







Mayatech 1258TG V3 20KG servo - waterdichte metalen tandactuator met hoog koppel Digitale stuurservo kan naar parabolische 1268SG
Mayatech 1258TG V3 20KG servo - waterdichte metalen tandactuator met hoog koppel Digitale stuurservo kan naar parabolische 1268SG
Mayatech
Kan beschikbaarheid voor afhalen niet laden
Mayatech 1258TG V3 ServoSPECIFICATIES
Merknaam: Mayatech
Herkomst: Vasteland van China
Materiaal: Composietmateriaal
Aanbevolen leeftijd: 12+j
RC-onderdelen en -accessoires: Servo's
Voor voertuigtype: Vliegtuigen
Gebruik: Voertuigen en speelgoed met afstandsbediening
Afstandsbediening Randapparatuur/Apparaten: Servo's
Gereedschapsbenodigdheden: Gereedschap
Aantal: 1 stuks
Modelnummer: 1258TG 1268SG

Mayatech 1258TG V3 waterdichte servo: Upgrade van V2 naar V3, met verbeterde hardware en een rubberen afstandsstuk voor verhoogde waterbestendigheid. Door voortdurende updates en testen is deze servo versterkt met betere materialen en verbeterde oppervlaktetoepassing.

Mayatech 1258TG V3 digitale servo, waterdicht en metalen tandactuator met hoog koppel, compatibel met parabolisch stuurservomodel 1268SG.

Mayatech 1258TG V3 servo, waterdicht, metalen tandactuator met hoog koppel, digitale stuurinrichting voor parabolische bewegingsbediening, compatibel met Mayatech's 1268SG.
Metalen tanden met groot koppel
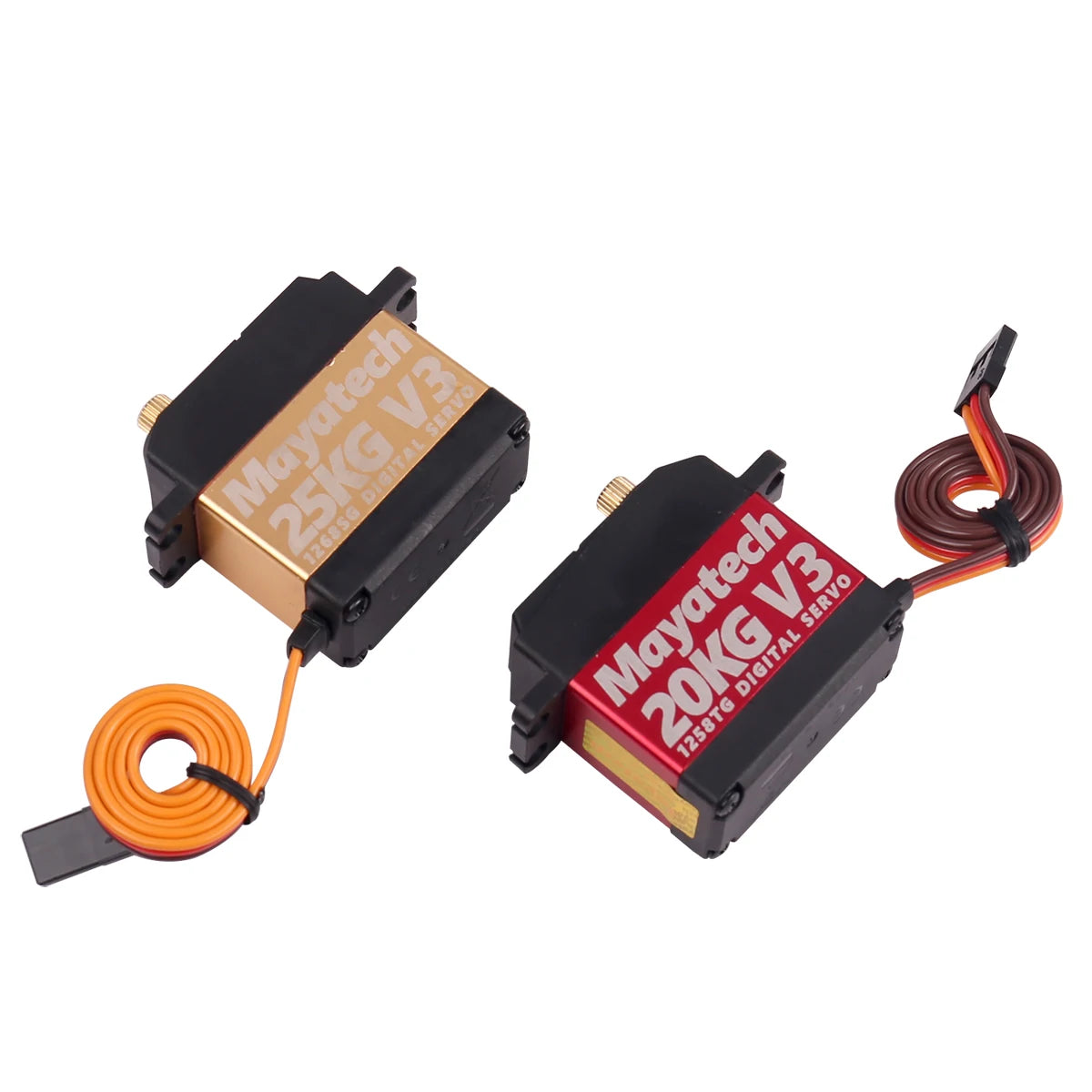
Mayatech 1258TG V3-servo
20kg / 25kg groot koppel, volledig metalen koperen tanden, dubbele lagers, hoge precisie, laag geluidsniveau, grote hoek, stabiele prestaties

