SU17 Research Drone - PX4 open source industriële drone-ontwikkeling met MID-360 LiDAR, quad-camera SLAM, EGO-Swarm
SU17 Research Drone - PX4 open source industriële drone-ontwikkeling met MID-360 LiDAR, quad-camera SLAM, EGO-Swarm
RCDrone
Kan beschikbaarheid voor afhalen niet laden
Overzicht
De SU17 Research Drone is een krachtige quadcopter met een 6000mAh-batterij, MID-360 LiDAR voor 3D-mapping, quad-camera SLAM-systeem voor nauwkeurige lokalisatie en geïntegreerde GPS+GLONASS-positionering. Met een startgewicht van 2,3 kilo en een laadvermogen van 200 g, het biedt 21 minuten vliegtijd in de visuele positioneringsmodus. Aangedreven door Prometheus-software, ondersteunt het doelherkenning, padplanning en autonome navigatie, waardoor het een industriële kwaliteit oplossing voor onderzoek en innovatie.
Hardwareparameters
Vliegtuig
| Parameter | Beschrijving |
|---|---|
| Vliegtuigtype | Quadcopter |
| Startgewicht (ongeveer) | 2,3 kg (met beschermhoes en batterij) |
| Diagonale afstand | 320mm |
| Afmetingen | Lengte: 442 mm, Breedte: 388 mm, Hoogte: 174 mm (exclusief beschermhoes) |
| Maximale laadcapaciteit | 200 gram |
| Zwevende vluchttijd | Ongeveer 13 min (met hover op 100%, niet lager dan 0%), visuele positionering: 21 min |
| Zweefnauwkeurigheid | GPS: Verticaal ±1,5 m, Horizontaal ±2,0 m |
| 3D LiDAR SLAM: Verticaal ±0,08 m, Horizontaal ±0,08 m | |
| 4-camera visuele SLAM: Verticaal ±0,05 m, Horizontaal ±0,05 m | |
| Windweerstandsniveau | Niveau 4 |
| Bedrijfstemperatuur | -10°C tot 40°C |
| Hoofd MCU-chip | STM32H743 |
| IMU | ICM42688/BMI088 |
| Barometer | MS5611 |
| Kompas | QMC5883L |
| Interface | USB-type-C |
Boordcomputer
| Parameter | Beschrijving |
|---|---|
| Verwerker | Intel Core i5-8365U |
| Geheugencapaciteit | 8GB |
| Geheugenfrequentie | LPDDR3@2133MHz |
| Opslag | 256 GB NVMe-SSD |
| Netwerkpoort | Baidu Apollo Ethernet X2, 12V@3A power-voeding, ondersteunt IEEE 1588-2008 (PTP v2) |
| Seriële poort | TTL seriële poort X2, 5V/3.3V@500mA power aanbod |
| USB | Type-C X2 (1x USB2.0, 1x USB3.0) |
| HDMI | HDMI-poort 1.4 |
Stroombatterij
| Parameter | Beschrijving |
|---|---|
| Model | SU17-L |
| Batterijtype | Hogedruk lithium-polymeerbatterij |
| Nominale spanning | 26,4 V (maximaal), 21 V (minimaal) |
| Opslagspanning | 22,8V (typisch) |
| Nominale capaciteit | 6000mAh |
| Gewicht | 680 gram |
| Afmetingen | Lengte: 85,2 mm, Breedte: 86.5 mm, Hoogte: 135 mm |
Afstandsbediening
| Parameter | Beschrijving |
|---|---|
| Model | QE-2 |
| Kanalen | 8 |
| Transmissievermogen | 18~20 dBm |
| Gewicht | 294,1 gram |
Cardanische ophanging
| Parameter | Beschrijving |
|---|---|
| Regelbare hoek | -90° ~ 30° (kantelas) |
| Streamingprotocol | RTSP (Standaard) |
