



S2-F290 Programmeerbare drone - Pixwawk Open Source ROS SLAM AI Secundaire ontwikkeling Industrieel niveau voor Drone-uitdaging
S2-F290 Programmeerbare drone - Pixwawk Open Source ROS SLAM AI Secundaire ontwikkeling Industrieel niveau voor Drone-uitdaging
RCDrone
Kan beschikbaarheid voor afhalen niet laden
Overzicht
De S2-F290 programmeerbare drone is een high-performance industriële drone ontworpen voor secundaire ontwikkeling en drone-uitdagingen. Met een laadvermogen van 2400g, A 6S 6000mAh-batterij, en een maximale controleafstand van 10KM, het levert precisie met GPS-positioneringsnauwkeurigheid van ≈1–2m En windweerstand van niveau 3–4. Aangedreven door de Pixhawk 2.4.8 vluchtcontroller met open-source ROS SLAM-technologie, de drone ondersteunt geavanceerde functies zoals 3D LiDAR-mapping, YOLO-gebaseerde objectherkenning en formatievliegen. Zijn 3mm koolstofvezelframe garandeert uitzonderlijke duurzaamheid en stabiliteit, getest in extreme omstandigheden. Het platform is zeer aanpasbaar en biedt functies zoals Chinese/Engelse QGC-grondstationondersteuning, modulaire uitbreidbaarheid en uitgebreide tutorials, waardoor het ideaal is voor onderzoeks-, competitie- en ontwikkelingstoepassingen.
Specificatie
Vliegtuig
| Parameter | Specificatie |
|---|---|
| Naam | S2-F290 programmeerbare drone |
| Laadvermogen Gewicht | 2400 gram |
| Model | S2-F290 |
| GPS-positioneringsnauwkeurigheid | ≈1–2m |
| Wielbasis | 290mm |
| Maximaal startgewicht | 3190 gram |
| Batterij | 6S Standaard 6000mAh-batterij |
| Controle afstand | 10KM (aanbevolen binnen 1000m) |
| Windweerstand | Niveau 3–4 |
| Bedrijfsomgeving | Binnen/Buiten |
| Resultaten van de uithoudingstest | Details |
|---|---|
| Schroeven | 7 inch |
| Batterijcapaciteit | 6S 6000mAh (5300mAh gebruikt) |
| Omgeving | Windstil |
| Vluchttijd | 11 minuten 30 seconden |
Vluchtcontroller
| Onderdeel | Specificatie |
|---|---|
| FMU-processor | STM32H743 Cortex-M7, 480 MHz, 2 MB Flash, 1 MB SRAM |
| IO-processor | STM32F103 Cortex-M3, 72 MHz, 64 KB SRAM |
| Sensoren | Accelerometer/gyroscoop: ICM-42688-P |
| Accelerometer/gyroscoop: BMI055 | |
| Magnetometer: IST8310 | |
| Luchtdrukmeter: MS5611 | |
| Nominale spanning | Maximale ingangsspanning: 6V |
| USB-voedingsingang: 4,75-5,25V | |
| Servo-ingang: 0-36V | |
| Nominale stroom | Telemetrie 1 Maximale uitgangsstroom: 1A |
| Gecombineerde stroom voor andere poorten: 1A | |
| Mechanische gegevens | Afmetingen: 53,3 × 39 × 16,2 mm |
| Gewicht: 39.2 gram | |
| Havens | - 14 PWM-uitgangen (8 van IO, 6 van FMU) |
| - 2 algemene seriële poorten | |
| - 2 GPS-poorten | |
| - 1 I2C-poort | |
| - 2 CAN-poorten | |
| - RC-ingang voor Spektrum/DSM, S.BUS, CPPM, enz. | |
| - Stroomingangspoort | |
| Andere functies | Bedrijfstemperatuur: -40–85°C |
Boordcomputer
| Onderdeel | Specificatie |
|---|---|
| Rekenkracht | 40 TOPPEN |
| GPU | 32 Tensor-cores met 1024-core NVIDIA Ampere GPU |
| CPU | 6-core Arm Cortex-A78AE v8.2 64-bits, 1,5 GHz |
| RAM | 8 GB 128-bits LPDDR5 68 GB/s |
| Opslag | SD-kaart of externe NVMe |
| Maximale CPU-frequentie | 1,5 GHz |
Afstandsbediening
| Onderdeel | Specificatie |
|---|---|
| Bedrijfsspanning | 4,2V |
| Bedrijfsstroom | 100mA |
| Frequentieband | 2,4–2,483 GHz |
| Gewicht | 525 gram |
| Afmetingen | 130 × 150 × 20mm |
| Levensduur van de batterij | 20 uur |
| Oplaadpoort | MICRO-USB |
| Controlebereik | 7KM |
GPS
| Onderdeel | Specificatie |
|---|---|
| Satellietontvanger | UBLOX-M9, 92 kanalen |
| Elektronisch kompas | QMC5883L |
| Satellietsystemen | GPS L1 C/A, GLONASS L1OF, BeiDou B1, Galileo E1 |
| Satellietkanalen | 32 |
| Update-snelheid | 25Hz |
| Positioneringsnauwkeurigheid | 1,5 m CEP (ideale omgeving) |
| Opstarttijd | Koude start: 24s, warme start: 1s |
| Afmetingen | 25 × 25 × 8mm |
| Gewicht | 12 gram |
Batterij
