Matek Systems GNSS M10Q-5883 U-Blox M10 GPS - met kompas QMC5883L-module Digitale luchtsnelheid 4 ~ 9V voor FPV Racing Drone
Matek Systems GNSS M10Q-5883 U-Blox M10 GPS - met kompas QMC5883L-module Digitale luchtsnelheid 4 ~ 9V voor FPV Racing Drone
MATEKSYS
Kan beschikbaarheid voor afhalen niet laden
Matek Systems GNSS M10Q-5883 U-Blox M10 GPS-SPECIFICATIES
Wielbasis: Bodemplaat
Gebruik: Voertuigen en speelgoed met afstandsbediening
Onderdelen/accessoires upgraden: GPS
Gereedschapsbenodigdheden: Montagecategorie
Technische parameters: KV1100
Grootte: zoals afgebeeld
Afstandsbediening Randapparatuur/Apparaten: Afstandsbediening
Aanbevolen leeftijd: 12+j
RC-onderdelen en -accessoires: M10Q-5883
Aantal: 1 stuks
Herkomst: Vasteland van China
Modelnummer: Matek GNSS M10Q-5883
Materiaal: Composietmateriaal
Kenmerken van vierwielaandrijving: Montage
Voor voertuigtype: Vliegtuigen
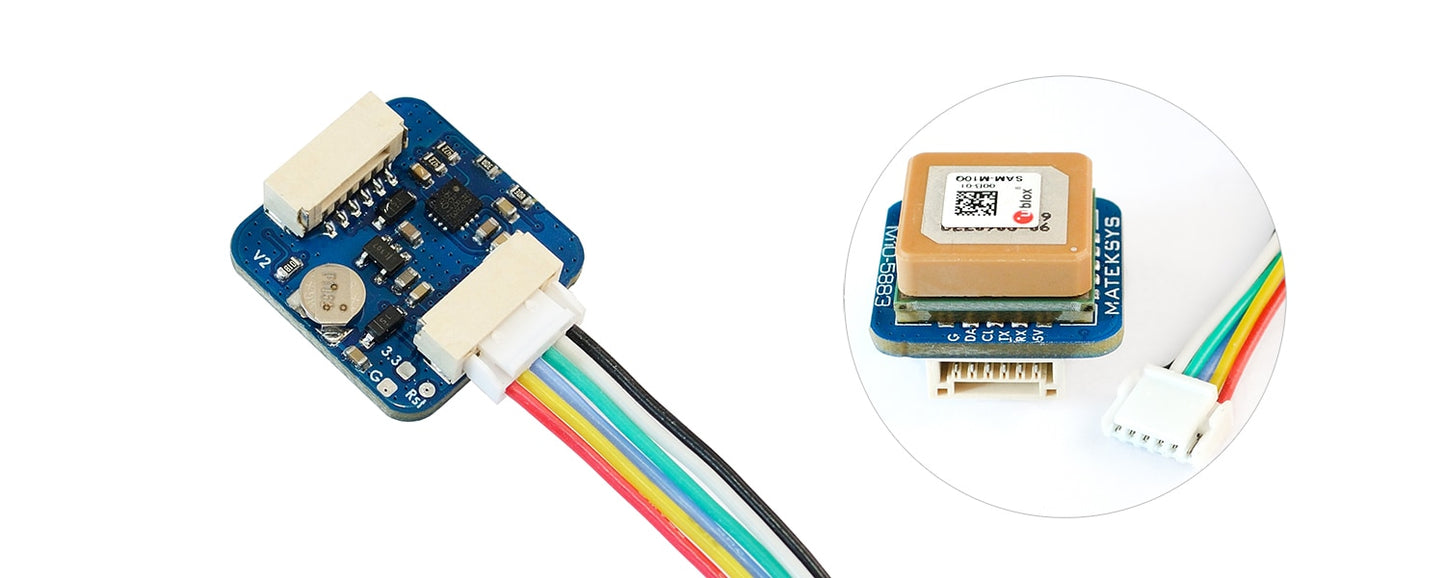
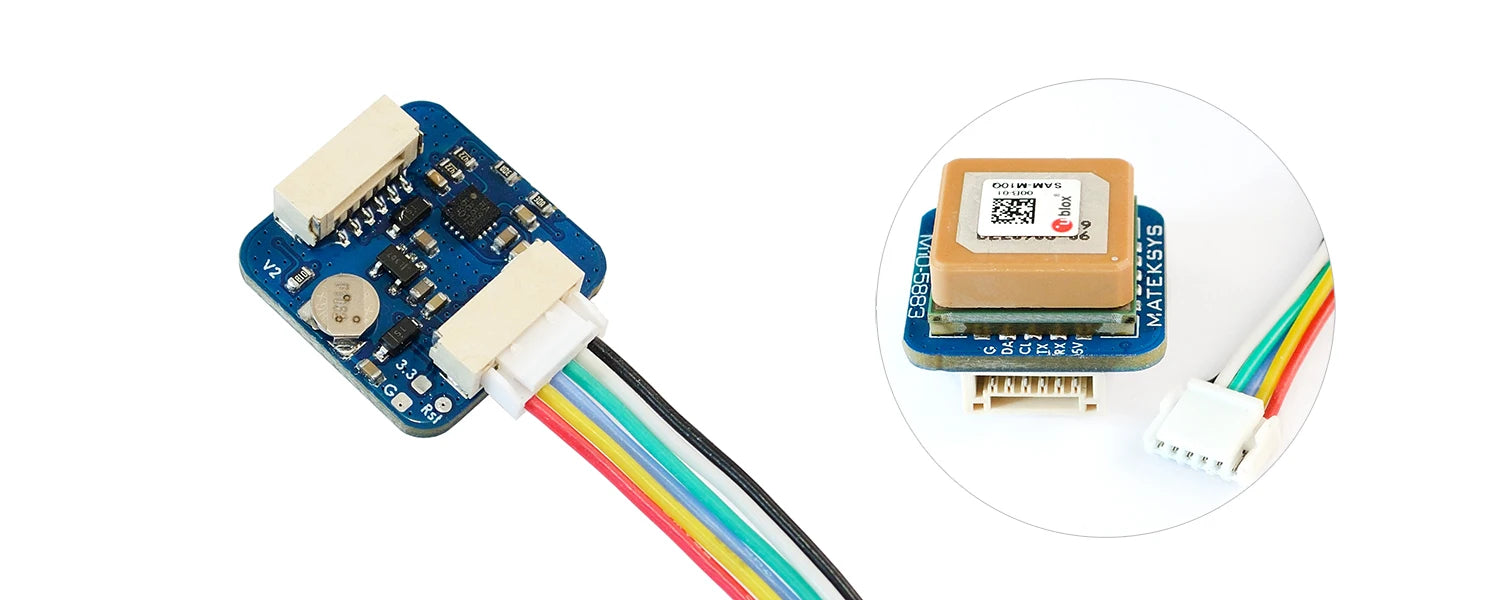
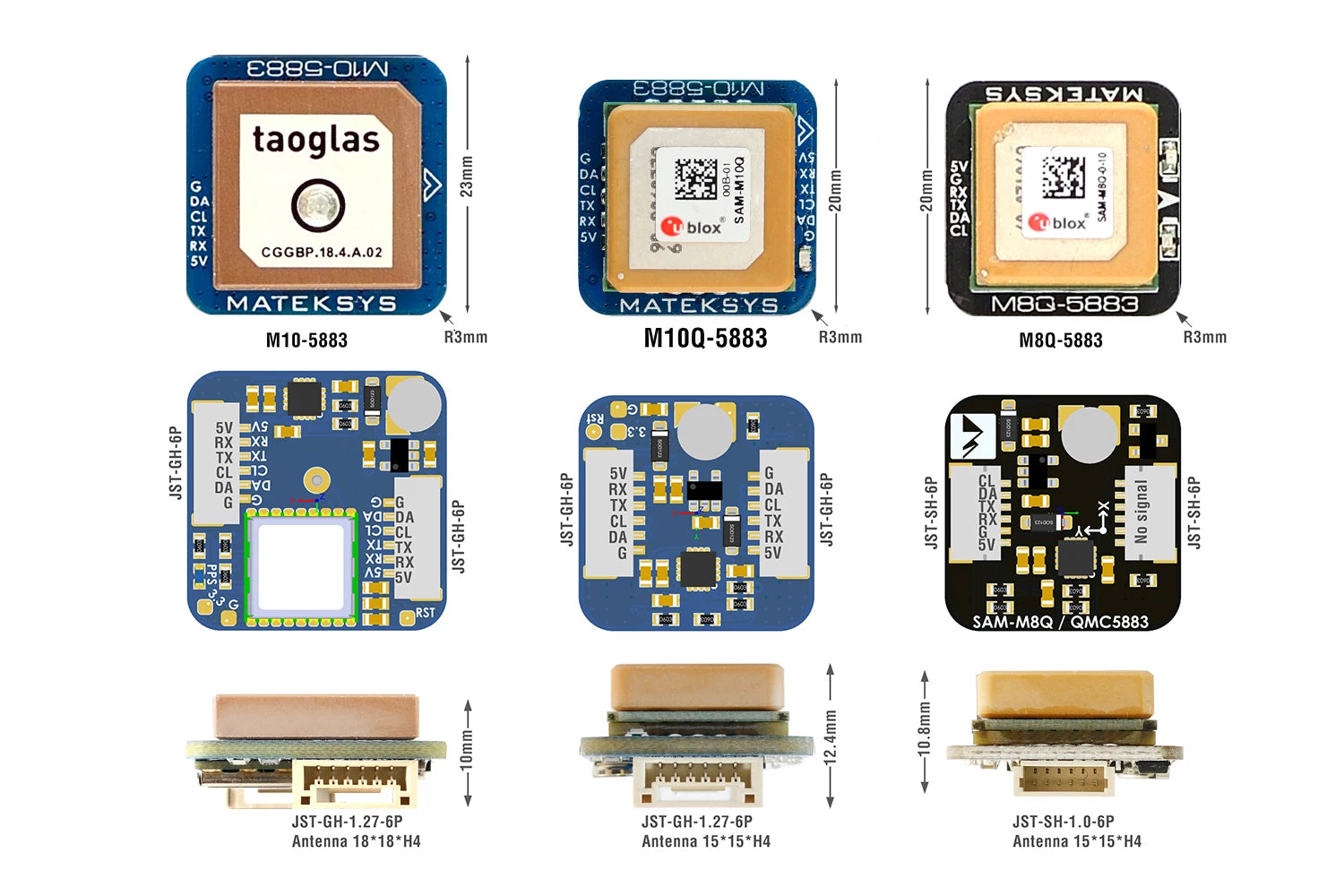
M10Q-5883 maakt gebruik van een GNSS-module met meerdere constellaties, aangedreven door u-blox SAM-M10Q-00B.