| Coderingsformaat | H.264 |
| Oplossing | 1080P bij 25 fps |
| Diagonaal gezichtsveld (D) | 120° |
| Verticaal gezichtsveld (V) | 54° |
| Horizontaal gezichtsveld (H) | 95° |
Beeldoverdracht
| Parameter | Beschrijving |
|---|---|
| Werkingsfrequentie | 2,4 GHz |
| Transmissievermogen | 18dBm |
| Communicatiebereik | 3 km (geen hindernissen, geen obstakels) |
| Beeldbereik | 1 km (minimale hinder, geen obstakels) |
| Maximale bandbreedte | 40 Mbps |
Camera met viervoudige diepte
| Parameter | Beschrijving |
|---|---|
| Visieversneller | Intel Movidius Myriad X VPU |
| Maximale resolutie | 1296x816 |
| Maximale framesnelheid | 1280x800 bij 120 fps |
| Sluitertype | Globale sluiter |
| Coderingsformaat | 8/10-bits enkele stream |
| Gezichtsveld | 150° diagonaal gezichtsveld, 127,4° horizontaal gezichtsveld, 79,7° verticaal gezichtsveld |
| Aantal sensoren | 4 (2 voor + 2 achter) |
| IMU | BMI270 |
GNSS
| Parameter | Beschrijving |
|---|---|
| Horizontale nauwkeurigheid | 1,5 m CEP (met SBAS) |
| Snelheidsnauwkeurigheid | 0,05 m/s |
| Bedrijfsmodus | GPS + GLONASS + BDS + GALILEO + SBAS + QZSS |
Oplader
| Parameter | Beschrijving |
|---|---|
| Model | LK150-2640500 |
| AC-ingangsspanning | 100V~240V |
| DC-ingangsspanning | 26.4V |
| Gewicht | 460 gram |
| Laadstroom | 5A |
3D-LiDAR
| Parameter | Beschrijving |
|---|---|
| Model | MIDDEL-360 |
| Lasergolflengte | 905nm |
| Meetbereik | 40 m bij 10% reflectiviteit |
| Gezichtsveld | Horizontaal 360°, Verticaal -7° ~ 52° |
| Minimaal bereik | 0,1 miljoen |
| Puntfrequentie | 10 Hz (typisch) |
| Puntuitvoer | 200.000 punten/s |
| Gegevensinterface | 100 BASE-TX Ethernet |
| Gegevenssynchronisatie | IEEE 1588-2008 (PTP v2), GPS |
| Ingebouwde IMU | ICM40609 |
| Voedingsspanning | 7~27V |
| Afmetingen | 65 mm (B) x 65 mm (D) x 60 mm (H) |
| Gewicht | 115 gram |
| Bedrijfstemperatuur | -20°C ~ 55°C |
Softwareparameters
Boordcomputer
| Parameter | Beschrijving |
|---|---|
| Model | Intel Core i5-8365U |
| Systeem | Ubuntu 20.04 |
| Gebruikersnaam | amov |
| Wachtwoord | amov |
| ROS | noëtisch |
| OpenCV | 4.7.0 |
| Visueel Positioneringssysteem | BSA_SLAM-versie V1 |
Prometheus-software
| Parameter | Beschrijving |
|---|---|
| Versie | v2.0 |
| PrometheusGroundStation-systeem | v1.24.11.27 (Definitieve versie gebaseerd op Wiki release record) |
Details
SU17 Onderzoekseditie
Industrieel hoogwaardige onderzoeksdrone
- Optionele 3D LiDAR: Maakt het mogelijk om obstakels in kaart te brengen, te positioneren en te navigeren.
- Prometheus Autonome Drone Software: Rijk aan demo's voor snelle beheersing van de dronebesturing.
- Industrieel vliegplatform: Stabiel en open, een nieuwe standaard voor de prestaties van onderzoeksdrones.

