



LKMTECH MF6015-V2 Motor 24V (15T/25T) 18bit Magnetische Encoder, RS485/CAN, DF40v2 Aandrijving Aanbevolen
LKMTECH MF6015-V2 Motor 24V (15T/25T) 18bit Magnetische Encoder, RS485/CAN, DF40v2 Aandrijving Aanbevolen
LKMTECH
Kan beschikbaarheid voor afhalen niet laden
Overzicht
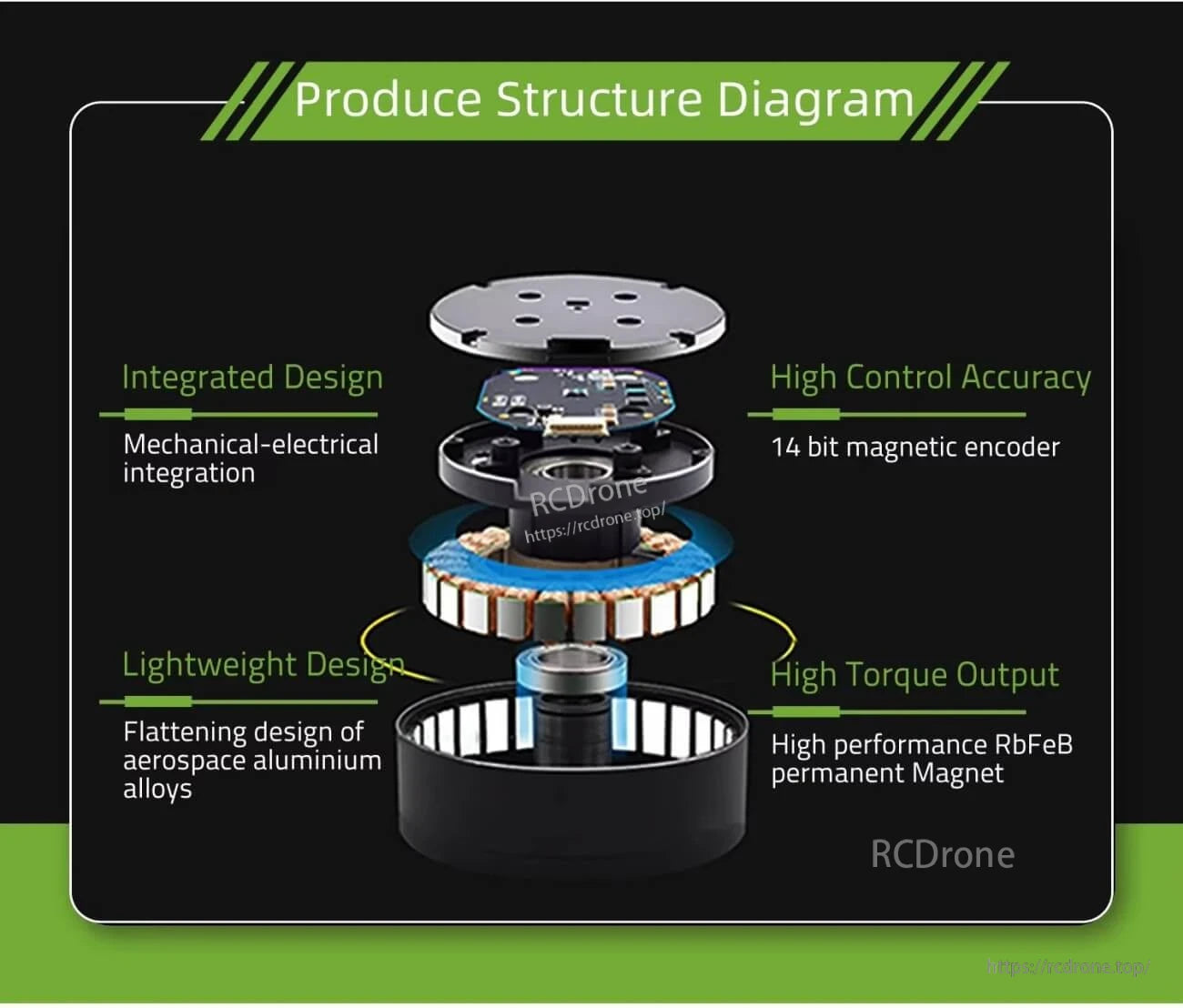
LKMTECH MF6015-V2 Motor (MF6015v2) is een geïntegreerd ontwerp motor systeem met een lichtgewicht constructie, hoge controle nauwkeurigheid en hoge koppeloutput. MF v2 updates omvatten encoderresolutie geüpgraded van 14-bits naar 18-bits, cogging koppeloptimalisatie, PWM-ingangsondersteuning, en CAN en RS485 communicatie met meerdere baudrate-opties.
