





MyActuator RMD-X4-36 34N·m planetaire actuator DC borstelloze motor met dubbele encoder, EtherCAT & CAN-bus, 36:1 overbrengingsverhouding
MyActuator RMD-X4-36 34N·m planetaire actuator DC borstelloze motor met dubbele encoder, EtherCAT & CAN-bus, 36:1 overbrengingsverhouding
MyActuator
Kan beschikbaarheid voor afhalen niet laden
Overzicht
De MyActuator RMD-X4-36 Planetary Actuator DC Borstelloze Motor is een hoogpresterende gewrichtsactuator ontworpen voor robotica en automatiseringssystemen die nauwkeurige bewegingscontrole, hoge koppeloutput en compacte integratie vereisen. Met een 34N·m piekkoppel, 36:1 overbrengingsverhouding, en een gekruiste rollagerstructuur, biedt het uitstekende buigweerstand en duurzaamheid. Met EtherCAT + CAN dubbele communicatprotocollen en een 250μs ultra-snelle respons, is deze actuator ideaal voor humanoïde robots, robotarmen, mobiele platforms en andere geavanceerde robottoepassingen. Het dubbele encodersysteem (ABS 17-bits invoer / 18-bits uitvoer) zorgt voor een ultra-hoge positioneringsnauwkeurigheid, terwijl de compacte afmetingen (55mm × 61mm, 0.36kg) een lichte en efficiënte integratie mogelijk maken.
Belangrijkste Kenmerken
-
Hoogprecisie Dubbele Encoder: 17-bits (invoer) + 18-bits (uitvoer) voor 0.01° nauwkeurigheid.
-
EtherCAT + CAN Bus Protocollen: Flexibele communicatie met 250μs ultra-snelle respons.
-
Kruisrollagers: Superieure anti-buigprestaties en lange levensduur.
-
Hoge Vermogensdichtheid: Compacte diameter van 55mm, lengte van 61mm en slechts 0.36kg gewicht.
-
Piek Koppel 34N·m en Nominaal Koppel 11.5N·m zorgen voor een stabiele, krachtige bewegingsoutput.
-
Hoge Efficiëntie: 100W nominale kracht met soepele FOC (Field-Oriented Control) technologie.
-
Veelzijdige Toepassing: Ontworpen voor humanoïde robots, exoskeletten, manipulators en automatiseringssystemen.
Specificaties
| Parameter | Waarde |
|---|---|
| Model | RMD-X4-P36-36-C |
| Ingangsspanning | 24V |
| Overbrengingsverhouding | 36:1 |
| Onbelaste snelheid | 111 RPM |
| Onbelaste stroom | 0.9 A |
| Nominale snelheid | 83 RPM |
| Nominaal koppel | 11.5 N·m |
| Nominaal uitgangsvermogen | 100 W |
| Piek koppel | 34 N·m |
| Piek fase stroom | 21.5 A (rms) |
| Paar Polen | 13 |
| Encoder Type | Dual Encoder ABS 17-bits (Ingang) / 18-bits (Uitgang) |
| Communicatieprotocollen | EtherCAT / CAN Bus |
| Grootte | Ø55mm × 61mm |
| Gewicht | 0.36 kg |
Inhoud van het pakket
-
1 × RMD-X4-36 Planetair Actuator Motor
-
1 × Voeding + CAN Bus Communicatiekabel
-
1 × 120Ω Eindweerstand
-
2 × EtherCAT Communicatiekabels
-
1 × CAN Bus Communicatiemodule (USB-CAN adapter)
Toepassingen
-
Humanoïde en bionische robots
-
Collaboratieve robotarmen
-
Exoskeletten en revalidatierobots
-
Servicerobots en mobiele platforms
-
Precisie automatiseringssystemen die compacte, hoogkoppel actuators vereisen
Details

Planetaire actuator met 34N.m piek koppel, 36:1 overbrengingsverhouding, 0.36kg gewicht, Ø55mm×61mm formaat. Kenmerken EtherCAT/CANBUS communicatie, dubbele encoder, high-speed MCU, CAN-chips en gekruiste rollagers.

