




LKMTECH MG4010E-i10B-V3 planetaire tandwielmotor met rem, 24V 320RPM, RS485/CAN, 18bit encoder
LKMTECH MG4010E-i10B-V3 planetaire tandwielmotor met rem, 24V 320RPM, RS485/CAN, 18bit encoder
LKMTECH
Kan beschikbaarheid voor afhalen niet laden
Overzicht
LKMTECH MG4010E-i10B-V3 motor is een planetaire tandwielmotor met rem, ontworpen voor robotica en automatiseringsactuatoren die een compact formaat, getande koppeloutput en fieldbuscommunicatie (RS485 of CAN) vereisen. Het maakt gebruik van een 18-bits magnetische encoder en ondersteunt koppel-, snelheid- en positiecontrolesystemen.
Belangrijkste Kenmerken
- Twee fasen met remmen planetaire tandwielmotor (MG4010E-i10B serie)
- Tandwielverhouding: 1:10; Tandwielspeling: 8 boogminuten (ook gespecificeerd als ≤8 boogminuten)
- 18-bits enkele omwenteling absolute magnetische encoder (18-bits magnetische encoder)
- Communicatie: RS485 of CAN
- Besturingsmodi/lussen: Koppel Loop (32KHz) / Snelheid Loop (8KHz) / Positie Loop (4KHz)
- Versnellingscurve: Trapeziumversnelling
- Ingebouwde rem; Remtype BG4906; Remkoppel 3.2 N.m
- Interface functies: ID-schakelaar
- Stuurgerelateerde tekst weergegeven: Ingebouwde rem; RS485 of CAN-buscommunicatie; Dubbele encoders, onthoud nulpunt na uitschakelen; Ingangsspanning 12-60V
Specificaties
| Artikelnaam | MG4010E-i10B-V3 |
| Nominale spanning | 24V |
| Maximale snelheid | 320RPM |
| Nominale snelheid | 260RPM |
| Nominaal koppel | 2.5N.m |
| Maximaal koppel | 4.5N.m |
| Nominale stroom | 3.5A |
| Maximaal vermogen | 140W |
| Snelheidsconstante | 108.3rpm/V |
| Koppelconstante | 0.07N.m/A |
| Turns | 14 |
| Winding Type | Y |
| Faseweerstand | 0.604Ω |
| Fase-inductantie | 0.28mH |
| Motorpolen | 28 |
| Rotorinertie | 202gcm² |
| Motortemperatuur | JA |
| Reducer Type | PG4210 |
| Reductieverhouding | 1:10 |
| Speling | ≤8 arcmin |
| Lagerrated belasting | 1000N |
| Motorgewicht | 392g |
| Remtype | BG4906 |
| Remkoppel (N.m) | 3.2N.m |
| Startspanning (V) | 24V |
| Ondersteunende spanning (V) | 7V |
| Ondersteunend vermogen (W) | 1.4W |
| Aanbevolen aandrijving | DG40 |
| Aansluitspanning aandrijving | 7.4-32V |
| Communicatie | RS485 OF CAN |
| Communicatie Frequentie | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) |
| Encoder | 18-bits Magnetische Encoder |
| Encoder Baudrate(RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| Baudrate(CAN) | 100K, 125K, 250K, 500K, 1M |
| Besturingsmodus | Torque Loop(32KHz)/Snelheidsloop(8KHz)/Positieloop(4KHz) |
| Versnelling curve | Trapezium versnelling |
| Motor grootte | Φ 59*37 |
| Versnellingsspeling | 8 arcmin |
Interface Definitie
- ID schakelaar
| Poort | Instructies |
|---|---|
| A/H | RS485-A of CAN-H |
| B/L | RS485-B of CAN-L |
| V- | Negatieve Voedingsspanning |
| V+ | Positieve Voedingsspanning |
| A/H | RS485-A of CAN-H |
| B/L | RS485-B of CAN-L |
| T | UART Zender |
| R | UART Ontvanger |
| G | Signaal GND |
Toepassingen
- Humanoïde Robots
- Robotarmen
- Exoskeletten / Exoskelet robot
- Kwadruped Robots / Mecha Hond
- AGV Voertuigen / AGV auto
- ARU Robots
- Servicerobot
- Handheld lidar
- Revalidatietrainingsrobot
- Inspectierobot
Handleidingen
Voor integratieondersteuning en vragen voor de verkoop, neem contact op met [email protected] or bezoek https://rcdrone.top/.