Belangrijkste Kenmerken
- Geïntegreerd ontwerp: mechanische-elektrische integratie
- Lichtgewicht ontwerp: vlak ontwerp van lucht- en ruimtevaart aluminiumlegeringen
- Hoge koppeloutput: hoge prestaties RbFeB permanente magneet
- Motorconstructie hoogtepunten: externe rotor; permanente magneet multi-stage boogontwerp; kleinere luchtspeling; radiale magnetisatie; 0.2mm siliconen staalplaat; Klasse H geïsoleerde geëmailleerde draad; SH klasse NdFeB
- Aandrijf-/besturingsmogelijkheden: kan schakelen tussen koppelmodus, snelheidsmodus en positie modus; CAN of RS485 communicatie; hoofdcontrole maakt gebruik van 32-bits cortex-m4 ARM hoogefficiënte processor; realtime monitoring van de stator temperatuur; volledige brugcircuits met lage interne weerstand en hoge stroom
- Encoder: 18-bits enkele omwenteling absolute waarde magnetische encoder; één kalibratie; nulpositie gaat nooit verloren
- Software: biedt programma-software om parameters aan te passen, testen en upgraden; ondersteunt open source ontwikkeling zoals PC, MCU, PLC, ICP en RPi
Voor integratievragen (bedrading, CAN/RS485 setup, of selectie tussen 15T en 25T), neem contact op met ondersteuning op https://rcdrone.top/ of [email protected].
Toepassingsscenario's
- Humanoïde Robots
- Robotarmen
- Exoskeletten
- Kwadruped Robots
- AGV Voertuigen
- ARU Robots
Specificaties
| Parameter | Waarde (15T) | Waarde (25T) |
|---|---|---|
| Artikelnaam | MF6015v2 | MF6015v2 |
| Omwentelingen | 15 | 25 |
| Nominale Spanning | 24V | 24V |
| Maximale Snelheid | 1650RPM | 872RPM |
| Nominaal Koppel | 0.81N.m | 0.82N.m |
| Nominale Snelheid | 1260RPM | 560RPM |
| Nominale Stroom | 5.87A | 3.1A |
| Max Vermogen | 185W | 57W |
| Max Koppel | 5.5N.m | 3N.m |
| Constante Snelheid | 53rpm/V | 23.3rpm/V |
| Constante Koppel | 0.14N.m/A | 0.26N.m/A |
| Wikkelingstype | Y | Y |
| Lijnweerstand | 0.89Ω | 2.17Ω |
| Fase Inductantie | 0.49mH | 1.44mH |
| Motor Polen | 28 | 28 |
| Rotor inertie | 515gcm² | 515gcm² |
| Motor Temperatuur | JA | JA |
| Lagerring Geclassificeerde Last | 280N | 280N |
| Motor Gewicht | 251g | 251g |
| Aanbevolen Aandrijving | DF40v2 | DF40v2 |
| Aandrijving invoer Spanning | 7.4-32V | 7.4-32V |
| Communicatie | RS485 OF CAN | RS485 OF CAN |
| Communicatie Frequentie | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) |
| Encoder | 18-bits Magnetische Encoder | 18-bits Magnetische Encoder |
| Encoder Baudrate (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| Baudrate (CAN) | 100K, 125K, 250K, 500K, 1M | 100K, 125K, 250K, 500K, 1M |
| Besturingsmodus | Koppel Loop(24KHz)/Snelheid Loop(8KHz)/Positie Loop(8KHz) | Koppel Loop(24KHz)/Snelheid Loop(8KHz)/Positie Loop(8KHz) |
| Versnelling curve | Trapezium versnelling | Trapezium versnelling |
Interface Definitie
| Interface | Opmerking |
|---|---|
| B/L | RS485-B Of CAN-L |
| A/H | RS485-A Of CAN-H |
| V- | Negatieve Voedingsspanning |
| V- | Negatieve Voedingsspanning |
| V+ | Positieve Voedingsspanning |
| V+ | Positieve Voedingsspanning |
| T | UART Zender |
| R | UART Ontvanger |
| G | Signaal GND |
ID SCHAKELAAR is voorzien op de eenheid.
