








WitMotion HWT601-AGV-485 IMU RS485 Modbus, IP67, 200 Hz – 6-assige versnellingsmeter, gyroscoop, inclinometer, ROS/Matlab
WitMotion HWT601-AGV-485 IMU RS485 Modbus, IP67, 200 Hz – 6-assige versnellingsmeter, gyroscoop, inclinometer, ROS/Matlab
WitMotion
Kan beschikbaarheid voor afhalen niet laden
Overzicht
De WitMotion HWT601-AGV-485 is een 6-assige houding/oriëntatie sensor ontworpen voor AGV-robots, drones en autonome platforms. Het combineert 3-assige versnelling + 3-assige hoeksnelheid en geeft 3-assige hoek &en quaternion uit via RS485 (Modbus) tot maximaal 200 Hz. De module beschikt over Kalman dynamische filtering, hoogprecisie draaitafelkalibratie, automatische/handmatige bias-acquisitie, back-up voeding voor het opslaan van de oriëntatie bij stroomuitval, en een IP67 waterdichte/stofdichte behuizing. Het ondersteunt ook multi-level cascading (tot 32 eenheden) voor gesynchroniseerde houdingmeting.
Belangrijkste Kenmerken
-
Hoogprecisie hoek: XY nauwkeurigheid 0.1°; Z nauwkeurigheid 0.1° (HWT601-AGV-485) / 0.15° (WT601-AGV-485).
-
Stabiele gyroscoop bias: XY 5°/h; Z 2°/h (HWT601-AGV-485) / 5°/h (WT601-AGV-485).
-
Brede invoer 9–36 V, werkstroom ≈ 8 mA @12 V.
-
RS485 Modbus, baud 4.800–230.400 bps.
-
Sampling: aanvraag–antwoord lezen tot 200 Hz.
-
Algoritme: Kalman-filterfusie en speciale AGV koers algoritme.
-
Software: gratis PC-suite met live dashboards, curveplots, 3D-visualisatie (auto/sfeer/box/vliegtuig), configuratie (bias, hoekreferentie, acceleratiekalibratie, schaalfactoren), gegevensregistratie &en directe opslag, en Matlab-import.
-
Ontwikkelaarsvriendelijk: voorbeeldprogramma's en codeondersteuning voor ROS, Linux, C/C#, Python.
-
Milieu: IP67, -40~80 °C (-40~85 °C tafelvariant weergegeven).
-
Cascading: tot 32 sensoren op RS485 voor gelijktijdige houdingmeting.
Installatie-instructies
-
Bevestig de sensor op een strakke, vlakke, stabiele ondergrond; oneffen bases veroorzaken hoekenfouten (zie FIG.1–2).
-
Houd de sensoras parallel aan de gemeten as; vermijd inter-as hoeken (zie FIG.3–4).
-
Dit model ondersteunt alleen horizontale installatie.
html
Software &en Visualisatie
-
Krachtig Gegevensdashboard (hoeken, snelheid, versnelling, magnetisme, quaternion, poorten, temperatuur, spanning, enz.).
-
Configuratiepaneel: baudrate, apparaatsadres, automatische bias-acquisitie, Z-as reset, versnelling calibratie, hoekreferentie, handmatige positieve/negatieve calibratie en schaalfactoren.
-
3D-modellen voor intuïtieve bewegingsmonitoring en real-time curves met dynamische updates.
-
Raw-data weergave en bestand opslaan voor gemakkelijke verzameling; Matlab analyse-import ondersteund.
-
ROS IMU INS demo's: houding tracking visualisatie en houding gegevensweergave (yaw/roll/pitch, hoeksnelheid, lineaire versnelling).