RMD-X4-P36-36 motor: 24V, 10.5N.m koppel, 83RPM, dubbele encoder, EtherCAT+CAN BUS, 36 overbrengingsverhouding, 0.36kg, ABS-17BIT/18BIT encoder, gedetailleerde afmetingen inbegrepen.

X4-36 motor, 100W, 12N.m, dubbele encoder, 17BIT invoer, 18BIT uitvoer, 63rpm, 1:36 overbrengingsverhouding, CAN bus interface, LED-indicator.

MYACTUATOR X4-36 motor, 100W, 12N.m, dubbele encoder, 83rpm, 1:36 verhouding. Inclusief voeding, CAN BUS-kabel, 120Ω weerstand, EtherCAT-kabels en CAN BUS-module met gratis USB-CAN-adapter.
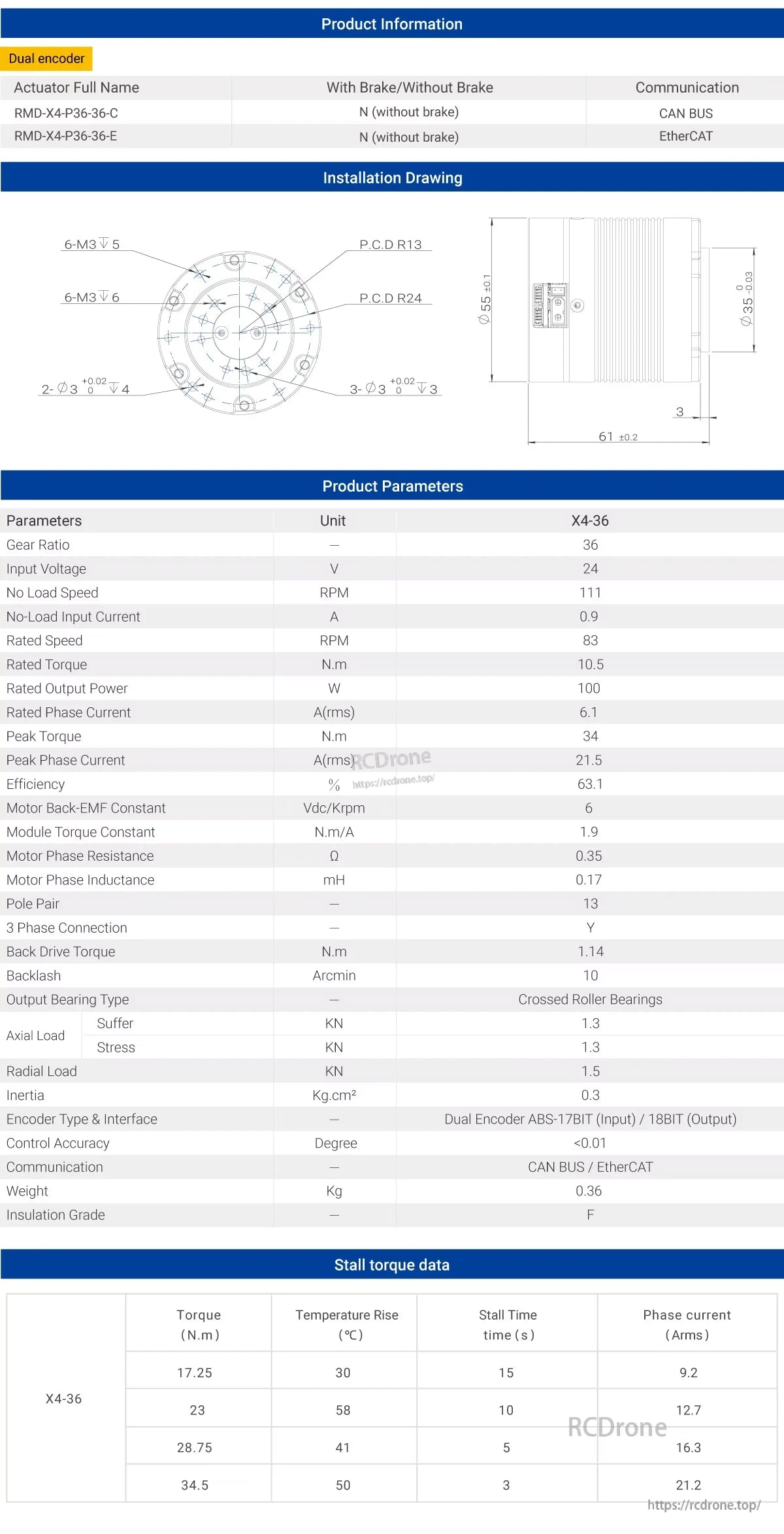
RMD-X4-P36-36 motor heeft een dubbele encoder, 36 overbrengingsverhouding, 24V invoer, 100W uitvoer, CAN BUS/EtherCAT. Genomineerd koppel: 10.5 N.m, snelheid: 83 RPM, gewicht: 0.36 kg. Stall koppelgegevens omvatten koppel, temperatuurstijging, tijd en fase stroomwaarden.