Handleidingen / Documenten
Details

MF6015-V2 integreert de motor, aandrijving en 18-bits magnetische encoder voor compacte 24V robotgewrichten met CAN of RS485 besturing.
Een geïntegreerde mechanisch-elektrische indeling houdt de assemblage plat en lichtgewicht terwijl een hoog koppeloutput behouden blijft.
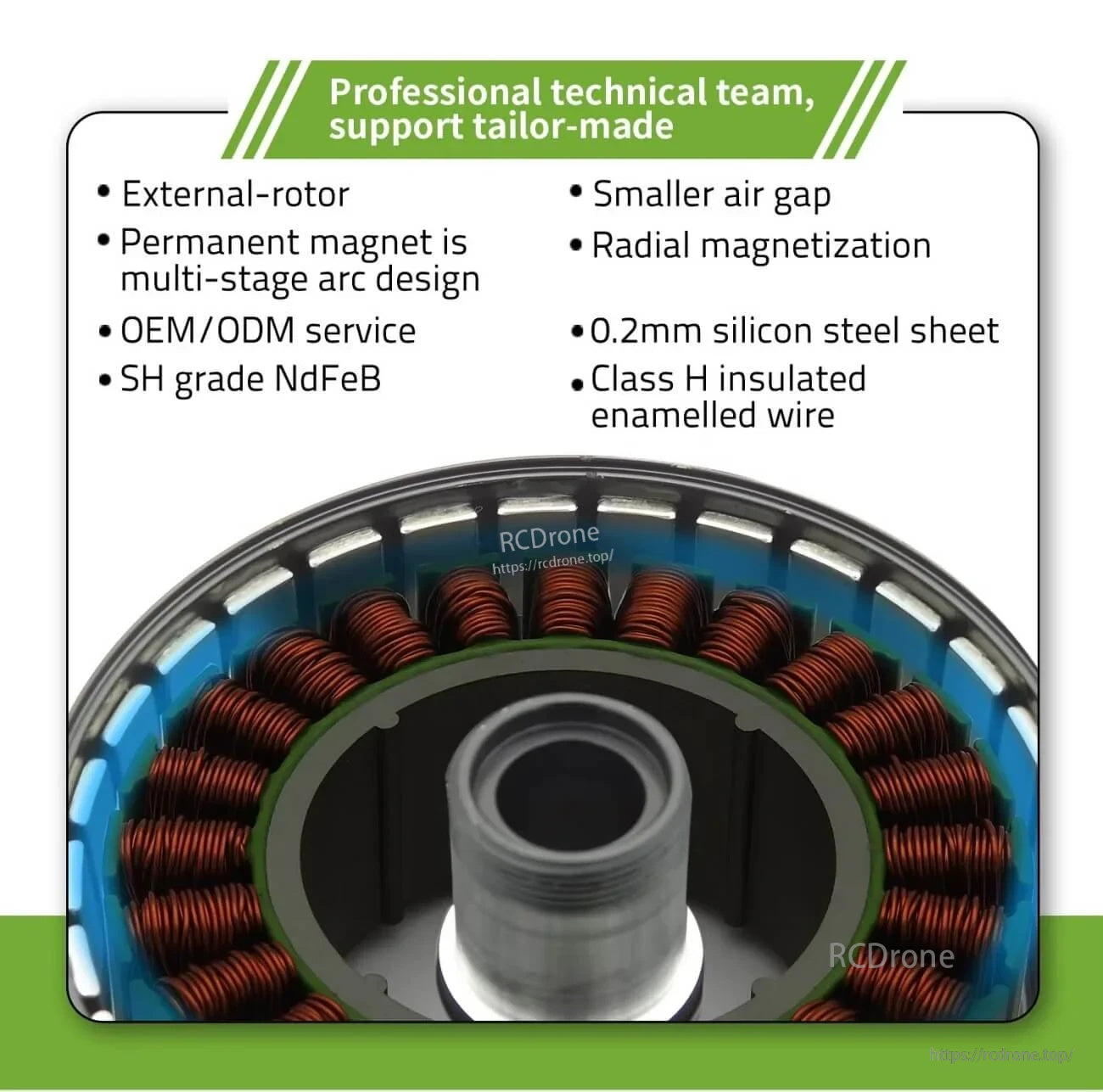
Buitenrotorconstructie met een kleine luchtspeling is ontworpen om de koppel dichtheid en soepele rotatie te verbeteren.