Mayatech's V3-servo heeft een digitale stuurinrichting en een waterdicht ontwerp, met een metalen tandactuator met hoog koppel, geschikt voor parabolische systemen.
Geïmporteerde chip
Snelle respons, geen roerbewegingen, snelle output, digitale modus, hoge boorsnelheid, veilig en stabiel, zodat je je stunts vrij kunt spelen

Mayatech 1258TG V3 digitale servo, waterdichte, metalen tandactuator met hoog koppel, geschikt voor parabolische systemen en compatibel met Mayatech's 1268SG stuurinrichting.
IP86 waterdicht
Alle gaten zijn voorzien van waterdichte pakkingen, zodat je zonder zorgen kunt waden (het kan spatten voorkomen en kan niet langdurig in water worden ondergedompeld)

De waterdichte servo van Mayatech is voorzien van drie rubberen afdichtingsringen, getest volgens IP86-normen, waardoor betrouwbare prestaties worden gegarandeerd, zelfs in natte omstandigheden.
Metalen middenschaal
Middenschaal van CNC-aluminiumlegering, hoge sterkte, corrosieweerstand en duurzaamheid

Mayatech 1258TG V3 waterdichte digitale stuurservo met hoog koppel en metalen tandactuator, compatibel met parabolische 1268SG.
Siliconen stuurhuisleiding
JR-stekker, sterk aanpassingsvermogen, corrosiebestendige siliconendraad, draadlengte 265 mm

Accessoires: roerarm compleet
Inclusief stuurhuistoebehorenpakket, recht, half, kruis, *type, schijf en bijbehorende schroeven

Maatintroductie

Mayatech's 1258TG V3-servo heeft een waterdicht ontwerp, een metalen tandactuator met hoog koppel en een digitale stuurinrichting voor gebruik met parabolische systemen zoals de 1268SG.

Mayatech's 1258TG V3-servo heeft een waterdicht ontwerp, een actuator van 20 kg met metalen tanden en een hoog koppel. Met een gewicht van 68 gram en 2BB lagers is deze digitale stuurservo geschikt voor parabolische systemen zoals de 1268SG.
Hoekbereik: werkelijke hoek 120 ± 2 °, ongeveer 60 graden
Versnelling: titanium stalen tanden
Snelheid (4,8V): 0,13 sec / 60 °
Snelheid (6V): 0,11 sec / 60 °
Koppel (4,8 V): 17,25 kg cm (239,55 oz/in)
Koppel (6V): 20,32 kg cm (281,89 oz / in)
Afmetingen: 40,5x20,2x38mm / (standaardformaat)
Gewicht: 65 g (2,18 oz)
Aansluitdraad: JR-stekker (Futaba universeel) 265 mm (10,43 in)
Lager: 2BB tandverbindingsdeel is voorzien van lager en de bediening is soepel zonder vastlopen
Uitgaande tand: 25T (Futaba algemeen)
Inclusief stuurhuistoebehorenpakket, recht, half, kruis, *type, schijf en bijbehorende schroeven
Totaal gewicht van metalen pakket: 139 g
Opmerking:pulsbreedtebereik: 500 μs-2500 μS (geschikt voor bediening op afstand en microcontroller) dode zone: 2 μs

