




LKMTECH MG4005E-i10-V3 Planetaire Tandwielmotor, 24V 1:10 PG4210, RS485/CAN Dubbele Encoder
LKMTECH MG4005E-i10-V3 Planetaire Tandwielmotor, 24V 1:10 PG4210, RS485/CAN Dubbele Encoder
LKMTECH
Kan beschikbaarheid voor afhalen niet laden
Overzicht
De LKMTECH MG4005E-i10-V3 Motor is een planetaire tandwielmotor ontworpen voor robotische beweging en automatiseringsverbindingen die compacte overbrengingen, gesloten-lus feedback en buscommunicatie vereisen. Het integreert een planetaire tandwielreductor (PG4210, 1:10) en dubbele absolute magnetische encoders (motorzijde + reducerzijde) voor nauwkeurige controle.
Belangrijkste Kenmerken
- Planetaire tandwielmotor: hoge kracht, groot koppel en hoge precisie
- Borstelvrije motor + hoge precisie planetaire tandwielreductor
- FOC-besturing (aandrijving/stuurprogramma vereist)
- Dubbele encoders: 18-bits enkele omwenteling absolute magnetische encoder (motorzijde) + 14-bits enkele omwenteling absolute magnetische encoder (reductorzijde)
- Encoder aan de reductorzijde ondersteunt uitvoer absolute waarde van enkele omwenteling en onthoudt het nulpunt na uitschakeling
- RS485 of CAN-buscommunicatie
- Ondersteunt parameterafstelling via PC-software, testen en firmware-upgrade
- Ondersteunt open source ontwikkelingsplatforms: PC, MCU, PLC, industriële computer en Raspberry Pi
- Meerdere bedieningsmodi ondersteund: Koppelmodus, Snelheidsmodus, Multi-turn bedieningsmodus, Single-turn positie + richtingsmodus, Incrementale positie modus, Multi-turn bedieningsmodus (met snelheidslimiet), Single-turn positie + richtingsmodus (met snelheidslimiet), Increment positie modus (met snelheidslimiet)
- Dubbele temperatuursensorinterfaces monitoren de temperaturen van motor en aandrijving in real-time
- Gerelateerde remfunctie (Rem / Remontspanning)
- Vermelde multi-beschermingsfuncties: UVP, OVP, DTP, MTP, OCP, SCP, MSP, LIP
Voor integratieondersteuning en bevestiging vooraf, neem contact op met https://rcdrone.top/ of e-mail [email protected].
Specificaties
| Artikelnaam | MG4005E-i10-V3 |
| Nominale spanning | 24V |
| Maximale snelheid | 320RPM |
| Nominaal koppel | 1 N.m |
| Nominale snelheid | 255RPM |
| Nominale stroom | 1.8A |
| Maximaal vermogen | 65W |
| Maximaal koppel | 2.5 N.m |
| Snelheidsconstante | 106.3rpm/V |
| Koppelconstante | 0.06 N.m/A |
| Omwentelingen | 28 |
| Wikkelingstype | Y |
| Faseweerstand | 1.4Ω |
| Fase-inductantie | 0.5mH |
| Motor Polen | 28 |
| Rotor traagheid | 140gcm² |
| Motor Temperatuur | JA |
| Reducer Type | PG4210 |
| Reductieverhouding | 1:10 |
| Speling | ≤10 arcmin |
| Lagerrated Belastbaarheid | 1000N |
| Motor Gewicht | 183g |
| Aanbevolen Aandrijving | DG40E |
| Aandrijving invoer Spanning | 7.4-32V |
| Communicatie | RS485 of CAN |
| Communicatie Frequentie | RS485: 500Hz (115200bps) / CAN: 2KHz (1Mbps) |
| Encoder | 18-bits (motor) + 14-bits (reducer) magnetische encoder |
| Encoder Baudrate (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| Baudrate (CAN) | 100K, 125K, 250K, 500K, 1M |
| Besturingsmodus | Koppelkring (24KHz) / Snelheidskring (8KHz) / Positiek ring (4KHz) |
| Versnelling curve | Trapezium versnelling |
Interface Definitie
| Interface | Opmerking |
|---|---|
| A/H | RS485-A of CAN-H |
| B/L | RS485-B of CAN-L |
| V- | Negatieve voeding |
| V+ | Positieve voeding |
| A/H | RS485-A of CAN-H |
| B/L | RS485-B of CAN-L |
| T | UART-zender |
| R | UART-ontvanger |
| G | Signaal GND |
Toepassingen
- Humanoïde robots
- Robotarmen
- Exoskeletten / draagbare robots
- Kwadruped robots / robot hond
- AGV-voertuigen / AGV-auto
- ARU-robots
Handleidingen / Bestanden
Details

MG4005E-i10-V3 combineert een borstelloze motor met een planetaire reducer in een compacte vorm voor robotica gewrichten en automatiseringsassen.