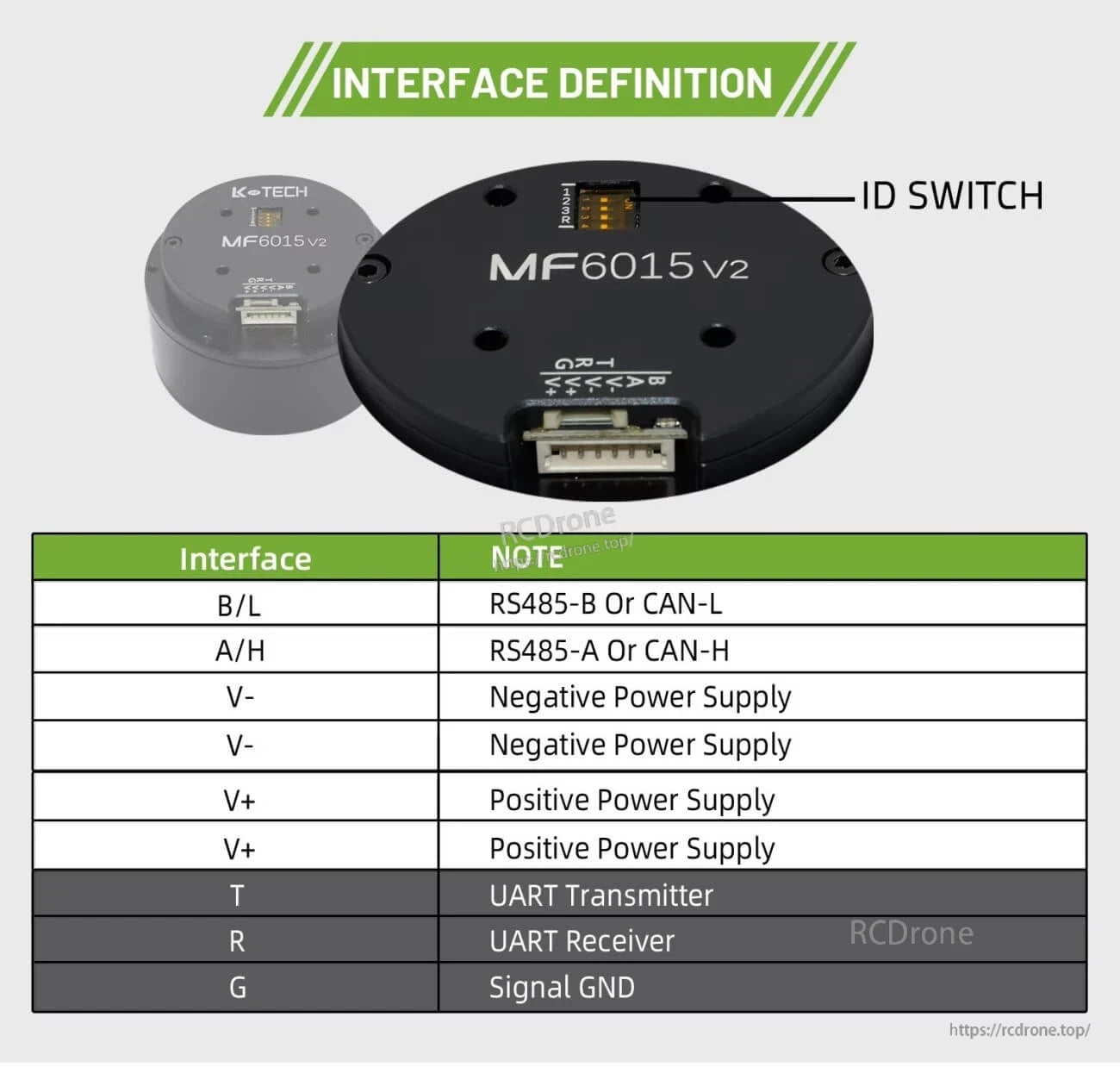
Connector pinout en de onboard ID-schakelaar maken multi-node CAN/RS485 bedrading en adressering eenvoudiger.
