Pixhawk 2.4.8 PX4 PIX 32-bits vluchtcontroller SPECIFICATIES
Gebruik: Voertuigen en speelgoed met afstandsbediening
Onderdelen/accessoires upgraden: Frame
Gereedschapsbenodigdheden: Geslepen
Technische parameters: Waarde 3
Afstandsbediening Randapparatuur/Apparaten: Afstandsbediening
Aanbevolen leeftijd: 12+j,14+j
RC-onderdelen en -accessoires: Snelheidsregelaars
Herkomst: Vasteland China
Modelnummer: Pixhawk 2.4.8
Materiaal: Metaal
Kenmerken van vierwielaandrijving: Motoren
Voor voertuigtype: Vliegtuigen
Merknaam: Readytosky
ReadyToSky is een professionele leverancier van FPV RC-moduleaccessoires. Als u meer wilt weten over groothandels- of bulkaankoopopties, neem dan gerust contact met ons op.
Kenmerken:
Pixhawk 2.4.8 ondersteunt de nieuwste officiële Arduino-firmware en PX4-firmware.
1. De geavanceerde 32-bits ARM CortexM4 krachtige processors (2 MB flash) kunnen het NuttX RTOS real-time besturingssysteem uitvoeren;
2. 14 PWM/servo-uitgang;
3. Businterface (UART, I2C, SPI, CAN);
4. De geïntegreerde back-upvoeding en back-upcontroller vallen uit, de primaire controller schakelt over naar de back-upcontrole is veilig;
5. Bied automatische en handmatige modi;
6. Zorg voor redundante voedingsinvoer en failover;
7. Meerkleurige LED-verlichting;
8. Zorg voor een meertonige zoemerinterface
9. Micro SD-opname van vluchtgegevens;
Specificaties:
Interface
1,5 hoogspanningscompatibele UART 1, 2 met hardwarestroomregeling
2. 2 KAN
3.Spektrum DSM / DSM2 / DSM-X satellietontvanger compatibele ingang
4.Futaba SBUS-compatibele in- en uitgangen
5.PPM signaalinvoer
6.RSSI (PWM of spanning) Ingang
7.I2C
8.SPI
9.3.3 en 6.6VADC-ingang
10. Externe MICRO USB-interface
Pixhawk OSD OLED-display voor Pixhawk 2.4.8 PIX PX4 Flight Control Vluchtdisplay Vluchtstatus Verbonden met I2C-interface
Het is geschikt voor de vluchtbesturing van Pixhawk enz. en wordt gebruikt om de statusinformatie van vliegtuigen weer te geven. Deze module is aangesloten op de I2C-interface van Pixhawk
Opmerking: Om de firmware van het beeldscherm te upgraden naar 3.5 of hoger, stelt u NTF_DISPLAY_TYPE in op 1 in de Massion Planner en start u Pixhawk opnieuw op.
HOE gebruik ik de WIFI-module voor PIXHAWK?
1.Hoe verbinding maken?
gebruik 6P-lijnverbindingen met Pixhawk-vluchtcontroller.
Vanwege de verschillende firmware kunnen bij sommige firmware twee poorten worden gebruikt, terwijl sommige firmware slechts één van de poorten kan gebruiken. Zoek dus een van de beschikbare poorten voor de verbinding.
Als u PX4-firmware gebruikt, kan alleen TELEM1 worden gebruikt, maar TELEM2 niet.
Voor Ardupilot-firmware wordt aanbevolen om de TELEM2-poort te gebruiken. Of zoek een van de beschikbare poorten voor de verbinding.
Voor PX4-firmware moet de TELEM1-poort worden gebruikt.
2.Hoe te gebruiken?
Let op: Wanneer u een Wifi Radio Telemetrie-verbinding gebruikt, moet deze een 3DR-voedingsmodule of 5V ESC gebruiken om stroom te leveren aan de vluchtbesturing. USB kan niet worden aangesloten omdat de USB-prioriteit hoger is dan Radiotelemetrie. Als de USB-kabel is aangesloten, kan deze niet worden gebruikt voor radiotelemetrietransmissie.
