




LKMTECH MG4010E-i36-V3 Planetaire Tandwielmotor 24V 1:36 RS485/CAN Magnetische Encoder voor Robotica
LKMTECH MG4010E-i36-V3 Planetaire Tandwielmotor 24V 1:36 RS485/CAN Magnetische Encoder voor Robotica
LKMTECH
Kan beschikbaarheid voor afhalen niet laden
Overzicht
De LKMTECH MG4010E-i36-V3 Motor is een planetaire tandwielmotor ontworpen voor robotica en motion-control actuators. Het combineert een borstelloze motor, planetaire reducer en magnetische encoder, met communicatiemogelijkheden vermeld als RS485 of CAN.
Belangrijkste Kenmerken
- Planetaire tandwielmotor (MG4010E-i36, V3).
- Tandwielverhouding: 1:36 (ook weergegeven als “Tandwielverhouding 1:36”).
- Tandwielspeling: 7 arcmin (afbeelding label) / 12 arcmin (specificatietabel).
- Encoder: 18bit enkele omwenteling absolute magnetische encoder (afbeelding tekst); ook vermeld als 18bit (motor) + 14bit (reducer) magnetische encoder (specificatietabel).
- Communicatie: RS485 of CAN.
- Aandrijving/FOC-driver genoemd (afbeelding tekst: “Hoge prestaties FOC-driver”).
- Ingebouwde rem (afbeelding tekst/UI label).
- Hostparameters/tests/firmware-upgrades ondersteund (afbeelding tekst).
Specificaties
| Artikelnaam | MG4010E-i36-V3 |
| Nominale spanning | 24V |
| Maximale snelheid | 90RPM |
| Nominale snelheid | 77RPM |
| Nominale stroom | 2.4A |
