













LINKERBOT Linker Hand L10 Robot Hand, 10 DoF, CAN/RS485-besturing, wormwielaandrijving, 80N grip, DC24V+/-10%
LINKERBOT Linker Hand L10 Robot Hand, 10 DoF, CAN/RS485-besturing, wormwielaandrijving, 80N grip, DC24V+/-10%
LINKERBOT
Kan beschikbaarheid voor afhalen niet laden
Overzicht
LINKERBOT Linker Hand L10 is een robothand ontworpen voor behendige manipulatie en nauwkeurige controle. Het heeft 10 vrijheidsgraden met een wormwieloverbrenging en communiceert via CAN/RS485 voor betrouwbare integratie in onderzoeks- en industriële systemen.
Belangrijkste Kenmerken
- 10 DoF behendige hand met wormwieloverbrenging voor stabiele actuatie.
- Bedieningsinterfaces: CAN en RS485.
- Herhaalpositie-nauwkeurigheid < +/-0.2mm; typische open/sluit tijd 1.2s.
- Krachtcapaciteit: 15N max duim vingertopkracht, 15N max viervinger vingertopkracht, 80N max vijfvinger grijpkracht.
- Bedieningsmodi en hulpmiddelen uit de producthandleiding: positiecontrole, snelheidscontrole, haptische feedback (krachtcontrole) via vingertop-sensoren, en online firmware-upgrade.
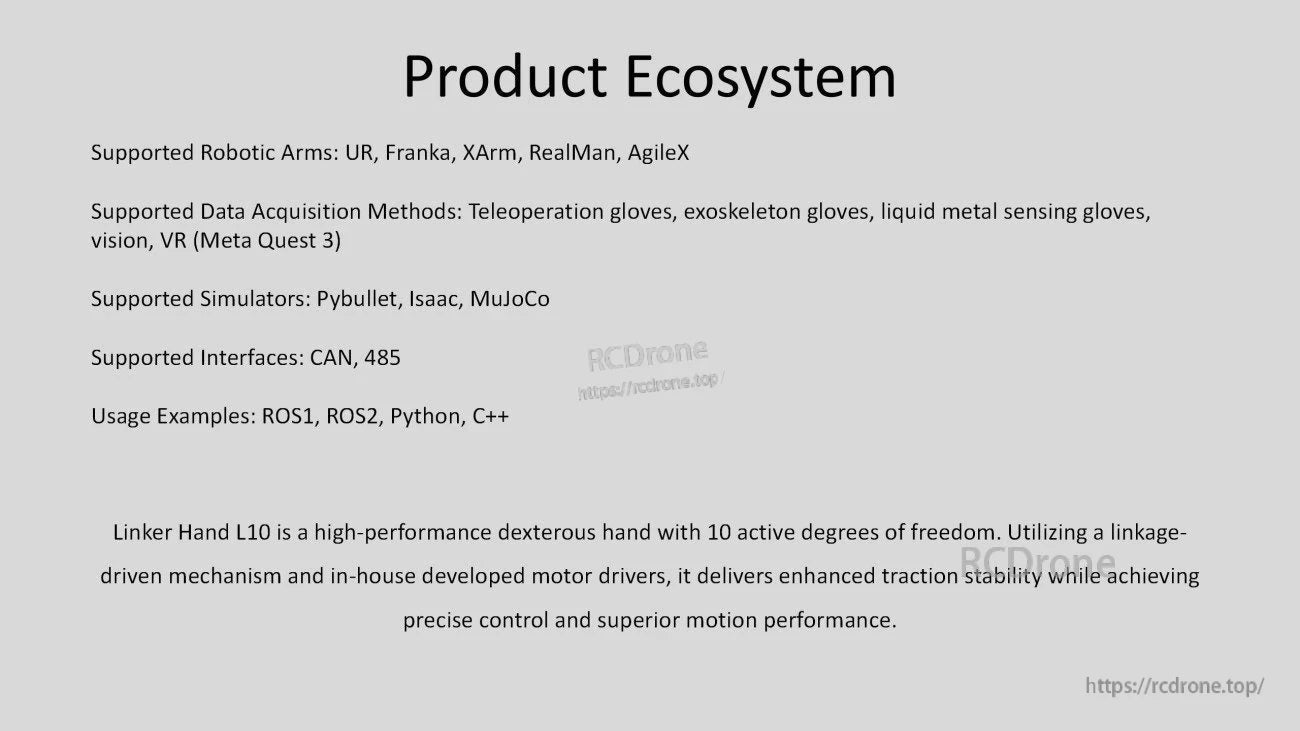
- Ecosysteem (per productmaterialen): ondersteunde robotarmen UR, Franka, XArm, RealMan, AgileX; ondersteunde simulators Pybullet, Isaac, MuJoCo; gebruiksvoorbeelden zijn onder andere ROS1, ROS2, Python, C++; gegevensverzamelmethoden omvatten teleoperatiehandschoenen, exoskelet-handschoenen, vloeibare metalen sensorenhandschoenen, visie en VR (Meta Quest 3).