De naam van de wifi-hotspot is Drone, dus gebruik een telefoon of computer om verbinding te maken met deze hotspot. Het wachtwoord is 12345678.
Opmerking:Sommige apparaten (bijvoorbeeld een iPhone IOS-systeem) kunnen het IP-adres niet automatisch verkrijgen. U moet dit handmatig instellen.
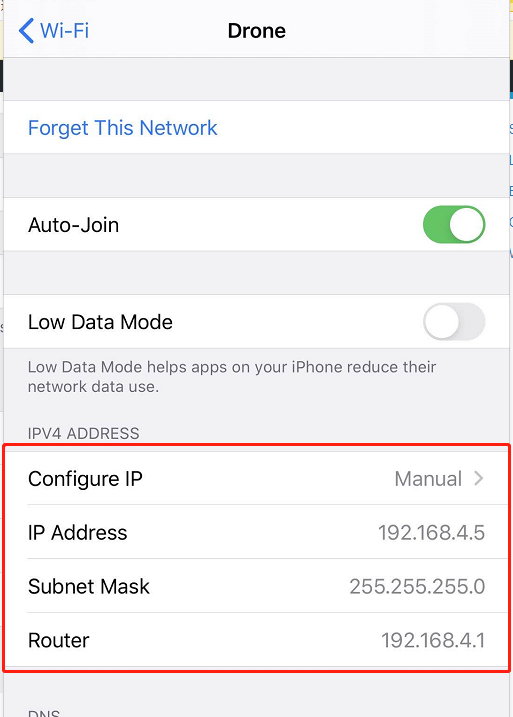
Stel IP configureren in op Handmatig. Stel het IP-adres in als “192.168.4.5” of anders, maar kan niet worden ingesteld als “192.168.4.1″. Het laatste getal mag niet hoger zijn dan 254. Stel het subnetmasker in als “255.255.255.0” (deze waarde moet worden ingesteld, andere niet). Stel de router in als “192.168.4.1” (moet deze waarde instellen, andere niet)
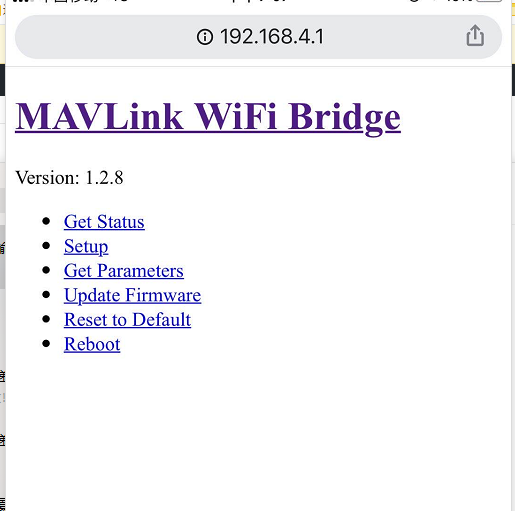
Wanneer uw apparaat succesvol verbinding heeft gemaakt met deze hotspot, kunt u de browser gebruiken om http://192.168.4.1 te bezoeken en de parameter te wijzigen.
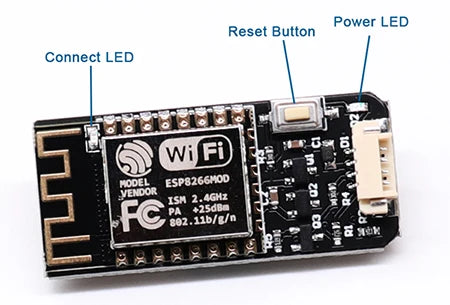
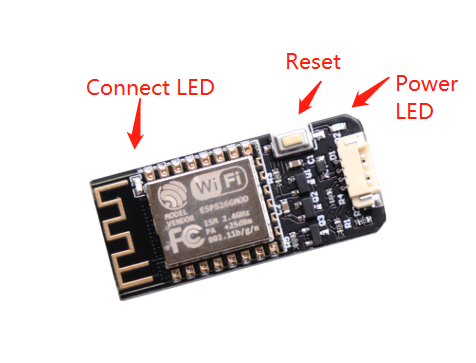
Let op: de knop is een resetknop en geen herstartknop. Wanneer u op de knop drukt, worden alle parameters op de standaardwaarde gezet als u een parameter wijzigt.
