


MATEKSYS H7A3-SLIM Vluchtcontroller - ICM42688P - 30x30
MATEKSYS H7A3-SLIM Vluchtcontroller - ICM42688P - 30x30
MATEKSYS
Kan beschikbaarheid voor afhalen niet laden
De MATEKSYS H7A3-SLIM Flight Controller bied hoge prestaties in een compact ontwerp van 30x30mm. Het beschikt over de STM32H7A3RIT6 MCU, 280MHz Cortex-M7 processor, 1.4MB RAM en 2MB Flash. Met de ICM42688P IMU, SPL06-001 barometer, AT7456E OSD en 128MB Flash Blackbox, biedt het nauwkeurige gegevens en voldoende logging. De controller bevat 6 UARTs, 11 PWM-uitgangen, 1 I2C, 1 CAN-poort en 4 ADC-kanalen. Het heeft ook drie status-LED's, een USB Type-C poort en een schakelbare 9V-uitgang. Met een montagepatroon van 30,5 x 30,5mm, 4mm gaten, 3mm doorvoeren en een gewicht van slechts 7g, is het perfect voor FPV-racen en freestyle vliegen. Een 3D step-bestand is inbegrepen voor aangepaste integratie.
Kenmerken
- On-Screen Display
- 30x30 Bevestiging
- Compact Ontwerp
- Connectiviteit
- Lichtgewicht
Specificaties
Specificaties
- MCU: STM32H7A3RIT6, 280MHz Cortex-M7, 1.4MB RAM, 2MB Flash
- IMU: ICM42688P
- Baro: SPL06-001
- OSD: AT7456E
- Blackbox: 128MB Flash (1G-bit NAND)
- 6x Uarts (1,2,3,4, 5, 6) met ingebouwde inversie.
- 11x PWM-uitgangen
- 1x I2C
- 1x CAN
- 4x ADC (VBAT, Stroom, VB2, Cur2)
- 3x LEDs voor FC STATUS (Blauw, Rood) en 3.3V indicator(Rood)
- USB Type-C(USB2.0)
- 8x PWM-uitgangen op 2x JST-SH1.0_8pin connector voor 2x 4in1 ESC
- 1x JST-GH1.25_4pin connector (5V/CAN-H/CAN-L/G)
- 9V-uitgang AAN/UIT schakelbaar
- Digitale video OSD wordt ondersteund door elke vrije UART
Voeding
- Vbat Ingang: 6~36V (2~8S LiPo)
- BEC: 5V 2A continu (Max.3A)
- BEC: 9V 2A continu (Max.3A)
- LDO 3.3V: Max.200mA
- Geen stroomsensor ingebouwd
- ADC VB2 pad ondersteunt Max. 69V (spanningsdeler: 1K:20K)
FC Firmware
- ArduPilot: MATEKH7A3 (4.6 of nieuwer)
- ArduPlane https://firmware.ardupilot.org/Plane/beta/MatekH7A3/
- ArduCopter &https://firmware.ardupilot.org/Copter/beta/MatekH7A3/
- Flitsen met STM32CubeProgrammer
Fysiek
- Montage: 30,5 x 30,5 mm, Φ4 mm met O-ringen Φ3 mm
- Afmetingen: 36 x 36 x 5 mm
- Gewicht: 7g
- 3D stap H7A3-SLIM_step.zip
Inclusief
- 1x H7A3-SLIM
- 6x Siliconen O-ringen M4 naar M3
- 2x JST-SH1.0_8pin kabel, 5cm, & 8pin connectors
- 1x JST-GH-4P naar JST-GH-4P kabel voor CAN-poort, 20cm
Details

MATEKSYS H7A3-SLIM vluchtcontroller gebruikt een STM32H7A3 MCU met ICM42688P IMU en een USB-C poort in een 30,5 mm montagepatroon.

De MATEKSYS H7A3-SLIM vluchtcontroller gebruikt een compact 30x30 ontwerp met een USB-C poort en duidelijk gelabelde pads voor nette bedrading.

MATEKSYS H7A3-SLIM gebruikt dubbele JST-SH 1.0 8-pins connectors plus een JST-GH 4-pins poort en USB Type-C voor nette bedrading en eenvoudige installatie.