Belangrijkste kenmerken
Het SU17-onderzoek Drone-ontwikkelingsplatform (aangeduid als SU17) maakt gebruik van een geïntegreerd ontwerp, met vluchtcontrollers, boordcomputers, quad-camera SLAM-modules, cloudcamera's en beeldtransmissiemodules voor integratie op hoog niveau, wat de hardwarestabiliteit en betrouwbaarheid aanzienlijk verbetert. Uitgerust met de autonome dronesoftware Prometheus ondersteunt de SU17 functies zoals doelherkenning, tracking en padplanning voor verschillende vluchtcontrolescenario's.
Het integreert optioneel de MID-360 3D LiDAR, gecombineerd met het FAST-LIO-algoritme om 3D LiDAR SLAM te bereiken, wat nauwkeurige omgevingsdetectie en positioneringsinformatie biedt. Gecombineerd met het EGO-Swarm padplanningsalgoritme, maakt het efficiënte realtime 3D-mapping en obstakelvermijding in complexe omgevingen mogelijk.




Prometheus V2-softwaresysteem
Het ontwikkelingsplatform is gebouwd op het ROS en Prometheus open-source framework, en biedt rijke functionaliteiten en uitgebreide secundaire ontwikkelings-API's voor efficiënte herprogrammering. Het biedt toegang tot positioneringsinformatie, vluchtmodi, batterijstatus, IMU-gegevens en andere dronestatus- en sensorgegevensinterfaces, samen met besturingsinterfaces voor positie, snelheid, versnelling en houding.
Daarnaast bevat het gebruiksvoorbeelden voor gerelateerde API's. Verder beschikt de drone over veiligheidscontrolefuncties voor vluchtuitvoeringen (anti-crash), waardoor automatische afdaling onder abnormale omstandigheden mogelijk is, het risico op crashes wordt verminderd en een veiliger ontwikkelingsproces wordt gegarandeerd.

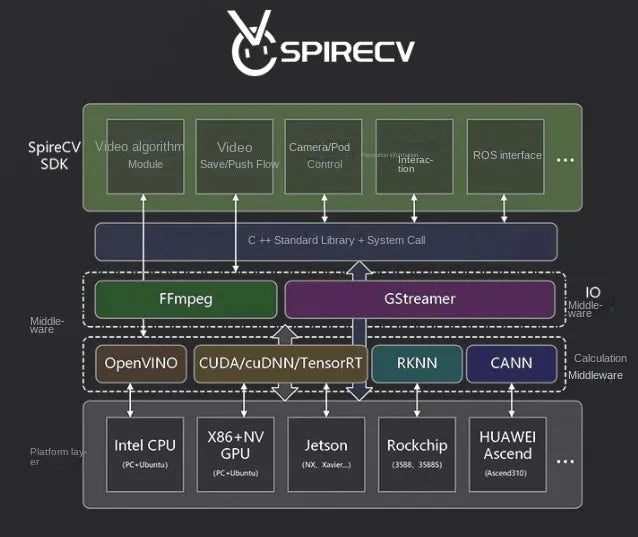
SpireCV Vision-bibliotheek
De SpireCV Vision Library is een real-time image processing SDK die speciaal is ontworpen voor intelligente UAV-systemen. Het biedt functionaliteiten zoals gimbal- en camerabesturing, video-opslag en streaming, doeldetectie, -herkenning en -tracking.
Deze SDK streeft ernaar om hoge prestaties, betrouwbaarheid en een gestroomlijnde interface te bieden voor ontwikkelaars van intelligente UAV-systemen. Met een feature-rijke visuele verwerkingsoplossing stelt het ontwikkelaars in staat om verschillende complexe op visie gebaseerde applicaties efficiënt te implementeren.
