






MyActuator RMD-X4-10 Planetaire Actuator 10N·m Dubbele Encoder EtherCAT+CAN Robot Aandrijving
MyActuator RMD-X4-10 Planetaire Actuator 10N·m Dubbele Encoder EtherCAT+CAN Robot Aandrijving
MyActuator
Kan beschikbaarheid voor afhalen niet laden
Overzicht
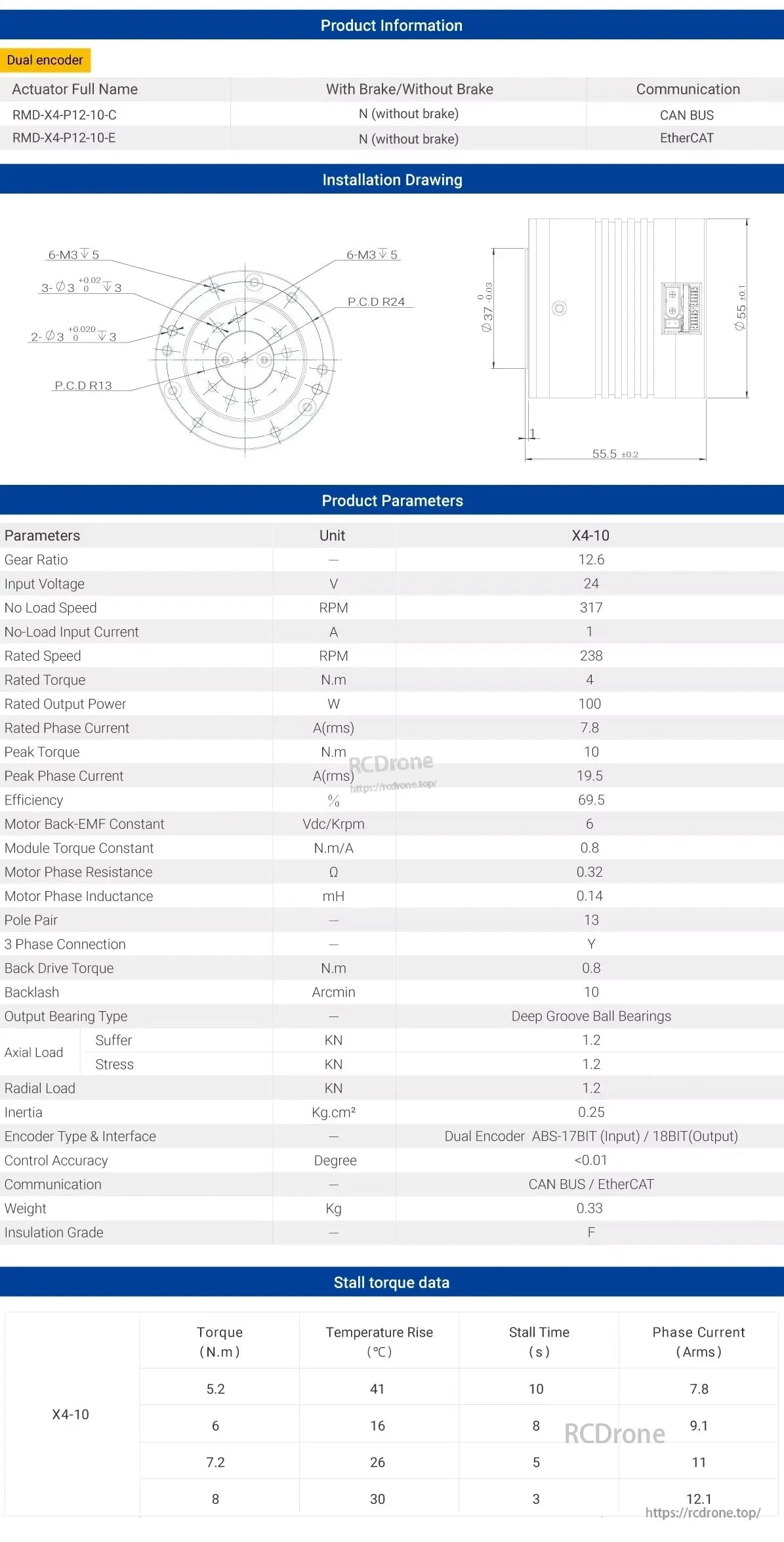
De MyActuator RMD-X4-10 planetaire actuator is een hoogpresterende DC-motor joint module, ontworpen voor geavanceerde robottoepassingen. Met een 12,6:1 planetaire overbrengingsverhouding, 10N·m piek koppel, en 100W nominale uitgangsvermogen, integreert het een dual encoder systeem (17-bits invoer / 18-bits uitvoer) dat 0,01° precisiecontrole biedt. De grote holle structuur ondersteunt multi-sensor integratie, waardoor een centraal knooppunt voor volledige lichaamspositiecontrole in humanoïde robots mogelijk is. Met EtherCAT en CAN dual-protocol communicatie bereikt de actuator 250μs ultra-snelle respons, waardoor het ideaal is voor hoog-dynamische, hoogbetrouwbare scenario's zoals humanoïde robots, bionische beenaandrijvingen en industriële automatisering.
Belangrijkste Kenmerken
-
Hoge Precisie Dual Encoder: 17-bits invoer / 18-bits uitvoer met 0.01° nauwkeurigheid
-
Piek Koppel 10N·m met 12.6:1 planetaire overbrengingsverhouding
-
Kruisrollager: Uitzonderlijke anti-buigmomentcapaciteit voor stabiele robotgewrichten
-
EtherCAT + CAN Bus Dubbele Communicatie: Ondersteunt multi-machine koppeling, ultra-snelle 250μs respons
-
Grote Holle Structuur: Maakt integratie van sensoren, kabels en slipringen mogelijk voor complexe robotsystemen
-
Hoge Betrouwbaarheid: Ontworpen voor humanoïde loopcontrole, soepele overgangen voor rennen, springen en complexe bewegingen
-
Compact & Lichtgewicht: Φ55mm × 55.5mm, gewicht 0.33kg
Specificaties
| Parameter | Waarde |
|---|---|
| Model | RMD-X4-10 |
| Overbrengingsverhouding | 12.6:1 |
| Ingangsspanning | 24V DC |
| Nominale snelheid | 238 RPM |
| Onbelaste snelheid | 317 RPM |
| Nominaal uitgangsvermogen | 100W |
| Nominaal koppel | 4N·m |
| Piek koppel | 10N·m |
| Nominale stroom | 7.84A |
| Geen belastingstroom | 1A |
| Encoder Type | Dual Encoder (ABS-17bit / 18bit) |
| Communicatie | EtherCAT + CAN Bus |
| Gewicht | 0.33kg |
| Afmeting | Ø55mm × 55.5mm |
Toepassingen
-
Humanoïde Robots – Gewrichtsaandrijvingen voor armen, benen en torso
-
Bionische Been Aandrijvingen – Hoge koppel met anti-buig ontwerp voor hardloop- en springgangen
-
Collaboratieve Robots – Soepele bewegingscontrole voor industriële automatisering
-
Exoskeletten – Lichtgewicht, hoog-dynamische actuatoren voor mens-assisterende apparaten
-
Flexibele Productielijnen – Multi-as synchronisatie via EtherCAT hoge-snelheid communicatie
Verpakking & Accessoires
-
Voeding + CAN Bus Communicatiekabel ×1
-
120Ω Eindweerstand ×1
EtherCAT Communicatiekabel ×2
-
CAN Bus Communicemodule ×1 (USB-CAN adapter inbegrepen per bestelling)
Verpakkingsafmetingen: 100mm × 100mm × 70mm
Details