Power-LED: bij het inschakelen brandt de rode LED.
LED verbinden: wanneer de verbinding met grondbediening (bijvoorbeeld Mission Planner of Qgroundcontrol) succesvol is, knippert de blauwe LED. wanneer de verbinding met de grondbediening wordt verbroken, brandt de blauwe LED.
1.Hoe te gebruiken voor Missieplanner?
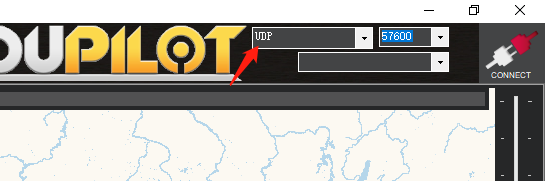
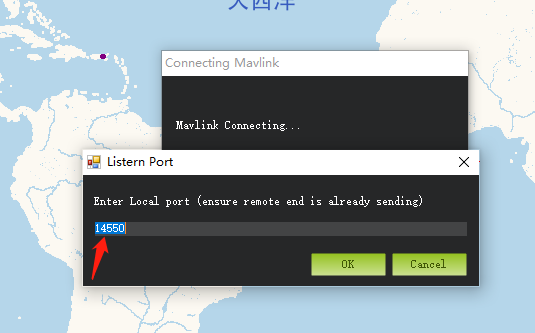
Verbind eerst uw pc met succes met de hotspot Drone. Selecteer UDP. Klik vervolgens op de knop 'Verbinden' en gebruik de 14550-poort. Klik op “Ok”. Het is niet nodig om de baudrate te kiezen. De standaard baudrate van de wifi-module is 57600. Maar 115200 of iets anders kan ook werken.
2.Gebruik voor telefoon
Voor Android: download qgroundcontrol (alleen voor pixhawk, niet voor APM)
vanaf hier,http://qgroundcontrol.com/downloads/
DroidPlanner hier downloaden,https://github.com/DroidPlanner/Tower/releases
Voor iPhone(IOS): Zoek qgroundcontrol in de app store.
qgroundcontrol (alleen voor pixhawk, niet voor APM) kan automatisch verbinding maken, DroidPlanner moet de poort 'UDP' en '14550' kiezen voordat hij verbinding maakt met groundcontrol.