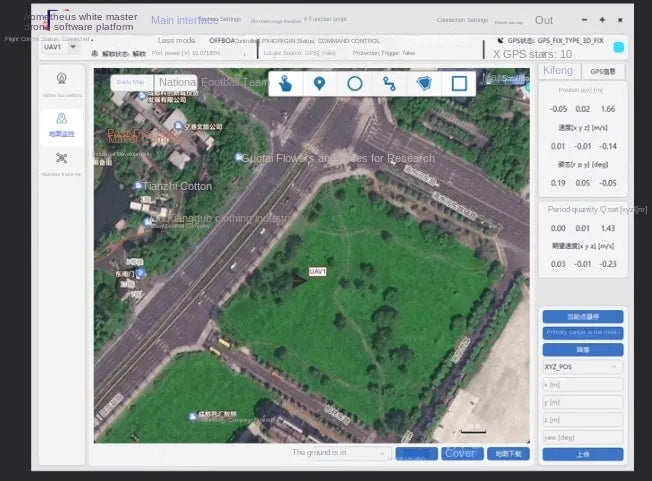
Prometheus Grondstation
Het Prometheus Ground Station is een mens-drone-interactie-interface die is ontwikkeld op basis van het Prometheus-systeem, gebouwd met behulp van Qt-technologie. Het maakt snelle replicatie van de functionaliteiten van het Prometheus-systeem mogelijk, en biedt realtime monitoring en 3D-visualisatie van dronestatus- en besturingsgegevens.
Via het grondstation kunnen gebruikers opdrachten uitvoeren zoals opstijgen met één klik, zweven op de huidige positie, landen en positiecontrole. Daarnaast ondersteunt het systeem aangepaste functieknoppen voor het starten van door de gebruiker gedefinieerde scripts of het verzenden van aangepaste berichten, wat het gemak, de efficiëntie en de schaalbaarheid van gebruikersbewerkingen aanzienlijk verbetert.
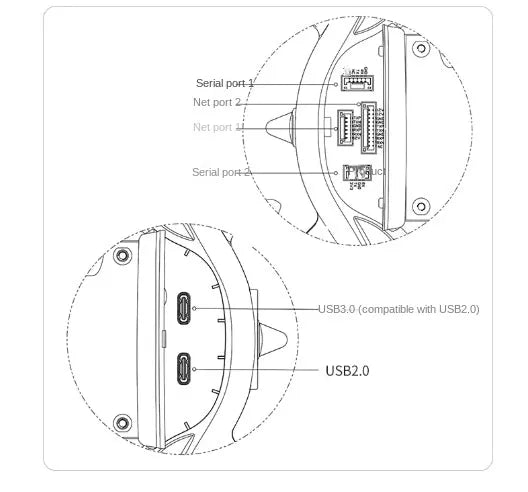
Krachtige uitbreiding
Hardware-uitbreidingspoorten
-
Seriële poort 1
-
Seriële poort 2
-
Netwerkpoort 1
-
Netwerkpoort 2
-
USB-poorten:
- USB 3.0 (compatibel met USB 2.0)
- USB 2.0
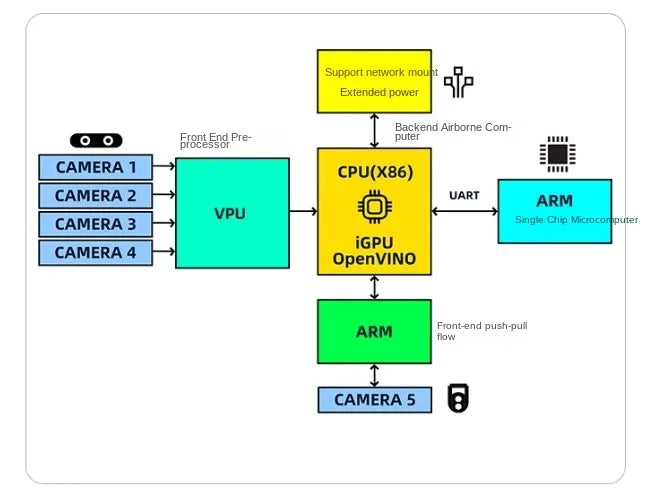
Hardware-framework
De afbeelding illustreert de hardwarearchitectuur van de SU17-drone, waarbij de integratie van verschillende componenten voor geavanceerde gegevensverwerking en systeembesturing wordt benadrukt:
-
Camera's (Camera 1-4):
Verbonden met een VPU (Vision Processing Unit) voor front-end preprocessing. -
VPU:
Verwerkt visuele gegevens van meerdere camera's en stuurt deze door naar de verwerkingseenheden. -
CPU (X86) met iGPU en OpenVINO:
Fungeert als primaire rekeneenheid voor backendverwerking en ondersteunt netwerkverbonden uitbreidingsmogelijkheden voor verbeterde rekenkracht. -
ARM-microcontroller met één chip:
Communiceert met de CPU via een UART-interface voor extra besturingsfunctionaliteiten. -
Front-End Pipelining en Camera 5:
Beheerd door een speciale ARM-processor voor verdere gegevensstroomlijning.
