












WitMotion WT901C-485 9-assige IMU Versnellingsmeter Gyroscoop Digitale Kompas (RS485/RS232/TTL), 0,05° Hoeknauwkeurigheid, 0,2–200 Hz AHRS
WitMotion WT901C-485 9-assige IMU Versnellingsmeter Gyroscoop Digitale Kompas (RS485/RS232/TTL), 0,05° Hoeknauwkeurigheid, 0,2–200 Hz AHRS
RCDrone
Kan beschikbaarheid voor afhalen niet laden
Overzicht
De WitMotion WT901C-485 is een compacte 9-assige AHRS IMU gebaseerd op een triaxiale MPU9250-klasse sensorsuite (versnellingsmeter + gyroscoop + magnetometer) en het fusie/Kalman-algoritme van WitMotion. Het levert hoek-, versnelling-, hoeksnelheid-, magnetisch veld- en quaternion uitgangen met XY statische nauwkeurigheid 0,05° (dynamisch 0,1°) en 0,2–200 Hz instelbare updatefrequentie. Meerdere fysieke interfaces (RS485/RS232 Modbus & TTL UART) en brede ingangsbereiken maken de WT901C-485 eenvoudig te integreren met Arduino/STM32/MCU, pc's en industriële controllers. Officiële Windows-software (MiniIMU.exe) biedt realtime grafieken, 3D-demo, gegevenslogging/export en visuele magnetische kalibratie.
Belangrijkste kenmerken
-
9-assige uitgangen: hoek (Roll/Pitch/Yaw), 3-assige acc/gyro/mag, quaternion.
-
Hoge stabiliteit &en nauwkeurigheid: XY 0,05° statisch, 0,1° dynamisch; acceleratiestabiliteit 0,01 g.
-
Flexibele I/O: TTL / RS232 / RS485 (Modbus); baud 4.800–230.400 (standaard 9.600).
-
Aanpasbare frequentie: 0,2–200 Hz (standaard 10 Hz).
-
Brede voeding: TTL 3,3–5 V, RS232/RS485 5–36 V; <25 mA typisch.
-
