MATEK M10-L4-3100 GPS-module - Mateksys AP_PERIPH GNSS u-blox MAX-M10S RM3100
MATEK M10-L4-3100 GPS-module - Mateksys AP_PERIPH GNSS u-blox MAX-M10S RM3100
MATEKSYS
Kan beschikbaarheid voor afhalen niet laden
MATEK M10-L4-3100 - Mateksys AP_PERIPH GNSS-SPECIFICATIES
Gebruik: Voertuigen en speelgoed met afstandsbediening
Aanbevolen leeftijd: 12+j,14+j,6-12j
Herkomst: Vasteland van China
Materiaal: Composietmateriaal
Merknaam: MATEKSYS
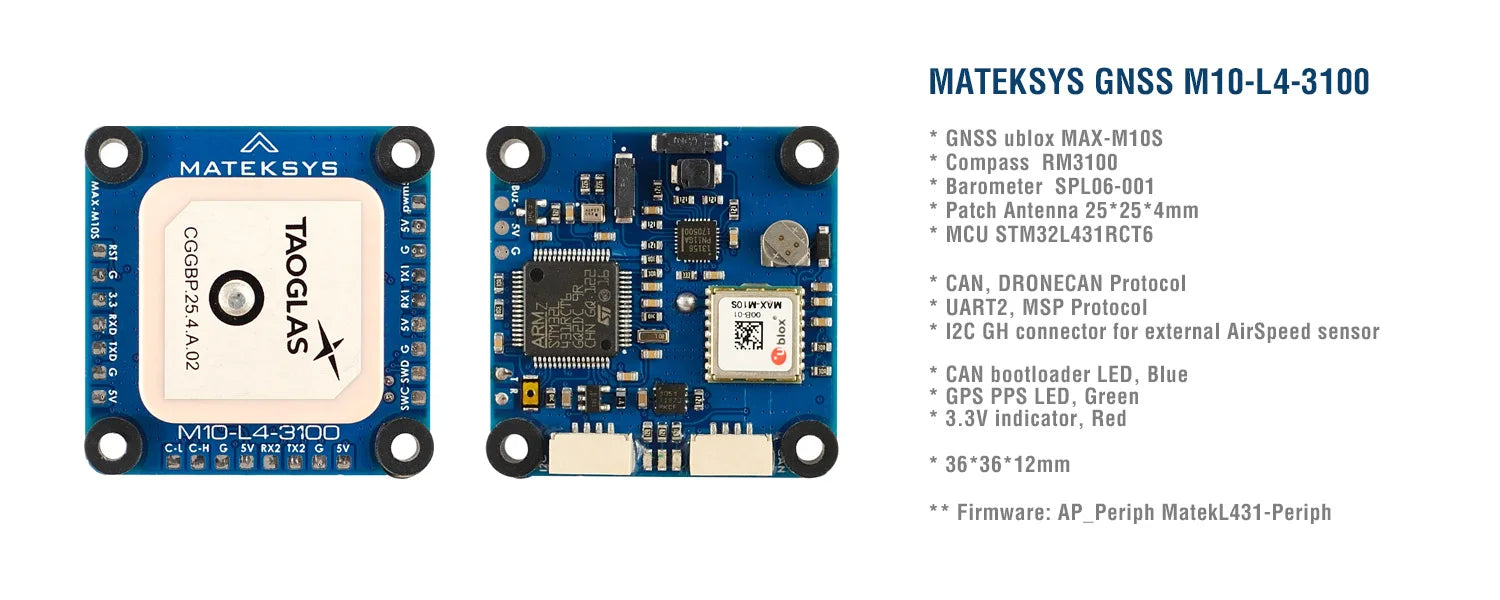
AP_PERIPH GNSS M10-L4-3100
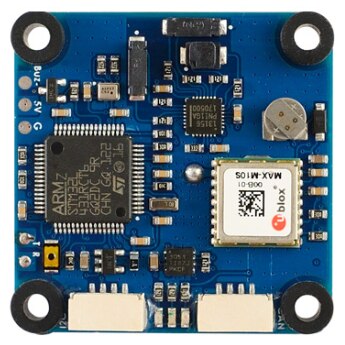
AP_Periph L431 CAN-knooppunt, MAX-M10S, RM3100, SPL06-001, DroneCAN-protocol en UART_MSP