Dit framework integreert meerdere verwerkingseenheden, ondersteunt realtime beeldanalyse, geavanceerde rekentaken en naadloze communicatie tussen hardwarecomponenten. Het zorgt voor efficiënte afhandeling van complexe bewerkingen in onderzoeks- en ontwikkelingstoepassingen.
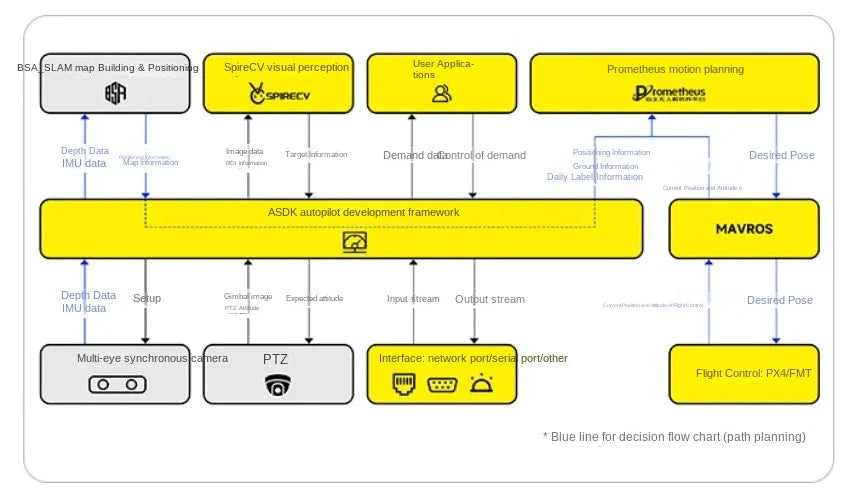
Software-framework
Het diagram illustreert de softwarearchitectuur van de SU17-drone, waarbij de integratie van verschillende systemen voor autonome functionaliteit wordt benadrukt:
-
BSA_SLAM (Mapping en Lokalisatie):
- Biedt ruimtelijke kaart- en positioneringsgegevens.
- Integreert diepte- en IMU-sensoringangen voor nauwkeurige waarneming van de omgeving.
-
SpireCV Visie Perceptie:
- Verwerkt visuele gegevens, waaronder objectdetectie, ROI-informatie en doeltracking.
-
Gebruikerstoepassingen:
- Interfaces voor gebruikersgestuurde taken zoals datavisualisatie en opdrachtinvoer.
-
Prometheus Bewegingsplanning:
- Verwerkt trajectplanning met behulp van positie-, snelheids- en doelgegevens.
-
ASDK Autonoom Rijden Framework:
- Fungeert als centrale verwerkingslaag en beheert de gegevensstroom tussen sensoren, camera's, cloudmodules en externe interfaces.
- Ondersteunt meerdere invoer-/uitvoerkanalen (bijv. netwerkpoorten, seriële poorten).
-
MAVROS:
- Communiceert met vluchtcontrolesystemen (PX4/FMT) voor vluchtstatus- en positiecontrole.
-
Cloudmodule en Multi-Sync-camera's:
- Integreert cloudgebaseerde gegevens voor geavanceerde verwerking.
- Synchroniseert visuele invoer voor uiterst nauwkeurige bewerkingen.