| Maximaal vermogen | 132W |
| Nominaal koppel | 6 N.m (spec tabel) / 9 N.m (afbeelding label) |
| Maximaal koppel | 13 N.m (spec tabel) / 18 N.m (afbeelding label) |
| Snelheidsconstante | 3 rpm/V |
| Koppelconstante | 2.58 N.m/A |
| Omwentelingen | 14 |
| Wikkelingstype | Y |
| Faseweerstand | 0.68 Ω |
| Fase Inductantie | 0.25 mH |
| Motor Polen | 28 |
| Rotor traagheid | 158 gcm² |
| Motor Temperatuur | JA |
| Reducer Type | PG5336 |
| Reductieverhouding | 1:36 |
| Speling | ≤12 arcmin (spec tabel) / 6 arcmin (afbeelding label) |
| Lagere Rated Load | 1120 N |
| Motor Gewicht | 378 g |
| Aanbevolen Aandrijving | DG40E |
| Aandrijving invoer Spanning | 12-24V (spec tabel) / 12-60V (afbeelding label) |
| Communicatie | RS485 OF CAN |
| Communicatie Frequentie | RS485: 500 Hz (115200 bps) / CAN: 2 KHz (1 Mbps) |
| Encoder | 18bit (motor) + 14bit (reducer) Magnetische Encoder |
| Encoder Baudrate (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2 Mbps |
| Baudrate (CAN) | 100K, 125K, 250K, 500K, 1M |
| Besturingsmodus | Koppelkring (24 KHz) / Snelheidskring (8 KHz) / Positiekring (4 KHz) |
| Versnellingcurve | Trapeziumversnelling |
| Motorformaat | Φ 53*54.5 (afbeelding label) |
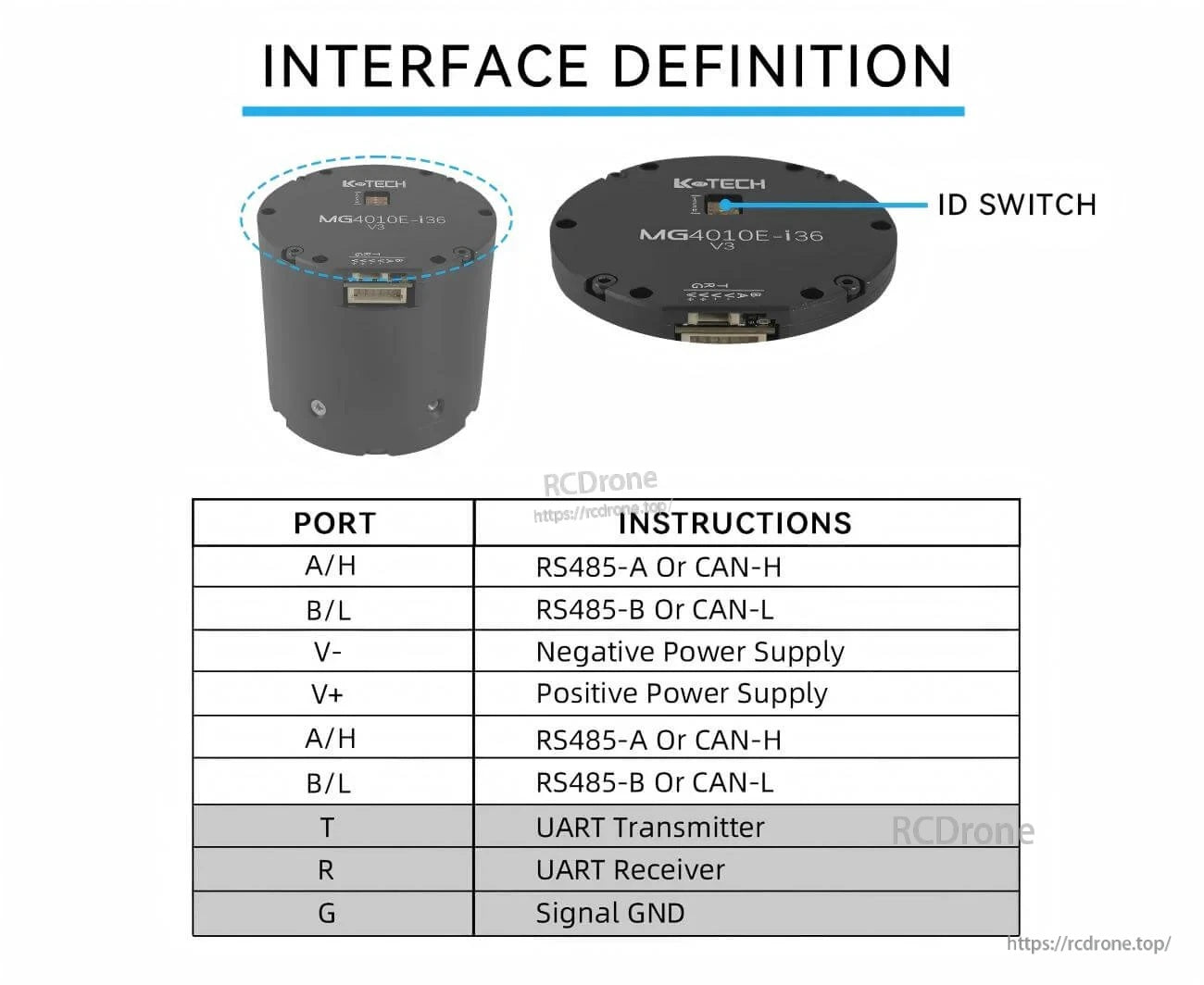
Interface Definitie
- ID schakelaar (afbeelding label: “ID SCHAKELAAR”).
