



LKMTECH MF4005-V2 Motor 12V RS485/CAN 18bit Magnetische Encoder DF40V2 Aandrijvingsoptie voor Robotica
LKMTECH MF4005-V2 Motor 12V RS485/CAN 18bit Magnetische Encoder DF40V2 Aandrijvingsoptie voor Robotica
LKMTECH
Kan beschikbaarheid voor afhalen niet laden
Overzicht
LKMTECH MF4005-V2 is een motor ontworpen voor geïntegreerde mechatronische toepassingen die een lichtgewicht ontwerp, hoge controle-nauwkeurigheid en hoge koppeloutput vereisen. De MF4005 V2-update benadrukt: encoderresolutie geüpgraded van 14-bits naar 18-bits, optimalisatie van het cogging-koppel, ondersteuning voor PWM-ingang en CAN/RS485-communicatie met meerdere baudrate-opties.
Belangrijkste Kenmerken
- Geïntegreerd ontwerp: mechanische-elektrische integratie
- Lichtgewicht ontwerp: vlak ontwerp van luchtvaartaluminiumlegeringen
- Hoge controle nauwkeurigheid: magnetische encoder (MF4005 V2-update geeft 14-bits geüpgraded naar 18-bits)
- Hoge koppeloutput: hoge prestaties RbFeB permanente magneet
- Ondersteunt PWM-ingang
- Communicatie: CAN of RS485
- Aandrijffuncties: kan schakelen tussen koppelmodus, snelheidsmodus en positie modus
- Hoofdcontrole: 32-bits Cortex-M4 ARM hoog-efficiëntie processor (aandrijving)
- Real-time monitoring van de statortemperatuur (aandrijving)
- Aandrijvingskrachtfase: volledige brugcircuit met lage interne weerstand en hoge stroom
- 18-bits enkele omwenteling absolute waarde magnetische encoder (aandrijvingsfunctie tekst); één kalibratie, nulpositie nooit kwijt