WIFI V3.0 gebruikt 32-bits CPU, ondersteunt TCP en UDP
WIFI V3.0 DroneBridge-website
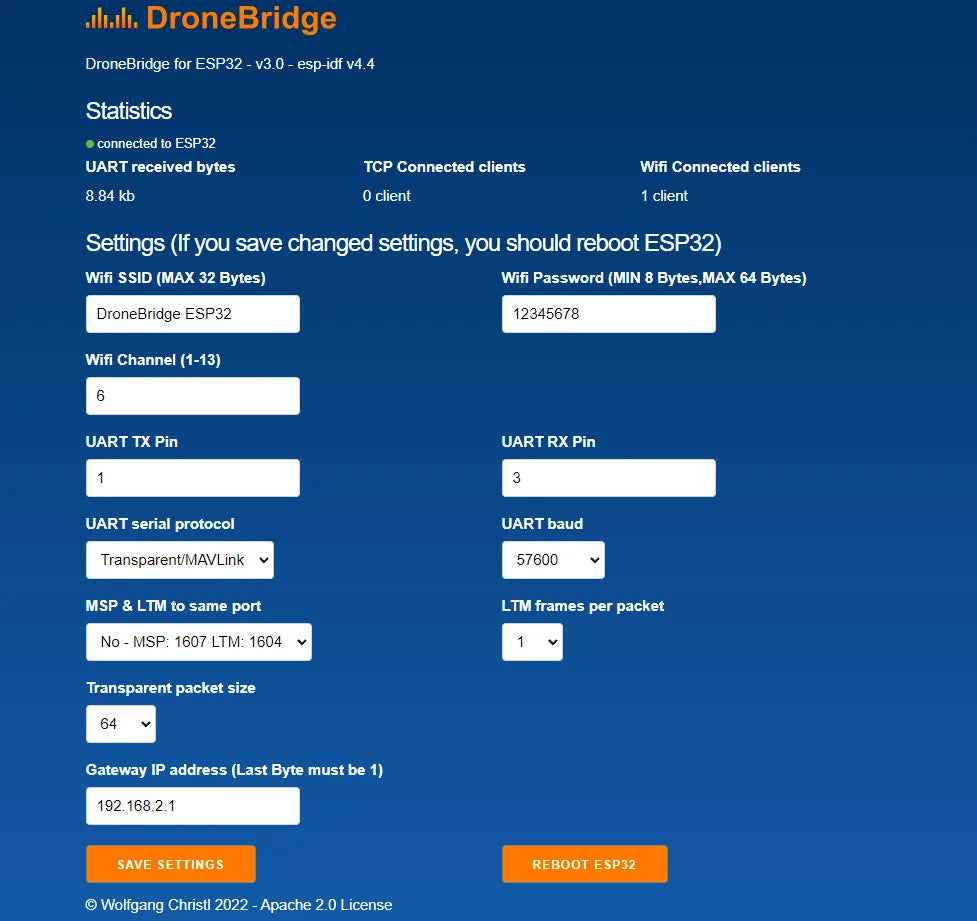
ulul; DroneBridge voor ESP32 v3.0 esp idf v4.4 Statistiek verbonden met ESP 32 UART ontvangen bytes TCP Verbonden clients Wifi Wachtwoord (MIN 8 Bytes,MAX 64 Bytes) Als u de gewijzigde instellingen opslaat, moet u ESP33 opnieuw opstarten.
(verzend het naar keuze)

Pixhawk 2.4.8 FC + 4G TF-kaart + MBN GPS GPS-houder+ OSD + voedingsmodule Schokdemper I2C PPM RGB-veiligheidsknop Zoemer Wifi-telemetriedraden Ontk 'GPs-module PPM 1'

Het pakket bevat: Pixhawk 2.4.8 vluchtcontroller, een 4G TF-kaart, schokdemper, I2C-module, PPM-module, RGB-module, OLED-display, veiligheidsknop met zoemer en draden voor alle componenten.