Mayatech's 1268SG V3-servo heeft een waterdicht ontwerp, een actuator met metalen tanden met hoog koppel en een digitale stuurinrichting. Het heeft een gewicht van 68 gram, een torsie van 25 kg en een lager van 2BB. Het aantal uitgaande tanden is 25T (Futaba-valuta) met een pulsbereik van 500-2500us.
Hoekbereik: werkelijke hoek 120 ± 2 °, ongeveer 60 graden
Tandwiel: metalen koperen tanden
Snelheid (4,8 V): 0,13 sec / 60 °
Snelheid (6V): 0,11 sec / 60 °
Koppel (4,8 V): 19,9 kg cm (239,55 oz/in)
Koppel (6V): 25,32 kg cm (281,89 oz / in)
Afmetingen: 40,5x20,2x38mm / (standaardformaat)
Gewicht: 68 g (2,18 oz)
Aansluitdraad: JR-stekker (Futaba universeel) 265 mm (10.43 inch)
Lager: 2BB tandverbindingsdeel is voorzien van lager en de bediening is soepel zonder vastlopen
Uitgaande tand: 25t (Futaba algemeen)
Inclusief stuurhuistoebehorenpakket, recht, half, kruis, *type, schijf en bijbehorende schroeven
Totaal gewicht van metalen pakket: 139 g
Opmerking:pulsbreedtebereik: 500 μs-2500 μS (geschikt voor bediening op afstand en microcontroller) dode zone: 2 μs
Productweergave:

Mayatech 1258TG V3 digitale servo is voorzien van waterdichte metalen tandactuator met hoog koppel, compatibel met parabolische tandwielsystemen.

Mayatech's 1258TG V3 digitale stuurservo heeft een hoog koppel en een waterdicht ontwerp, waardoor hij geschikt is voor diverse toepassingen, waaronder parabolische systemen. De servo heeft een actuator met metalen tanden en kan worden gebruikt als vervanging of upgrade voor het 1268SG-model.



MayaTech 1258TG V3 digitale servo heeft een waterdicht ontwerp, een metalen tandactuator met hoog koppel en een digitale stuurinrichting voor nauwkeurige controle. Compatibel met parabolische systemen zoals de 1268SG.

Mayatech's waterdichte digitale servo, model 1258TG-V3, beschikt over een metalen tandactuator met hoog koppel en een digitale stuurinrichting, geschikt voor parabolische toepassingen.

Verpakking met metalen behuizing:

Mayatech's 20KG V3 1258TG digitale servo is voorzien van waterdichte metalen tandactuator met hoog koppel, ideaal voor parabolische toepassingen.

Mayatech 1258TG V3 20KG servo - Waterdichte metalen tandactuator met hoog koppel, digitale stuurservo voor parabolische toepassingen.

Mayatech's 20KG VB digitale servo met hoog koppel en waterdicht ontwerp, geschikt voor parabolische systemen.

Mayatech's 1258TG V3-servo is een waterdichte digitale stuurinrichting met hoog koppel, voorzien van een actuator met metalen tanden voor nauwkeurige bediening. Compatibel met het parabolische systeem 1268SG.

Mayatech 1258TG V3 waterdichte digitale servo voor stuurinrichting, actuator met metalen tanden met hoog koppel, compatibel met Mayatech 1268SG en andere modellen.
Hoge reactiesnelheid en groot koppel, kan worden toegepast op helikopters, vaste vleugels, voertuig- en scheepsmodellen en robots. Het is een allround stuurhuis, alom aanbevolen door modelvrienden!

Universeel geschikt voor modelauto's, klimauto's, vrachtwagens en meer.