- Motorconstructie notities: externe rotor; permanente magneet multi-stage boogontwerp; kleinere luchtspeling; radiale magnetisatie; 0.2 mm siliconen staalplaat; klasse H geïsoleerde geëmailleerde draad; SH klasse NdFeB
- OEM/ODM service (geen productspecificatie)
- Parameter software: programmatuur geleverd om parameters aan te passen, testen en upgraden; ondersteunt open source ontwikkeling zoals PC, MCU, PLC, ICP en RPi
Toepassingsscenario's
- Humanoïde Robots
- Robotarmen
- Exoskeletten
- Viervoetige Robots
- AGV Voertuigen
- ARU Robots
- Camera PTZ
- Laser Lidar
- Inspectierobot voor energiecentrales
- Industriële Inspectie
Specificaties
Motor model: MF4005-V2
| Parameter | Waarde (25 windingen) | Waarde (40 windingen) |
|---|---|---|
| Artikelnaam | MF4005-V2 | MF4005-V2 |
| Windingen | 25 | 40 |
| Nominale spanning | 12V | 12V |
| Maximale snelheid | 2390RPM | 1300RPM |
| Nominaal koppel | 0.07 N.m | 0.06 N.m |
| Beoordeelde Snelheid | 1600RPM | 700RPM |
| Beoordeelde Stroom | 1.44A | 0.81A |
| Max Vermogen | 14W | 4.6W |
| Max Koppel | 0.25 N.m | 0.12 N.m |
| Snelheidsconstante | 133 rpm/V | 58 rpm/V |
| Koppelconstante | 0.05 N.m/A | 0.07 N.m/A |
| Wikkelingstype | Y | Y |
| Faseweerstand | 1.9Ω | 4.3Ω |
| Fase-inductantie | 0.5mH | 1.2mH |
| Motor Polen | 26 | 26 |
| Rotor traagheid | 56 gcm² | 56 gcm² |
| Motor Temperatuur | JA | JA |
| Lagerring Geclassificeerde Last | 140N | 140N |
| Motor Gewicht | 65g | 65g |
| Aanbevolen Aandrijving | DF40V2 | DF40V2 |
| Aandrijving invoer Spanning | 7.4-32V | 7.4-32V |
| Communicatie | RS485 OF CAN | RS485 OF CAN |
| Communicatie Frequentie | RS485: 500Hz (115200bps) / CAN: 2KHz (1Mbps) | RS485: 500Hz (115200bps) / CAN: 2KHz (1Mbps) |