Dual single-turn absolute magnetische encoders bieden feedback aan de motorzijde en de uitvoerzijde, met een speciale ID-schakelaar voor busconfiguraties.
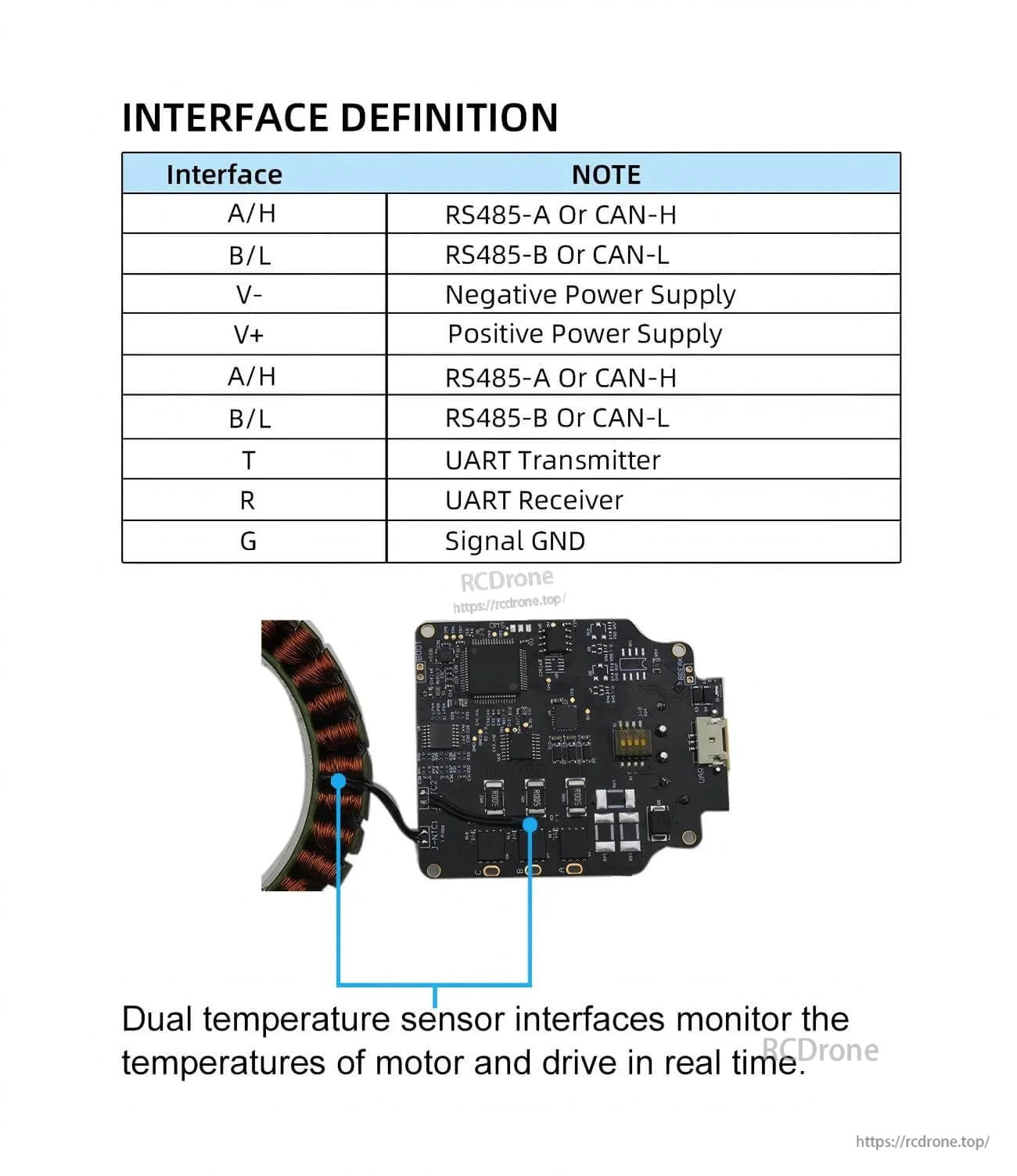
De bedrading is vereenvoudigd met duidelijk gedefinieerde aansluitingen voor voeding, RS485/CAN-communicatie en UART-signaalverbindingen.
