




LKMTECH MG4010E-i36B-V3 Motor 24V 1:36 Planetaire Tandwielmotor met Rem, RS485/CAN, Magnetische Encoder
LKMTECH MG4010E-i36B-V3 Motor 24V 1:36 Planetaire Tandwielmotor met Rem, RS485/CAN, Magnetische Encoder
LKMTECH
Kan beschikbaarheid voor afhalen niet laden
Overzicht
De LKMTECH MG4010E-i36B-V3 Motor is een planetaire tandwielmotor met geïntegreerde rem en encoderfeedback, ontworpen voor robotica-actuatie waar nauwkeurige koppel/snelheid/positiecontrole en compacte integratie vereist zijn. Het ondersteunt RS485 of CAN-communicatie en is gespecificeerd met een PG4210-reducer (1:36) en dubbele magnetische encoder (18-bits motor + 14-bits reducer).
Belangrijkste Kenmerken
- Planetaire reducer: PG4210, reductieverhouding 1:36, speling ≤12 boogminuten
- Encoder: 18-bits (motor) + 14-bits (reducer) magnetische encoder
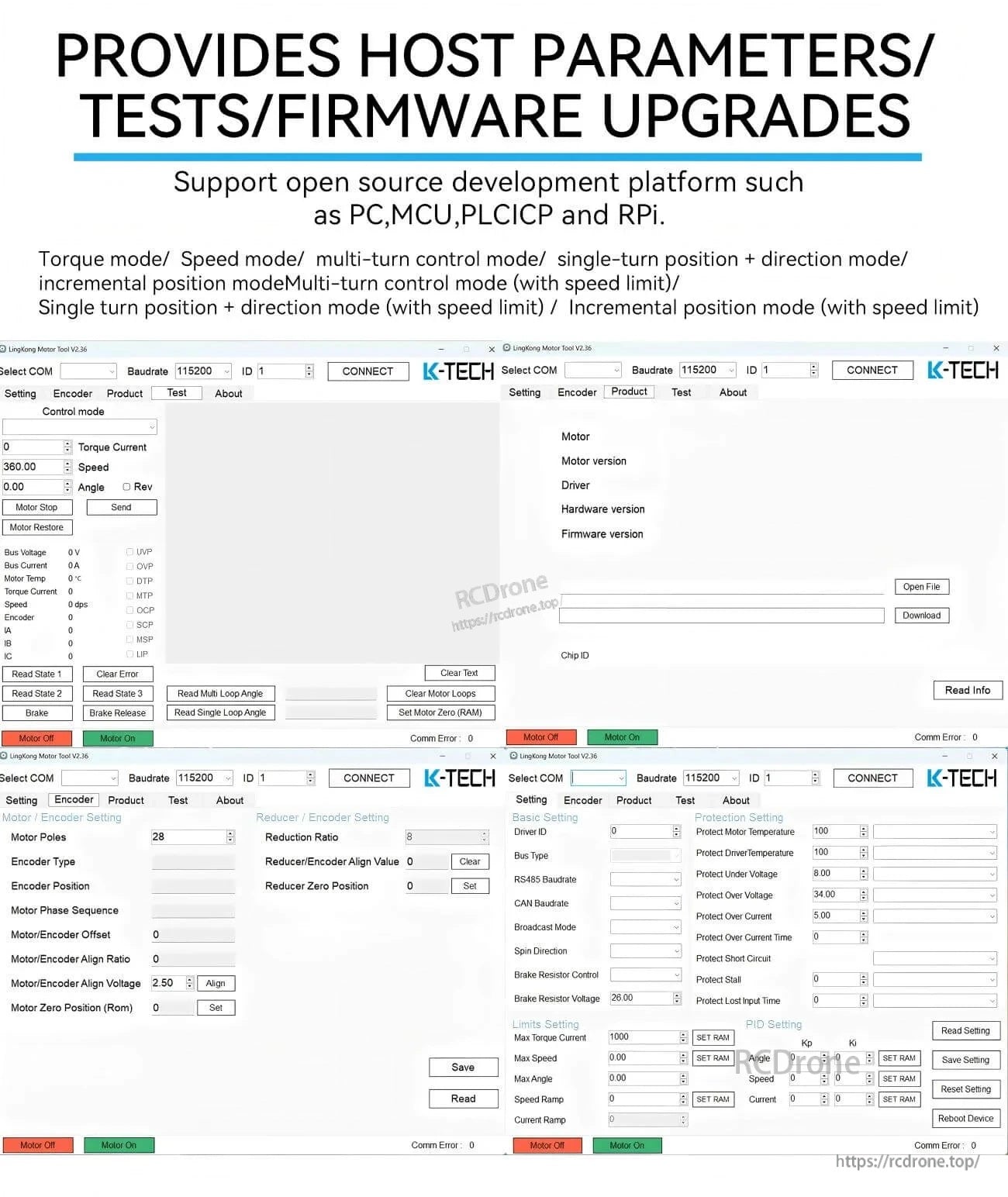
- Communicatie: RS485 of CAN
- Regellussen: Koppel Loop (32KHz) / Snelheid Loop (8KHz) / Positie Loop (4KHz)
- Versnellingscurve: Trapeziumversnelling
- Rem: BG4906, remkoppel 0.6N.m
- Motortemperatuur: JA
Technische specificaties
| Artikelnaam | MG4010E-i36B-V3 |
| Nominale spanning | 24V |
| Maximale snelheid | 90RPM |
| Nominale snelheid | 77RPM |
| Nominaal koppel | 6N.m |
| Maximaal koppel | 13N.m |
| Nominale stroom | 2.4A |
| Maximaal vermogen | 132W |
| Snelheidsconstante | 3rpm/V |
| Koppelconstante | 2.58N.m/A |
| Omwentelingen | 14 |
| Wikkelingstype | Y |
| Faseweerstand | 0.68Ω |
| Fase-inductantie | 0.25mH |
| Motor Polen | 28 |