| Encoder | 18bit Magnetische Encoder | 18bit Magnetische Encoder |
| Encoder Baudrate (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| Baudrate (CAN) | 100K, 125K, 250K, 500K, 1M | 100K, 125K, 250K, 500K, 1M |
| Besturingsmodus | Koppelkring (24KHz) / Snelheidskring (8KHz) / Positiek ring (8KHz) | Koppelkring (24KHz) / Snelheidskring (8KHz) / Positiek ring (8KHz) |
| Versnelling curve | Trapezium versnelling | Trapezium versnelling |
Interface Definitie
ID schakelaar: ID SCHAKELAAR
| Interface | Opmerking |
|---|---|
| A/L | RS485-A of CAN-L |
| B/H | RS485-B of CAN-H |
| V+ | Positieve Voedingsspanning |
| V+ | Positieve Voedingsspanning |
| V- | Negatieve Voedingsspanning |
| V- | Negatieve Voedingsspanning |
| T | UART Zender |
| R | UART Ontvanger |
| G | Signaal GND |
Voor pre-sales of integratie ondersteuning (RS485/CAN setup, baudrate selectie, en CAD-bestanden), neem contact op [email protected] or bezoek https://rcdrone.top/.
Handleidingen / Bestanden
Details

MF4005‑V2 integreert motor-, encoder- en aandrijfeigenschappen voor compacte robotica-constructies, met een geüpgradede 18-bits magnetische encoder en CAN/RS485 communicatiemogelijkheden.
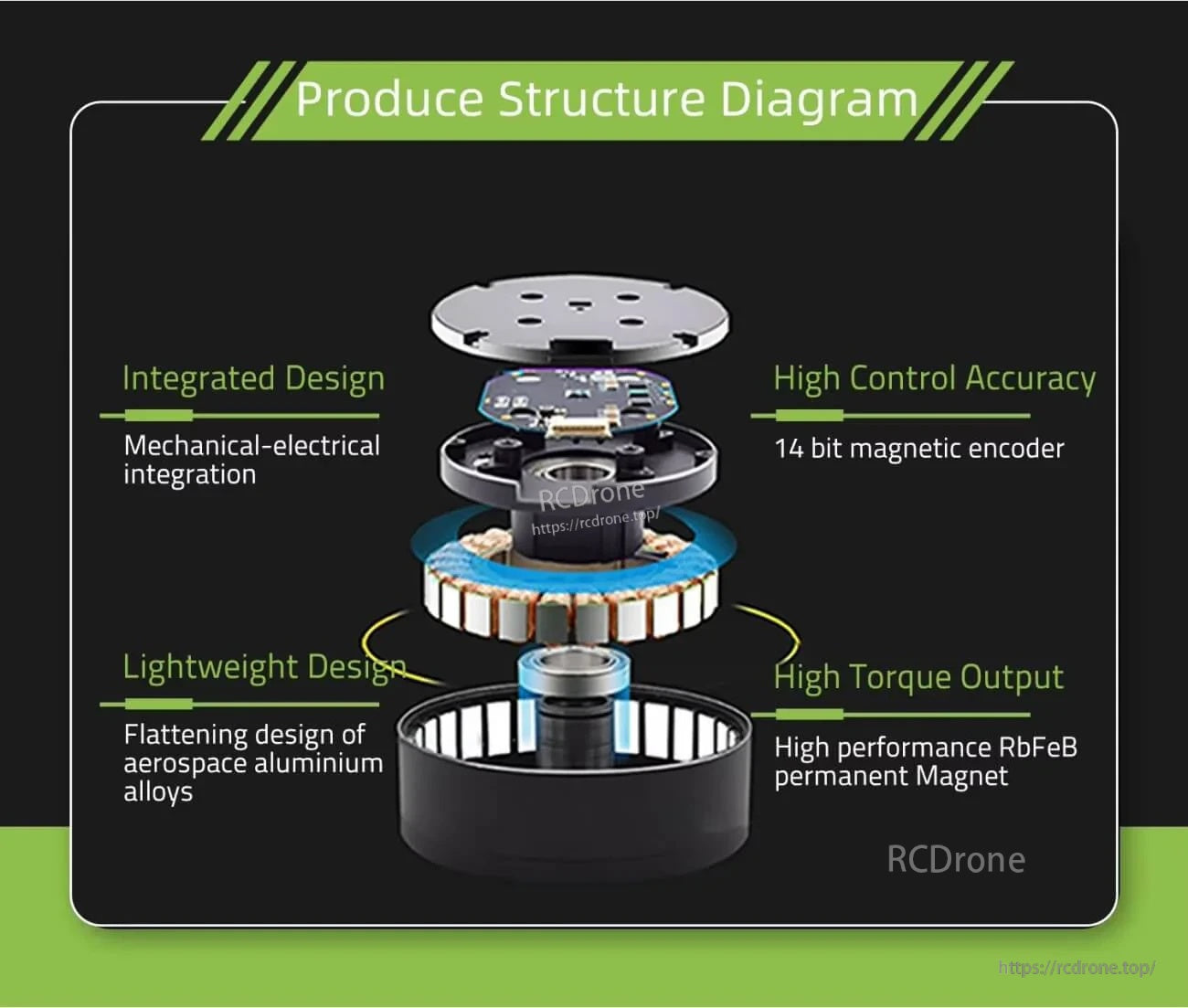
Een geïntegreerde, lichte constructie combineert de aandrijfelektronica met de motorassemblage om nauwkeurige controle en een hoog koppel te ondersteunen.
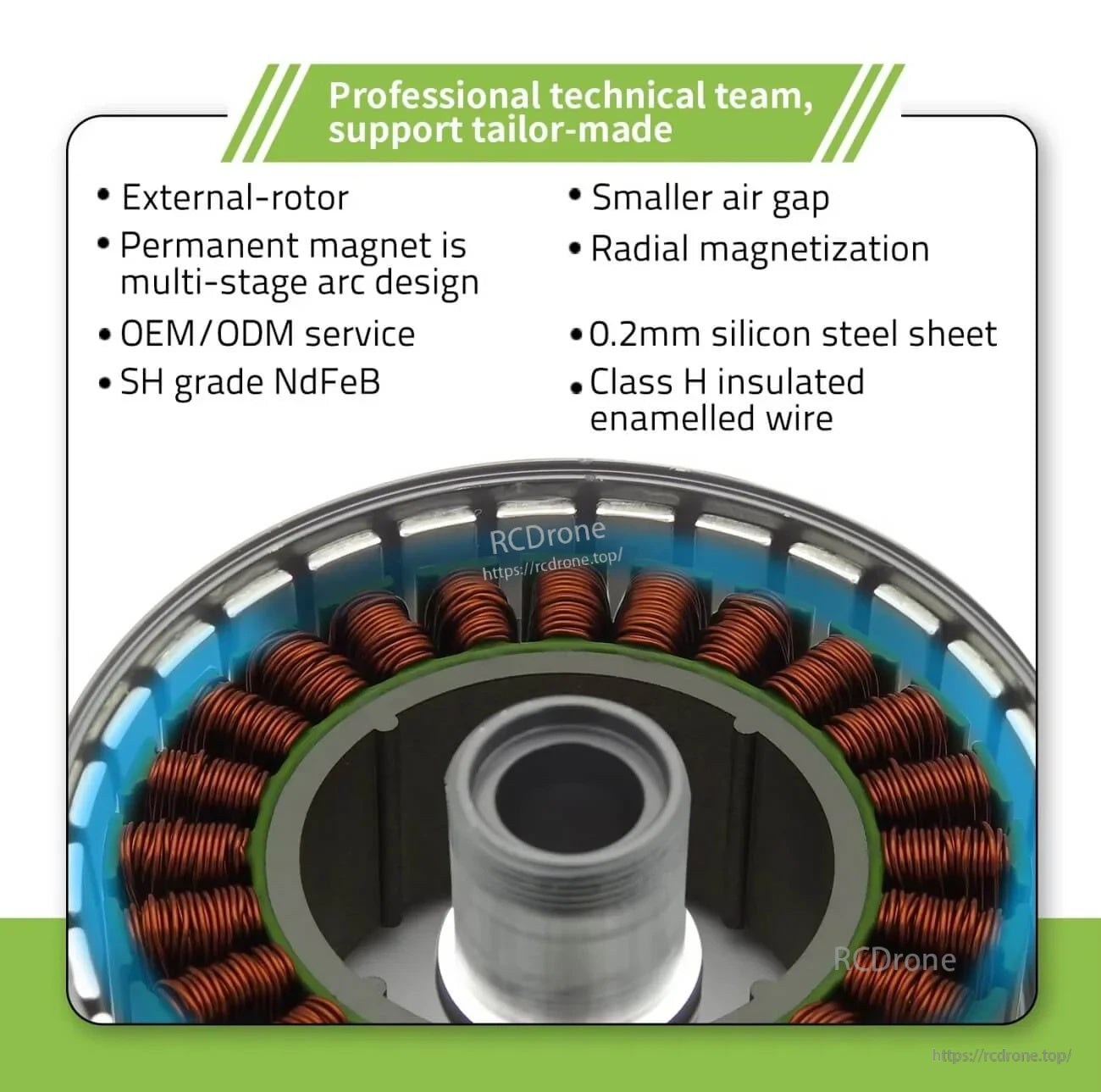
Het ontwerp met externe rotor en dichte wikkeling helpt de grootte, responsiviteit en koppel voor robotische gewrichten en actuatoren in balans te houden.