| Onderdeel | Specificatie |
|---|---|
| Aansluitingstype | XT60 |
| Aanbevolen laadstroom | 3–5A |
| Batterijcapaciteit | 6000mAh |
| Nominale spanning | 22.2V |
| Ontladingssnelheid | 75C |
| Afmetingen | 50 × 44 × 158 mm |
| Gewicht | 816 gram |
LiDAR
| Onderdeel | Specificatie |
|---|---|
| Lasergolflengte | 905nm |
| Bereik | 40m bij 10% reflectiviteit, 70m bij 80% reflectiviteit |
| Minimaal detectiegebied | 0,1m |
| Gezichtsveld | Horizontaal: 360°, Verticaal: -7° tot 52° |
| Puntenwolk-uitvoer | 200.000 punten/seconde |
| Puntenpercentage | 10Hz |
| Beschermingsniveau | IP67 |
| Stroom | 6,5 W (omgeving van 25 °C) |
| Spanningsbereik | 9–27V gelijkstroom |
| Afmetingen | 65 × 65 × 60mm |
| Gewicht | 265 gram |
Dieptecamera
| Onderdeel | Specificatie |
|---|---|
| Dieptetechnologie | Dubbele infrarood |
| Diepte kijkhoek | 87° × 58° (Horizontaal × Verticaal) |
| Diepte resolutie | 1280 × 720 |
| Diepte nauwkeurigheid | <2% binnen 2m |
| Diepte Framesnelheid | 90 fps |
| Dieptebereik | 0,3–3m |
| Afmetingen | 90 × 25 × 25mm |
| Bedrijfsomgeving | Binnen/Buiten |
Camera met één lens
| Onderdeel | Specificatie |
|---|---|
| Maximale resolutie | 2MP (1920 × 1080) |
| Maximale framesnelheid | 30 fps |
| Gezichtsveld | ~90° |
| Kabellengte | ~1.5m |
| Afmetingen | 35 × 35 × 30mm |
Functietabel
| zalving | Basisconfiguratie | Optioneel D435 | Optionele D435 + 4G-module |
|---|---|---|---|
| Hoogte behouden, zweven, terugkeren naar huis | ✔ | ✔ | ✔ |
| Landing, stabilisatie, waypointvlucht | ✔ | ✔ | ✔ |
| Vlucht op afstand | ✔ | ✔ | ✔ |
| Communicatie tussen vluchtcontroller en boordcomputer | ✔ | ✔ | ✔ |
| QR-codeherkenning en landing | ✔ | ✔ | ✔ |
| Objectherkenning en -dropping | ✔ | ✔ | ✔ |
| Gelijktijdige kartering en obstakelvermijding | ✔ | ✔ | ✔ |
| 3D LiDAR-mapping en positionering | ✔ | ✔ | ✔ |
| YOLO-gebaseerde objectherkenning | ✘ | ✔ | ✔ |
| Objectherkenning en -tracking | ✘ | ✔ | ✔ |
| 4G-afstandsbediening | ✘ | ✘ | ✔ |
Pakket omvat
Basisconfiguratie
- Kader: F290 koolstofvezelframe
- Motoren: 4× T-motor F100 Kv1100
- ESC: 4× FlyFun T-rex 5 45A
- Schroeven: 4× 7-inch driebladige propellers
- Vluchtcontroller:Pixhawk6mini
- Batterij: 6S Standaardbatterij 6000mAh
- Oplader: 6S Batterijlader
- Boordcomputer: Jetson Orin Nano 8G + WIFI-module
- SSD: 256G
- LiDAR: Livox MID360
- Camera: 150° groothoek USB-camera
- Afstandsbediening: Cloud T10 (inclusief gegevensontvanger)
Optionele configuratie: D435
Bevat alle componenten van de Basisconfiguratie, plus:
- Camera met dubbele lens:D435
Optionele configuratie: D435 + 4G-module
Bevat alle componenten van de Basis Configuratie, plus:
- Camera met dubbele lens:D435
- 4G-module
Details
S2-F290 programmeerbare drone
- ✔ Technische ondersteuning, probleemloze aftersales-service
- ✔ Biedt voorbeelden van concurrentie, aanpasbaar
- ✔ Chinees/Engels mobiel grondstation
- ✔ Hoge stabiliteit, hoge prestaties
- ✔ Binnen/Buiten
De S2-F290 is een geavanceerde drone die speciaal is ontworpen voor drone-races en die zich specialiseert in verkenning en innovatie.Het toestel is ontworpen om geavanceerde technologie en onbeperkte creativiteit te integreren en kan zich aanpassen aan uiteenlopende complexe omgevingen, waardoor luchtverkenning toegankelijker en effectiever wordt.
Deze drone heeft een compact ontwerp met immense kracht. Het biedt een schat aan competitievoorbeelden, waardoor gebruikers de prestaties snel onder de knie kunnen krijgen en optimaliseren. Uitgerust met een speciaal Chinees/Engels mobiel grondstation, verbetert het het gemak van dronebediening aanzienlijk. Bovendien biedt het competitieve broncode-uitleg en aanpasbaarheid om ervoor te zorgen dat gebruikers hun gewenste functionaliteiten in de kortst mogelijke tijd kunnen bereiken en tegelijkertijd kunnen uitblinken in competitieve scenario's.