De SAM-M10Q is voorzien van het u-blox M10 standaard precisie GNSS-platform en biedt uitzonderlijke gevoeligheid en acquisitietijd voor alle L1 GNSS-signalen. SAM-M10Q ondersteunt gelijktijdige ontvangst van vier GNSS (GPS, GLONASS, Galileo en BeiDou). Door het grote aantal zichtbare satellieten kan de ontvanger de beste signalen selecteren. Dit maximaliseert de beschikbaarheid van posities, vooral onder uitdagende omstandigheden zoals in diepe stedelijke canyons. u-blox Super-S (Super-Signal)-technologie biedt een grote RF-gevoeligheid en kan de dynamische positienauwkeurigheid verbeteren in scenario's zonder zichtlijn.
De high-gain 15 x 15 mm2 patchantenne biedt de beste balans tussen prestatie en klein formaat. Het omnidirectionele antennestralingspatroon vergroot de flexibiliteit bij de installatie van apparaten.
Meer details over de SAM-M10Q vindt u op de u-blox SAM-M10Q-pagina
Specificaties
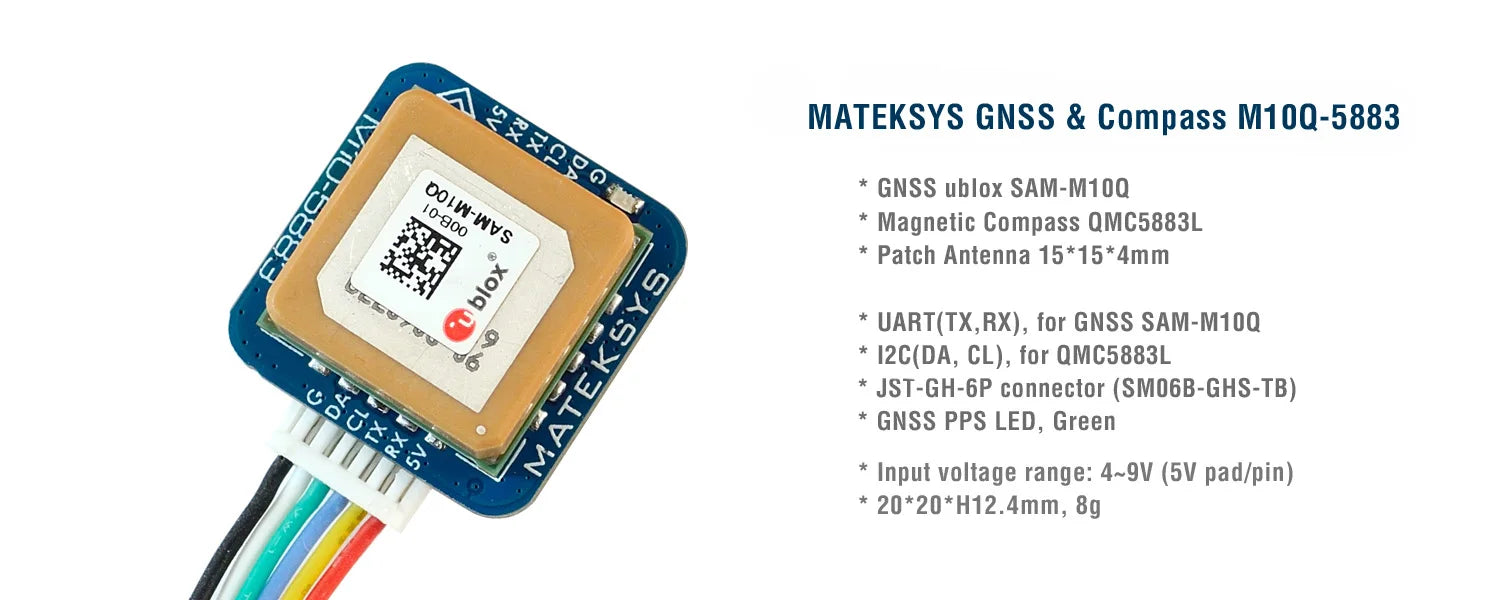
GNSS u-blox SAM-M10Q- 00B (GPS, GLONASS, Galileo en BeiDou)
Magnetisch kompas QMC5883L