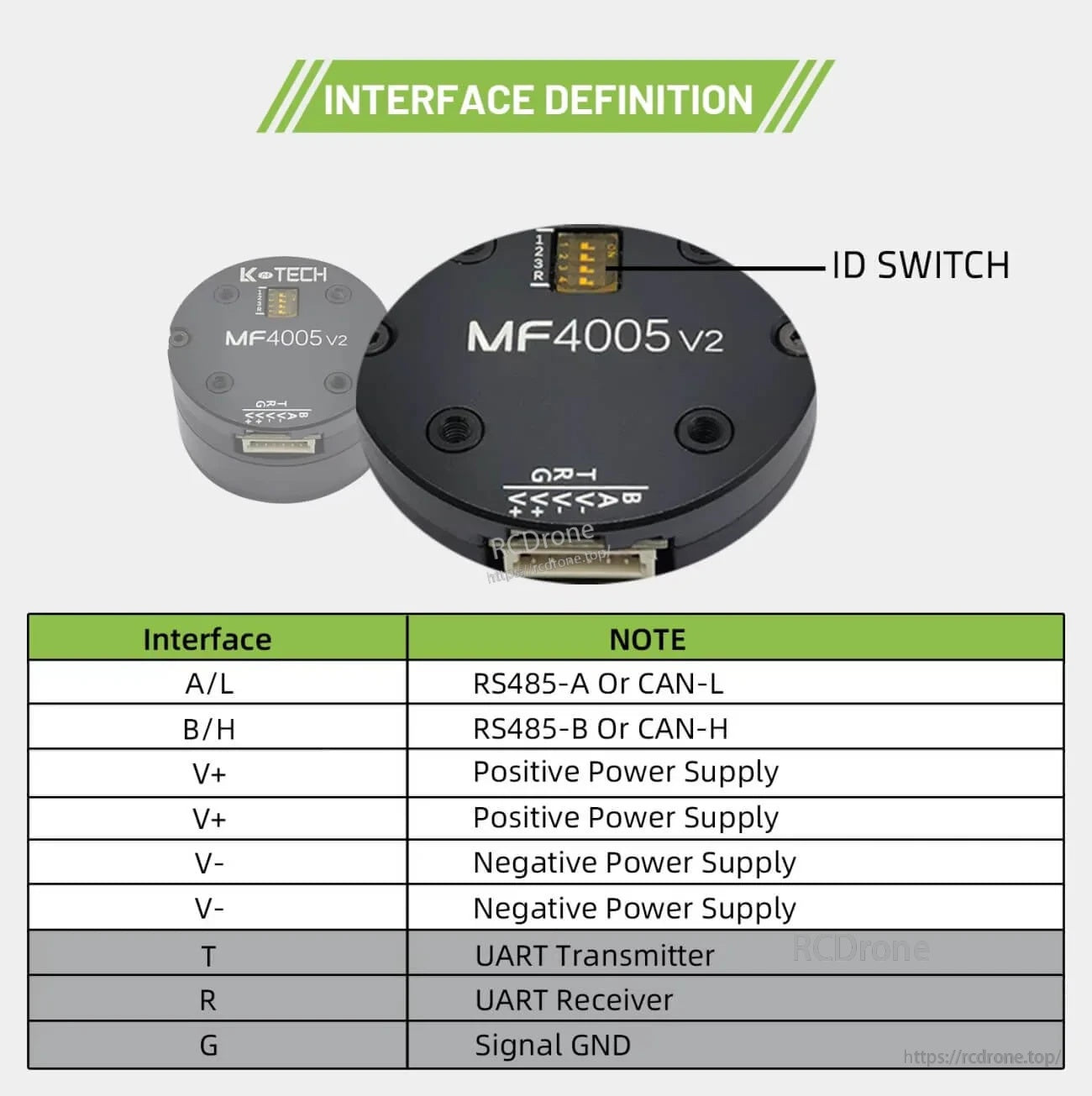
De bedrading is vereenvoudigd met een duidelijk gelabelde connector en ID-schakelaar voor busconfiguraties met RS485 of CAN.