Digitale stuurservo met hoog koppel en waterdichte metalen tandactuator, geschikt voor elektrische helikopters, modelvliegtuigen en schepen, met robuust ontwerp en betrouwbare prestaties.
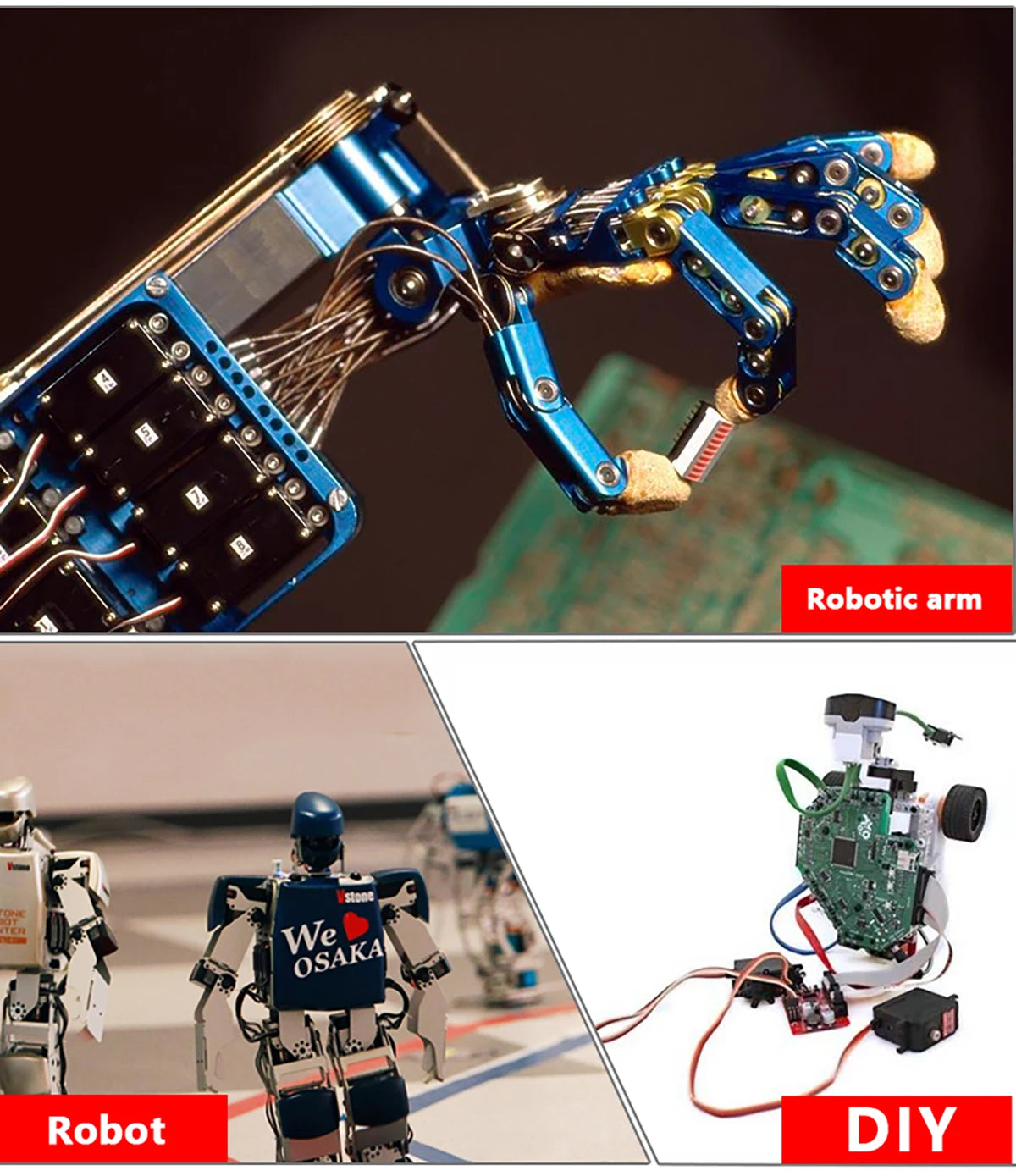
Mayatech's 1258TG V3-servo heeft een waterdicht ontwerp, een metalen tandactuator met hoog koppel en een digitale stuurinrichting voor nauwkeurige robotarmbediening.