Voldoen aan de behoeften voor ontwikkeling / concurrentie / onderzoek
| Categorie | Details |
|---|---|
| ROS Basiskennis | - Afstandsbediening |
| - Communicatie tussen vluchtcontroller en boordcomputer | |
| Basisfuncties | - Routeplanning |
| - QR-codeherkenning en -positionering | |
| - Autonome patrouille buiten boord | |
| Geavanceerde functies | - QR-codeherkenning voor landing |
| - Objectherkenning en -verwijdering | |
| - Gelijktijdige kartering en obstakelvermijding | |
| - 3D LiDAR-mapping en positionering | |
| - YOLO-gebaseerde objectherkenning | |
| - Webgebaseerde videotransmissie | |
| - Buiten formatie vliegen | |
| - Land-lucht samenwerkingsformatie | |
| Optionele D435-camerafuncties | - VINS Visuele Positionering |
| - YOLO-gebaseerde objectherkenning en -tracking | |
| Optionele 4G-communicatiefuncties | - 4G-afstandsbediening |
Autonome obstakelvermijding, uitgebreide veiligheidsgarantie
Met behulp van 3D LiDAR voor autonome obstakelvermijding combineert de drone wereldwijde routeplanning met lokale dynamische obstakelvermijding om obstakels uit alle richtingen nauwkeurig te detecteren. Het ondersteunt automatisch stoppen en continue vlucht, waardoor flexibele vermijding van objecten langs het vliegpad mogelijk is, wat zorgt voor een veiligere vliegervaring.

QR-codeherkenning en landing
De drone activeert de camera en QR-codeherkenningsmodule om de realtime positie-informatie van de QR-code te verkrijgen. Tijdens de afdaling past de drone zijn positie dynamisch aan, wat zorgt voor een nauwkeurige uitlijning met het gezichtsveld van de camera voordat hij landt.
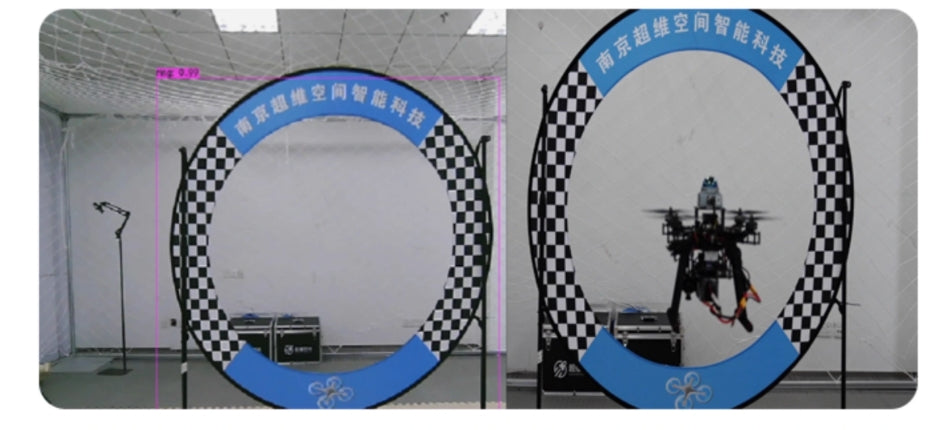
YOLO-objectherkenning
De drone gebruikt YOLOv8 voor objectherkenning, waarbij de positie-informatie van het cirkelvormige frame in realtime wordt verkregen. Hij past zijn positie autonoom aan en navigeert door het cirkelvormige frame.
Buiten formatie vliegen
De drone maakt gebruik van zwermformatietechnologie, waardoor meerdere drones gecoördineerd kunnen worden aangestuurd om formatievluchten uit te voeren.Door gebruik te maken van geavanceerde communicatie- en samenwerkingsalgoritmen, wordt realtimecommunicatie en informatie-uitwisseling tussen drones mogelijk gemaakt, waarbij hun bewegingen en posities worden gesynchroniseerd om een strakke formatie te vormen.