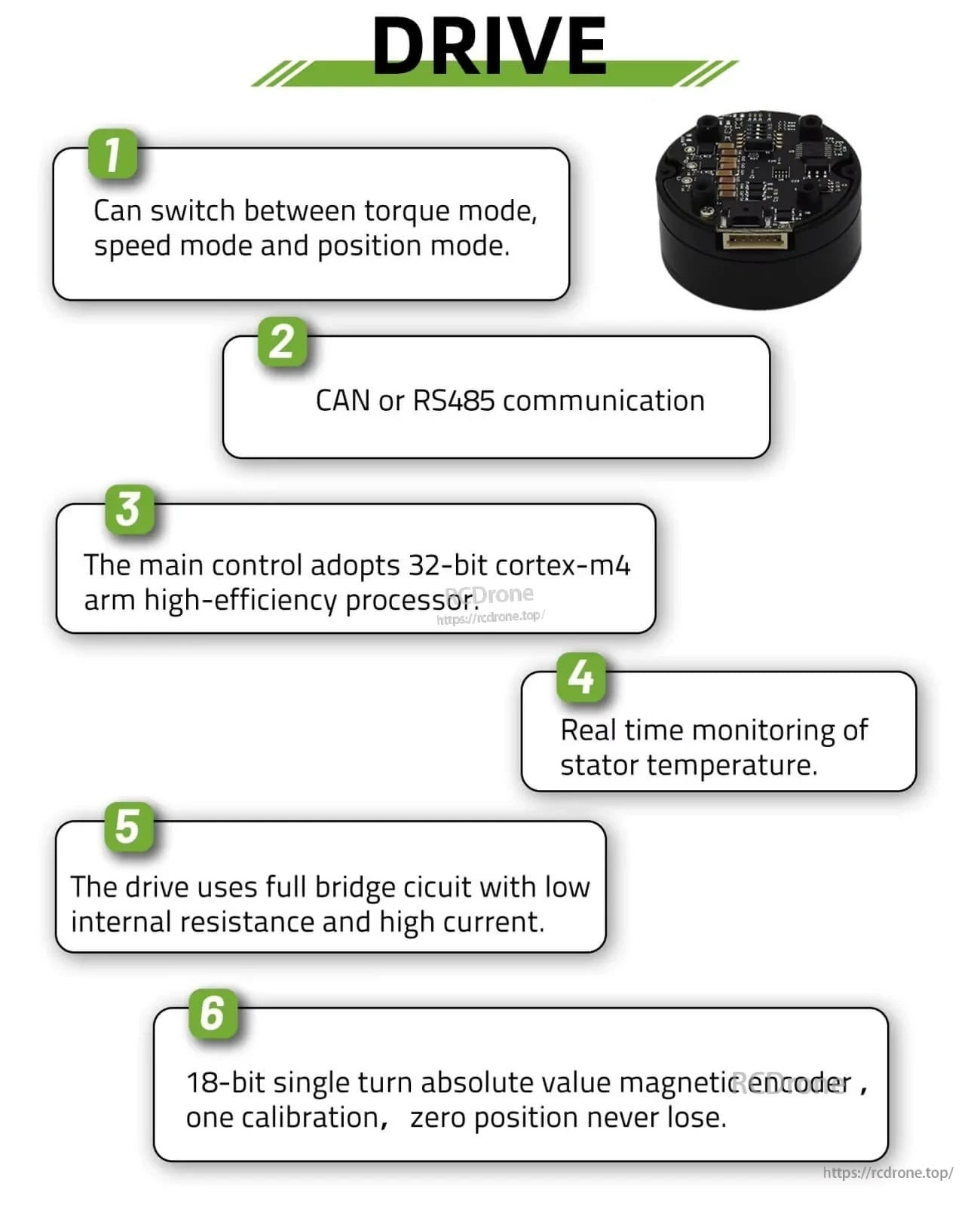
Koppel-, snelheid- en positiecontrolemodi worden ondersteund, met realtime stator temperatuurmonitoring via CAN of RS485.