html
Specificaties
Interface &en Prestaties
| Artikel | HWT601-AGV-485 | WT601-AGV-485 |
|---|---|---|
| Interface / Protocol | RS485 / Modbus | RS485 / Modbus |
| Baudrate | 4.800–230.400 bps | 4.800–230.400 bps |
| Uitvoergegevens | 3-assige versnelling, hoeksnelheid, hoek, quaternion | Zelfde |
| Monsterfrequentie | Tot 200 Hz (verzoek–antwoord) | Tot 200 Hz |
| XY hoeknauwkeurigheid | 0.1° | 0. 1° |
| Z hoeknauwkeurigheid (360° rotatiefout) | 0.1° | 0.15° |
| Accel bereik / resolutie | ±4 g / 0.0001 g/LSB | Zelfde |
| Gyro bereik / resolutie | ±250 °/s / 0.0122 (°/s)/LSB | Zelfde |
| Hoek bereik / resolutie | XZ: ±180°; Y: ±90° / 0.0059° | Zelfde |
| Gyro bias instabiliteit (XY / Z) | 5°/h / 2°/h | 5°/h / 5°/h |
| Temperatuurcoëfficiënt (XYZ) | 0.002°/°C | 0.002°/°C |
Elektrisch, Mechanisch &en Omgeving
-
Voedingsspanning: 9–36 V; Bedrijfstroom: ≈ 8 mA (12 V)
-
Afmetingen: 55 × 36.8 × 24 mm; Kabel lengte: 1 m
-
Bescherming: IP67
-
Bedrijfstemperatuur: -40~80 °C (tafelvariant toont ook -40~85 °C)
-
Installatie: Alleen horizontale montage
-
Cascaderen: Tot 32 eenheden op RS485
Toepassingsgebieden
AGV/AMR en mobiele robots, drones/UAV's, onbemande logistieke voertuigen en autonome rijperceptiemodules.
Modelnaam &en selectie
-
HWT601-AGV-485 – hogere Z-as nauwkeurigheid (0.1°) en lagere Z-bias instabiliteit (2°/h).
-
WT601-AGV-485 – standaard Z-as specificaties (0.15°, 5°/h).
Kies HWT601 wanneer de precisie van de Z-richting cruciaal is.
Details

Hoogprecisie 6-assige houding sensor met 3-assige versnelling, hoeksnelheid, hoek en quaternion. Kenmerken AGV koersalgoritme, IP67 bescherming, Kalman filtering, automatische bias acquisitie en ondersteuning voor PC-software.
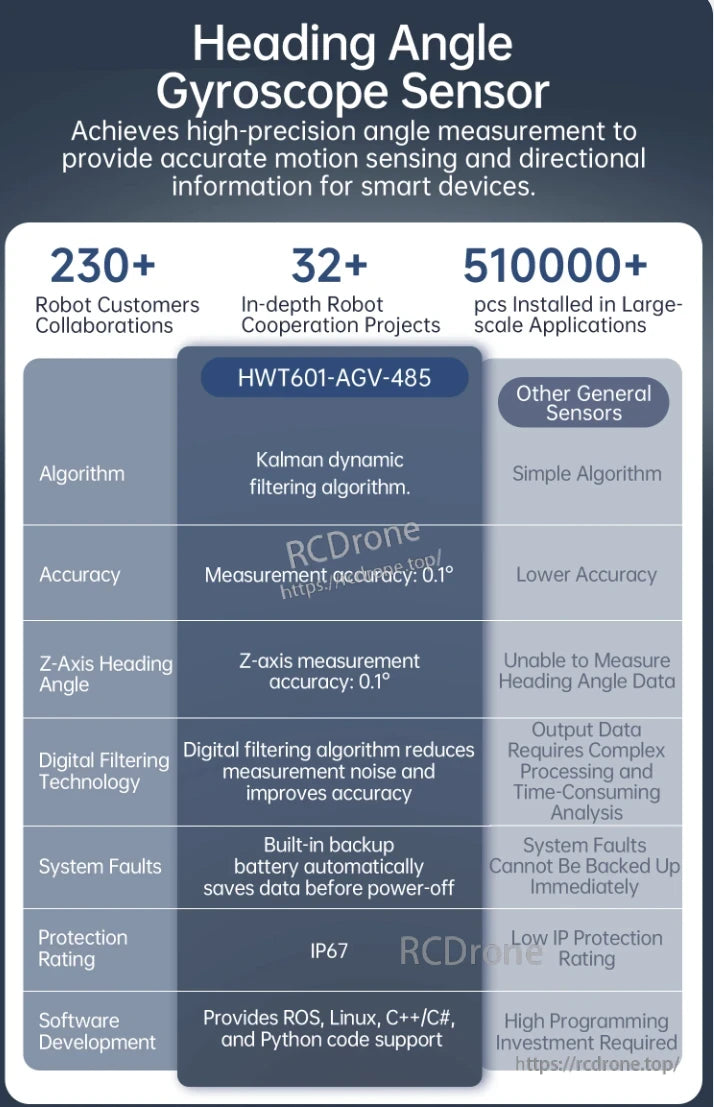
Hoek Gyroscoop Sensor HWT601-AGV-485 biedt hoogprecisie hoekmeting met Kalman filtering, 0.1° nauwkeurigheid, digitale ruisonderdrukking, IP67 bescherming en ondersteunt ROS, Linux, C++ en Python. Meer dan 230 robot samenwerkingen en 510.000+ installaties.
