STM32 Open Source Quadcopter DIY Kit - Laser optische stroom Student Learning Board PCB + PID Parameter Debugging Rack
STM32 Open Source Quadcopter DIY Kit - Laser optische stroom Student Learning Board PCB + PID Parameter Debugging Rack
RCDrone
Kan beschikbaarheid voor afhalen niet laden
Overzicht
De STM32 doe-het-zelf Open Source Quadcopter-kit is een uitgebreide oplossing voor studenten, hobbyisten en ontwikkelaars die praktische ervaring willen opdoen in drone programmering, vluchtdynamiek en hardwareontwikkeling. Met een STM32F103C8T6-microcontroller, MPU6050 6-assige gyroscoop, En NRF24L01 draadloze module, deze quadcopter is uitgerust met geavanceerde technologieën voor een soepele en stabiele vlucht. optische stroomstabilisatie gecombineerd met barometrische druksensoren zorgt voor een nauwkeurige hoogtevasthouding en positievergrendeling, terwijl de open-source C-firmware stelt gebruikers in staat om vluchtalgoritmen te wijzigen. Met aanpasbare IO-poorten, draadloze PID-parameterafstemmingen ondersteuning voor secundaire ontwikkeling met behulp van Keil MDK5, biedt deze quadcopter ongeëvenaarde veelzijdigheid voor zowel beginners als gevorderde gebruikers. Een krachtige 3,7V 1200mAh-batterij zorgt voor een vliegtijd tot 10 minuten en het lichte gewicht Kader van 320 mm x 230 mm is ontworpen voor stabiliteit en draagbaarheid. Het meegeleverde PID-debuggingrek verbetert de leerervaring verder, waardoor deze kit ideaal is voor educatieve projecten, wedstrijden en drone-enthousiastelingen.
Belangrijkste kenmerken
-
Precisie van de vluchtbesturing:
- Uitgerust met STM32F103C8T6-microcontroller En MPU6050-gyroscoop voor betrouwbare vluchtdynamiek.
- Optische stroommodule (PMW3901) En barometrische sensor (SPL06-001) zorgen voor een nauwkeurige positiebepaling en hoogtestabilisatie (20 cm - 400 cm).
-
Open Source & Programmeerbaarheid:
- Volledig open-source firmware geschreven in standaard C voor een gemakkelijke secundaire ontwikkeling.
- Compatibel met Keil MDK5 omgeving voor geavanceerde programmeerprojecten.
-
Draadloze bediening:
- Beschikt over een NRF24L01 draadloze module ondersteuning van een controleafstand van 50m+ in open omgevingen.
- Draadloze PID-parameteraanpassing voor X-, Y-, Z-assen vereenvoudigt vluchtoptimalisatie.
-
Robuust hardwareontwerp:
- Duurzaam frame met 8520 borstelmotoren En 13,5 cm propellers voor stabiele binnen- en buitenvluchten.
- Lichtgewicht ontwerp (100g inclusief batterij) ondersteunt payloads tot 60 gramwaardoor het geschikt is voor het toevoegen van sensoren of camera's.
-
Verbeterde leermiddelen:
- Bevat een PID-foutopsporingsrek voor het nauwkeurig afstellen van PID-parameters.
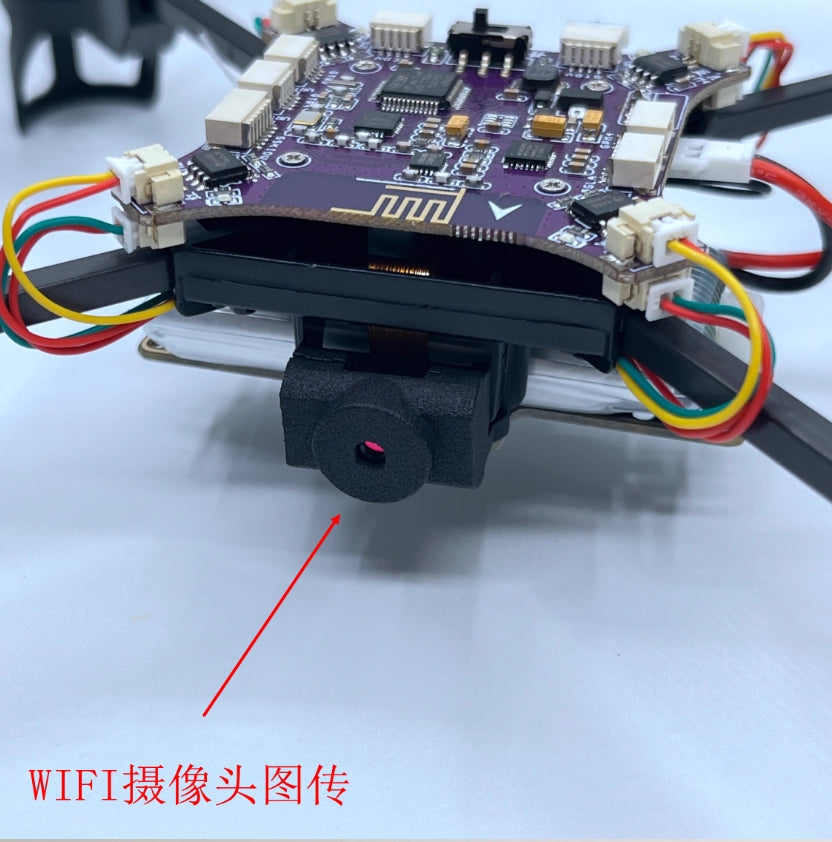
- Vooraf gesoldeerde IO-poorten ondersteunen uitbreidingen zoals Wi-Fi-camera-interfaces, SPI, UART, En IIC-modules.