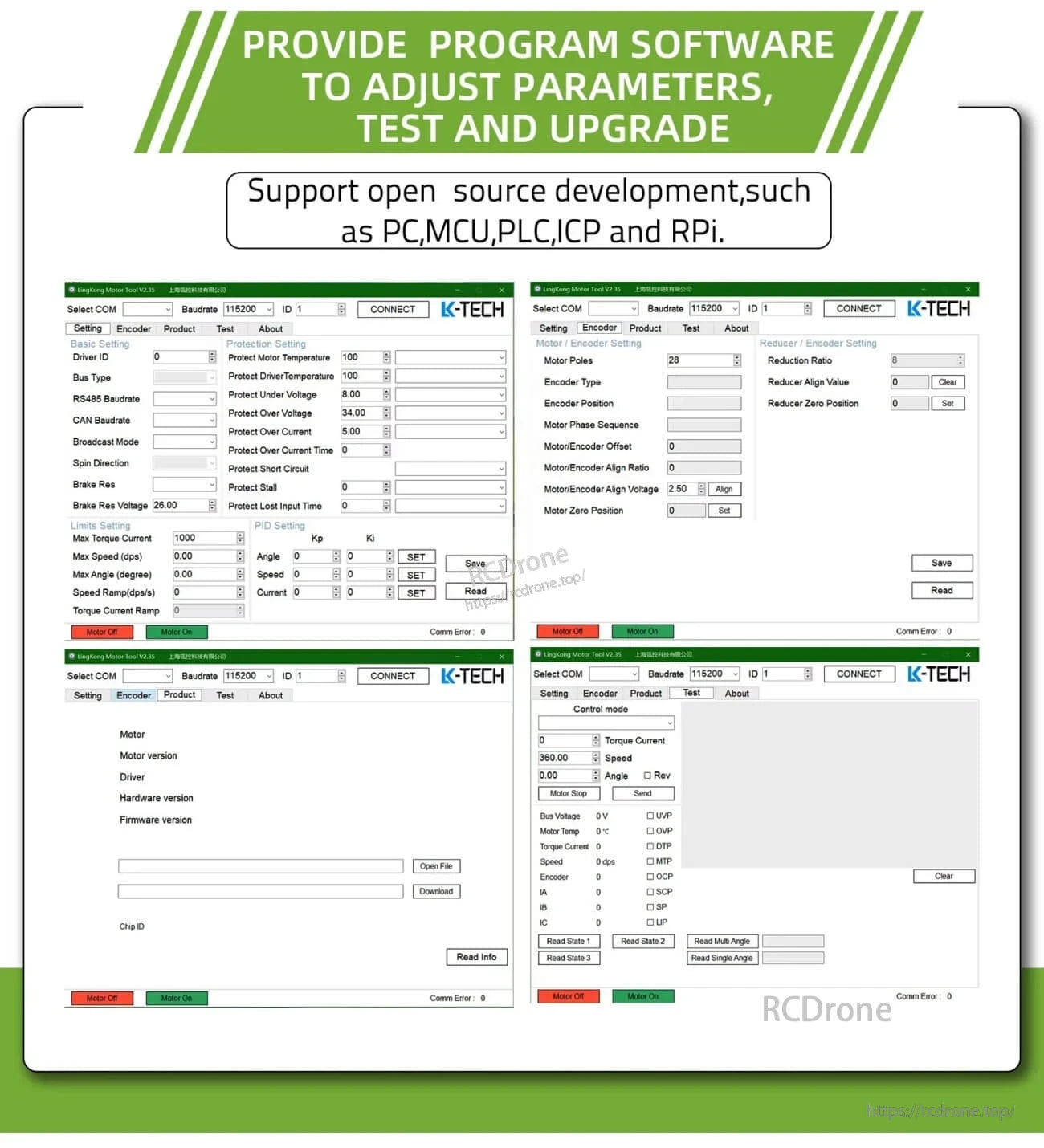
PC-software wordt geleverd voor parameterafstemming, testen en firmware-upgrades, met opties voor baudrate en controle-instellingen.

Related Collections