Details

Een compacte MG4010E-i10B-V3 planetaire versnellingsmotor met geïntegreerde rem, 1:10 reductie en ≤8 arcmin speling voor precieze robotica gewrichten.
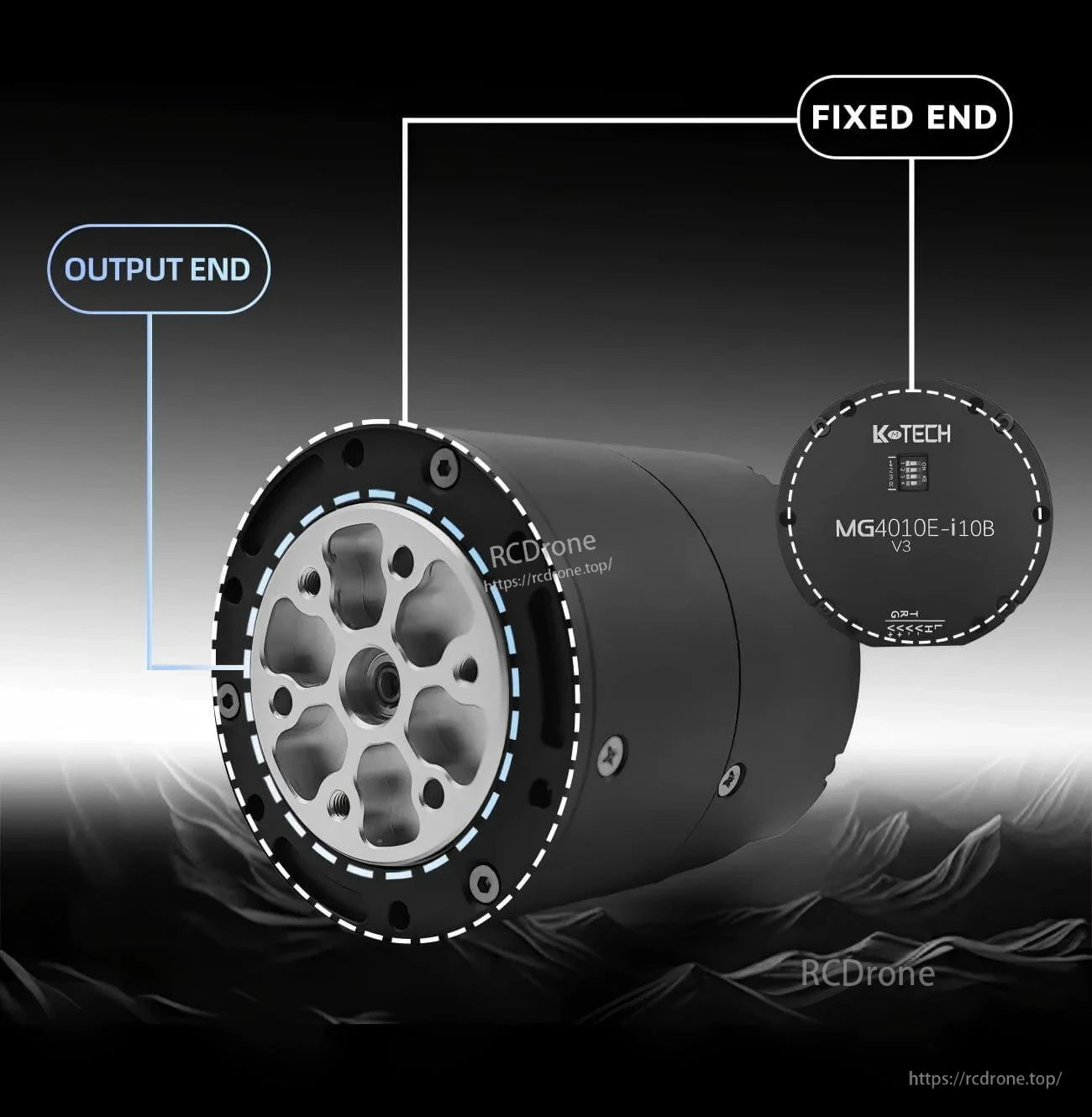
Duidelijke identificatie van het uitgangseinde versus het vaste einde helpt bij het vereenvoudigen van de mechanische indeling en bedrading tijdens integratie.