Patchantenne 15*15*4mm
Ingangsspanningsbereik: 4~9V (5V pad/pin)
Stroomverbruik: 13mA
UART baudrate: 9600 standaard
Bedrijfstemperaturen: -20~80 °C
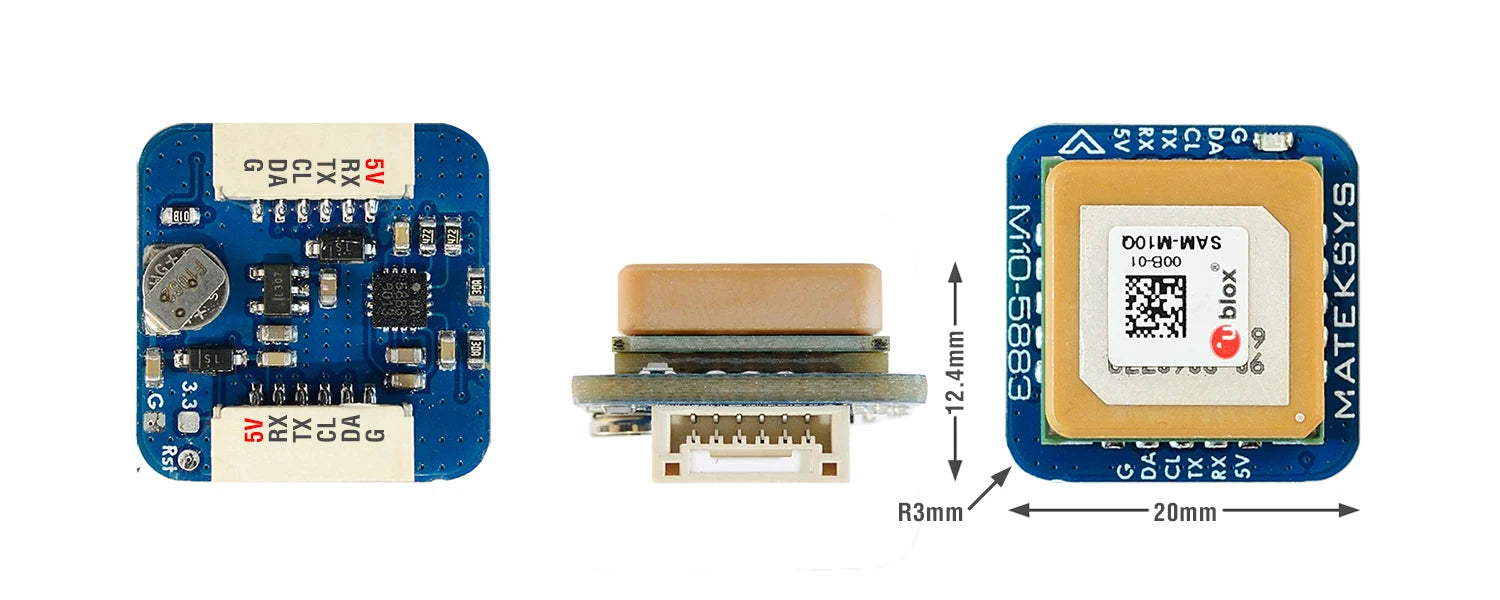
UART(TX, RX) interface voor GNSS SAM-M10Q-00B
I2C(DA, CL) interface voor kompas QMC5883L
JST-GH-6P-connector (SM06B-GHS-TB). 1,27 mm pitch
GNSS PPS-LED, groen. (Constant AAN na inschakelen, knipperend (1 Hz) wanneer GNSS 3D-fix ontvangt)
Protocol: UBX(u-blox) 5Hz@GPS+GAL+BDS B1C+GLO of NMEA 1Hz
20 mm*20 mm*12,4 mm
8g
M10Q-5883_step.zip
Inclusief
1x M10Q-5883
1x JST-GH-6P naar JST-GH-6P 20 cm siliciumdraad
Bedrading en instellingen
M10Q-5883 5V naar vluchtcontroller 4~9V
M10Q-5883 RX naar vluchtcontroller UART_TX
M10Q-5883 TX naar vluchtcontroller UART_RX
M10Q-5883 CL naar vluchtcontroller I2C_SCL
M10Q- 5883 DA naar vluchtcontroller I2C_SDA
M10Q-5883 G naar vluchtcontroller GND
Tips en opmerkingen
Kompasuitlijning (vlakke montage): Het kantelen van de magnetometer wordt sterk afgeraden !
INAV/BetaFLight: kompas Pijl vooruit, stel CW in op 270° Draai wanneer de pijl van de vluchtcontroller naar voren wijst.