| Poort | Instructies |
|---|---|
| A/H | RS485-A of CAN-H |
| B/L | RS485-B of CAN-L |
| V- | Negatieve Voedingsspanning |
| V+ | Positieve Voedingsspanning |
| T | UART Zender |
| R | UART Ontvanger |
| G | Signaal GND |
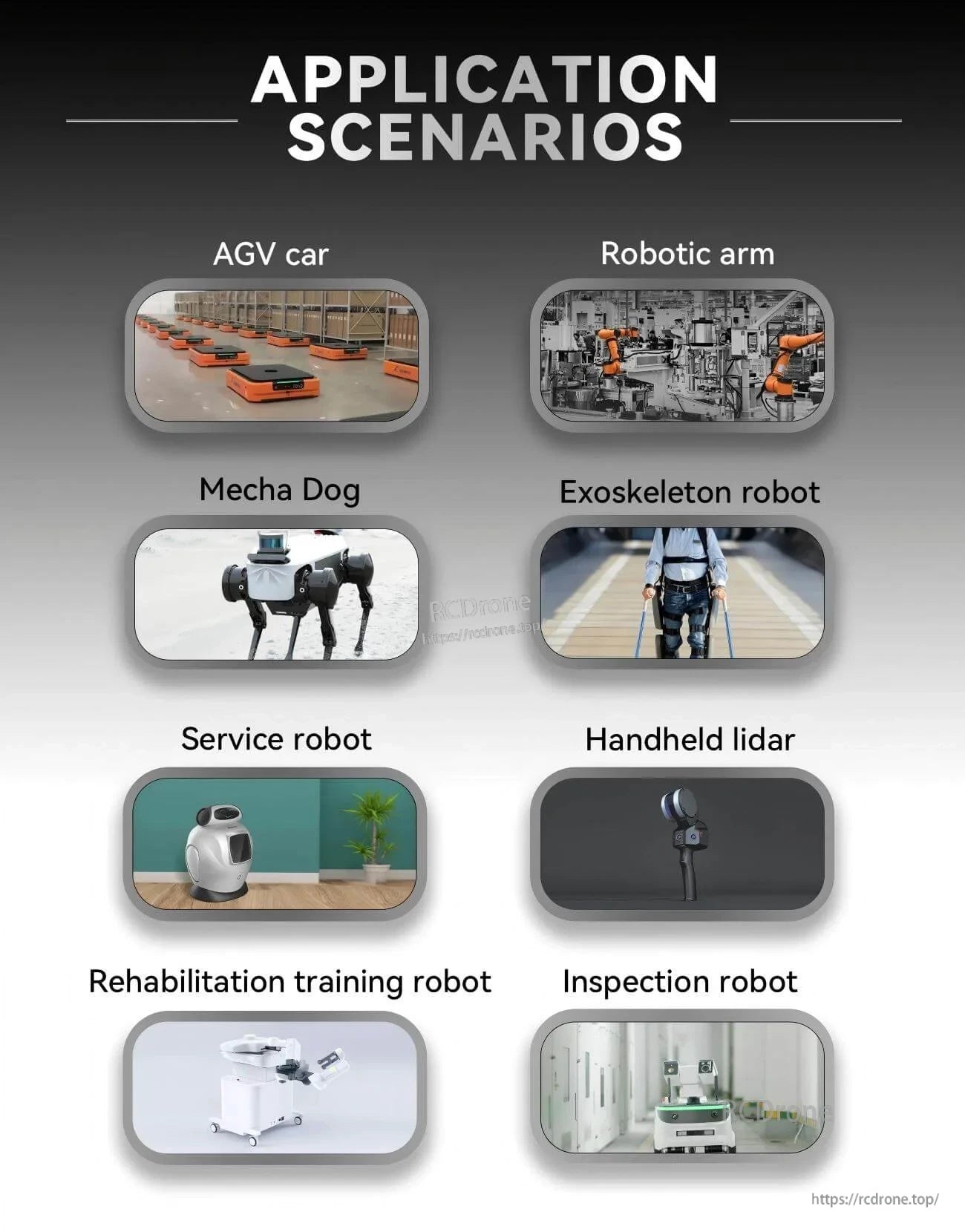
Toepassingsscenario's
- Humanoïde Robots
- Robotarmen
- Exoskeletten
- Kwadruped Robots
- AGV Voertuigen / AGV auto
- ARU Robots
- Mecha Hond
- Servicerobot