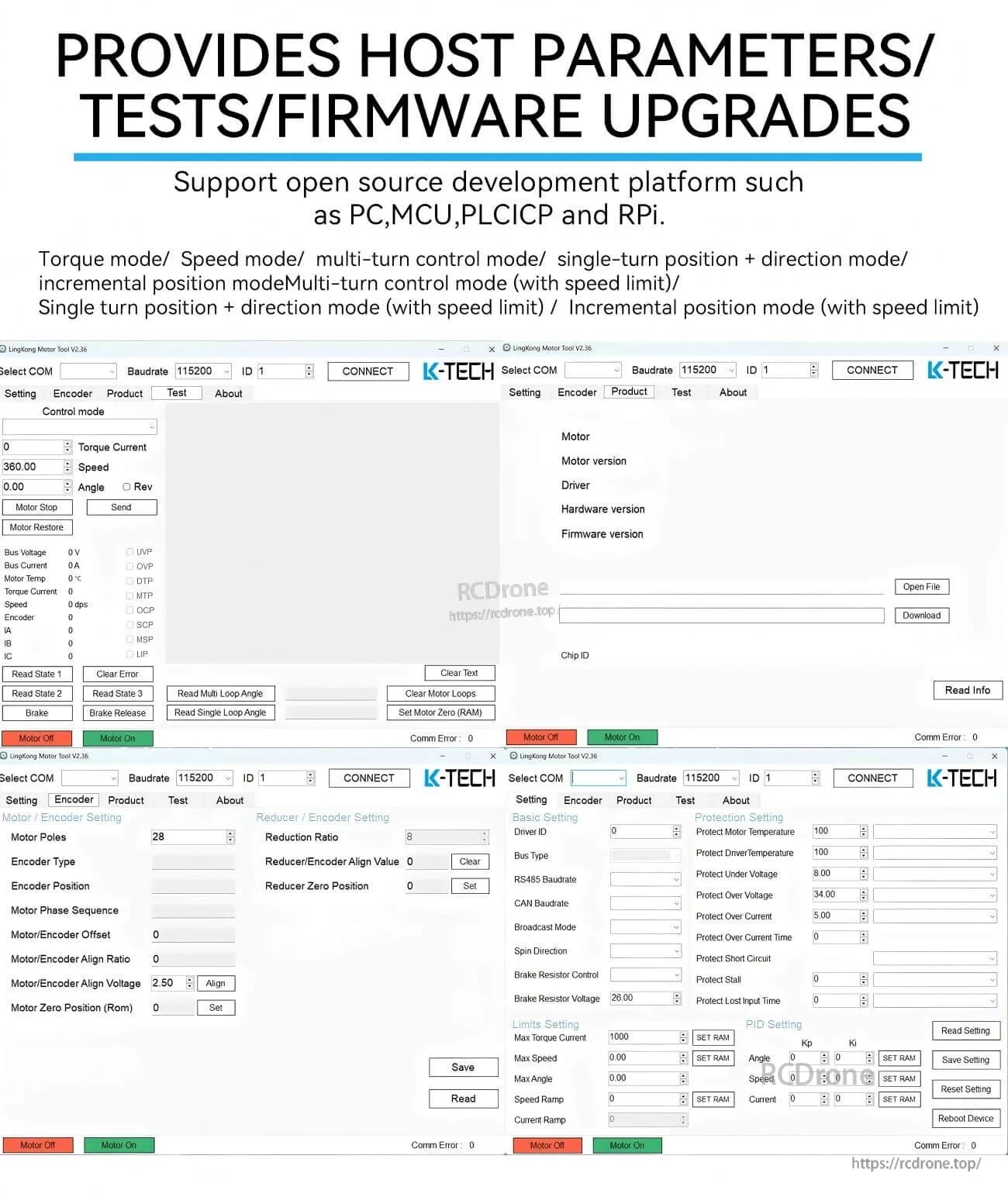
Een 18-bits enkele omwenteling absolute magnetische encoder en RS485/CAN bus ondersteunen koppel-, snelheid- en positiecontrole voor automatiseringsactuatoren.