INAV/BetaFLight: kompas Pijl achteruit, stel CW in op 90° Draai wanneer de pijl van de vluchtcontroller naar voren wijst.
Ardupilot/Mission Planner: Rotatie Geen.
Zorg ervoor dat u een kompas/magnetometer op 10 cm afstand van elektriciteitsleidingen/ESC/motoren/materiaal op ijzerbasis heeft
------–
INAV 5.0.0, Betaflight 4.3.0 , ArduPilot 4.3 of nieuwer is vereist.
UBlox NEO-M9N, MAX-M10S, SAM-M10Q-series hebben allemaal geen ingebouwde dataflash.zodra GNSS is uitgeschakeld en de supercondensator leeg is. de instellingen worden teruggezet naar de standaardwaarden.
Het UBX-protocol is bidirectioneel. Firmware van de vluchtcontroller kan de instellingen op GPS wijzigen via het UBX-protocol. U hoeft geen GNSS-moduleparameters in te stellen in u-center.
De standaardconfiguratie op SAM-M10Q met ublox FW 5.1 is gelijktijdige ontvangst van GPS, Galileo, GLONASS en BeiDou B1C met QZSS en SBAS ingeschakeld.
Begin met u-blox GNSS FW3.01, de tijdpuls wordt uitgelijnd met de UTC-tijd en die tijd wordt pas geldig ingesteld nadat de schrikkelseconde is gedownload. Dat kan tot 12,5 minuten duren. Waarschijnlijk zal de PPS-LED niet onmiddellijk knipperen nadat GPS 3D heeft hersteld.
De M10Q-5883 biedt de mogelijkheid om de ontvanger te resetten. Het overbruggen van de "RST"-pad naar aarde gedurende minimaal 100 ms zal een koude start veroorzaken. RESET verwijdert alle informatie en activeert een koude start. Het mag alleen worden gebruikt als hersteloptie. Als u zeker weet dat de bedrading en de installatie in orde zijn. maar de vluchtcontroller kan de GNSS-module niet detecteren (grijs GPS-pictogram), probeer een reset uit te voeren.
De krassen op de keramische antenne zijn het gevolg van het afstemmen van de antenne.
Los GPS-gerelateerde problemen op: http://www.mateksys.com/?p=5712#tab-id-6
u-center Windows
*** De SKU-zijdeprint op de eerste batch M10Q-5883 PCB's is "M10-5883".
Matek Systems GNSS-module (M10Q-5883 ) en kompasmodule (QMC5883L) met een magnetisch kompas en patchantenne, met een compact formaat van 15 mm x 15 mm x 4 mm en UART-interface voor verzending en ontvangst (TX/RX).
Related Collections