Voor pre-sales of integratieondersteuning, neem contact op [email protected] or bezoek https://rcdrone.top/.
Specificaties
| Vrijheidsgraden (DoF) | 10 |
| Aantal Joints | 20 (10 Actief + 10 Passief) |
| Transmissiemodus | Wormwieltransmissie |
| Bedieningsinterface | CAN/RS485 |
| Gewicht | 800g |
| Maximale belasting | 25kg |
| Bedrijfsspanning | DC24V+/-10% |
| Statische stroom | 0.2A |
| Gemiddelde stroom (Geen belasting beweging) | 0.5A |
| Maximale stroom | 3A |
| Herhaalpositie nauwkeurigheid | < +/-0.2mm |
| Open-/sluittijd | 1.2s |
| Maximale Duwkracht van de Duimtip | 15N |
| Maximale Duwkracht van de Vier Vingers | 15N |
| Maximale Grijpkracht van Vijf Vingers | 80N |
Druksensor
| Piezoresistieve Array | 6*12 |
| Sensor Draagkrachtgebied | 9.6*14.4mm |
| Triggerkracht | 5g |
| Meetbereik | 20N |
| Levensduur | 100.000 cycli |
| Communicatieratio | 200FPS |
Capacitieve sensor (optioneel)
| Monsterfrequentie | >=50Hz |
| Meetbereik | 0-30N |
| Overbelastingslimiet | 60N |
| Druksensitiviteit | 0.1N |
| Meetresolutie | 0.5%FS |
| Meetnauwkeurigheid | 2%FS |
| Drukresolutie | 0.25N |
| Richtingsresolutie | 45° |
| Detectieafstand | 1cm (Metaal, Menselijk Lichaam) |
Wat is inbegrepen
- USB-naar-CAN debugkabel x1
- Connector kabel XT30 (2+2) x1
- Voedingsadapter x1
- Voedingskabel x1
- Linker Hand L10 x1
Toepassingen
- Behendige manipulatieonderzoek en onderwijs met behulp van ROS1/ROS2 en simulators (Pybullet, Isaac, MuJoCo).
- Teleoperatie via handschoenen, exoskelet-handschoenen, vloeibaarmetaal-sensorhandschoenen, visie en VR (Meta Quest 3).
- Precisieassemblage, pad-gebaseerde operaties, schroef aandraaien, dunne plaat grijpen en algemene objectbehandeling.
Handleidingen
Linker_Hand_L10_Product_Manual.pdf
Details

Linker Hand L10 biedt 10 DOF, nauwkeurige beweging via een koppelmechanisme en aangepaste motorbestuurders. Ondersteunt UR, Franka, ROS, Python, VR, Pybullet, CAN en meer voor veelzijdige robotintegratie en -besturing.