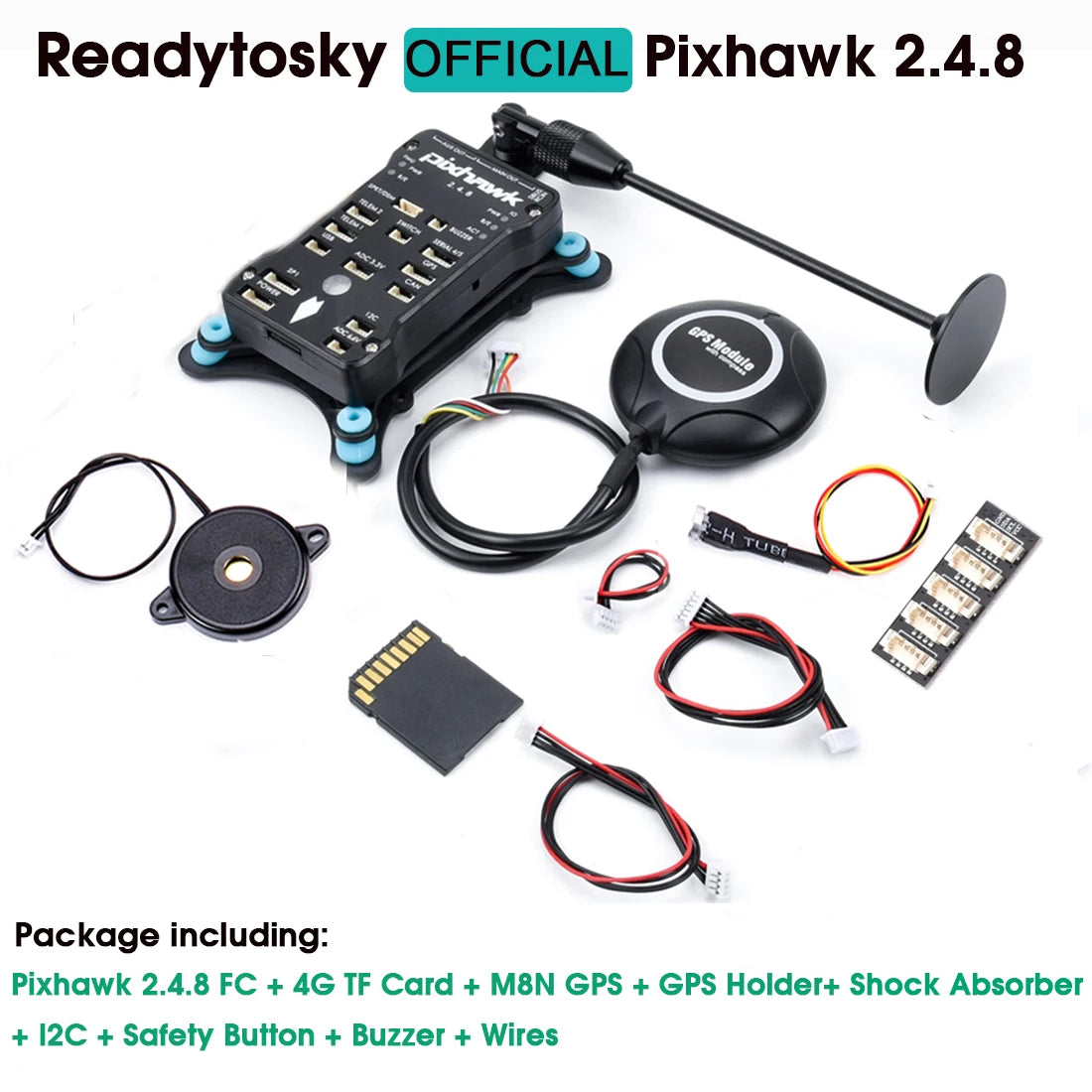
Het pakket bevat: Pixhawk 2.4. 8 vluchtcontroller, een 4G TF-kaart, MBN GPS-module, GPS-houder, schokdemper, I2C-veiligheidsknop, zoemerdraden en een optionele telemetriemodule voor draadloze gegevensoverdracht.

Het pakket bevat: Pixhawk 2.4.8 vluchtcontroller, 4G TF-kaart, schokdemper, OLED-display, I²C-module, PPM-module (pulspositiemodulatie), veiligheidsknop met zoemer en draden.

Deze Pixhawk 2.4.8-vlucht controller wordt geleverd met een 4G TF-kaart, veiligheidsknop, zoemer en draden voor hulpuitgangen. Het beschikt ook over een TELEM-module met twee stroomingangen, een seriële poort en ADC-kanalen (analoog-naar-digitaal converter). Bovendien heeft het GPS-mogelijkheden en heeft het stroom nodig om te functioneren.

VCC-, GPS- en SD-kaartkalibratie zijn nodig in de modus 'Gestabiliseerd' met een batterijspanning van 11,32 V. Bovendien zijn er geen GPS-gegevens beschikbaar. Voorinschakeling is ingediend en EKF (Extended Kalman Filter) is ingeschakeld.