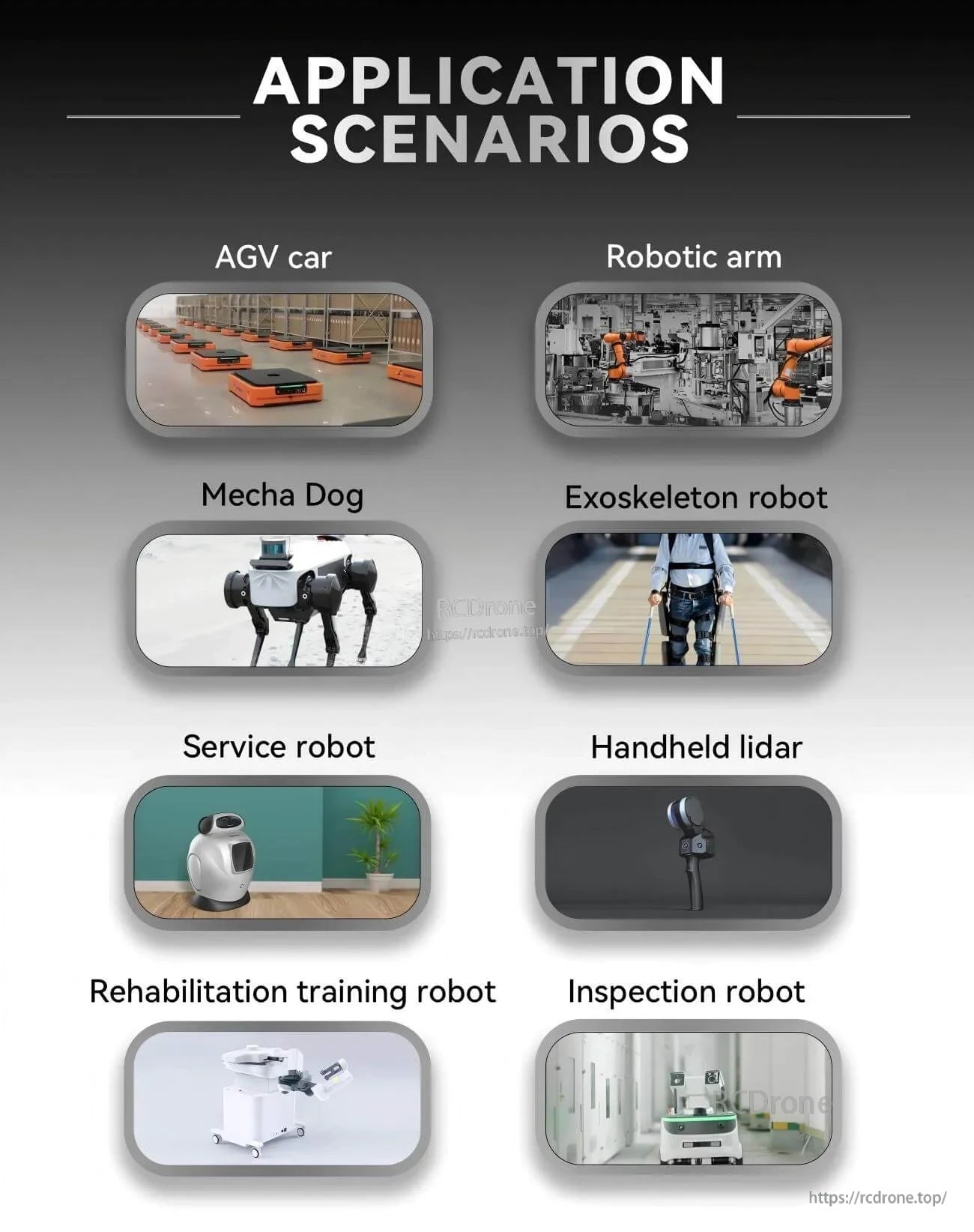
Ontworpen voor robotica en automatiseringstoepassingen, waaronder AGV's, robotarmen, viervoetige robots, exoskeletten en inspectieplatforms.
