




ROBOTERA XHAND 1 Robothand - 12 DoF, 270° tactiele vingertoppen, 80N grip, 25 kg hefvermogen, EtherCAT/RS485, ROS-klaar
ROBOTERA XHAND 1 Robothand - 12 DoF, 270° tactiele vingertoppen, 80N grip, 25 kg hefvermogen, EtherCAT/RS485, ROS-klaar
ROBOTERA
Kan beschikbaarheid voor afhalen niet laden
Overzicht
ROBOTERA XHAND 1 is een robothand met vijf vingers, uitgerust met volledige direct-drive gewrichtmodules en 12 actieve vrijheidsgraden (DoF). De hand is van menselijke handgrootte (191 mm x 94 mm x 47 mm) en ontworpen voor behendige manipulatie met hoge-resolutie tactiele sensoren, robuuste gripkracht en ontwikkelaarsvriendelijke interfaces voor robotica-onderzoek en integratie.
Belangrijkste Kenmerken
- Volledige direct-drive architectuur met geïntegreerde tandwielgestuurde, krachtgecontroleerde gewrichtmodules (3 in de duim; 9 over de andere vier vingers).
- 12 volledig actieve DoF; laterale swing van de wijsvinger van +/-15° voor complexe manipulatie in de hand.
- Hoge gripprestaties: vingertopkracht 15N; maximale gripkracht 80N; maximaal te grijpen gewicht tot 25 Kg (handpalm omhoog) en 16 Kg (handpalm naar links).
- Hoge snelheid actuatie die >2Hz open/sluiten herhaling ondersteunt; aangetoonde vingerklik tot 10 CPS (Klikken Per Seconde).
- 270° vingertop tastbare dekking met vijf driedimensionale tastarray-sensoren; volledige handresolutie 12x10 per vingertop x 5.
- Driedimensionale krachtsensoren inclusief tangentiële krachten (X en Y); vingertop herpositioneringsnauwkeurigheid +/-0,20 mm.
- Achterdrijfbaar met demping <= 0,1 Nm; stroomlus krachtregeling en kracht-positie regeling voor conforme interactie.
- Ontwikkelaarsvriendelijke connectiviteit: EtherCAT en RS485 (USB); compatibel met ROS1/ROS2, Ubuntu (Linux), x86 en ARM-architecturen, TwinCAT, en gangbare robotarmen (inclusief xARM, Realman, UR).
- Duurzaamheid beoordeeld op 1.000.000 onbelaste grijpcycli; bedrijfstemperatuur -20°C ~ 60°C.
Voor vragen, integratieondersteuning of inkoop in bulk, neem contact op [email protected] or bezoek https://rcdrone.top/.
Specificaties
| Parameter | Waarde |
|---|---|
| Gewicht | 1100 g |
| Afmetingen (L x B x H) | 191 mm x 94 mm x 47 mm (De grootte van een volwassen hand) |
| Actieve DoF (Totaal) | 12 |
| Passieve DOF (Totaal) | 0 |
| DoF Toewijzing | Duim x 3; Wijsvinger x 3; Middelvinger x 2; Ringvinger x 2; Pink x 2 |
| Duim Activering/Overdracht | 3 tandwielgestuurde krachtgecontroleerde gewrichtmodule |
| Viervinger Activering/Overdracht | 9 tandwielgestuurde krachtgecontroleerde gewrichtmodule |
| Vingerpuntconfiguratie | Ronde of Afgeronde Vingerpunten |
| Laterale Swing | -15°~+15° (Index) |