Interface details omvatten stroom, CAN en EtherCAT poorten. Verpakking bevat motor, kabels, weerstanden, communicatie modules. Afmetingen: 100x100x70mm. Inclusief USB-CAN adapter.
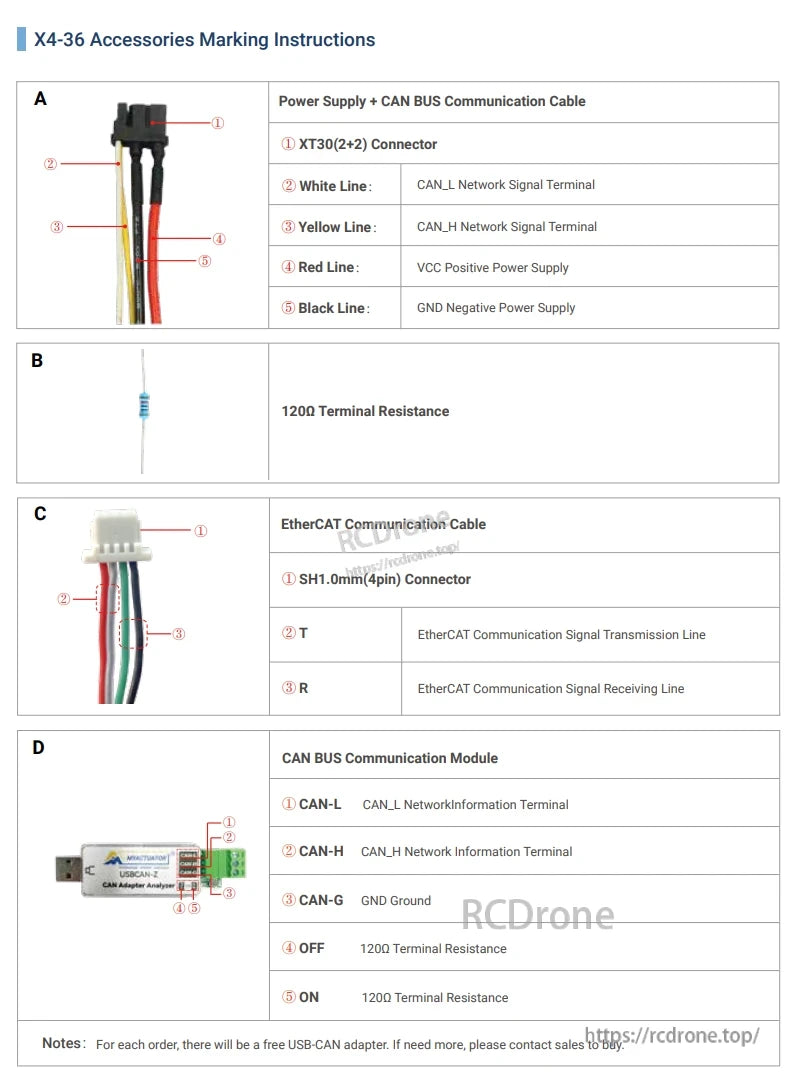
X4-36 accessoires omvatten voeding, CAN BUS, EtherCAT kabels, 120Ω weerstand en CAN module. Details omvatten connectors, draadkleuren, signaallijnen en terminalinstellingen voor communicatie- en stroomverbindingen. USB-CAN adapter inbegrepen bij elke bestelling.
Related Collections