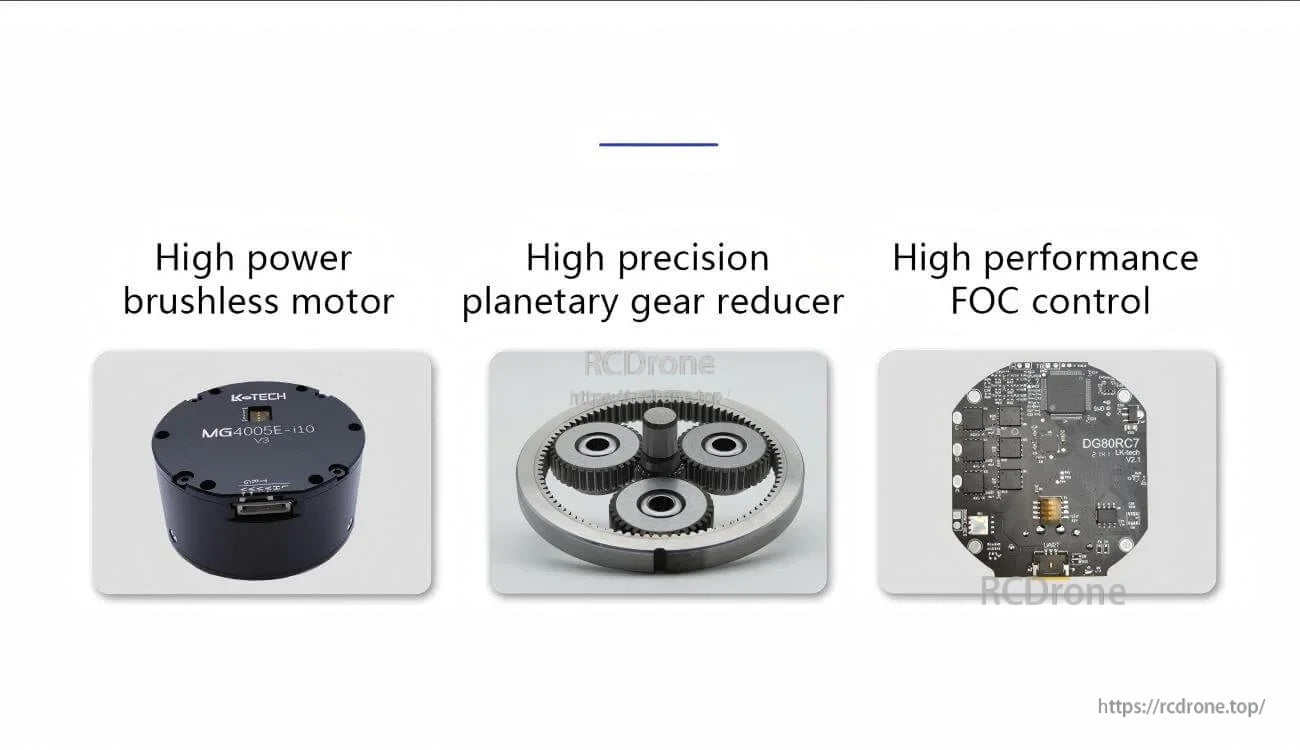
Een borstelloze motor, precisie planetaire tandwielen en FOC-besturing ondersteunen een soepele koppelafgifte en nauwkeurige bewegingscontrole.