MATEKSYS H7A3-SLIM gebruikt duidelijk gelabelde soldeerpads en poorten voor camera/VTx video, UARTs, CAN en stroomverbindingen.
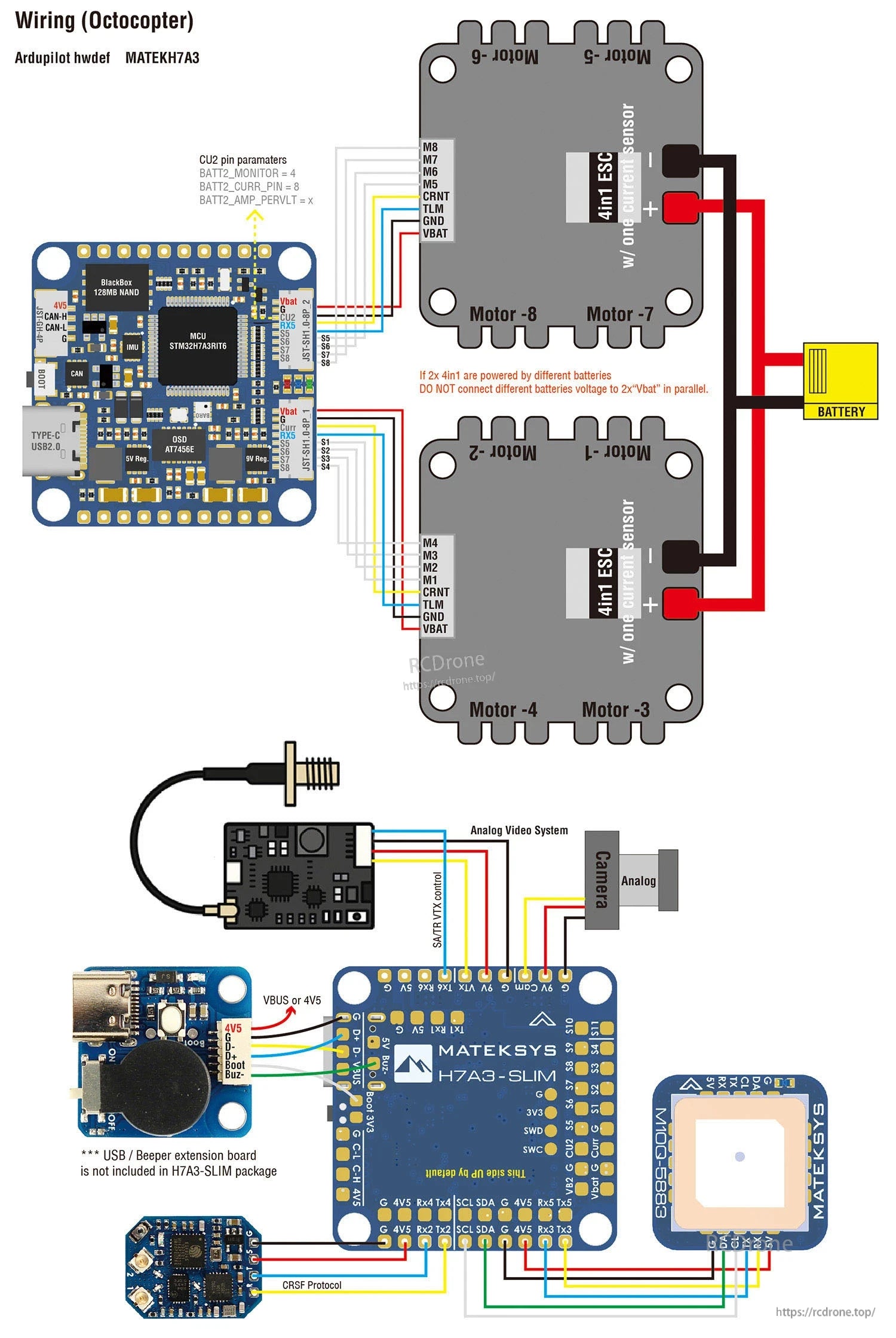
MATEKSYS H7A3-SLIM maakt gebruik van duidelijk gelabelde pads voor het aansluiten van dual 4-in-1 ESC's, VBAT-voeding, GPS, ontvanger en analoge videocomponenten.