-
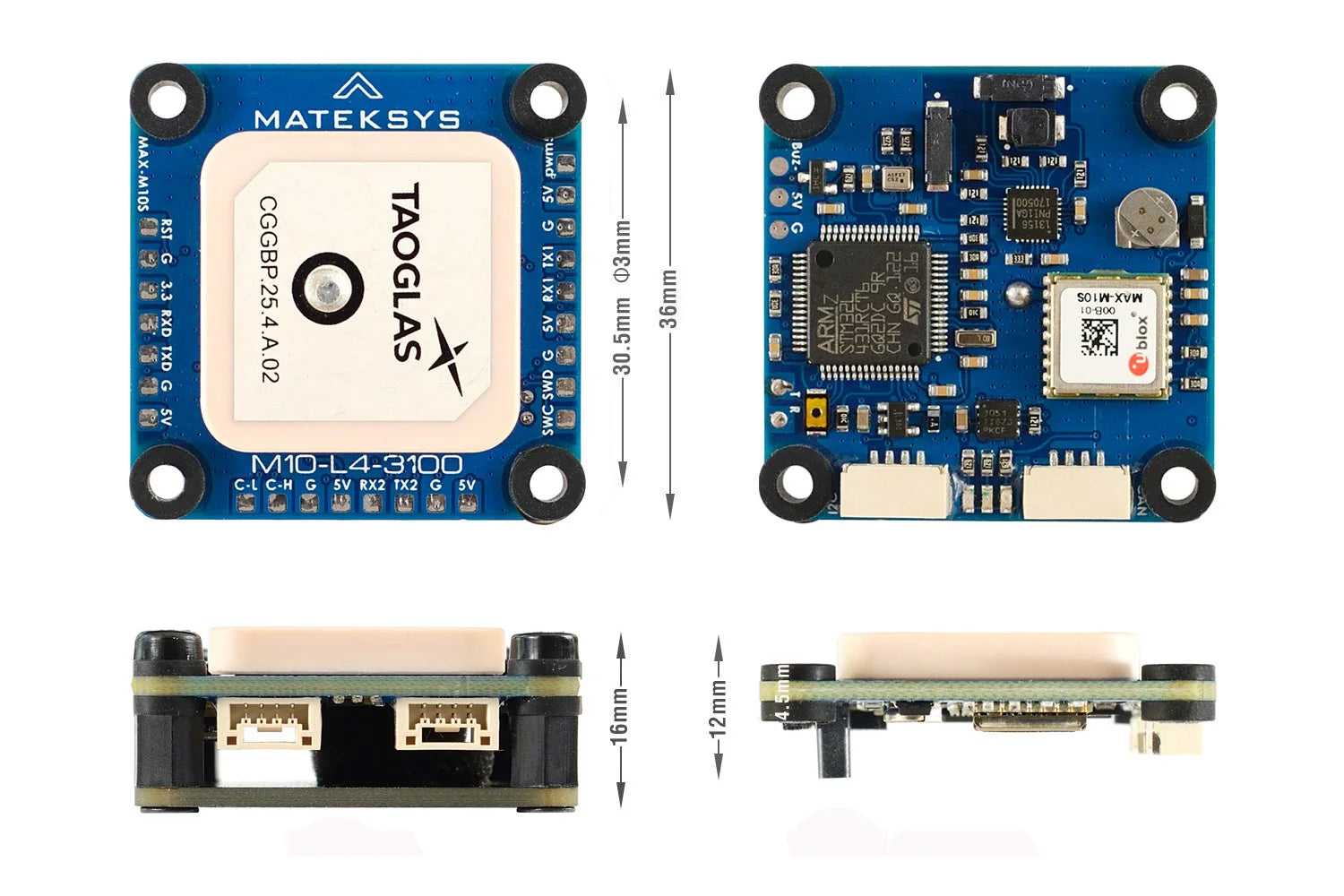
M10-L4-3100 is gebaseerd op de AP_Periph-firmware van ArudPilots. Het is een GNSS+COMPASS+BAROMETER-randapparaat met CAN/DroneCAN- en UART/MSP-interfaces.
-
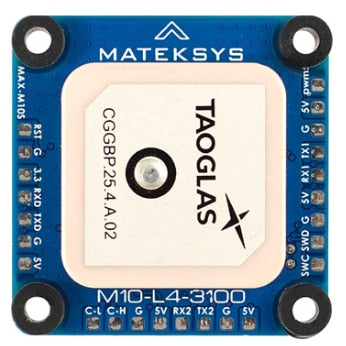
M10-L4-3100 maakt gebruik van GNSS met meerdere constellaties, aangedreven door u-blox MAX-M10S. MAX-M10S is een gelijktijdige GNSS-ontvanger die meerdere GNSS-systemen kan ontvangen en volgen. Dankzij de multi-band RF front-end architectuur kunnen alle vier de belangrijkste GNSS-constellaties, GPS, Galileo, GLONASS en BeiDou gelijktijdig worden ontvangen.