-
Krachtig batterijsysteem:
- Inclusief 3,7V 380mAh En 3,7V 1200mAh-batterijen, met vluchttijden van 5 tot 10 minuten afhankelijk van de lading en de omstandigheden.
- Ingebouwde beveiliging tegen overladen en ontladen zorgt voor de veiligheid van de batterij.
-
Plug-and-Play-verbinding:
- USB HID-aansluiting voor realtime gegevensoverdracht en parameteraanpassingen via computerinterface.
- Gebruiksvriendelijke SWD-programmeerinterface die zowel J-Link En ST-Link foutopsporingsprogramma's.
Technische specificaties
Quadcopter
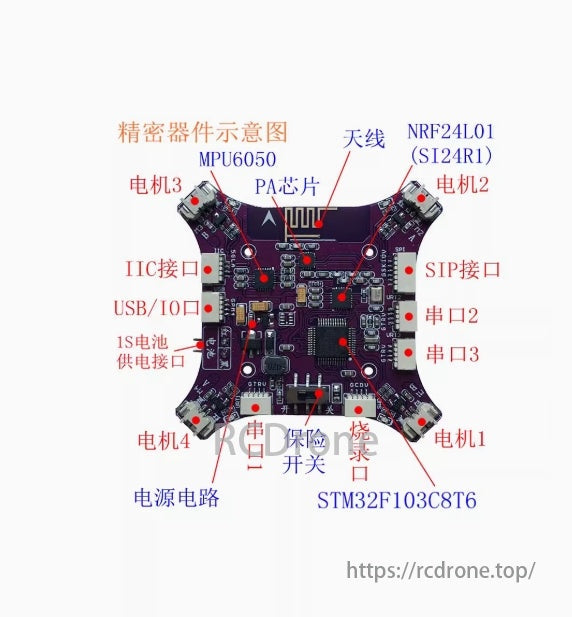
- Hoofdchip: STM32F103C8T6
- Gyroscoop: MPU6050 (6-assig)
- Draadloze module: NRF24L01 (SI24R1)
- Motorbestuurder: AO3400 (A09T)
- Motoren: 8520 borstelmotoren
- Schroeven: 13,5 cm (4 inbegrepen)
- Sensoren: SPL06-001 (barometer), PMW3901 (optische stroom)
- Batterij: 3,7V 1200mAh (10 minuten vliegen) + 3,7V 380mAh (5 minuten vliegen)
- Gewicht: 100g (inclusief batterij)
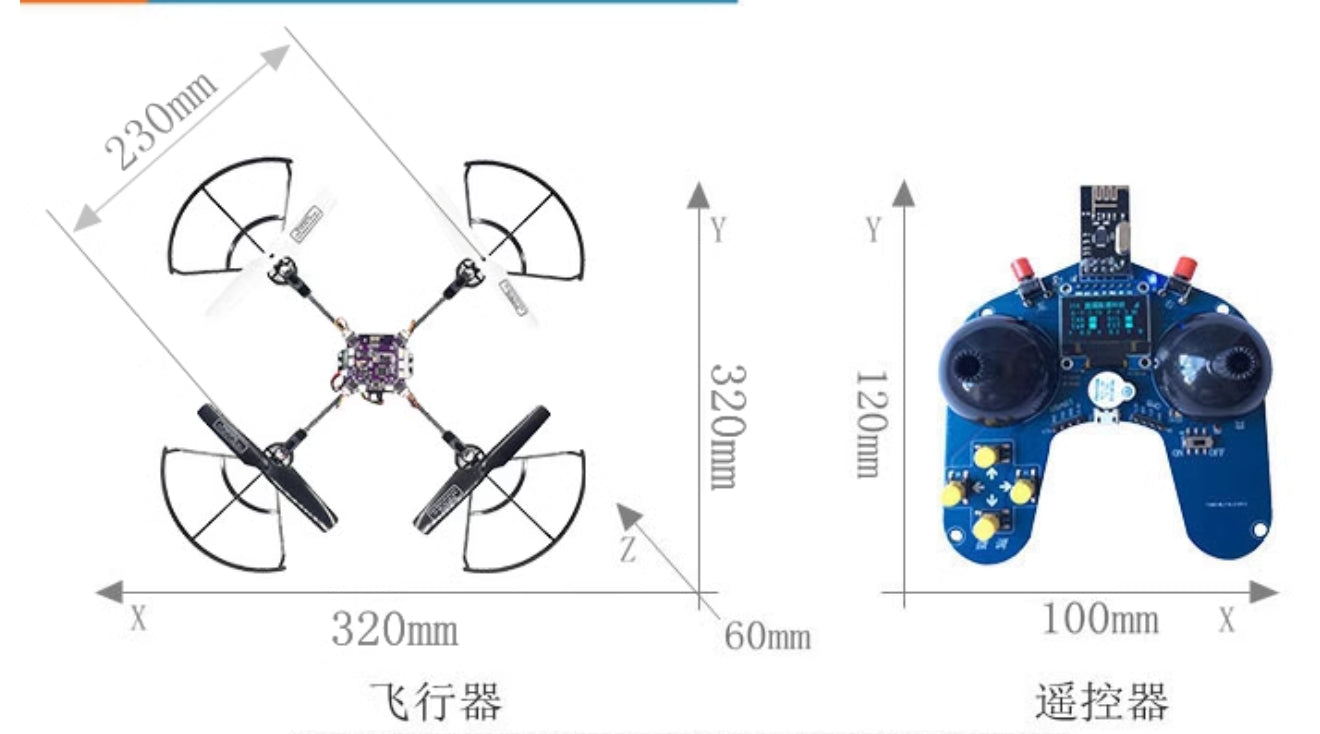
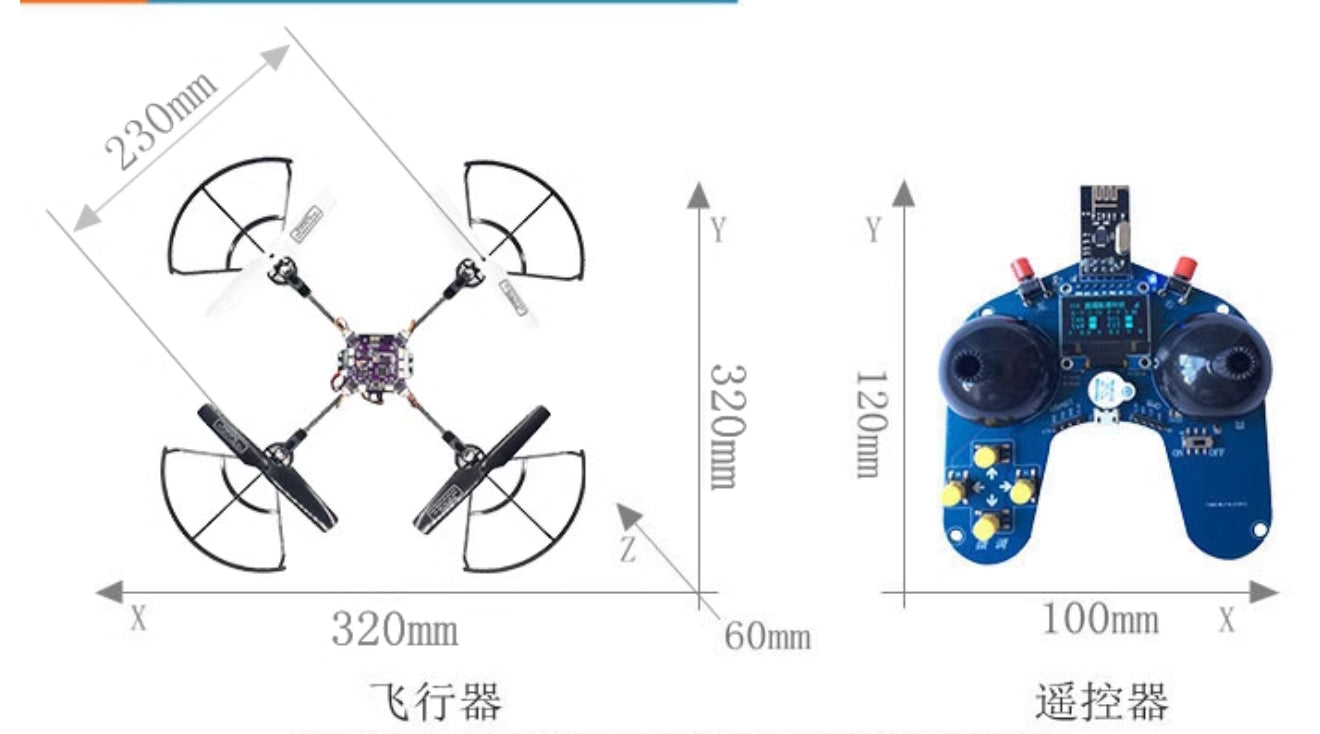
- Framemaat: 320mm x 230mm
- Extra poorten: SPI x1, UART x2, IIC x1, USB IO x1
- Laadvermogen: 60 gram
Afstandsbediening
- Hoofdchip: STM32F103C8T6
- Draadloze module: NRF24L01 (SI24R1)
- Weergave: 0,96-inch OLED-scherm