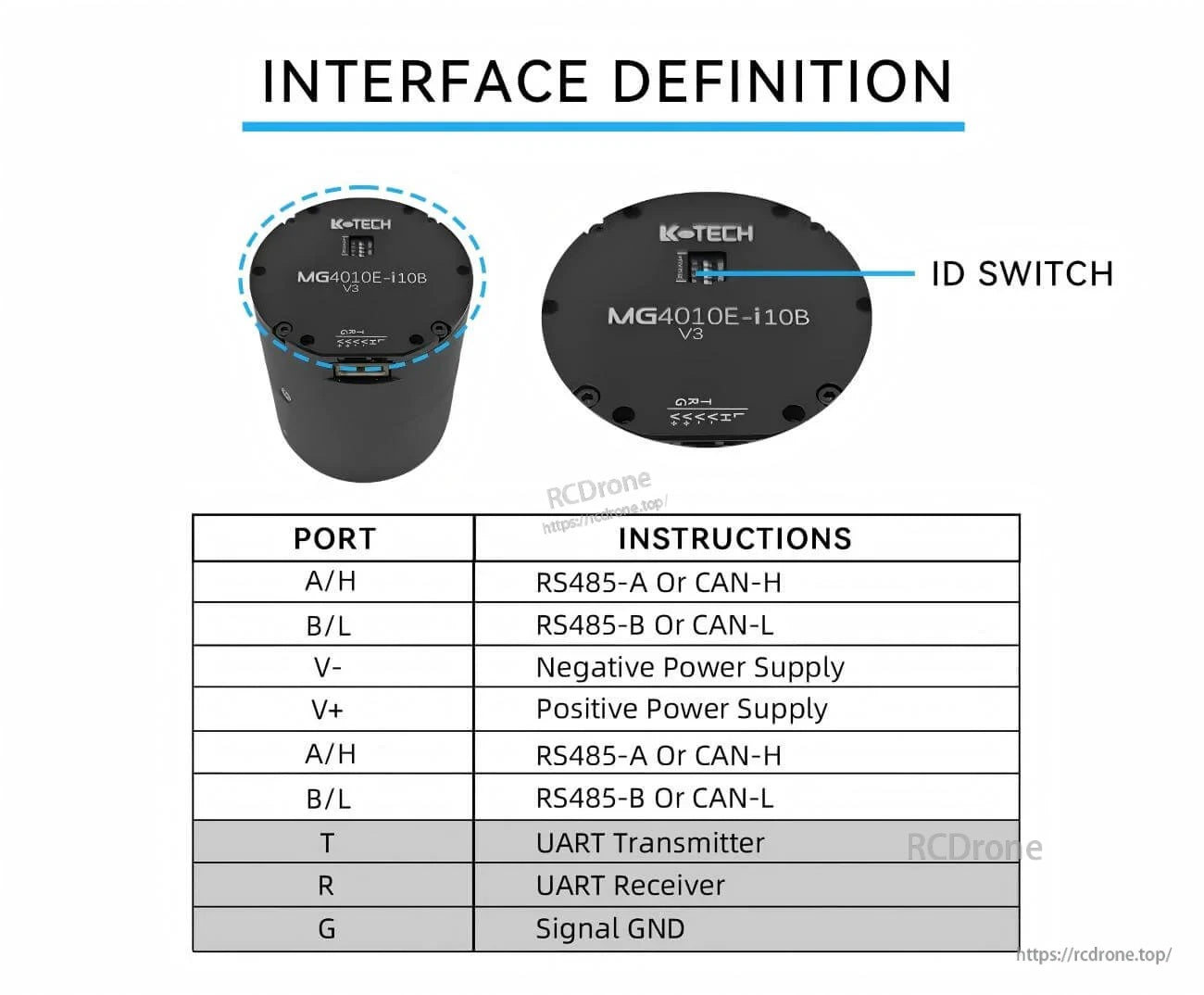
Poortmapping omvat RS485-A/CAN-H en RS485-B/CAN-L, plus voeding, UART TX/RX, signaalgrond en een onboard ID-schakelaar.

Related Collections