De aandrijving ondersteunt RS485 of CAN-communicatie en een breed ingangsvoltagebereik (7,4–32V) voor flexibele integratie.
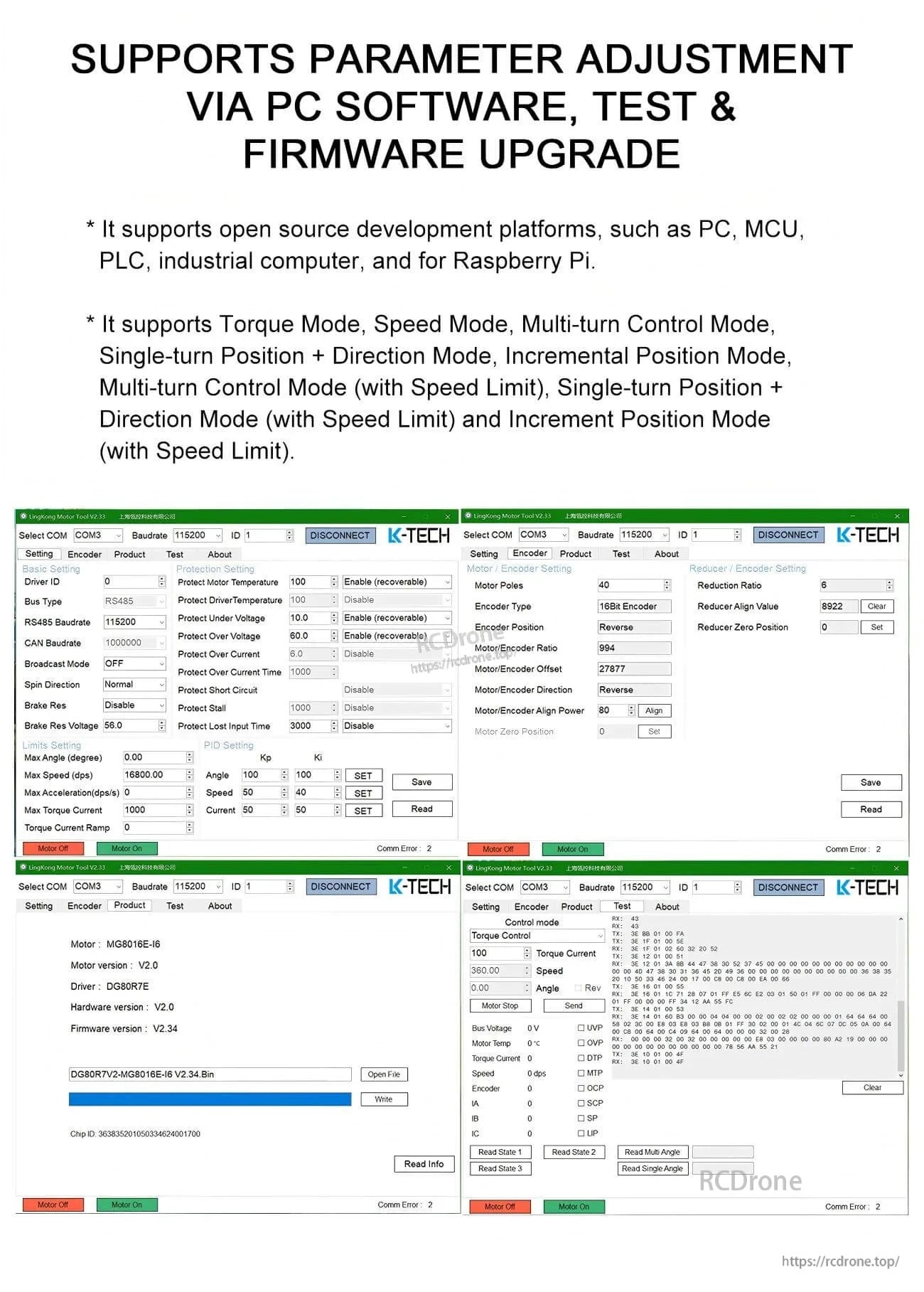
PC-software maakt parameterafstemming, functionele tests en firmware-upgrades mogelijk tijdens inbedrijfstelling en onderhoud.
