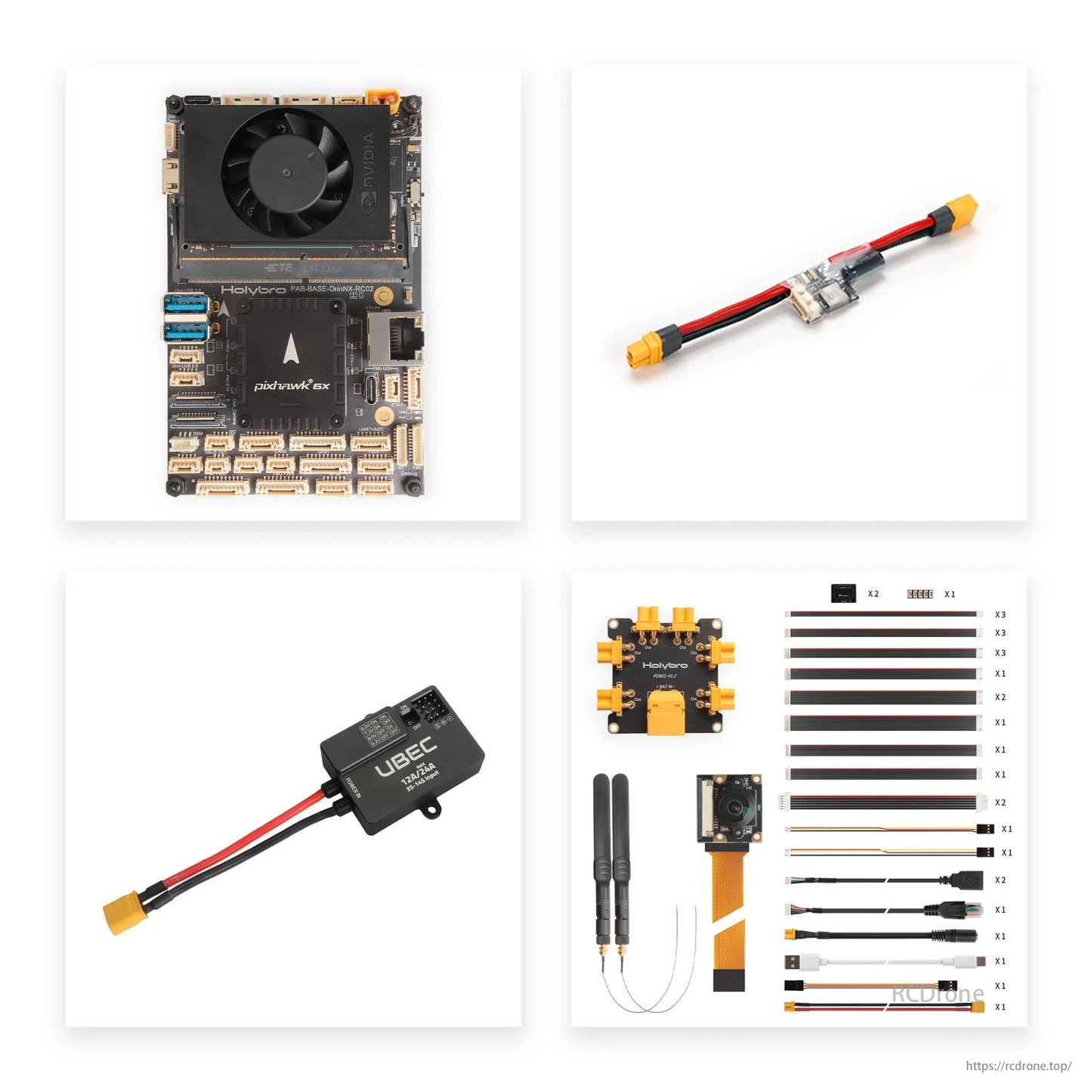
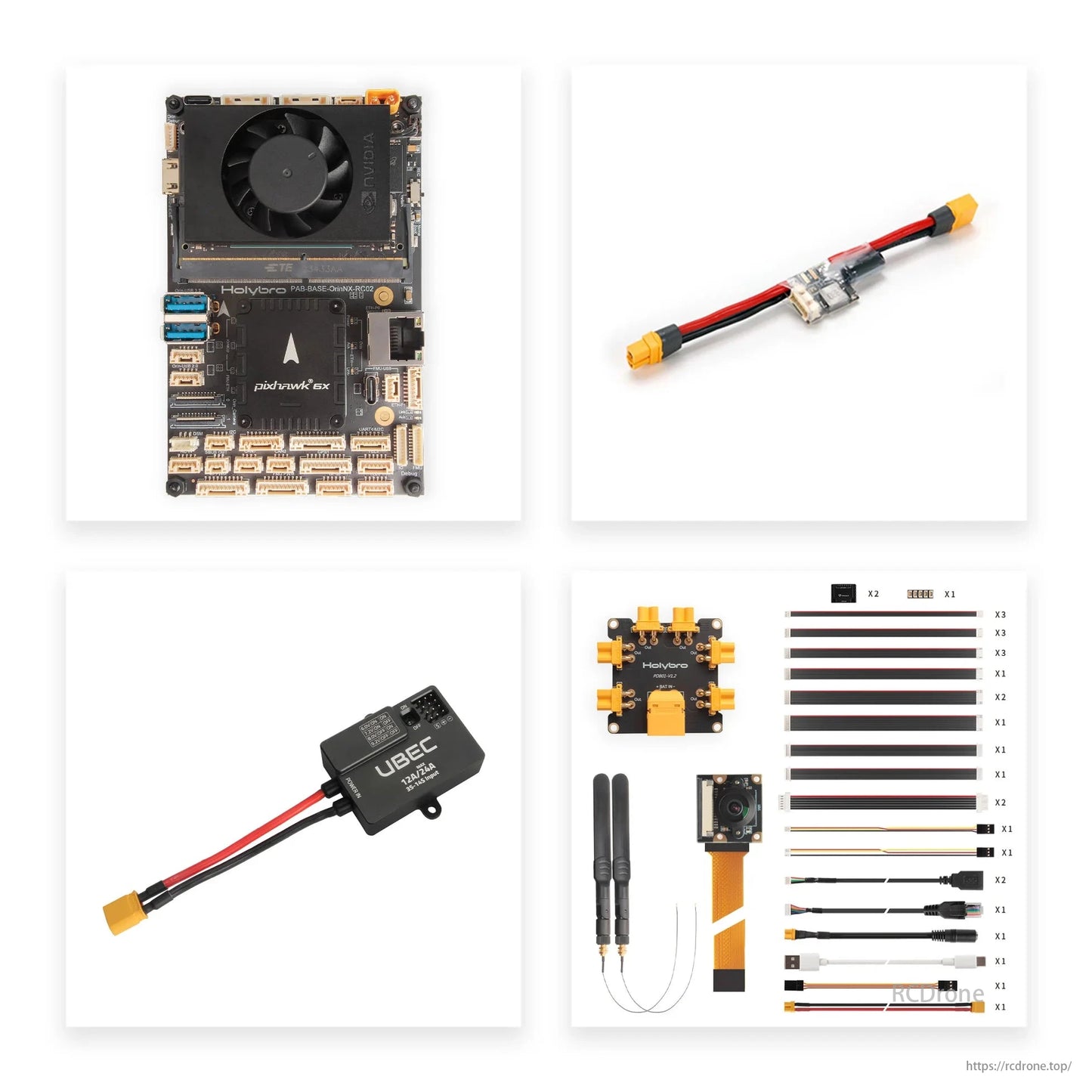
Inhoud van het pakket
Pixhawk 6X-bundel
-
Pixhawk 6X (ICM-45686) Vluchtcontrollermodule
-
Pixhawk Jetson Orin-plint
-
Nvidia Orin NX (16 GB RAM) / Orin Nano (4 GB RAM) met koellichaam en ventilator