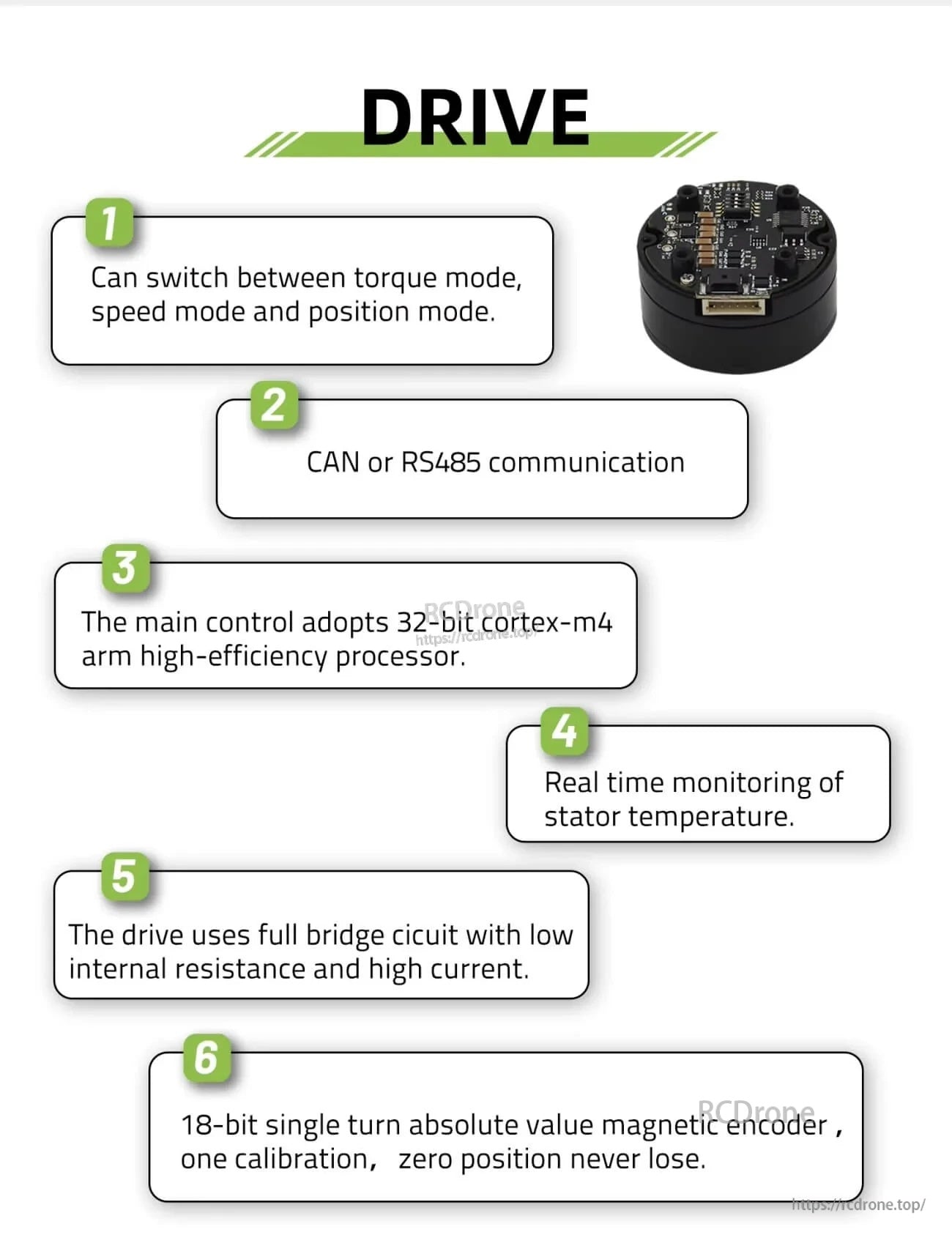
Aandrijfcapaciteiten omvatten selecteerbare koppel-, snelheid- en positie-instellingen, plus realtime monitoring van de statortemperatuur via CAN of RS485.