- Stroom: 3,7V 380mAh-batterij
- Controle afstand: >50m (open veld)
- Maat: 12cm x 10cm
- Gewicht: 60 gram
- Extra functies: Kalibratieknoppen, gevisualiseerde PID-afstemmingsinterface
Inhoud van het pakket
- Quadcopterframe met voorgemonteerde elektronica (STM32F103C8T6-gebaseerde vluchtcontroller, MPU6050, SPL06-001, PMW3901).
- STM32 draadloze afstandsbediening (met OLED-display en NRF24L01-module).
- Batterijen:
- 3,7V 1200mAh lithiumbatterij x1 (10 minuten vliegtijd)
- 3,7V 380mAh lithiumbatterij x1 (vliegtijd van 5 minuten)
- Reserve propellers (4 stuks)
- USB-oplaadkabel (3,7V–4,2V compatibel)
- Jumperdraden (divers)
- Precisie schroevendraaier
- PID-foutopsporingsrek
- Uitgebreide gebruikershandleiding en tutorials (PDF en video).
Extra functies uitgelicht
- Nauwkeurige plaatsing van componenten: Elk gesoldeerd onderdeel is gemarkeerd, inclusief de aansluitingen voor stroom, SPI, IIC, USB en motorconnectoren.
- Modulaire debugtools: De plaatsing van optische stromings- en barometrische sensoren zorgt voor nauwkeurige vluchtgegevens voor PID-aanpassing.
- Uitbreidingen van het ontwikkelbord: Maakt integratie van camera's en sensoren mogelijk voor luchtfotografie en video-opnamen.