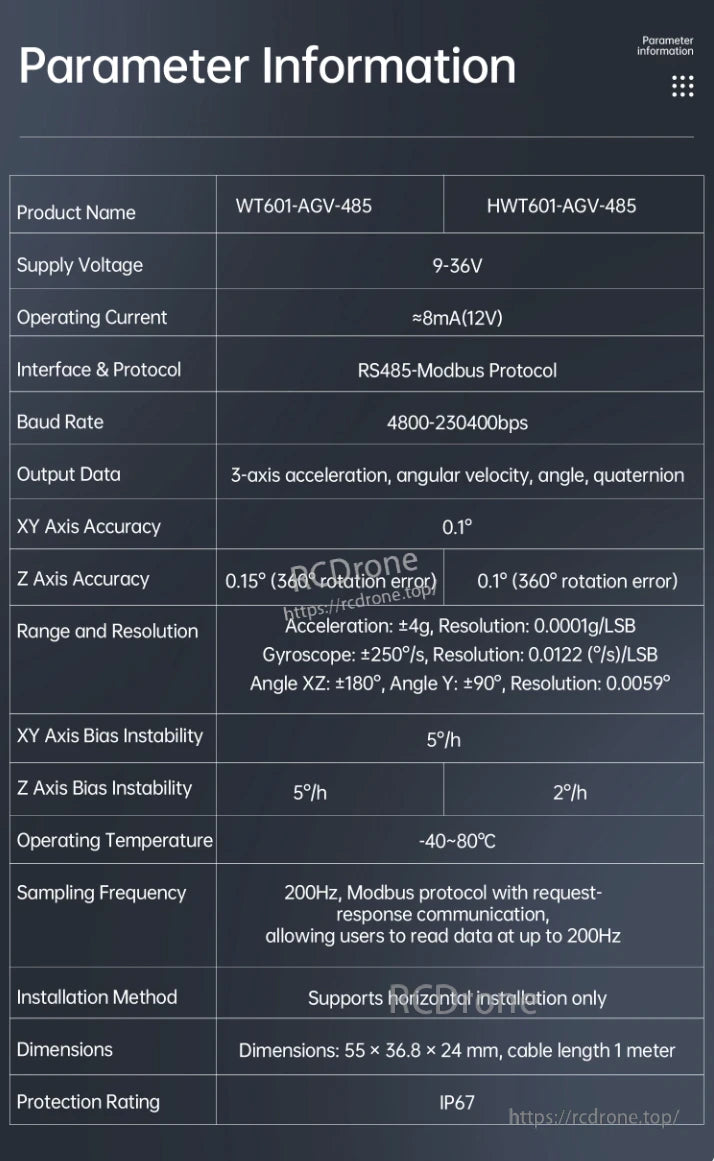
De HWT601-AGV-485 IMU biedt een voeding van 9-36V, RS485-Modbus, 200Hz sampling, ±4g versnelling, ±250°/s gyroscoop, IP67-classificatie, -40~80°C werking. Biedt nauwkeurige, hoge-resolutie 3-assige gegevens.