Verschil tussen digitale (digitale) stuurinrichting en analoge stuurinrichting
Digitale servo en analoge servo zijn identiek in mechanische basisstructuur, voornamelijk samengesteld uit motor, reductiekast en stuurcircuit. Het grootste verschil tussen digitale servo en analoge servo wordt weerspiegeld in het stuurcircuit. Het stuurcircuit van de digitale servo is meer een microprocessor en een kristaloscillator dan dat van een analoge servo.Onderschat deze verandering niet, deze heeft een beslissende invloed op het verbeteren van de prestaties van de stuurinrichting.
Digitale stuurinrichting verschilt op de volgende twee punten van analoge stuurinrichting:
De methode voor het verwerken van het ingangssignaal van de ontvanger;
De manier waarop de initiële stroom van de motor van het stuurhuis wordt geregeld, verkleint het niet-reactiegebied (het controlegebied dat niet reageert op een klein aantal signalen), verhoogt de resolutie en genereert een grotere vaste kracht.
Wanneer de gesimuleerde stuurinrichting onbelast is, wordt er geen vermogen overgebracht naar de stuurinrichtingmotor. Wanneer er een signaalingang is om het stuurhuis te bewegen, of wanneer de tuimelaar van het stuurhuis een externe kracht ontvangt, zal het stuurhuis reageren en vermogen (spanning) overbrengen naar de stuurhuismotor. Dit vermogen wordt feitelijk 50 keer per seconde verzonden, gemoduleerd tot de maximale spanning van de aan/uit-puls, en genereert kleine segmenten van vermogen. Wanneer de breedte van elke puls bijvoorbeeld wordt vergroot, zal de efficiëntie van de elektronische transmissie verschijnen totdat het maximale vermogen / de maximale spanning naar de motor wordt overgedragen en de motor draait om de tuimelaar van het stuurhuis naar een nieuwe positie te richten. Wanneer de potentiometer van het stuurhuis vervolgens aan het elektronische onderdeel vertelt dat het de gespecificeerde positie heeft bereikt, zal de vermogenspuls de pulsbreedte verkleinen en de motor vertragen. Zolang er geen stroomtoevoer is, stopt de motor volledig.
Het "nadeel" van het simuleren van de stuurinrichting is dat er, uitgaande van een korte krachtpuls gevolgd door een lange pauze, niet veel bekrachtiging op de motor kan worden uitgeoefend om deze te laten draaien. Dit betekent dat bij een kleine besturingsactie de stuurinrichting een kleine initiële puls naar de motor stuurt, wat zeer inefficiënt is. Dit is ook de reden waarom er een "geen reactiezone" is in de gesimuleerde stuurinrichting. De stuurinrichting reageert bijvoorbeeld erg traag op de kleine bewegingen van de zender, of er komt helemaal geen reactie.
Vergeleken met de traditionele analoge stuurinrichting heeft de digitale stuurinrichting twee voordelen:
Dankzij de microprocessor kan de digitale stuurinrichting het ingangssignaal volgens de ingestelde parameters verwerken voordat de vermogenspuls naar de stuurinrichtingmotor wordt gestuurd. Dit betekent dat de breedte van de vermogenspuls, dat wil zeggen het vermogen van de bekrachtigingsmotor, kan worden aangepast volgens de programmaberekening van de microprocessor om zich aan te passen aan verschillende functionele eisen en de prestaties van de stuurinrichting te optimaliseren.
De digitale servo stuurt krachtpulsen naar de motor met een veel hogere frequentie. Dat wil zeggen, vergeleken met de traditionele 50 pulsen/seconde is het nu 300 pulsen/seconde. Hoewel de breedte van elke vermogenspuls vanwege de hoge frequentie wordt verkleind, ontvangt de motor tegelijkertijd meer bekrachtigingssignalen en draait hij sneller. Dit betekent ook dat niet alleen de servomotor op een hogere frequentie reageert op het signaal van de zender, maar dat ook de "no response zone" kleiner wordt; De reactie wordt sneller; Snellere en zachtere acceleratie en vertraging; Digitale stuurinrichting zorgt voor een hogere nauwkeurigheid en betere vaste kracht.
Related Collections