Gereedschap &en SDK's: Windows-app, Android-app, CH340/CP2102-stuurprogramma's, voorbeeldcode voor C/C++/STM32/Arduino/Matlab.
-
Magnetische kalibratie &en 3D-demo voor de eerste setup; live grafieken en TXT-export.
-
Industrieel ontwerp: –40~85 °C, 51×36×15 mm, verticale of horizontale montage.
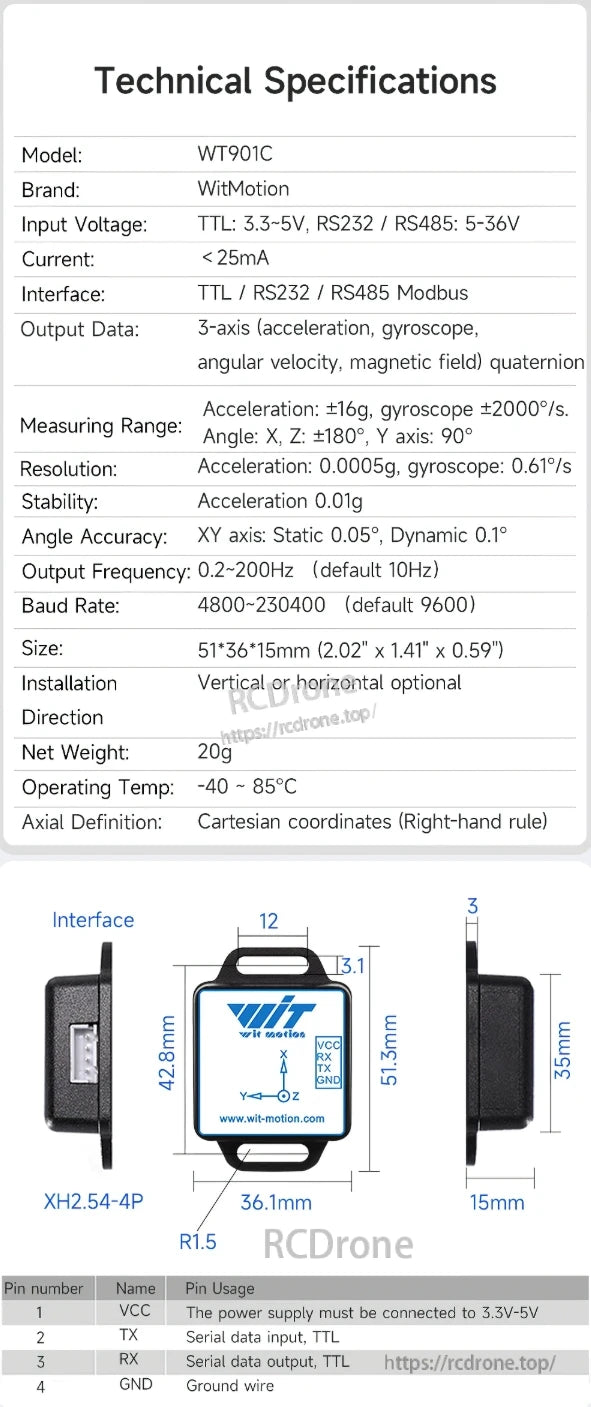
Technische specificaties
| Artikel | Specificatie |
|---|---|
| Model | WT901C (WT901C-485 variant) |
| Interfaces | TTL / RS232 / RS485 (Modbus) |
| Ingangsspanning | TTL: 3.3–5 V; RS232/RS485: 5–36 V |
| Stroom | < 25 mA |
| Uitvoergegevens | Versnelling, hoeksnelheid, magnetisch veld, hoek, quaternion |
| Meetbereiken | Acc ±16 g, Gyro ±2000 °/s; Hoek: X,Z ±180°, Y 90° |
| Resolutie | Acc 0.0005 g, Gyro 0.61 °/s |
| Stabiliteit | Versnelling 0.01 g |
| Hoeknauwkeurigheid | XY statisch 0.05°, dynamisch 0.1° |
| Uitgangsfrequentie | 0.2–200 Hz (standaard 10 Hz) |
| Baudrate | 4.800–230.400 (standaard 9.600) |
| Grootte / gewicht | 51×36×15 mm, 20 g |
| Bedrijfstemperatuur | –40 ~ 85 °C |
| Assen | Cartesiaans, rechterhandregel |
| Installatie | Verticaal of horizontaal |
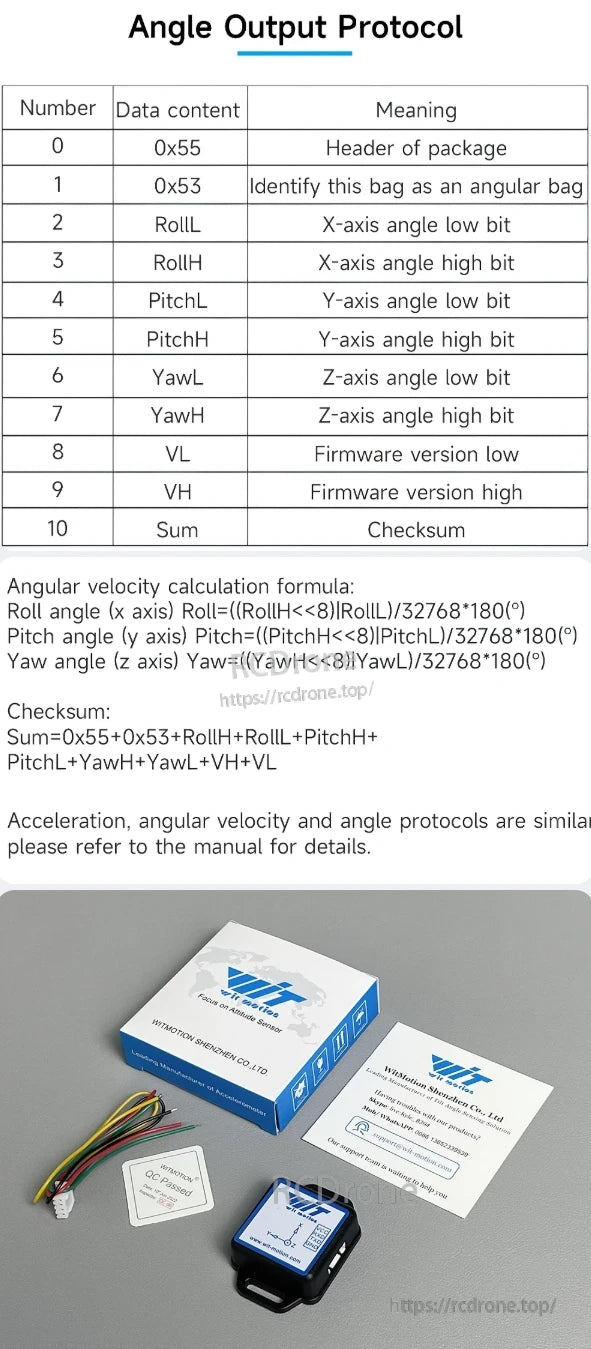
Hoekframe (0x55 0x53) – uitvoerprotocol
| Byte-index | Inhoud | Betekenis |
|---|---|---|
| 0 | 0x55 | Pakketheader |
| 1 | 0x53 | “Hoek” frame ID |
| 2–3 | RollL/RollH | X-as hoek (laag/hoog) |
| 4–5 | PitchL/PitchH | Y-as hoek (laag/hoog) |
| 6–7 | YawL/YawH | Z-as hoek (laag/hoog) |
| 8 | VL | Firmwareversie laag |
| 9 | VH | Firmwareversie hoog |
| 10 | Som | Checksum |
Hoekdecodering