RMD-X4-PT2.5-10-C dual encoder robot gewrichtsaandrijving met 24V invoer, 12.6 overbrengingsverhouding, 4N·m koppel en 100W uitgang. Kenmerken zijn CAN BUS/EtherCAT interface, 317RPM zonder belasting snelheid en 0.28kg gewicht. Inclusief installatieafmetingen en technische specificaties.

Planetaire actuator met 10N.m piekkoppel, 12.6:1 overbrengingsverhouding, 0.33kg gewicht. Afmetingen: Ø55mm×55.5mm. Kenmerken zijn EtherCAT/CANBUS communicatie, dual encoder, high-speed MCU, CAN chips en diepe groefkogellagers.

Dual Encoder ABS-17BIT Invoer / 18BIT Uitvoer, X4-10, SN:40225621, MYACTUATOR

MYACTUATOR's RMD-X4-10 Planetaire Actuator biedt 100W vermogen, 46Nm koppel, dual encoder, 238rpm snelheid. Wordt geleverd met stroom + CAN BUS kabel, 120Ω weerstand, EtherCAT kabel, CAN BUS module en gratis USB-CAN adapter.
De RMD-X4-10 Robotic Planetary Actuator heeft een dual encoder, 12.6 overbrengingsverhouding, 24V invoer, 100W uitvoer, en CAN BUS/EtherCAT. Het levert 4N.m koppel, 238 RPM snelheid, weegt 0.33kg, en maakt gebruik van diepe groefkogellagers voor hoge efficiëntie.

X4-10 interface omvat stroom, CAN, en EtherCAT poorten. De verpakking bevat voeding, kabels, weerstanden, en module. Afmetingen: 100x100x70mm. Inclusief USB-CAN adapter bij elke bestelling.

X4-10 accessoires omvatten voeding, CAN BUS en EtherCAT kabels, terminalweerstand, en een CAN BUS module. Details omvatten connectors, draadfuncties, signaallijnen, en aantekeningen over de USB-CAN adapter.
Related Collections