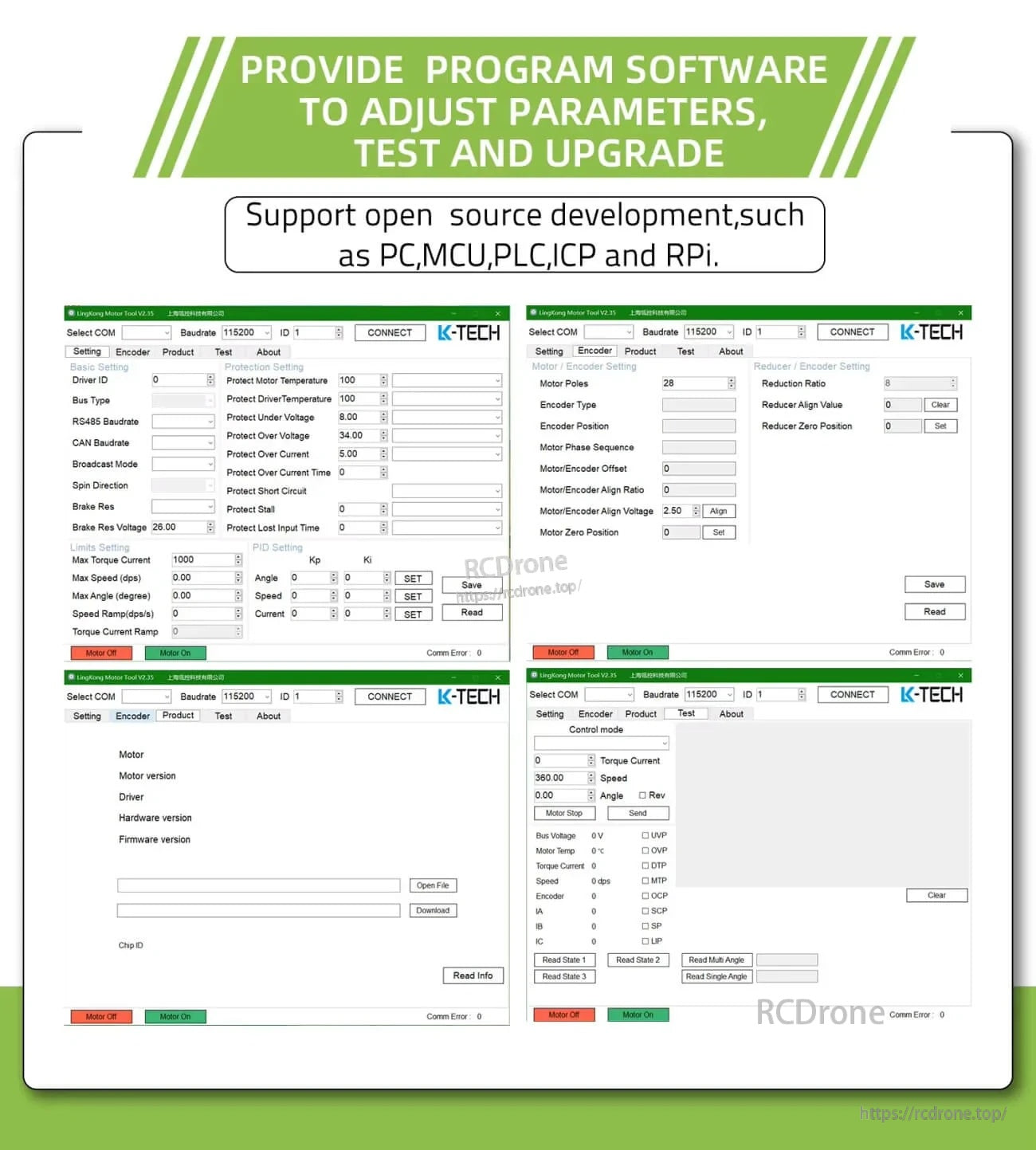
PC-softwareondersteuning helpt bij het afstemmen van parameters, testen en upgrades, met opties die zijn afgestemd op ontwikkelingsworkflows.