Blauwe lijnen: Geef besluitvormingspaden weer voor trajectplanning.
Deze architectuur laat een modulair, uitbreidbaar ontwerp zien, dat naadloze communicatie tussen verschillende hardware- en softwarecomponenten mogelijk maakt voor een robuuste drone-operatie.
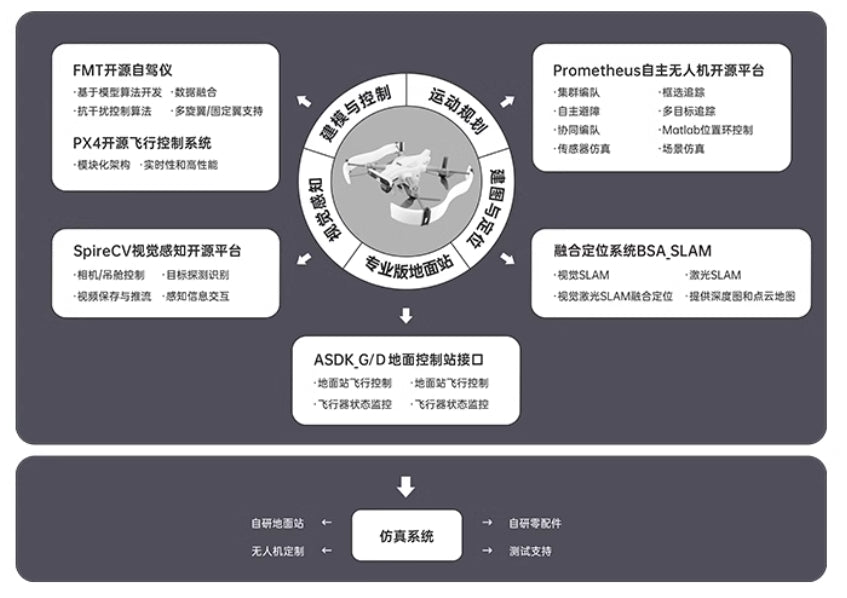
Intelligente openheid: geïntegreerde UAV-systeemoplossing
Het diagram toont een uitgebreide en open architectuur voor dronesystemen, waarbij de nadruk ligt op modulariteit en integratie van verschillende componenten:
-
Kerncomponenten:
- FMT Open-source Autopilot: Biedt betrouwbare vluchtbesturing op basis van modulaire ontwikkeling, ondersteuning voor diverse omgevingen en gegevensintegratie.
- PX4 Vluchtregelsysteem: Zorgt voor stabiliteit en ondersteunt geavanceerde modulaire aanpassingen.
- SpireCV Vision Perception-platform: Richt zich op beeldverwerking, inclusief objectdetectie, tracking en realtime videostreaming.
-
Belangrijkste kaders:
- Prometheus Autonoom UAV-platform: Omvat besturing van meerdere drones, bewegingsplanning, collaboratieve navigatie en simulaties in de echte wereld.
- BSA_SLAM-systeem: Combineert op zicht gebaseerde SLAM en LiDAR-gebaseerde SLAM voor nauwkeurige positionering en kartering.
- ASDK G/D grondstation besturingsinterface: Maakt naadloze communicatie tussen grondstations en UAV's mogelijk voor monitoring en realtime aanpassingen.
-
Workflow-integratie:
- Benadrukt processen zoals bewegingsplanning, omgevingsmapping en autonome navigatie.
- Integratie met professionele grondstations voor trajectcontrole, obstakelvermijding en realtime gegevensbeheer.
-
Simulatieondersteuning:
- Bevat een simulatiesysteem voor autonome missietesten, UAV-besturing en componentvalidatie.
Dit systeem is een geavanceerde oplossing voor de ontwikkeling van autonome UAV's, met schaalbare mogelijkheden voor onderzoek, toepassing en testen in uiteenlopende scenario's.