| Fingertop Herhaal Positie Nauwkeurigheid | +/− 0.20 mm |
| Besturingsmodi | Positiecontrole (lage demping/hoge demping), stroomlus krachtcontrole, kracht-positie controle |
| Vingerkracht | 15N |
| Maximale Gripkracht (hele hand) | 80N |
| Maximale Grijpkracht (palm naar links) | 16 Kg |
| Maximale Grijpkracht (palm omhoog) | 25 Kg |
| Duim Verste Tegenovergestelde | Kleine Pink |
| Open/sluit Herhalingssnelheid | >2Hz |
| Achteruitdrijf Demping (Achteruitdrijfbaar) | <= 0.1 Nm |
| Tactiele Dekking | 270° vijfvinger vingertop omhulsel |
| Aantal Tactiele Sensoren | Vijf 270° driedimensionale omhulsel tactiele array sensoren op vijf vingertoppen |
| Tactiele Resolutie (hele hand) | 12x10 (270° omhulsel per vingertop) x 5 |
| Tactiele Meetdimensies | Driedimensionale krachtmeting (Inclusief tangentiële krachten X en Y) |
| Hele-hand Controle Frequentie | 83Hz |
| Communicatie Snelheid | EtherCAT: 100MHz; RS485: 3MHz |
| Meetparameters | Vingertoppen: 120 driedimensionale profilering array krachten; Gewrichten: positie, snelheid, temperatuur, stroom (koppel) |
| Controleparameters | Gewrichtspositie; gewrichtskoppel; gewrichtsrigiditeitscoëfficiënt; gewrichtsdempingscoëfficiënt |
| Geen belasting Grijpcycli | 1.000.000 cycli |
| Bedrijfstemperatuurbereik | -20°C ~ 60°C |
| Werkspanning | 24V ~ 72V |
| Statische stroom | 0.15A @48V, 7W |
| Maximale Stroom | 2.5A @48V, 120W |
| Communicatie-interface | RS485 (USB), EtherCAT |
Toepassingen
- Teleoperatie: ondersteunt MR en handschoenteleoperatie; Vision Pro teleoperatie; Manus Handschoenen; Pico/Meta Quest.
- Robotarm en humanoïde integratie: compatibel met xARM, Realman, UR en andere robotarmen.
- Onderzoek en simulatie: nauwkeurige URDF, tactiele sensor simulatie; geschikt voor versterkend leren met Isaac Gym en Mujoco.
- Mens-machine interactie en bediening van menselijke gereedschappen met conforme krachtcontrole.
Handleidingen
Xhand_adapter.stp
MH2.25_rechts_stp.zip
MH2.25_links_stp.zip
XHand_Control_ROS_Documentation.pdf
X-Hand_1_Product_Handleiding_1.0.pdf
X-Hand_1_Gebruikers_Snelstart_Instructies_1.0.pdf
Details

ROBOTERA XHAND1 robotische hand met volledige directe aandrijving, die echte vrijheid en geavanceerde behendigheid biedt.

XHAND1 van ROBOTERA: humanoïde hand met vijf vingers met 12 vrijheidsgraden, 270° tactiele sensoren per vingertop, 80N gripkracht, 25kg draagvermogen. Ontworpen voor complexe taken en gereedschapsbehandeling.

XHAND 1: Eerste behendige hand met directe aandrijvingsmodules per gewricht. Beschikt over krachtige draadloze motoren, laagdempende reductoren, precisie-encoders en zelfontwikkelde geïntegreerde gewrichtmodules voor geavanceerde robotmanipulatie.