- Handheld lidar
- Revalidatietrainingsrobot
- Inspectierobot
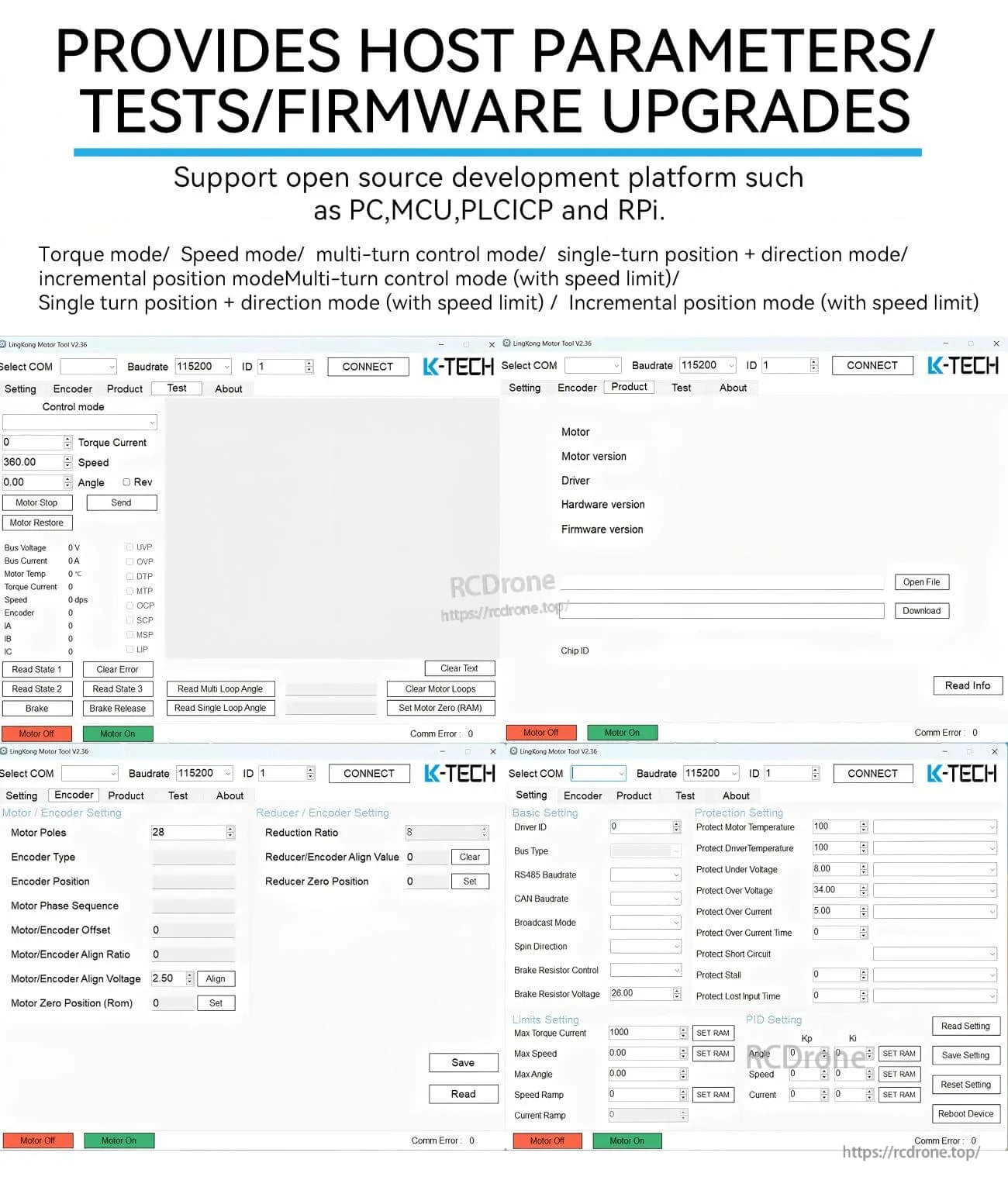
Controle & Software Notities
- Ondersteunt open source ontwikkelingsplatforms zoals PC, MCU, PLC, ICP en RPi.
- Vermelde modi (afbeeldingstekst): Koppelmodus, Snelheidsmodus, multi-turn controlemodus, single-turn positie + richting modus, incrementele positie modus; versies met snelheidslimiet worden ook weergegeven.