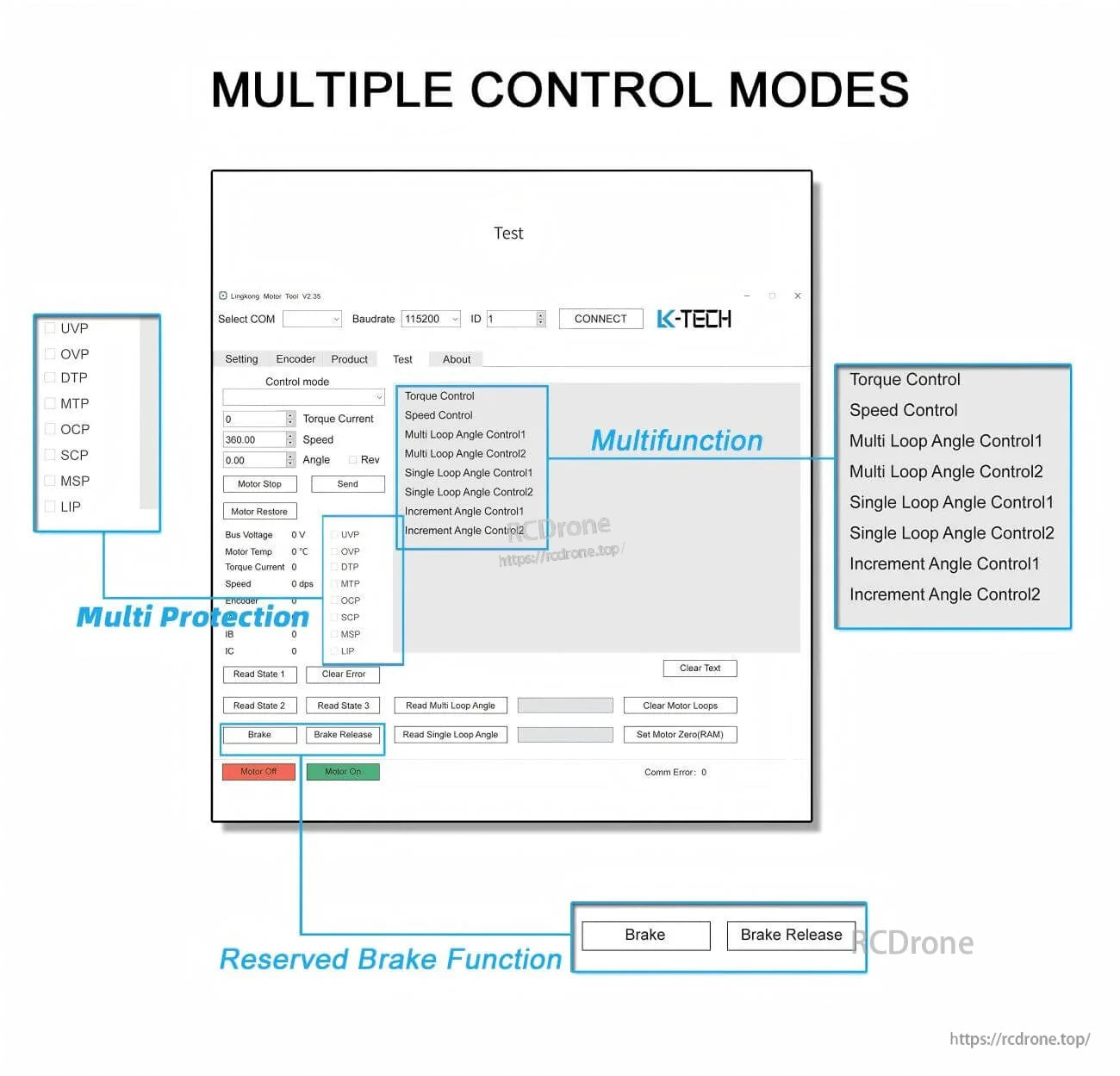
Kies uit meerdere bedieningsmodi zoals koppel-, snelheid- en positiecontrole, met ingebouwde beschermingstatusmonitoring.
Ontworpen voor compacte actuatie in mobiele robots, gearticuleerde armen, viervoeters en draagbare robotica.
Related Collections