Roll (°) = ((RollH << 8) | RollL) / 32768 × 180
Pitch (°) = ((PitchH << 8) | PitchL) / 32768 × 180
Yaw (°) = ((YawH << 8) | YawL) / 32768 × 180
Checksum
Som = 0x55 + 0x53 + RollL + RollH + PitchL + PitchH + YawL + YawH + VL + VH.
(Acceleratie- en hoeksnelheidsframes volgen dezelfde lay-outstijl—zie handleiding.)
Afmetingen &en Connector
Behuizinggrootte: 51 × 36 × 15 mm (H × B × D), met montagebeugels; gewicht ≈ 20 g.
Connector: XH2.54-4P (bordheader op de sensor).
Pinout (TTL-versie)
| Pin | Naam | Beschrijving |
|---|---|---|
| 1 | VCC | Voedingsinvoer 3.3–5 V |
| 2 | TX | Seriële gegevensinvoer, TTL-niveau |
| 3 | RX | Seriële gegevensuitvoer, TTL-niveau |
| 4 | GND | Aarde |
Opmerkingen: Gebruik TTL-niveaus voor directe MCU-integratie. RS232/RS485-varianten gebruiken hun respectieve spanningsniveaus en bedradingstandaarden.
Software &en tools
-
MiniIMU.exe (Windows): configuratie (algoritme, installatierichting, bereiken, bandbreedte), realtime grafieken, ruwe/hex-weergave, gegevensopname en TXT-export.
-
3D-demo: visualiseer oriëntatie in realtime (bron beschikbaar).
-
Visuele magnetische kalibratie: ellips-pas wizard om bias te verwijderen (aanbevolen voor eerste gebruik).
-
Stuurprogramma's &en code: CH340/CP2102 stuurprogramma's; voorbeelden voor STM32, Arduino, C/C++, Matlab; Android-app; PC/telefoon demo video's.
Typische toepassingen
Automatisering en robotica, nivellering platforms, kantelhoek monitoring, trillingsmonitoring, consumentenelektronica, IoT systeemintegratie, industriële testen, VR/AR-headsets.