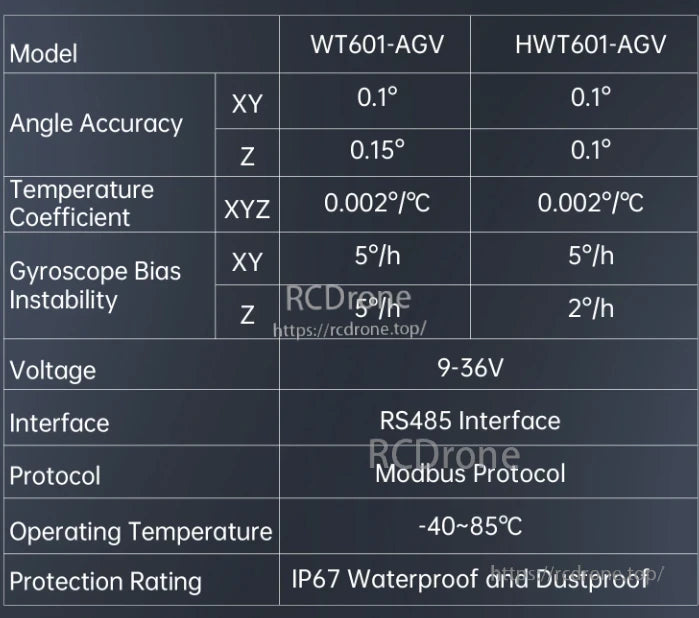
De HWT601-AGV IMU biedt een hoeknauwkeurigheid van 0,1° in de XY- en Z-assen met een temperatuurcoëfficiënt van 0,002°/°C over XYZ. De gyroscoopbiasinstabiliteit is 5°/h (XY) en 2°/h (Z). Het werkt op 9–36V, gebruikt RS485 met Modbus en functioneert van -40 tot 85°C. Met een IP67-classificatie biedt het waterdichte en stofdichte bescherming. De WT601-AGV-variant heeft vergelijkbare specificaties maar 0,15° Z-as nauwkeurigheid en 5°/h Z-as biasinstabiliteit. Beide modellen zorgen voor betrouwbare prestaties in veeleisende omgevingen.
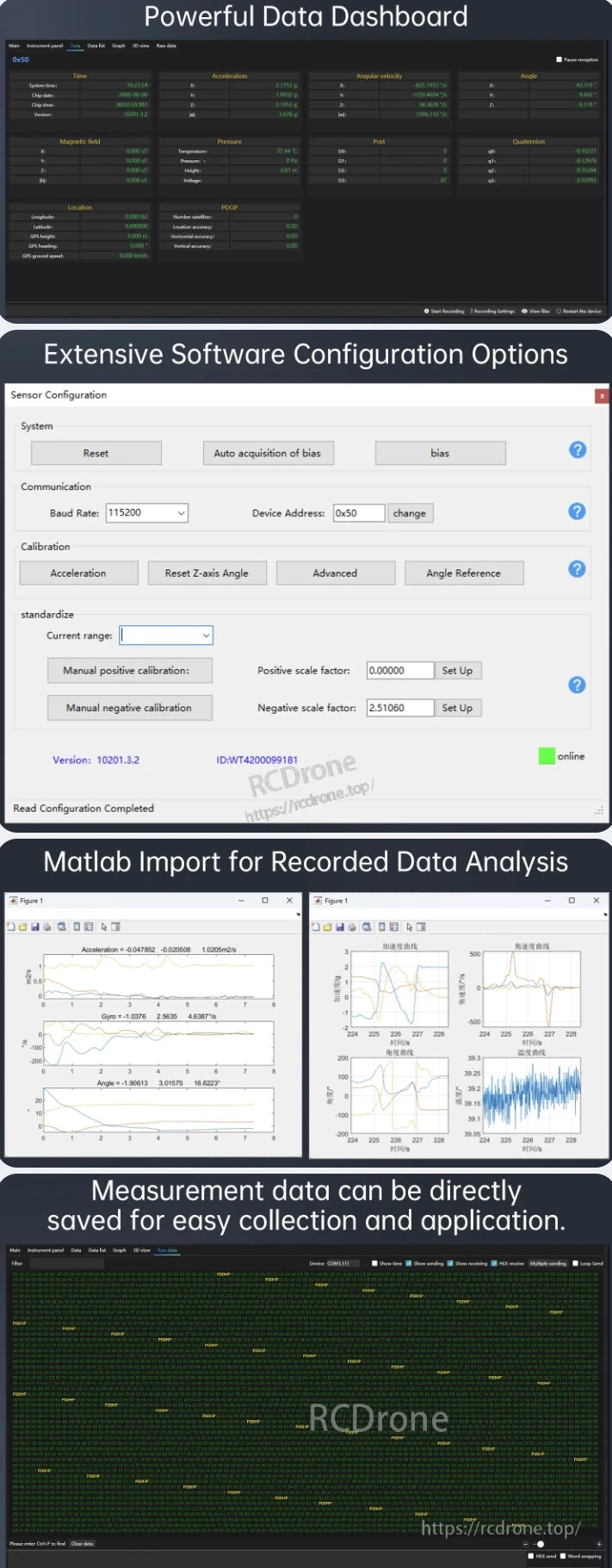
Krachtig datadashboard met realtime sensorlezingen, uitgebreide softwareconfiguratie, MATLAB-import voor analyse en directe gegevensopslag voor gemakkelijke verzameling en toepassing.