| Rotor inertie | 158gcm² |
| Motortemperatuur | JA |
| Reducer Type | PG4210 |
| Reductieverhouding | 1:36 |
| Speling | ≤12 arcmin |
| Lagerrated belasting | 1120N |
| Motorgewicht | 542.5g |
| Remtype | BG4906 |
| Remkoppel (N.m) | 0.6N.m |
| Startspanning (V) | 24V |
| Ondersteunende spanning (V) | 7V |
| Ondersteunend vermogen (W) | 1.4W |
| Aanbevolen aandrijving | DG40E |
| Aandrijving invoerspanning | 7.4-32V |
| Communicatie | RS485 OF CAN |
| Communicatie Frequentie | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) |
| Encoder | 18bit(motor)+14bit(reducer) Magnetische Encoder |
| Encoder Baudrate (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| Baudrate (CAN) | 100K, 125K, 250K, 500K, 1M |
| Besturingsmodus | Koppelkring (32KHz)/Snelheidskring (8KHz)/Positiekring (4KHz) |
| Versnelling curve | Trapezium versnelling |
Interface Definitie (Poorten)
Poort betekenissen weergegeven voor deze motor serie:
- A/H: RS485-A of CAN-H
- B/L: RS485-B of CAN-L
- V-: Negatieve Voedingsspanning
- V+: Positieve Voedingsspanning
- T: UART-zender
- R: UART-ontvanger
- G: Signaal GND
- ID-schakelaar
Toepassingen
- Humanoïde robots
- Robotarmen
- Exoskeletten
- Kwadruped robots
- AGV-voertuigen
- ARU-robots
Handleidingen / Documenten
Voor integratieondersteuning en pre-sales compatibiliteitscontroles, neem contact op [email protected] or bezoek https://rcdrone.top/.
Details

Compact planetair gearmotor lichaam integreert de rem en de onboard interface in een enkele actuator pakket.