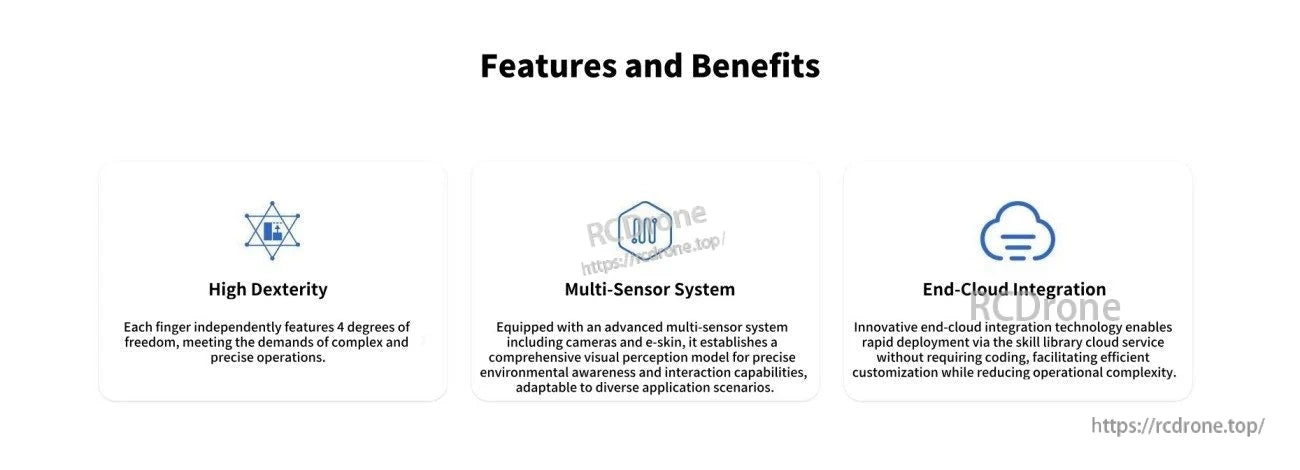
De Linker Hand L10 levert hoge behendigheid, met elke vinger die 4 vrijheidsgraden biedt voor nauwkeurige operaties. Het multi-sensor systeem—uitgerust met camera's en e-huid—biedt uitgebreide omgevingsbewustheid en adaptieve interactie. Via end-cloud integratie kunnen gebruikers de hand snel implementeren via een codevrije skill library cloudservice, wat efficiënte aanpassing mogelijk maakt terwijl de operationele complexiteit wordt verminderd. Samen ondersteunen deze mogelijkheden een breed scala aan complexe toepassingen, waardoor zowel precisie als gebruiksgemak worden verbeterd zonder uitgebreide programmering of installatie.

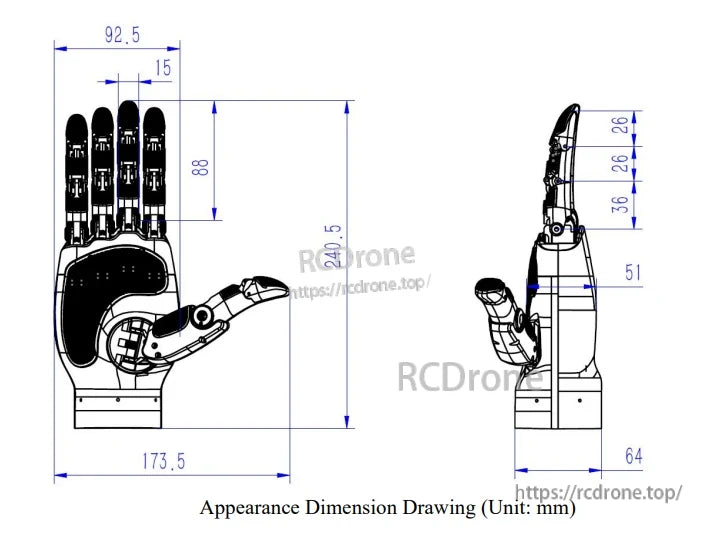
Afmetingen van de robothand in millimeters, met voor- en zijaanzichten en nauwkeurige metingen voor ontwerp en assemblage.