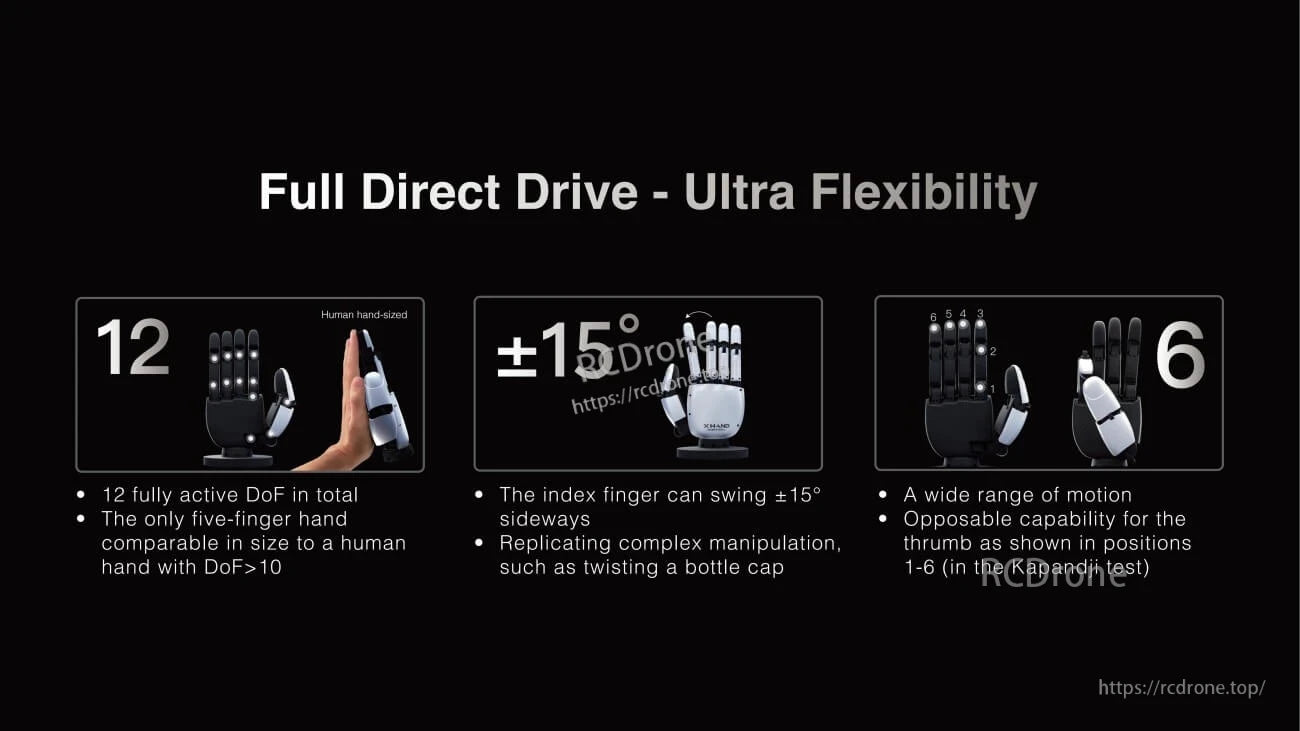
ROBOTERA XHAND 1 is een ultra-flexibele, mensgrote robotische hand met 12 actieve vrijheidsgraden. De wijsvinger beweegt ±15° zijwaarts voor complexe taken, en de duim biedt zes tegenovergestelde posities voor veelzijdige manipulatie.

ROBOTERA XHAND 1: 25 kg belasting, 80 N gripkracht, volledige directe aandrijving, overtreft vergelijkbare oplossingen met koppelingen/tendons.

Volledige directe aandrijving robot hand bereikt 10 CPS met tandwiel aangedreven snelheid, koppel boven 1 Nm, presteert beter dan koppeling- en tendonsystemen voor superieure gameprestaties.

ROBOTERA XHAND 1 heeft 270° vingertop sensoren met >100 punten en 0,05 N nauwkeurigheid voor 3D kracht, tactiele en temperatuurdetectie, wat zorgt voor superieure gripprestaties.