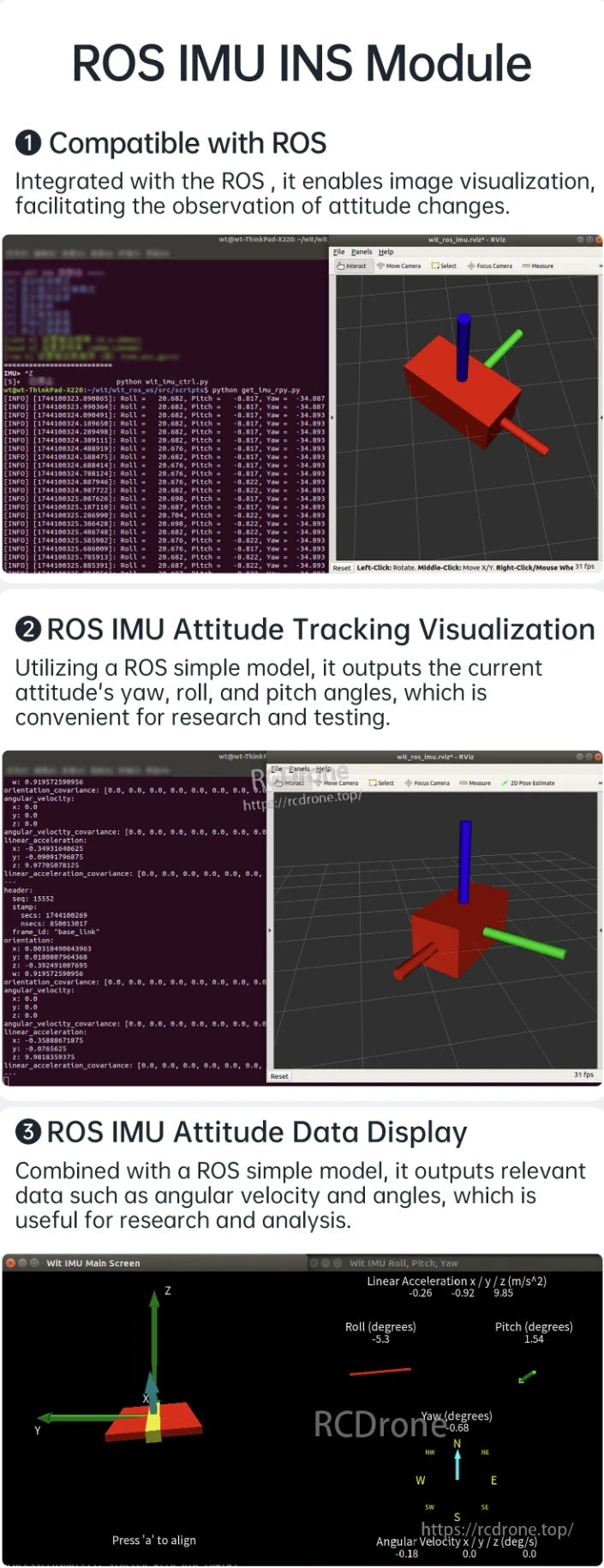
De ROS IMU INS-module biedt ROS-compatibiliteit, visualiseert houdingstracking en toont real-time rol, pitch, yaw, hoeksnelheid en lineaire versnelling voor onderzoek en analyse.