-
M10-L4-3100 integreert een industrieel kompas PNI RM3100 dat een hoge resolutie, laag stroomverbruik, geen hysterese, groot dynamisch bereik en hoge bemonsteringsfrequenties biedt.

de standaardconfiguratie op MAX-M1OS met ublox FWS . is gelijktijdige ontvangst van GPS, Galileo en BeiDou BI met QZSS en SBAS ingeschakeld. GLONASS is standaard uitgeschakeld Beidou B1I (1575,42 MHz) en kan niet tegelijkertijd worden ingeschakeld.
CAN (UAVCAN-protocol) Verbinding
-
M10-L4-3100 5V — FC 4,5V ~ 5.3V
-
M10-L4-3100 CAN-H — FC CAN Hoog
-
M10-L4-3100 CAN-L — FC CAN laag
-
M10-L4-3100 G — FC G/GND
FC UAVCAN-parameters (ArduPilot)
-
CAN_D1_PROTOCOL -> 1
-
CAN_P1_DRIVER -> 1
-
GPS_TYPE -> 9 (DroneCAN)
-
COMPASS_TYPEMASK -> 0 (zorg ervoor dat DroneCAN niet is aangevinkt)
—————————————————————————–
Als u de I2C-luchtsnelheidssensor aansluit op de I2C-poort van M10-L4-3100
-
ARSPD_TYPE -> 8 (UAVCAN)
-
ARSPD_USE -> 1
En u moet CAN-knooppuntparameters instellen voor de luchtsnelheidssensor aangesloten op de I2C-poort van M10-L4-3100
Missieplanner > Initiële installatie > Optionele hardware > UAVCAN > SLCan-modus CAN1 > Parameters
-
MS4525 ARSP_TYPE -> 1 (standaard in hwdef)
-
MS5525 ARSP_TYPE -> 3 ondersteunt alleen MS5525 met adres 0x77
-
SDP3X ARSP_TYPE -> 6
-
DLVR-L10D ARSP_TYPE -> 9
-
Schrijven en opnieuw opstarten
—————————————————————————–
Als u 2812LED DIN aansluit op PWM5-pad
-
NTF_LED_TYPES -> (zorg ervoor dat DroneCAN is aangevinkt)
SLCan-modus CAN1 > Parameters
-
OUT5_FUNCTION 120
-
NTF_LED_TYPES 455
-
AP_Periph fw moet 'MatekL431-Periph' zijn, De MSP-functie is uitgeschakeld in 'MatekL431-GPS'
UART (MSP-protocol) Verbinding
-
M10-L4-3100 5V — FC 4,0V ~ 5,3V
-
M10-L4-3100 TX2 — FC reserve UART_RX
-
M10-L4-3100 RX2 — FC reserve-UART_TX (niet essentieel)
-
M10-L4-3100 G — FC G/GND
ArduPilot (sinds 4.1.x) FC-parameters
-
Serialx_PROTOCOL = 32 (MSP) waarbij x de SERIËLE poort is die wordt gebruikt voor verbinding op de automatische piloot.
-
Serialx_BAUD = 115 waarbij x de SERIËLE poort is die wordt gebruikt voor verbinding op de automatische piloot.
-
GPS-TYPE = 19 (MSP)
-
BARO_PROBE_EXT = 4096 (MSP Baro)
-
BARO_PRIMARY = 1 (Als u de MSP-baro als primaire baro wilt gebruiken, laat deze anders op de standaardwaarde staan)
-
COMPASS_TYPEMASK 0 (of zorg ervoor dat de MSP-bit niet is aangevinkt)
INAV (sinds 2.6) FC-parameters
-
M10-L4-3100 is compatibel met elke vluchtcontroller die door INAV wordt ondersteund via een reserve UART.
-
Op het tabblad Poorten schakelt u MSP in op de overeenkomstige UART waarop de M10-L4-3100 is aangesloten. Schakel 'GPS' NIET in op die UART. selecteer Baudrate 115200.
-
functie GPS
-
stel gps_provider = MSP
in -
stel mag_hardware = MSP
in -
stel baro_hardware = MSP
in -
set align_mag = CW90, als het kompas plat is gemonteerd met de pijl naar voren gericht, en de pijl van de vluchtcontroller ook naar voren wijst.
Related Collections