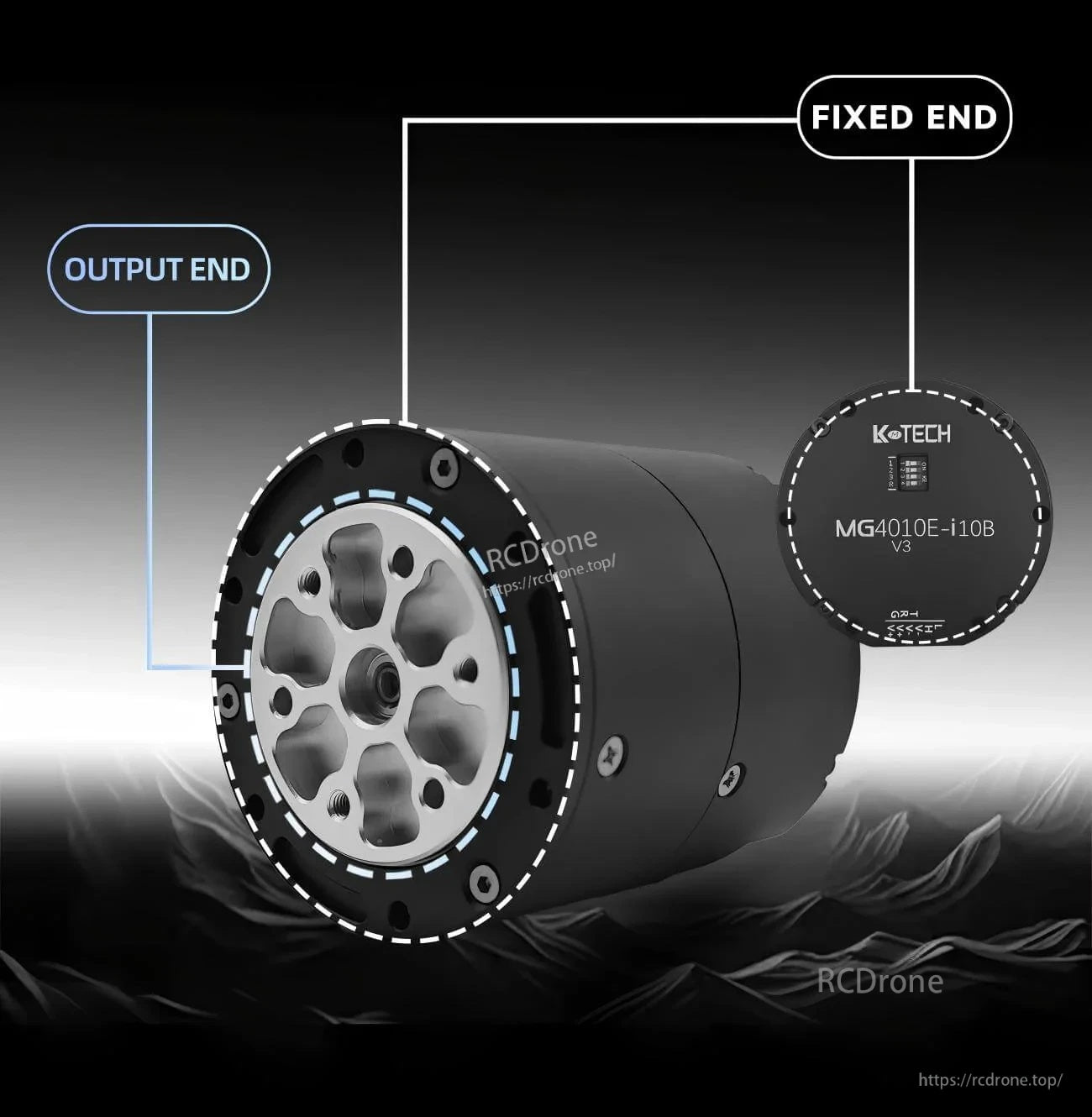
Een duidelijk gedefinieerde output eind en vaste eind helpt bij het vereenvoudigen van mechanische integratie en uitlijning in assemblages.

Encoder feedback en buscommunicatie ondersteunen stabiele koppel-, snelheid- en positiecontrole voor robotica gewrichten.