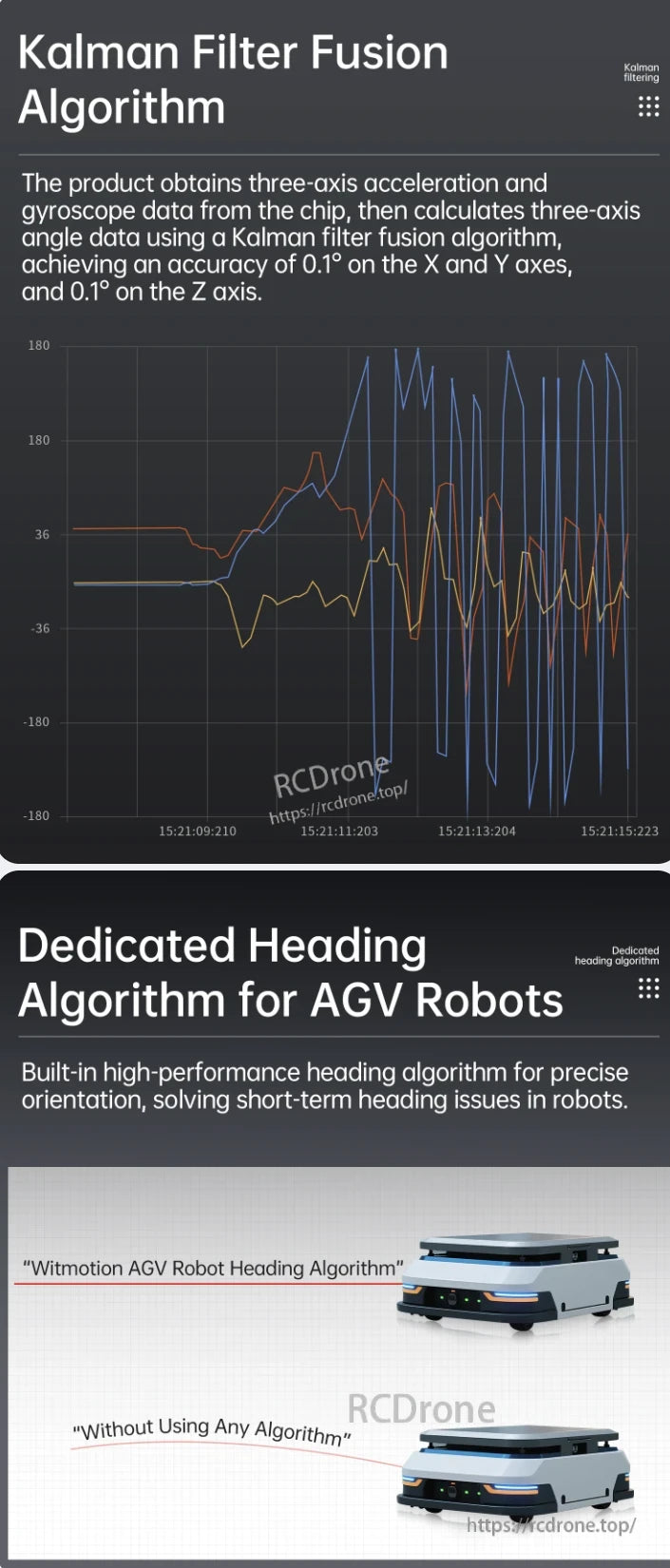
De WitMotion HWT601 AGV IMU levert nauwkeurige 3-assige hoekgegevens met een nauwkeurigheid van 0,1° met behulp van Kalman-filterfusie. Het speciale koersalgoritme zorgt voor een stabiele robotoriëntatie, wat de prestaties aanzienlijk verbetert in vergelijking met systemen zonder dergelijke algoritmen.