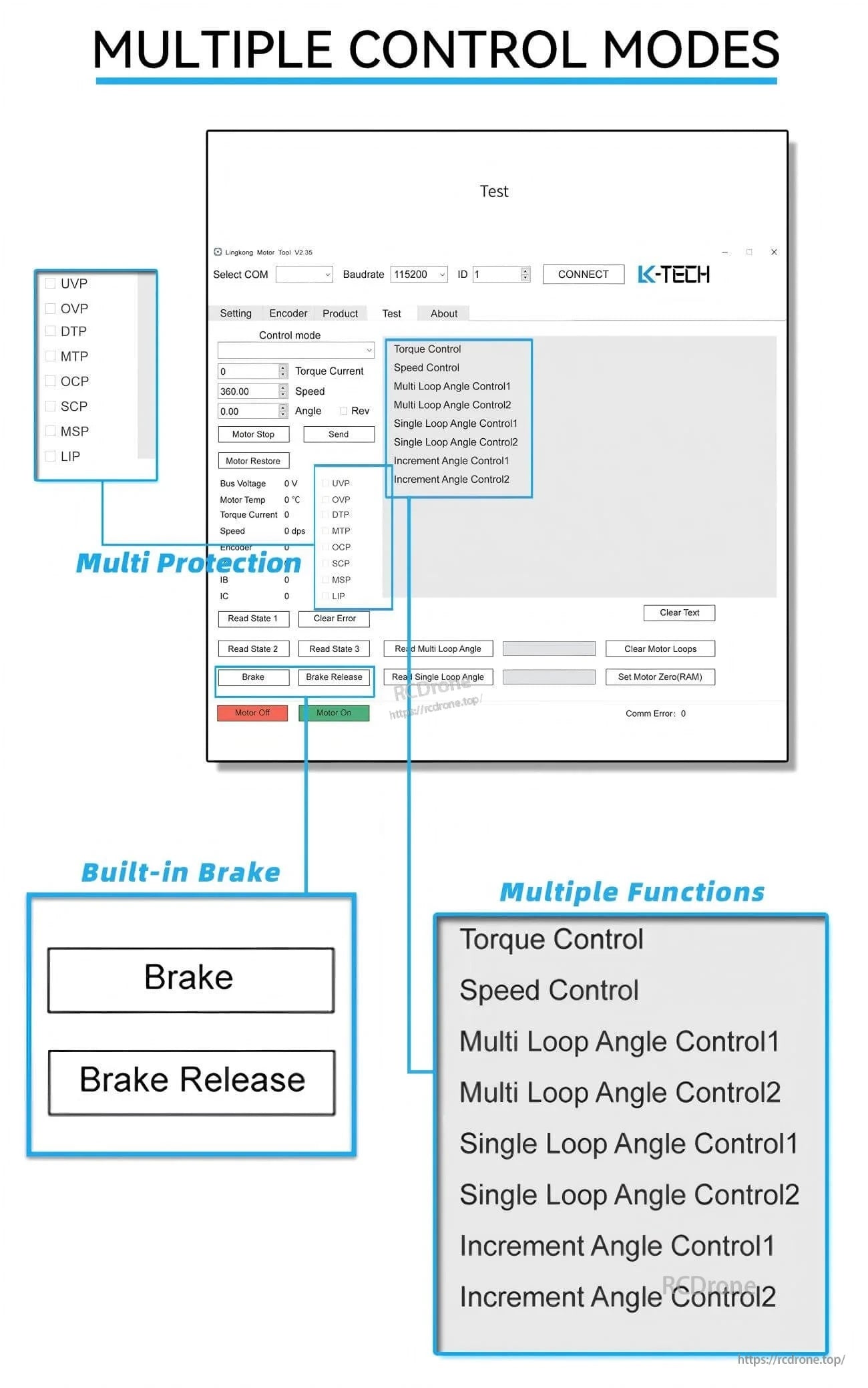
- Meerdere controlemodi weergegeven in de UI: Koppelcontrole, Snelheidscontrole, Multi Loop Hoek Controle1, Multi Loop Hoek Controle2, Single Loop Hoek Controle1, Single Loop Hoek Controle2, Incrementele Hoek Controle1, Incrementele Hoek Controle2.
- Multi-beschermingslabels weergegeven: UVP, OVP, DTP, MTP, OCP, SCP, MSP, LIP.
- Ingebouwde remcontroles weergegeven: Rem, Remontspanning.
Voor compatibiliteitscontroles voor de verkoop (RS485/CAN-integratie, baudrate-selectie) of hulp bij bestands toegang, neem contact op [email protected] or bezoek https://rcdrone.top/.
Handleidingen / Documenten
Details

De MG4010E-i36-V3 combineert een borstelloze motor, planetair reductie en magnetische encoder voor compacte robotactuatoren.