-
SSD-schijf: Samsung PM9B1 PCIe 4.0 NVMe 512GB
-
Wi-Fi- en Bluetooth-module: Intel 8265NGW AC Dual Band / Realtek RTL8B22CE
-
Camera: IMX219-200
-
PM02D-vermogensmodule
-
UBEC 12A (3-14S)
-
PDB-bord en kabelset
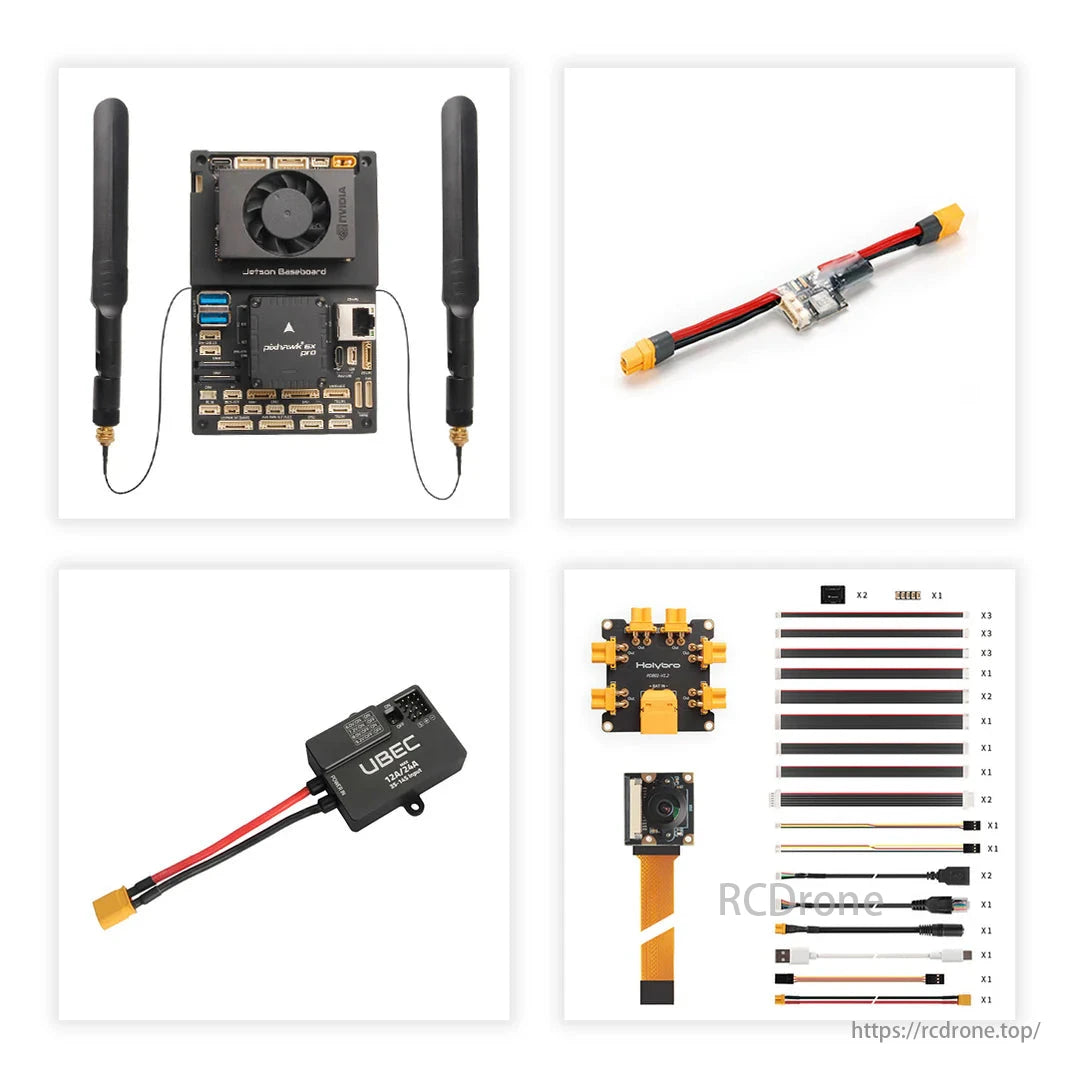
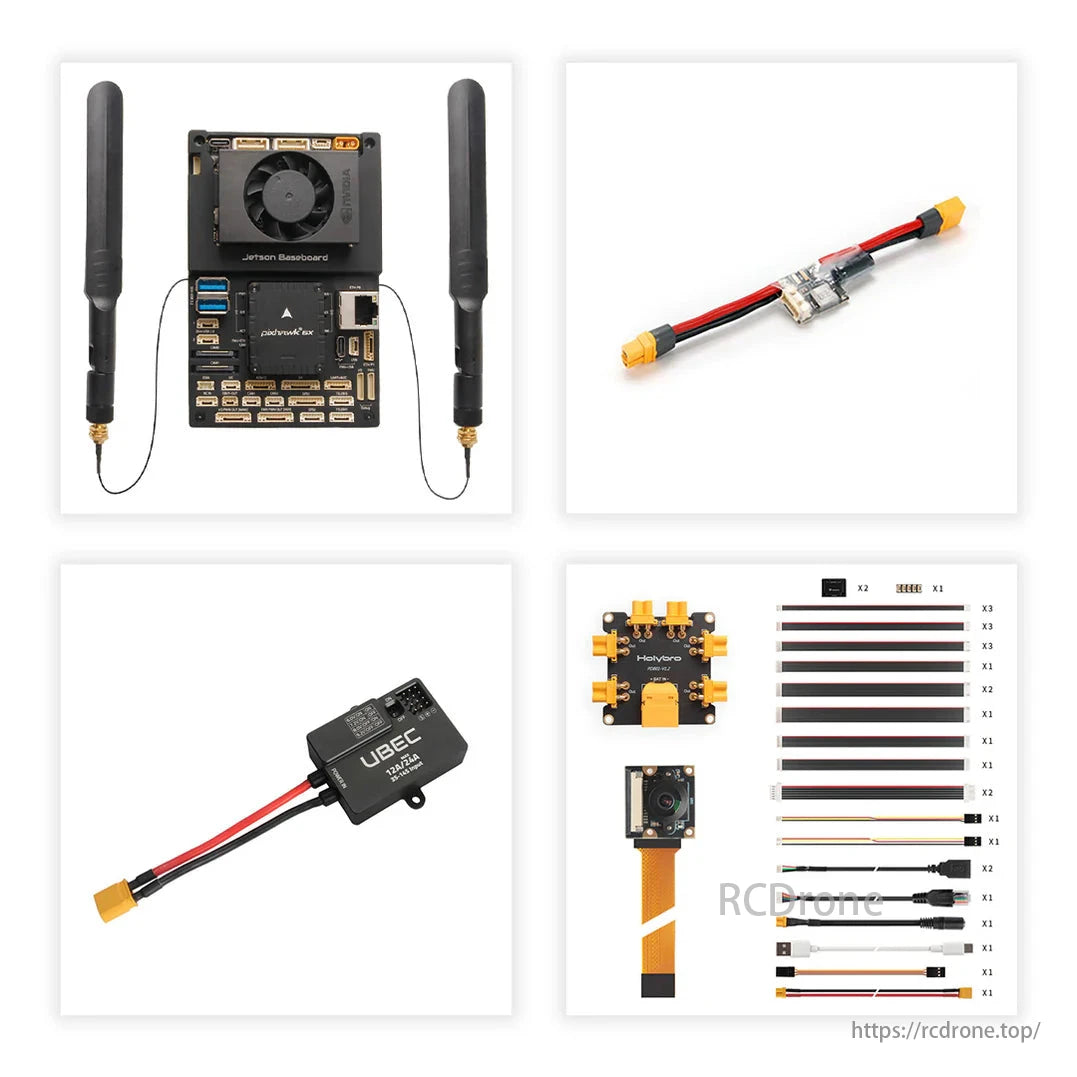
Pixhawk 6X Pro-bundel
-
Pixhawk 6X Pro Vluchtcontrollermodule
-
Pixhawk Jetson Orin plint (met of zonder behuizing)
-
Nvidia Orin NX (16 GB RAM) / Orin Nano (4 GB RAM) met koellichaam en ventilator
-
SSD, Wi-Fi/Bluetooth-module, camera, PM02D-voedingsmodule, UBEC 12A, PDB-bord, kabelset
Alleen Jetson-plint
-
Pixhawk Jetson Orin plint (met of zonder behuizing)
-
Kabelset
Referentielinks
Standaard inloggegevens voor Jetson Orin:
-
Identificatie:
heiligebro -
Wachtwoord:
123
Details




Pixhawk en Nvidia Jetson gecombineerd op één moederbord.