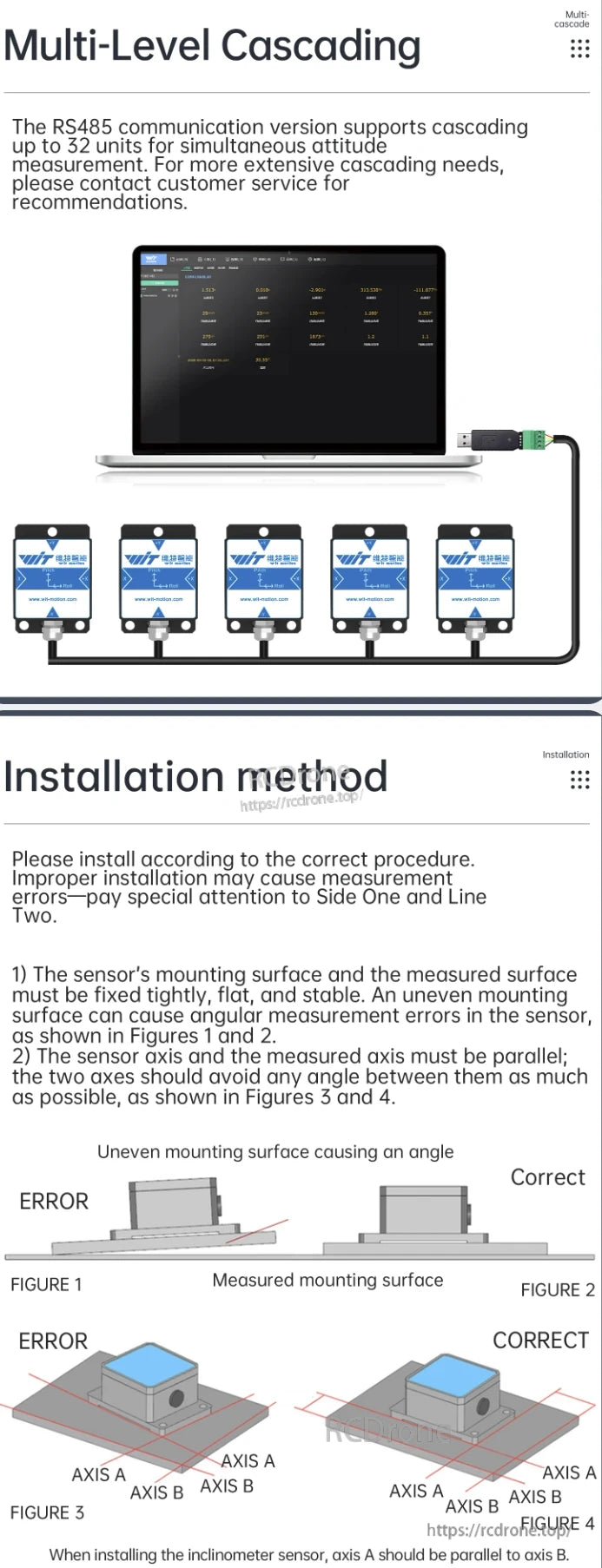
De WitMotion HWT601 AGV IMU ondersteunt tot 32 cascaderende eenheden via RS485 voor houdingmeting. Zorg voor een vlakke, stabiele montage en uitgelijnde assen voor nauwkeurigheid.
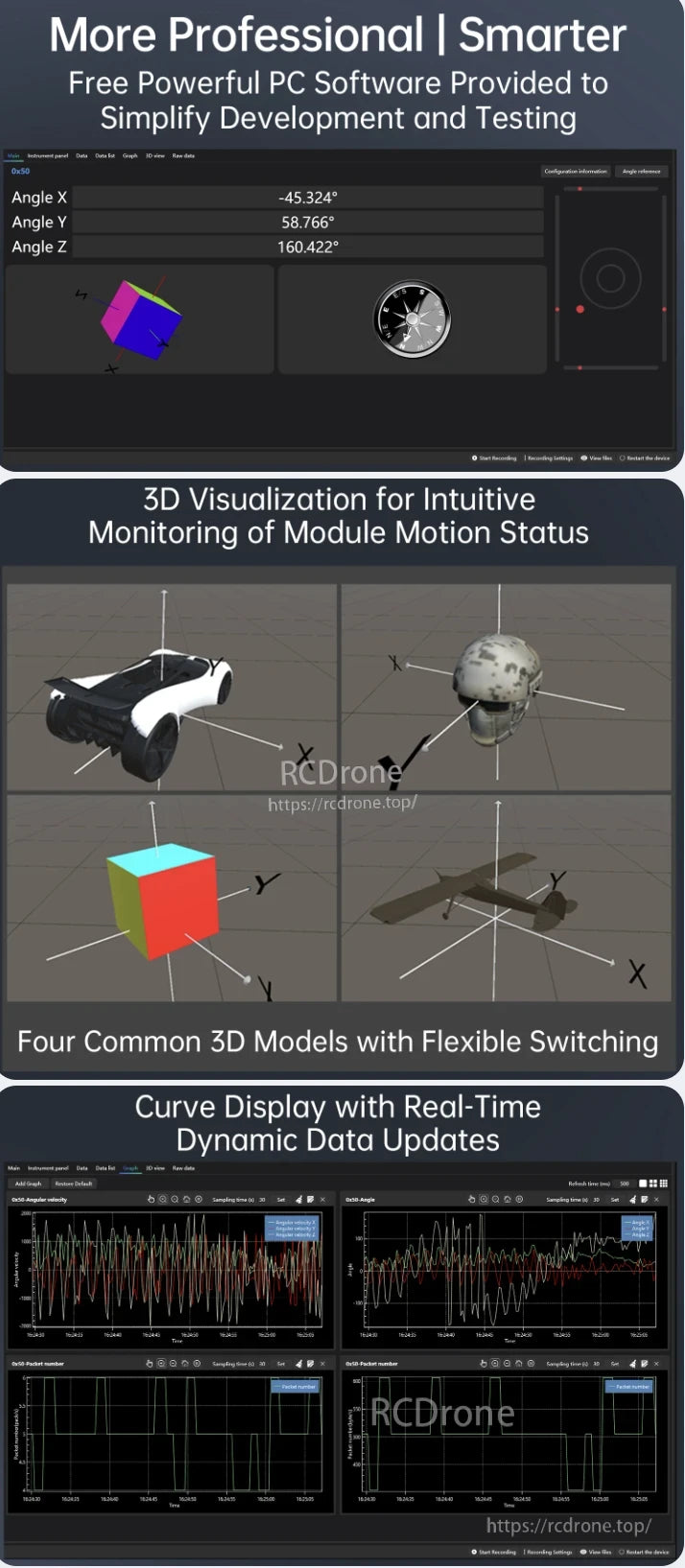
Professionele pc-software voor de WitMotion HWT601 AGV IMU biedt real-time 3D-visualisatie, hoekmonitoring en dynamische curveweergave.Kenmerken zijn onder andere intuïtieve bewegingsdetectie, flexibele modelwisseling en live gegevensupdates voor efficiënte ontwikkeling en testing.