ArduPilot mapping
| ArduPilot | ||||||
| PWM | S1 | PWM1 GPIO50 | 5 V tolerant I/O | TIM1_CH2 | DMA/Bi-DShot | Groep1 |
| S2 | PWM2 GPIO51 | 5 V tolerant I/O | TIM1_CH3 | DMA/Bi-DShot | ||
| S3 | PWM3 GPIO52 | 5 V tolerant I/O | TIM2_CH1 | DMA/Bi-DShot | Groep2 | |
| S4 | PWM4 GPIO53 | 5 V tolerant I/O | TIM2_CH2 | DMA/Bi-DShot | ||
| S5 | PWM5 GPIO54 | 5 V tolerant I/O | TIM3_CH3 | DMA/Bi-DShot | Groep3 | |
| S6 | PWM6 GPIO55 | 5 V tolerant I/O | TIM3_CH4 | DMA/Bi-DShot | ||
| S7 | PWM7 GPIO56 | 5 V tolerant I/O | TIM3_CH1 | DMA/Bi-DShot | ||
| S8 | PWM8 GPIO57 | 5 V tolerant I/O | TIM3_CH2 | DMA/Bi-DShot | ||
| S9 | PWM9 GPIO58 | 5 V tolerant I/O | TIM4_CH1 | DMA/DShot | Groep4 | |
| S10 | PWM10 GPIO59 | 5 V tolerant I/O | TIM4_CH2 | DMA/DShot | ||
| S11 | PWM11 GPIO60 | 5 V tolerant I/O | TIM16_CH1 | DMA/DShot | Groep5 | |
| PWM1~PWM11 zijn Dshot en PWM-capabel.Echter, het mengen van Dshot en normale PWM-operatie voor uitgangen is beperkt tot groepen, dat wil zeggen. het inschakelen van Dshot voor een uitgang in een groep vereist dat ALLE uitgangen in die groep zijn geconfigureerd en gebruikt als Dshot, in plaats van PWM-uitgangen. Als servo en motor in dezelfde groep zijn gemengd, zorg er dan voor dat deze groep de laagste PWM-frequentie draait volgens de specificatie van de servo. Dat wil zeggen. Als de servo Max. 50Hz ondersteunt, moet de ESC in deze groep op 50Hz draaien. |
||||||
| PINIO | 9V-schakelaar | GPIO81 | RELAY1_PIN | 81 | ||
| ADC | Vbat pad | BATT_VOLTAGE_SENS | 6~36V | BATT_VOLT_PIN BATT_VOLT_MULT |
10 21.0 |
|
| Curr pad | BATT_CURRENT_SENS | 0~3.3V | BATT_CURR_PIN BATT_AMP_PERVLT |
11 X |
||
| VB2 Pad | BATT2_VOLTAGE_SENS | 0~69V | BATT2_VOLT_PIN BATT2_VOLT_MULT |
18 21.0 |
||
| CU2 Pad | BATT2_CURRENT_SENS | 0~3.3V | BATT2_CURR_PIN BATT2_AMP_PERVLT |
8 X |
||
| I2C | SCL/SDA | I2C3 | 5V tolerant I/O | op het bord Baro SPL06-001 | Adres | 0x76 |
| Digitale luchtsnelheid I2C MS4525 DLVR-L10D |
ARSPD_BUS ARSPD_TYPE ARSPD_TYPE |
0 1 9 |
||||
| Magnetometer | COMPASS_AUTODEC | 1 | ||||
| CAN | C-H/C-L | CAN2 | 5V tolerant I/O | CAN | CAN_D1_PROTOCOL CAN_P1_DRIVER |
1 1 |
| KAN GPS KAN Kompas KAN Luchtsnelheidssensor |
GPS_TYPE COMPASS_TYPEMASK ARSPD_TYPE |
9 0 8 |
||||
| UART | USB | USB | console | SERIAL0_PROTOCOL | 2 | |
| TX1 RX1 | USART1 w/DMA | 5 V tolerant I/O | Telemetry | SERIAL1_PROTOCOL | 2 | |
| TX2 RX2 | USART2 w/DMA | 5 V tolerant I/O | RC invoer/ontvanger | SERIAL2_PROTOCOL | 23 | |
| TX3 RX3 | USART3 w/DMA | 5 V tolerant I/O | GPS | SERIE3_PROTOCOL | 5 | |
| TX4 RX4 | UART4 zonder DMA | 5 V tolerant I/O | Reserve | SERIE4_PROTOCOL | -1 | |
| TX5 RX5 | UART5 zonder DMA | 5 V tolerant I/O | Reserve | SERIE5_PROTOCOL | -1 | |
| TX6 RX6 | USART6 zonder DMA | 5 V tolerant I/O | Reserve | SERIE6_PROTOCOL | -1 | |
RC INVOER
RC invoer is geconfigureerd op de USART2(SERIE2).Het ondersteunt alle seriële RC-protocollen. SERIAL2_PROTOCOL=23 standaard.
- PPM wordt niet ondersteund.
- CRSF vereist een Tx2 & Rx2-verbinding, en stel SERIAL2_OPTIONS in op “0” (standaard).
- SBUS/DSM/SRXL wordt aangesloten op de Rx2-pin, maar SBUS vereist dat de SERIAL2_OPTIONS zijn ingesteld op “3”.
- FPort vereist verbinding met Tx2, en stel SERIAL2_OPTIONS in op “7”. Als Telemetrie niet werkt, probeer dan set SERIAL7_OPTIONS = 135.
- SRXL2 vereist een verbinding met Tx2 en biedt automatisch telemetrie. Stel SERIAL2_OPTIONS in op “4”.
- Elke UART kan ook worden gebruikt voor RC-systeemverbindingen in ArduPilot en is compatibel met alle protocollen behalve PPM. Zie Radio Control Systems voor details.
ArduPilot Relay(PINIO)
- 9V-uitgang standaard AAN
- PC13 PINIO1 UITGANG GPIO(81) //9V voeding switche.g.
- RELAY1_FUNCTIE 1
- RELAY1_PIN 81 // PINIO1 GPIO
- RC7_OPTIE 28 //Relay Aan/Uit, Gebruik CH7 van de zender om 9V AAN/UIT te zetten
De geconfigureerde functie wordt geactiveerd wanneer de pwm-waarde van de hulpschakelaar hoger wordt dan 1800. Het wordt gedeactiveerd wanneer de waarde onder de 1200 valt.
Controleer de pwm-waarde die door de zender wordt verzonden wanneer de schakelaar hoog en laag is met behulp van het Initial Setup >> Verplichte Hardware >> Radio Calibratie scherm.Als het niet hoger dan 1800 of lager dan 1200 klimt, is het het beste om de servo-eindpunten in de zender aan te passen.
Related Collections