Details

Kosteneffectieve AHRS IMU met 0,05° nauwkeurigheid in de X Y-assen. Bevat helling, trillingen, houding detectie met behulp van de WitMotion Fusion Algorithm. Inclusief acceleratie, gyroscoop, hoek, magnetisch, Kalman filtering en quaternion functies.
De WitMotion WT901C IMU-sensor biedt 3-assige versnelling, gyroscoop, hoeksnelheid en magnetisch velddetectie. Het ondersteunt TTL/RS232/RS485 interfaces, heeft een ±16g versnellingsbereik, ±2000°/s gyroscoop, 0.05° statische hoeknauwkeurigheid en werkt tussen -40°C en 85°C.

De WitMotion WT901C IMU-sensor biedt automatisering, VR-headsets, nivellering en trillingsmonitoring. Toepassingen omvatten consumentenelektronica, IoT-integratie, industriële testen en AR/VR. Gratis software biedt gebruiksvriendelijke houdingmeting met realtime hoekgegevens.
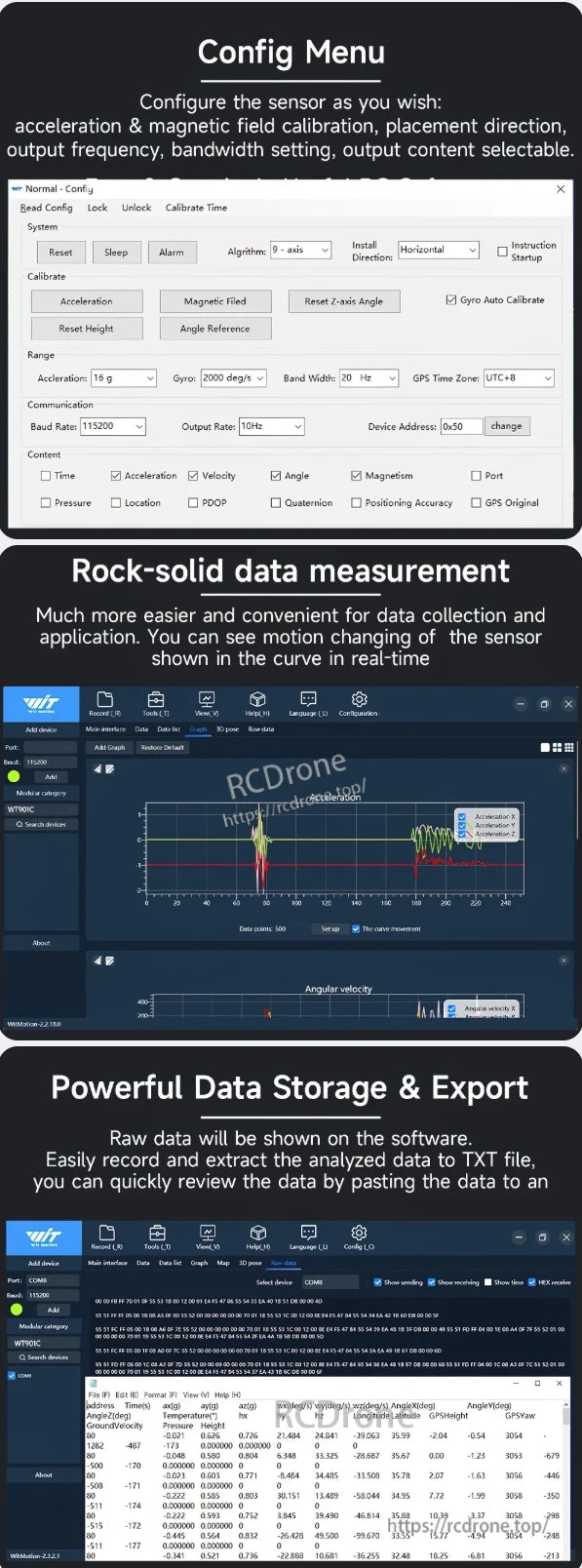
De WitMotion WT901C IMU-sensor biedt configureerbare instellingen voor versnelling, magnetisch veld en oriëntatie. Het biedt realtime datavisualisatie, robuuste metingen en ondersteunt gegevensopslag/export in TXT-formaat voor analyse.