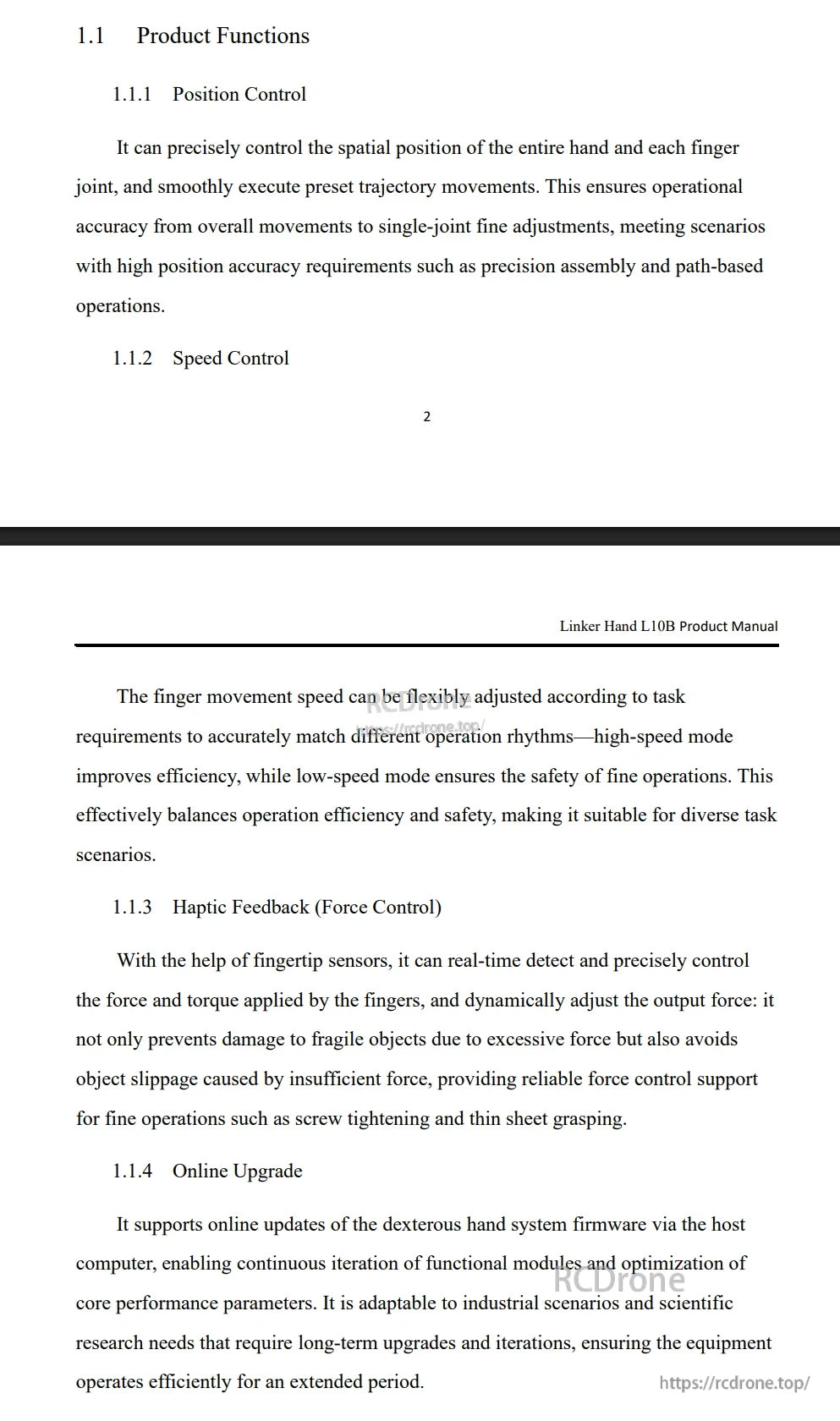
Linker Hand L10B biedt nauwkeurige positie- en snelheidscontrole, haptische feedback voor krachtbeheer en online firmware-upgrades. Ontworpen voor nauwkeurigheid, veiligheid en aanpasbaarheid in industriële en onderzoeksapplicaties die fijne manipulatie en langdurige prestaties vereisen.