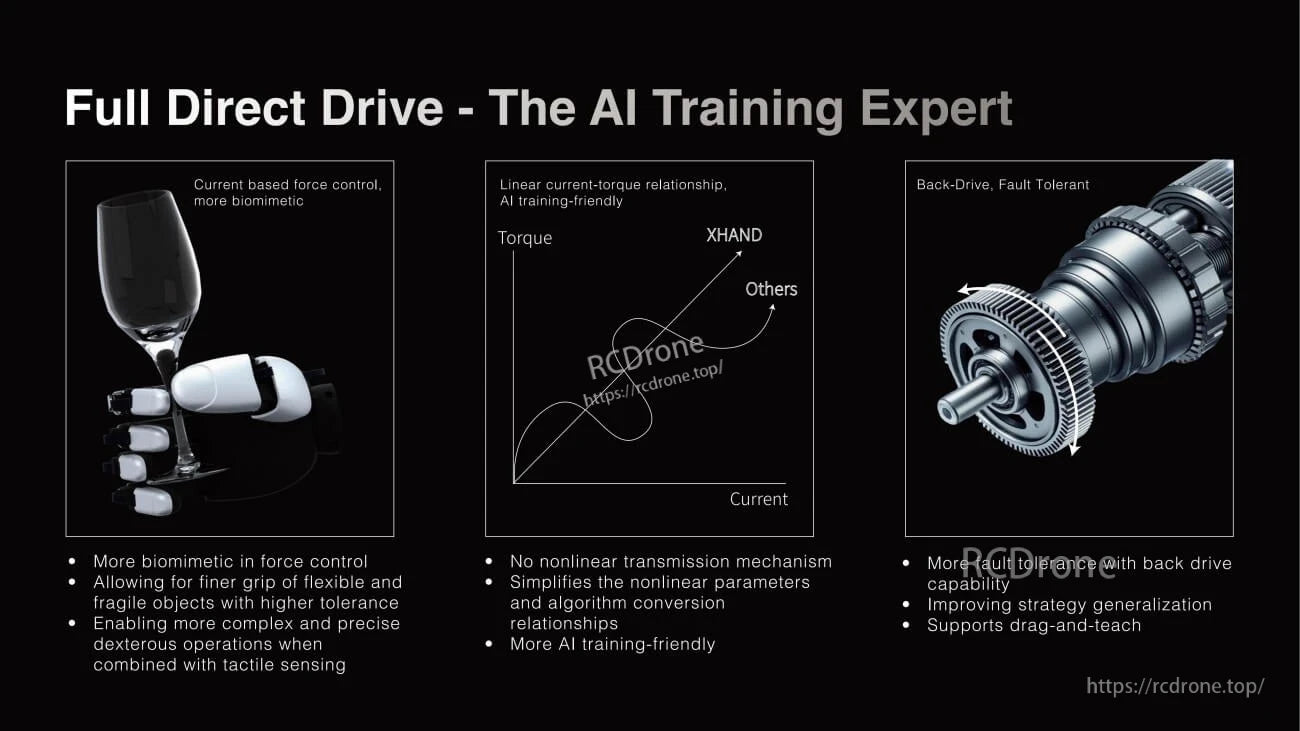
ROBOTERA XHAND 1 biedt biomimetische krachtcontrole, lineaire koppel-stroom respons voor AI-training, en terugdrijf fouttolerantie—wat nauwkeurige hantering, vereenvoudigde algoritmen, sleep-en-leer ondersteuning en verbeterde strategie generalisatie mogelijk maakt.
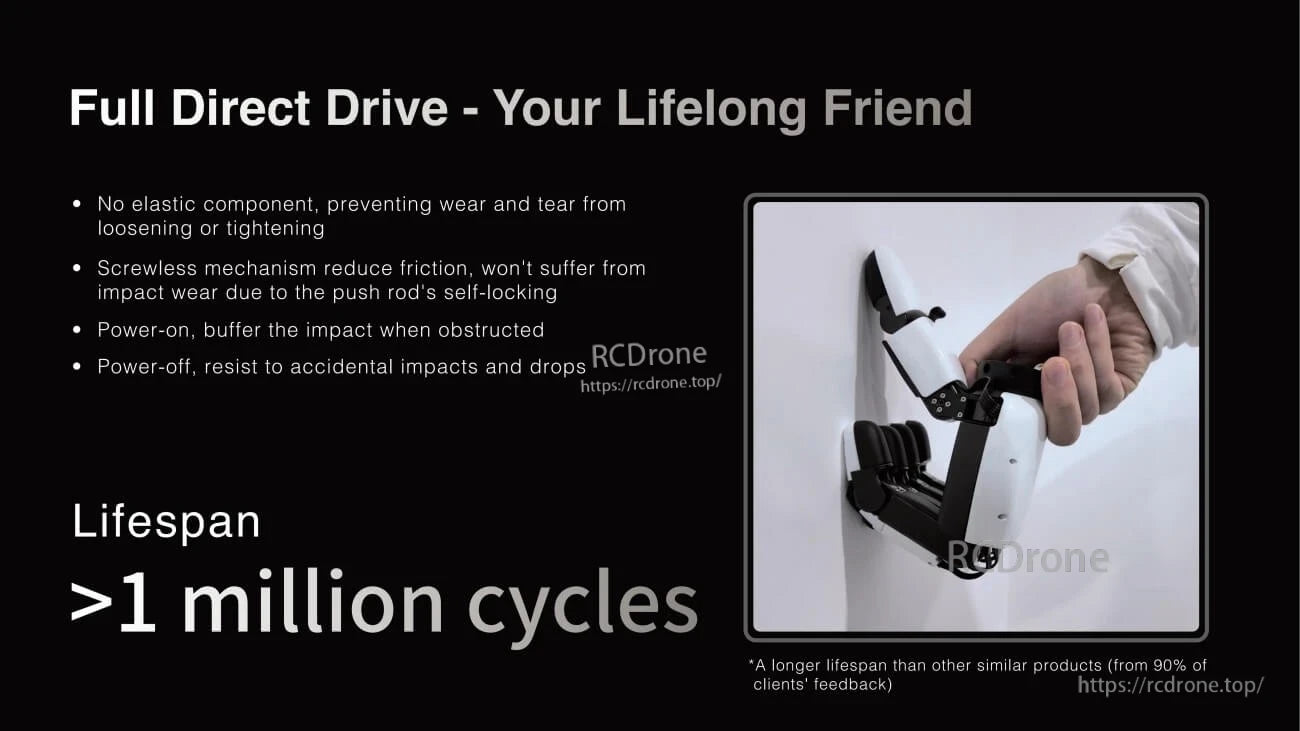
Volledige Direct Drive robot hand biedt duurzaamheid zonder elastische onderdelen of schroeven, impactbuffering wanneer