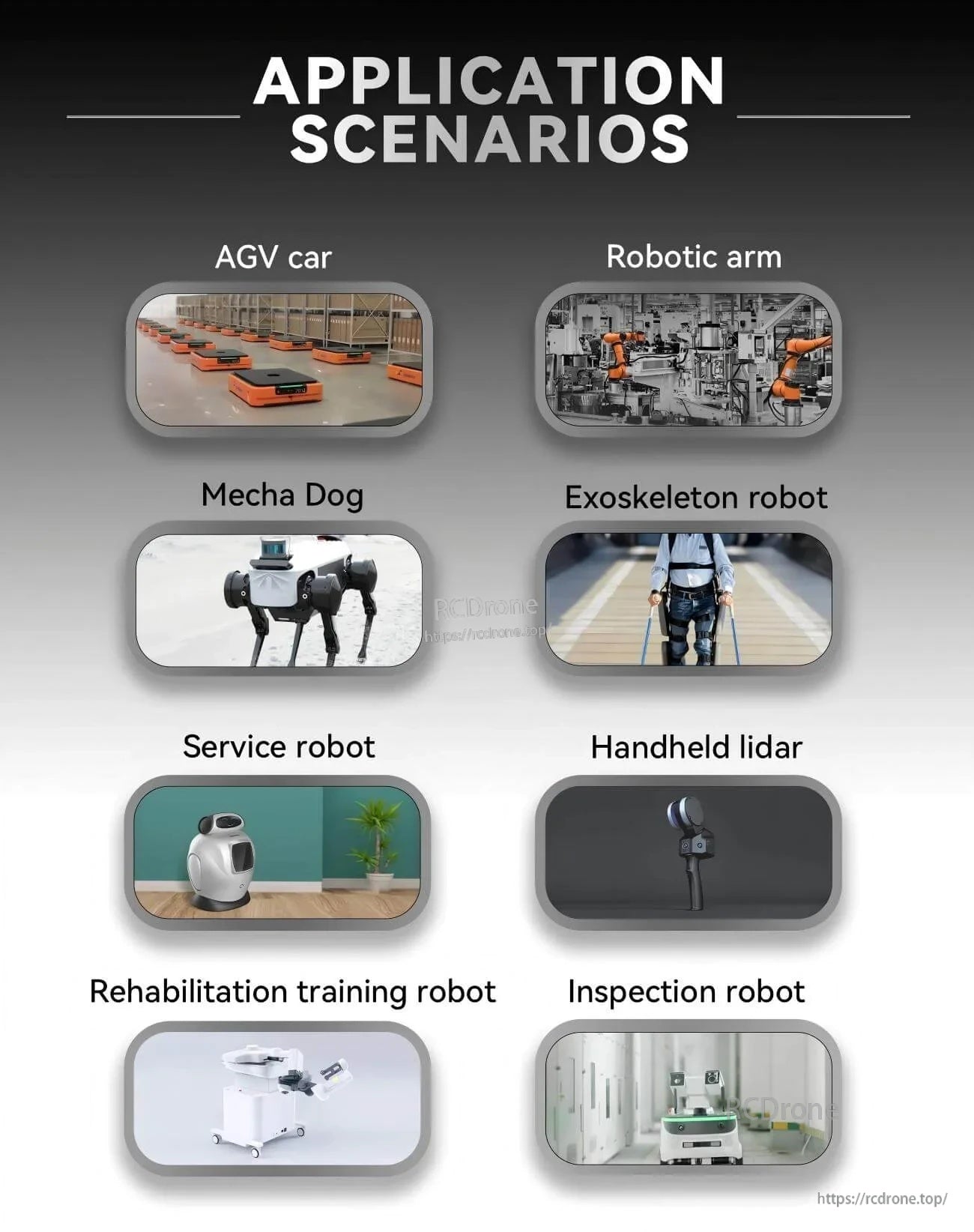
Ontworpen voor robotactuatietaken van AGV's en robotarmen tot looprobots en exoskelet systemen.