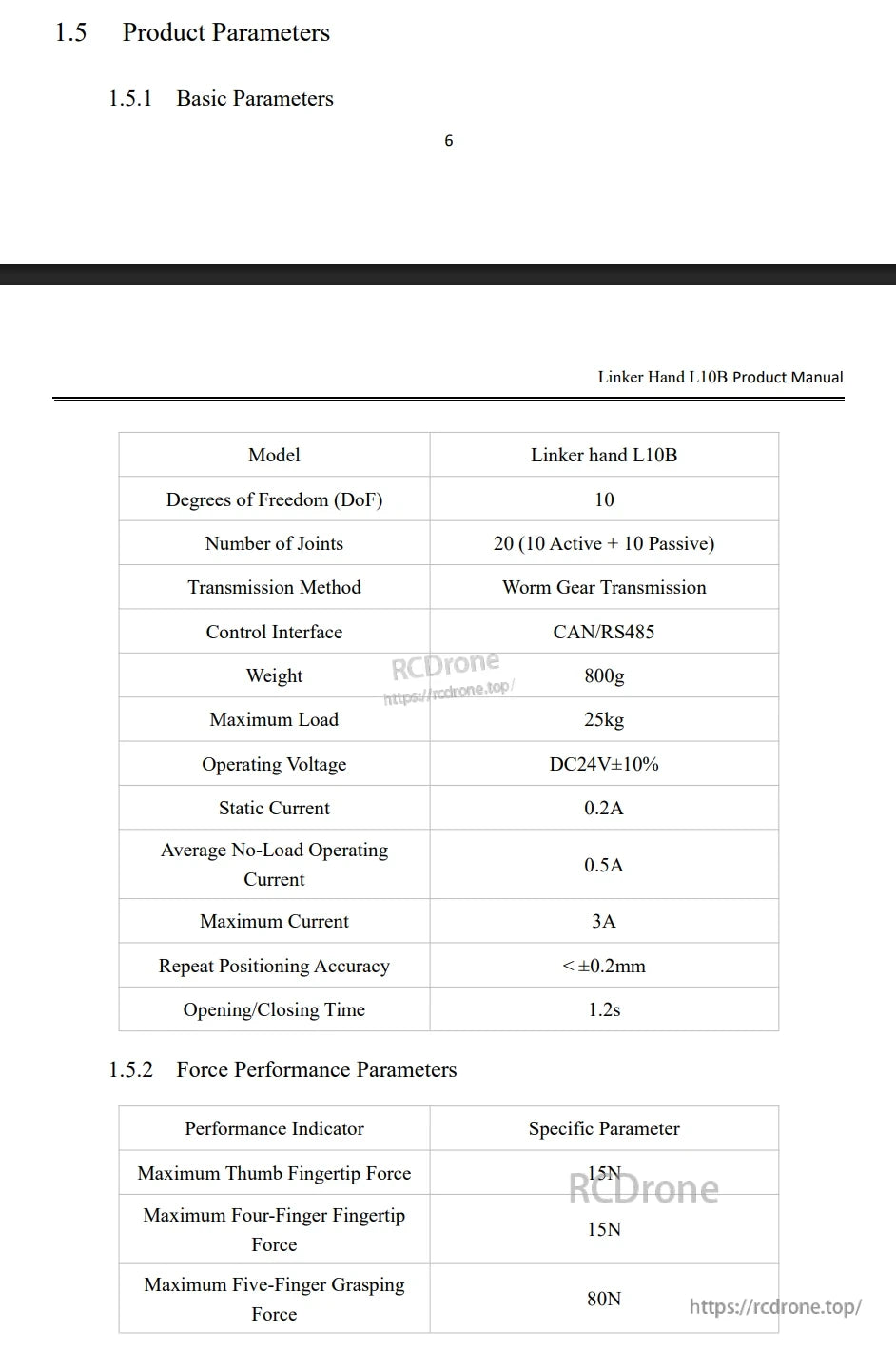
Linker Hand L10B biedt 10 DoF, 20 gewrichten, wormwieloverbrenging en CAN/RS485-besturing. Met een gewicht van 800g kan het tot 25kg aan bij DC24V, en levert het nauwkeurige positionering en grijpkrachten tot 80N.