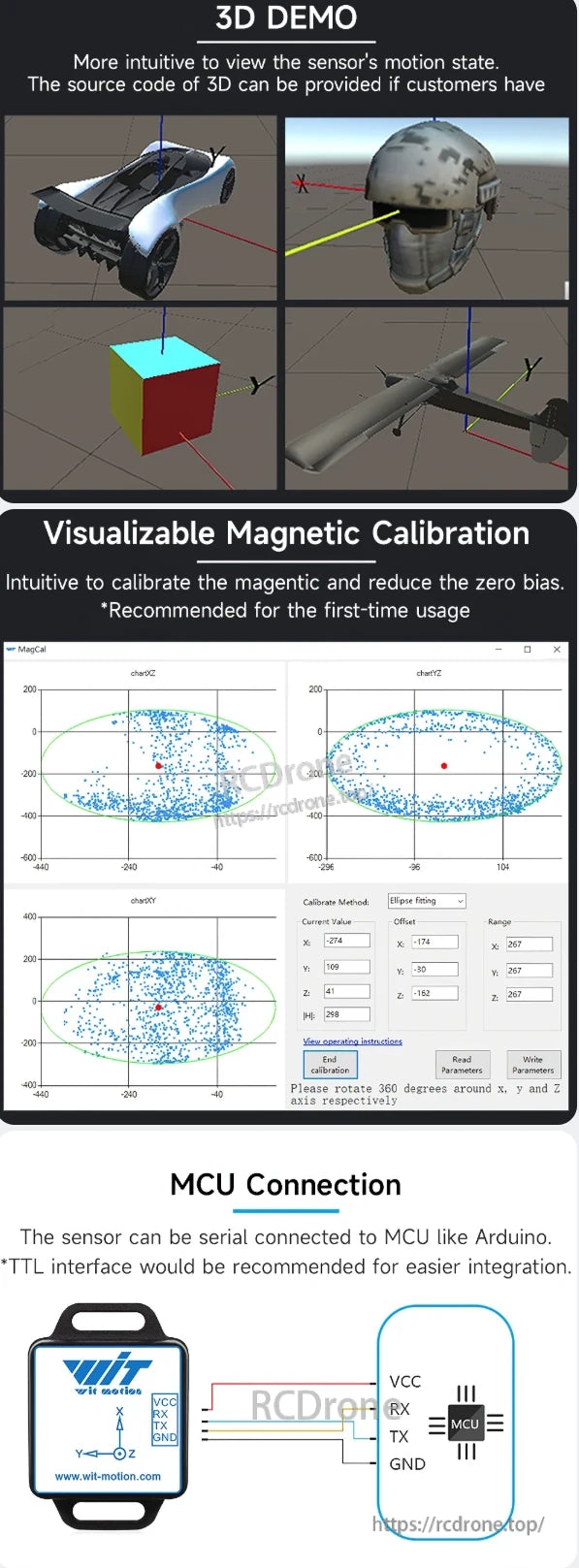
3D-demo visualiseert de sensorbeweging met auto-, helm-, kubus- en drone-modellen. De interface voor magnetische kalibratie maakt intuïtieve aanpassing mogelijk. De details van de MCU-verbinding bevatten een TTL-interface voor Arduino, met gelabelde VCC-, RX-, TX-, GND-pinnen.

Ontwikkelingskits bevatten gratis Windows-software, stuurprogramma's, handleidingen en voorbeeldcodes voor STM32, Arduino, C++, MATLAB. Bevat PDF's, demo-video's en ondersteuning voor Android-apps voor de WT901C IMU-sensor.
IMU-sensor WT901C hoekuitvoersprotocoldetails: datastructuur, hoekberekeningen, checksumformule, verpakking. Bevat roll-, pitch-, yaw-hoeken, firmwareversie en checksum.
Related Collections