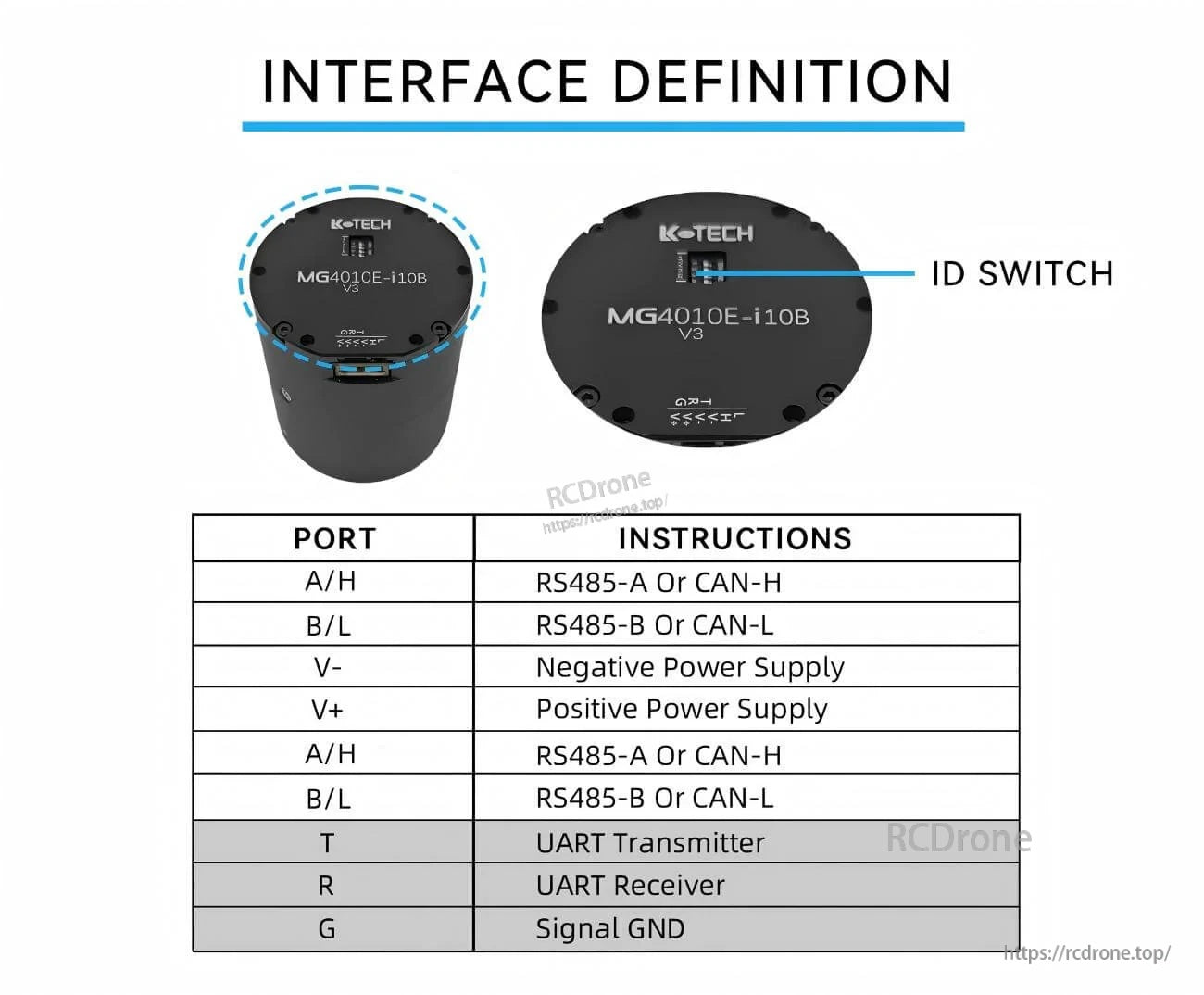
Poortdefinities dekken stroom, RS485/CAN bedrading en UART-pinnen, met een onboard ID-schakelaar voor adressering.

Related Collections