Bevat een 6x12 piezoresistieve array (20N bereik, 100k cycli). Optionele capacitieve sensor: ≥50Hz sampling, 0–30N bereik, 45° richtingsresolutie, detecteert metaal of menselijk lichaam op 1cm.
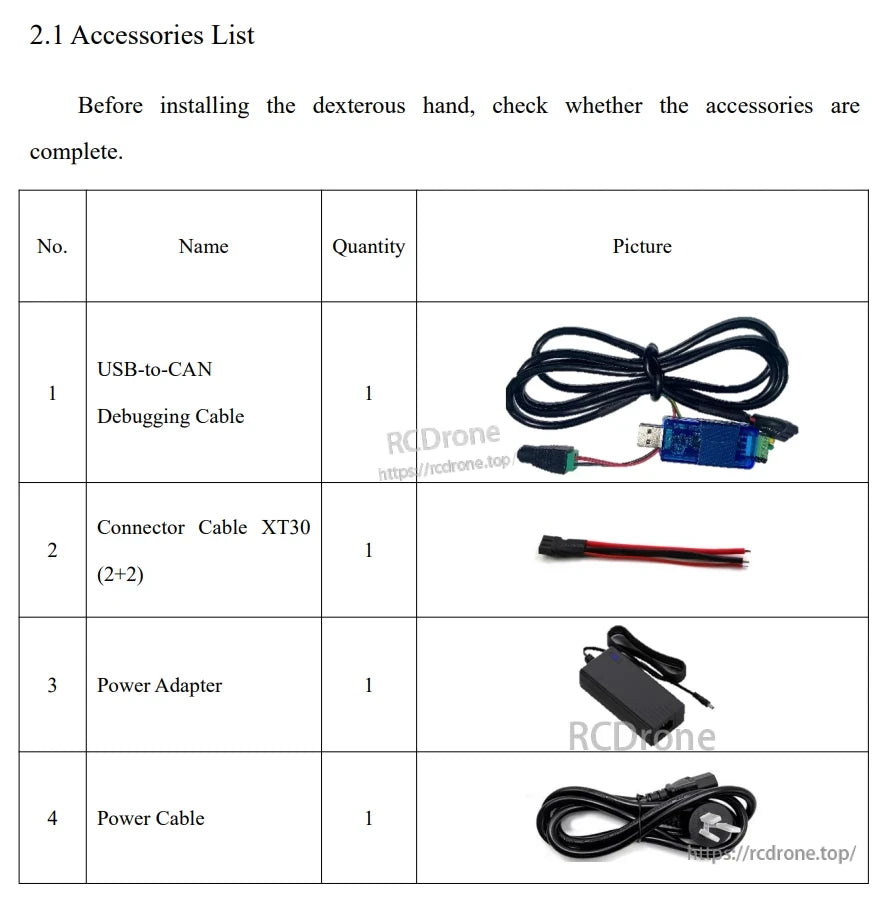
Accessoirelijst voor de installatie van een behendige hand: USB-naar-CAN-kabel, XT30-connector, voedingsadapter en voedingskabel, elk in hoeveelheid één.
Related Collections