ingeschakeld, valbestendigheid wanneer uitgeschakeld, en een levensduur van meer dan een miljoen cycli—overtreft vergelijkbare producten volgens klantfeedback.

ROBOTERA XHAND 1 ondersteunt MR en handschoenteleoperatie, compatibel met ROS1/ROS2 en Ubuntu op x64/ARM. Beschikt over EtherCAT/TwinCAT/RS485 voor integratie met xARM, Realman, UR-robotarmen. Biedt nauwkeurige URDF-modellering en simulatie van tactiele waarneming. Ontworpen voor ontwikkelaarsvriendelijke robotica-toepassingen met cross-platform flexibiliteit en geavanceerde controleprotocollen.
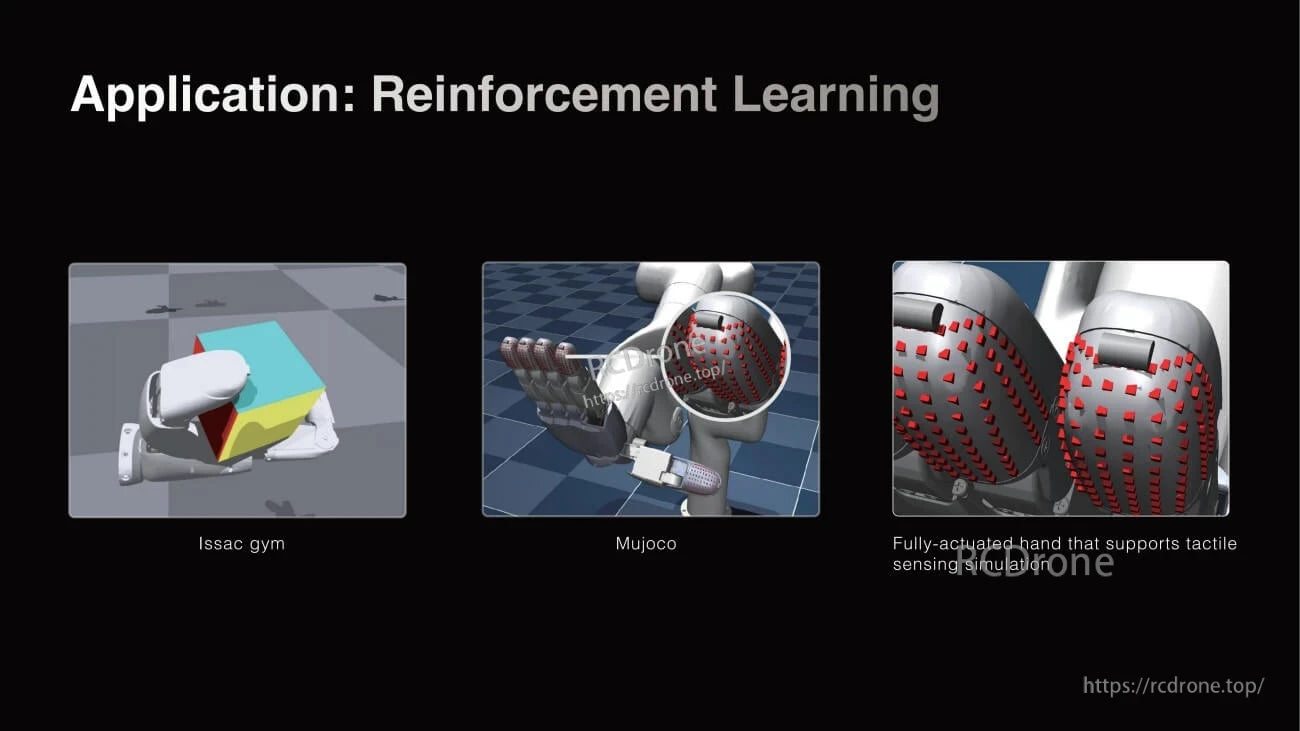
Toepassingen van versterkend leren: Issac gym, Mujoco, en volledig geactueerde hand met simulatie van tactiele waarneming voor geavanceerde robotcontrole en trainingsomgevingen.
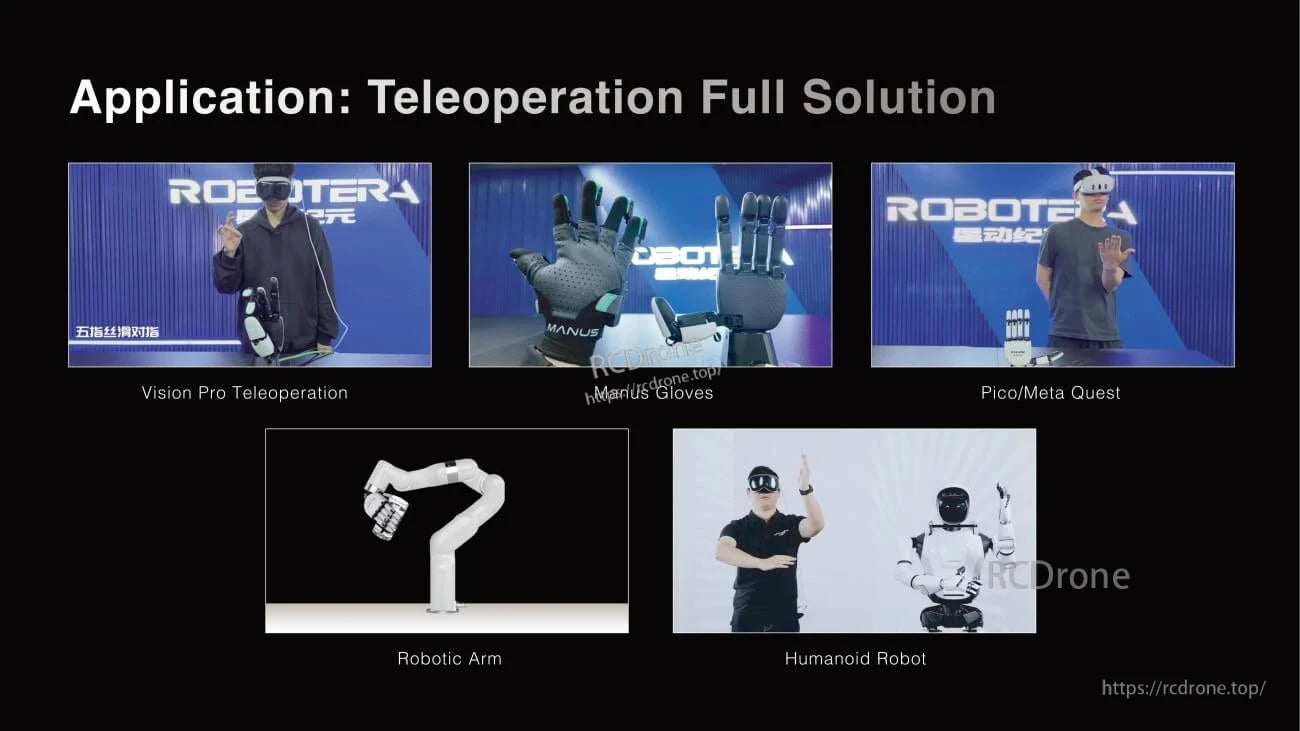
Teleoperatie volledige oplossing met Vision Pro, Manus Handschoenen, Pico/Meta Quest, robotarm en humanoïde robot voor geavanceerde afstandsbediening.