Nvidia Jetson aangesloten via UART-bus en Ethernet-switch met RJ45-connector voor automatische pilootsystemen
Pixhawk Autopilot Bus (PAB) Open Source-specificatie

Jetson SoDIMM-connectorsysteem volledig compatibel: Jetson Orin NX/Nano

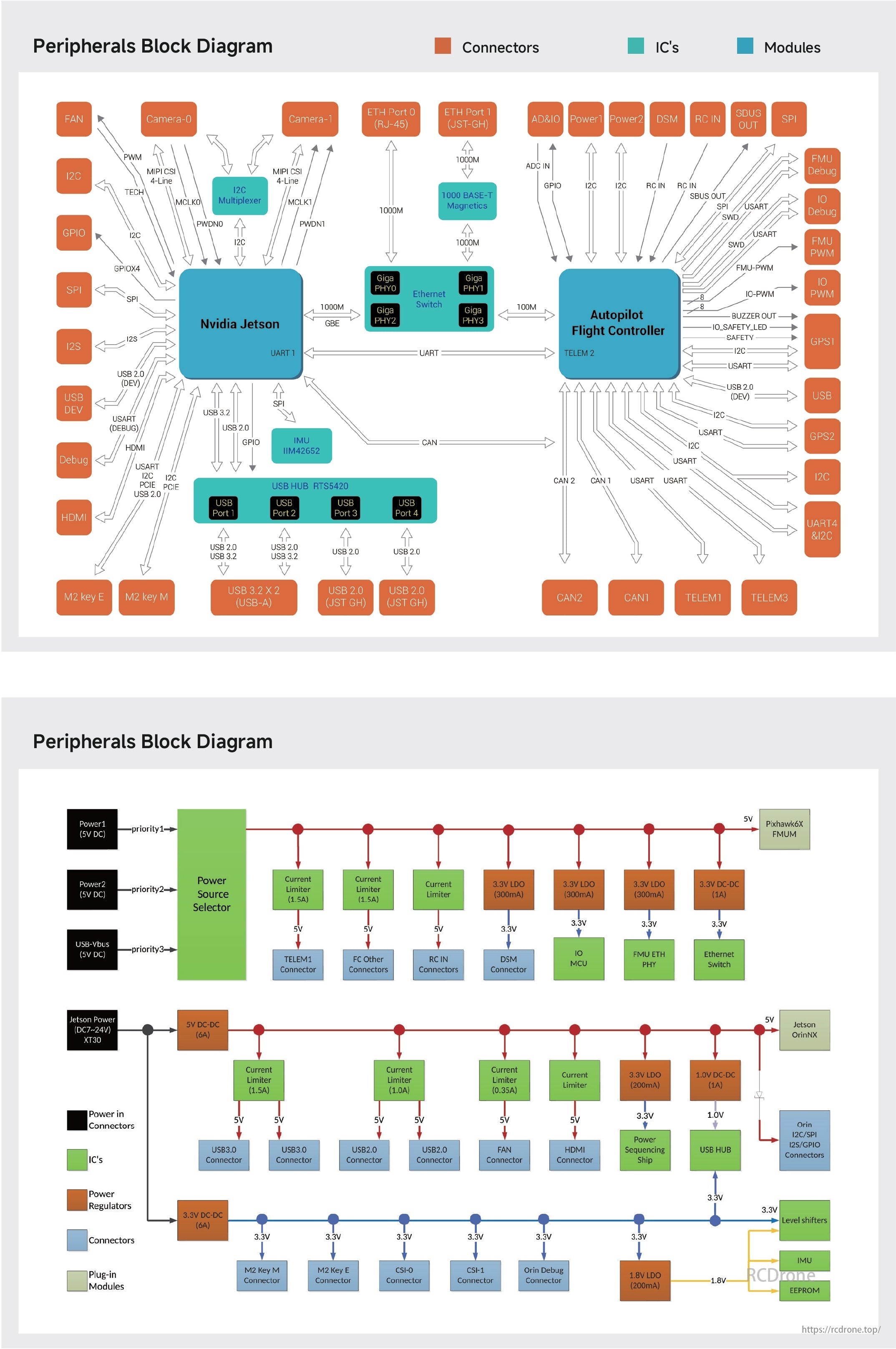
De afbeelding toont een blokdiagram van randapparatuur voor een ingebed systeem, met componenten zoals de Nvidia Jetson en Autopilot Flight Controller. Het bevat verschillende connectoren, IC's en modules zoals USB-poorten, Ethernet-switches en vermogensregelaars, die hun onderlinge verbindingen en gegevensstroom illustreren.
Referentie bedradingsschema

Twee diagrammen illustreren stroomdistributiesystemen voor een Jetson-module met één batterij. Het linker diagram gebruikt een PM02D Power Module en een Power Distribution Board, terwijl het rechter diagram een externe UBEC bevat voor batterijen groter dan 4S.Beide opstellingen zorgen voor een goede spanningsregeling voor de Jetson en Pixhawk Power.
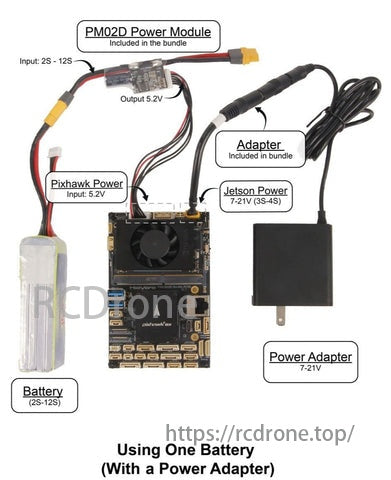
De PM02D Power Module verbindt de accu met de Pixhawk en Jetson. Hiervoor wordt één accu gebruikt met een stroomadapter voor een ingangsspanning van 7-21 V.
Related Collections