- Gevisualiseerde interface: Quadcoptergegevens worden in realtime weergegeven via pc-software voor foutopsporing en optimalisatie.
Toepassingen:
- Educatief gebruik: Ideaal voor STEM-leerprojecten en technische cursussen.
- Competities: Ideaal voor Zelfgemaakte drone uitdagingen en roboticawedstrijden.
- Hobbyisten: Boeiend project voor technologieliefhebbers en makers.
- Geavanceerde ontwikkeling: Ondersteunt secundaire ontwikkeling voor aangepaste applicaties.
Veiligheidswaarschuwing:
Zorg voor veilige testomstandigheden door het meegeleverde debugging-rek te gebruiken. Vermijd vliegen in drukke of gevaarlijke gebieden. Volg de montage-instructies en behandel gesoldeerde componenten met zorg.
Dankzij het modulaire ontwerp, de open-source flexibiliteit en de uitgebreide leermiddelen is de STM32 DIY Open Source Quadcopter Kit uw toegangspoort tot het onder de knie krijgen van dronetechnologie en -programmering.




Dit is een printplaat voor televisiesystemen met een STM3ZF103C8T6F-chip, ontworpen voor hoogwaardige videotransmissie en -ontvangst.


OnF STM32F Blue Pill, 7% i: STM32 Hoge Frequentie BRB+, 10 Ohm x 7 HhJfV: STM32 Afstandsbediening. Scherm: 0,96 Inch OLED IM Et: 2,4C IMHM: ~20°C tot ~60°C JE+HFZ: >50x (Watt), EFt) 7ARh: 12cm x 6cm InLaR: 3,7V, 380mAh, Gewicht: 60g
Related Collections