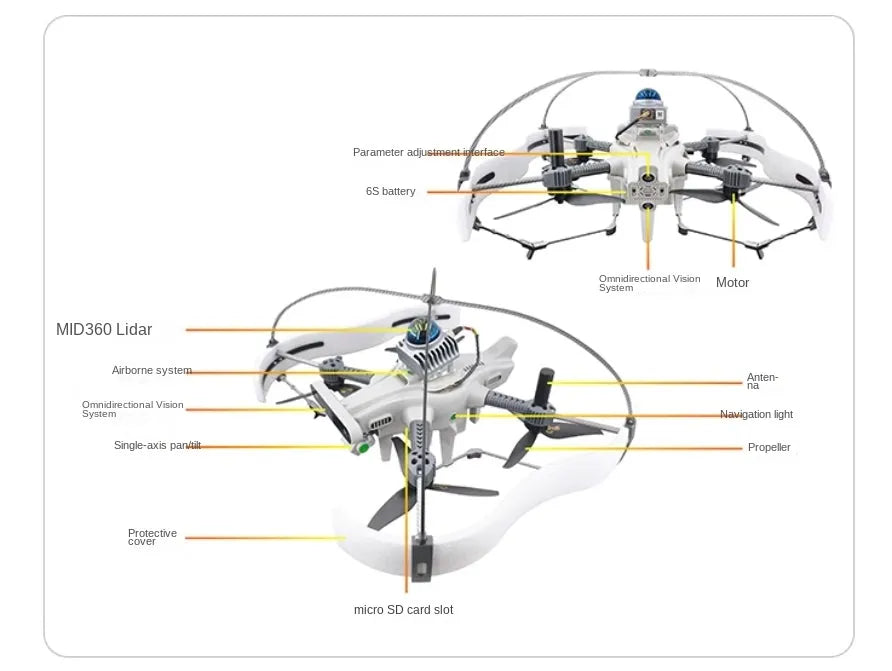
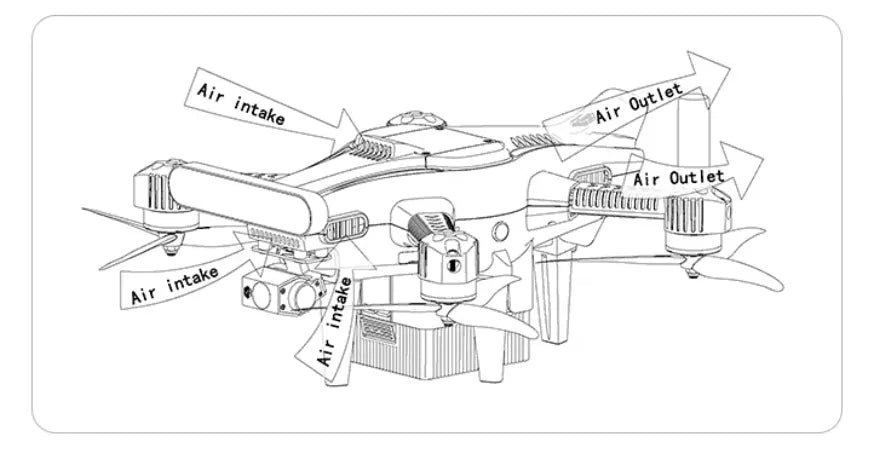
de structurele componenten van de SU17-onderzoeksdrone, met de nadruk op de stabiliteit en het geavanceerde ontwerp. Belangrijke kenmerken zijn onder meer de MID360-LiDAR voor nauwkeurige kartering, een omnidirectioneel visiesysteem voor een alomvattende perceptie van de omgeving, een enkelassige cardanische ophanging voor gestabiliseerde beeldvorming en een robuuste 6S-batterij voor verlengd vermogen. Andere essentiële componenten zijn onder andere de propellersysteem, antenne, navigatieverlichting, en een micro SD-kaartsleuf voor dataopslag. Het ontwerp integreert geavanceerde hardware, wat betrouwbaarheid en hoge prestaties garandeert voor verschillende onderzoeksapplicaties.
Related Collections