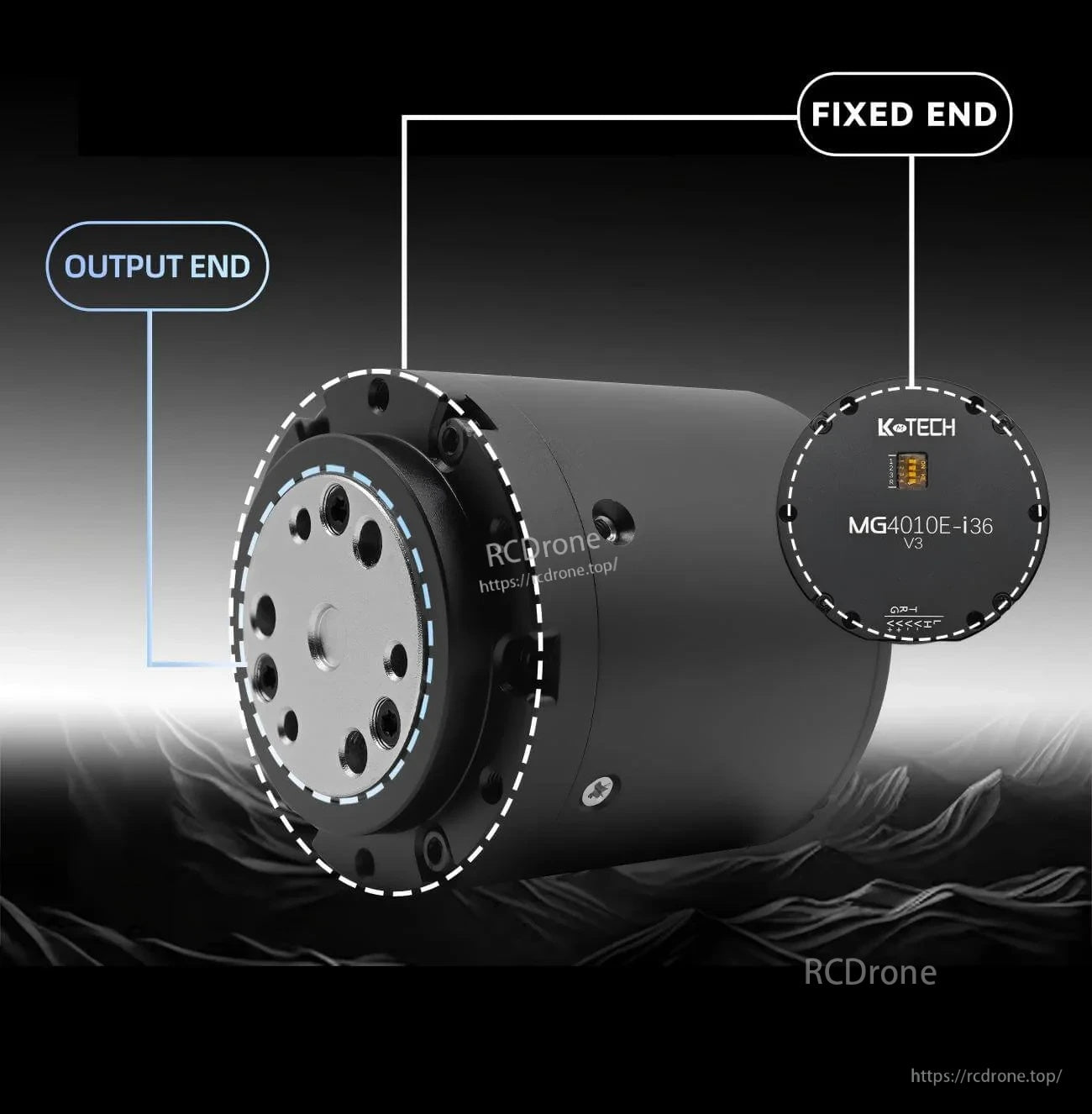
Een flensstijl output einde en vaste eindindeling maakt integratie gemakkelijker in armen, benen en andere gewrichtmodules.

RS485 of CAN communicatie koppelt met een FOC-driver en absolute magnetische encoder feedback voor stabiele koppel-, snelheid- en positiecontrole.
Veelvoorkomende gebruikstoepassingen zijn AGV's, robotarmen, viervoetige platforms, exoskeletten en inspectie- of service robots.
Bedrading is vereenvoudigd met gelabelde RS485/CAN-bus pinnen, stroomverbindingen, UART Tx/Rx, signaalgrond en een onboard ID-schakelaar.
Ingebouwde remregeling en meerdere bedieningsmodi helpen het gedrag af te stemmen op verschillende taken voor bewegingsbesturing en veiligheidsvereisten.
Related Collections