Ondersteunende documentatie omvat voorbeeldprogramma's voor STM32, Arduino, 51 UART, Windows C++ en Matlab om ontwikkelaars te helpen het product toe te passen met behulp van tutorials en codevoorbeelden.
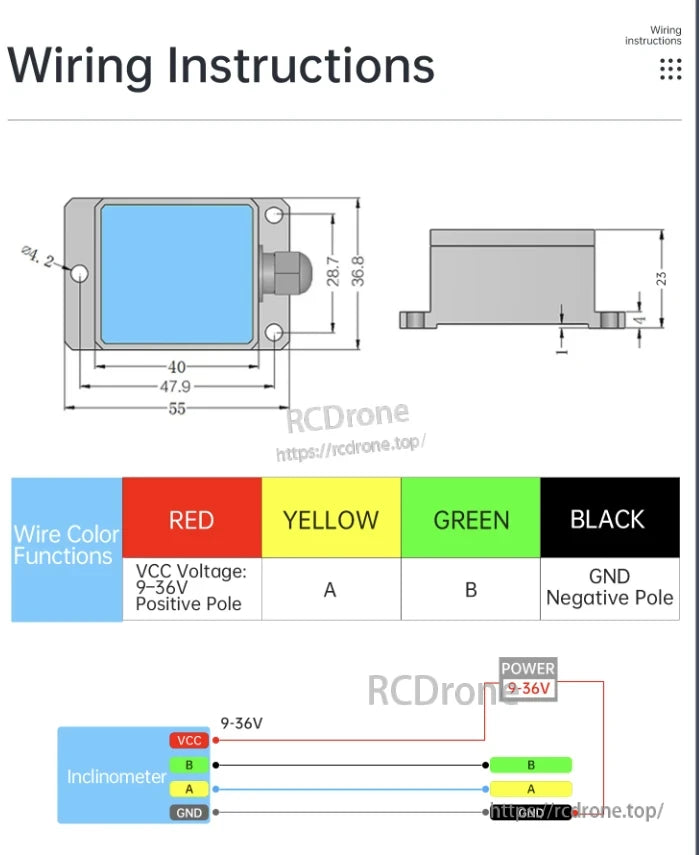
WitMotion HWT601 AGV IMU bedradinggids: rood (9-36V), geel (A), groen (B), zwart (GND). Afmetingen en aansluitdiagram zijn bijgevoegd.

WitMotion HWT601 AGV IMU voor drones, autonoom rijden, mobiele robots en onbemande logistieke voertuigen.
Related Collections