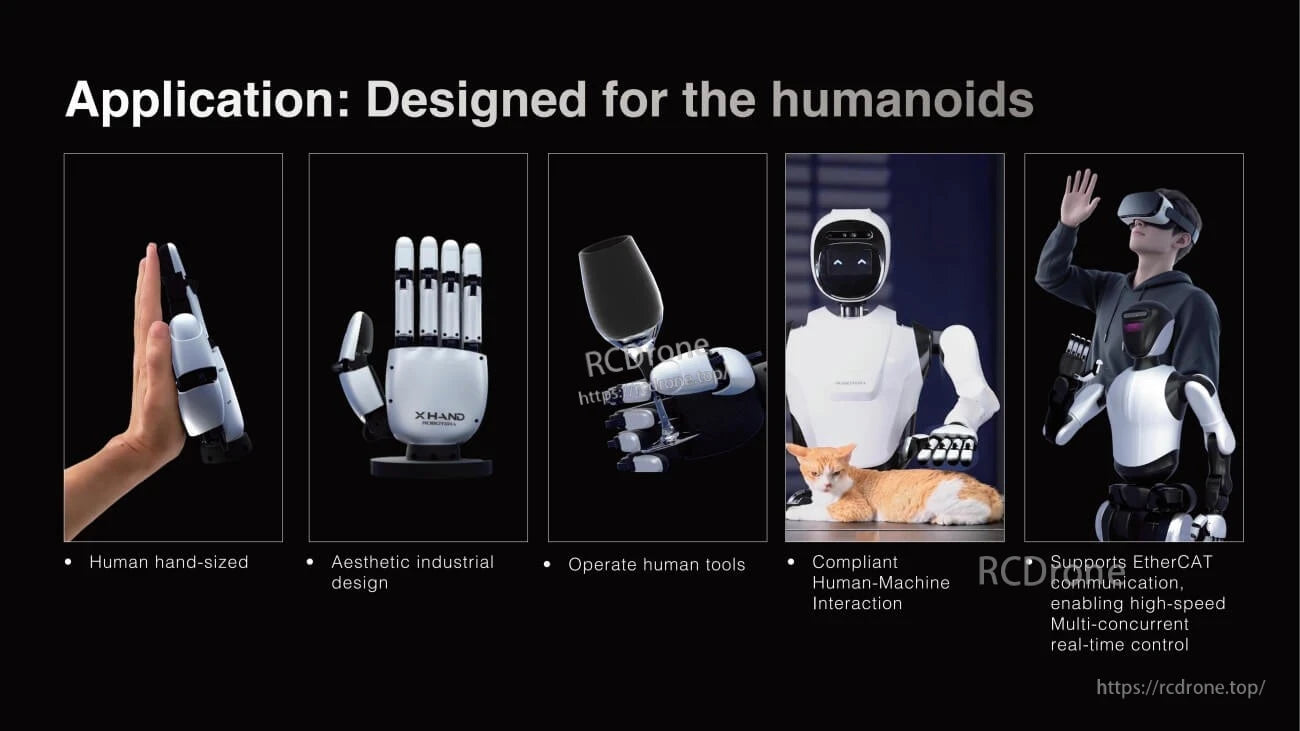
Mensgrote robothand met esthetisch ontwerp, bedient gereedschappen, maakt conforme interactie mogelijk, ondersteunt EtherCAT voor realtime controle.
Related Collections