Land-lucht samenwerkingsformatie
Dit platform ondersteunt collaboratieve formatie tussen land- en luchtdrones. Door gebruik te maken van een lokaal netwerk met topologiestructuren voor apparaatinterconnectiviteit, gebruikt het UDP-communicatie en aangepaste protocollen om snelle en stabiele communicatie te garanderen. Met PID-regeling bereikt het gesynchroniseerde opvolging tussen de hoofddrone en meerdere slave-drones, wat zorgt voor formatiestabiliteit en operationele efficiëntie.

Voorbeeld van een wedstrijd
Biedt exclusieve wedstrijdscenario's met stapsgewijze begeleiding, zodat deelnemers zich eenvoudig kunnen aanpassen aan verschillende soorten wedstrijden.



Kenmerken van de programmeerbare drone S2-F290
Hoge kosten-prestatieverhouding
- Ontworpen voor beginners om de leercurve te verkorten en het gemakkelijker te maken om de drone onder de knie te krijgen.
- De prijs is betaalbaar, waardoor het de ideale drone is voor studenten en liefhebbers.
Hoge stabiliteit
- Getest onder verschillende extreme omstandigheden gedurende drie jaar.
- Uitgerust met een 3 mm dik carbonvezelframe voor verbeterde duurzaamheid en stabiliteit.
- Hiermee kunnen gebruikers erkenning krijgen bij hun eerste wedstrijdervaring.
Uitbreidbaarheid
- Ondersteunt geavanceerde aanpassingen voor uiteenlopende toepassingen.
- Compatibel met diverse uitbreidingscomponenten om de prestaties en functionaliteit van de drone voortdurend te verbeteren.
Zorgeloze aftersales-service
- Een professioneel team dat uitgebreide begeleiding en ondersteuning biedt.
- Biedt gratis reparaties voor hardwareschade die is veroorzaakt door bedieningsfouten tijdens de garantieperiode (met uitzondering van accessoires en batterijen).
Aanpasbaar
- Biedt ondersteuning voor exclusieve ontwikkeling in ROS en QGC.
- Ondersteunt een hoge nauwkeurigheid van meer dan 98% voor kaarten en navigatie.
- Compatibel met RTK/GPS-modules, logo's en diverse unieke functionaliteiten.

Configuratie van het grondstation
Pixhawk 2.4.8 Flight Controller gebruiken
Deze vluchtcontroller is uitgerust met de nieuwste standaard 32-bits STM32F427-processor en de MS5611-barometer en biedt een groot aantal interfaces en een hoge prijs-prestatieverhouding als open-sourceoptie.
1. Exclusief, zeer op maat gemaakt QGC-grondstation
- Bereikt meer dan 98% lokalisatie in het Chinees.
- Ondersteunt geavanceerde functies zoals NTRIP.
2. Mobiel QGC-grondstation
- Biedt een mobiele versie van het QGC-grondstation, waarmee u het probleemloos kunt bedienen vanaf een smartphone.
3. Wi-Fi of 4G directe verbinding
- Maak eenvoudig verbinding via wifi en bedien het apparaat met een smartphone of computer.
- Opmerking: Het "ezuav"-systeem geeft aan dat er verbinding is met het apparaat, maar biedt geen internettoegang.

Uitgebreide tutorials en volledig open-source bronnen
- Zeer gedetailleerde gebruikshandleidingen die alle aspecten van de functionaliteit van de S2-F290-drone belichten.
- Volledig open-source materialen, waaronder:
- Software-introducties en installatiehandleidingen.
- Tutorials voor basis- en geavanceerde functies, zoals OpenCV-gebaseerde objectherkenning, 3D-mapping en autonoom vliegen buiten het vliegtuig.
- Instructies voor aangepaste ontwikkeling voor PX4- en MAVLink-communicatie.
- Veelgestelde vragen over probleemoplossing, configuratie van de ROS-omgeving en operationele stappen.
Related Collections