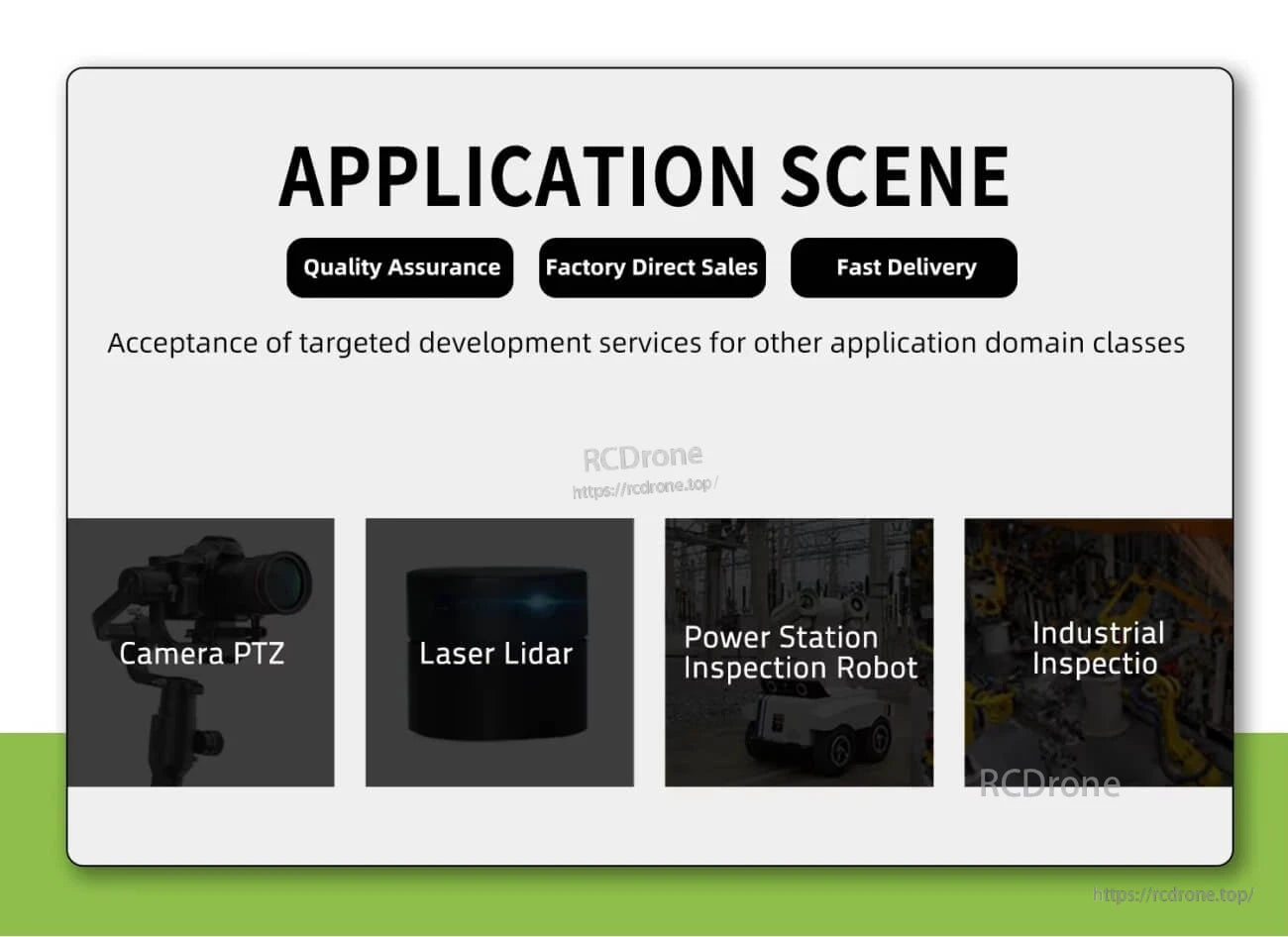
Veelvoorkomende toepassingsgebieden zijn PTZ-camera's, lidar-systemen en inspectierobots die worden gebruikt in industriële omgevingen.
Related Collections



