









WitMotion WT901C 9-assige AHRS IMU — Versnellingsmeter, Gyroscoop, Magnetometer met Hoek & Quaternion, 0,05° Nauwkeurigheid, 0,2–200 Hz, TTL/RS232/RS485 Modbus
WitMotion WT901C 9-assige AHRS IMU — Versnellingsmeter, Gyroscoop, Magnetometer met Hoek & Quaternion, 0,05° Nauwkeurigheid, 0,2–200 Hz, TTL/RS232/RS485 Modbus
WitMotion
Kan beschikbaarheid voor afhalen niet laden
Overzicht
De WitMotion WT901C is een compacte 9-assige AHRS IMU die een 3-assige versnellingsmeter, 3-assige gyroscoop en 3-assige magnetometer combineert met WitMotion’s fusie/Kalman-filtering om hoeken (roll/pitch/yaw), hoeksnelheid, versnelling, magnetisch veld en quaternion uit te voeren. Het levert 0.05° statische XY-nauwkeurigheid (0.1° dynamisch), ondersteunt 0.2–200 Hz updatefrequenties en communiceert via TTL, RS232 of RS485 (Modbus)—ideaal voor hellings-, trillings- en houdingmeting in automatisering, nivellering van platforms, VR/AR en industriële tests.
Belangrijkste kenmerken
-
Hoge nauwkeurigheid AHRS: XY statisch 0.05°, dynamisch 0.1°; rechtshandige Cartesiaanse assen.
-
Brede I/O &en spanning: TTL 3.3–5 V, RS232/RS485 5–36 V, baud 4 800–230 400 (standaard 9 600).
-
Configureerbare output: 0.2–200 Hz (standaard 10 Hz); door de gebruiker selecteerbare inhoud.
-
Volledige 9-assige gegevens: Versnelling, hoeksnelheid, magnetisch veld, hoek &en quaternion.
-
Visualisatietools: Windows MiniIMU-software met realtime grafieken, ruwe gegevenslogging/export (TXT), 3D bewegingsdemo, en visuele magnetische kalibratie.
-
Ontwikkelaarsbronnen: Stuurprogramma's (CH340/CP2102), handleidingen/databladen, voorbeeldcode voor 51/C++/STM32/Arduino/Matlab, en Android-app.
-
Flexibele installatie: Verticale of horizontale montage; compact 51 × 36 × 15 mm, ~20 g.
html
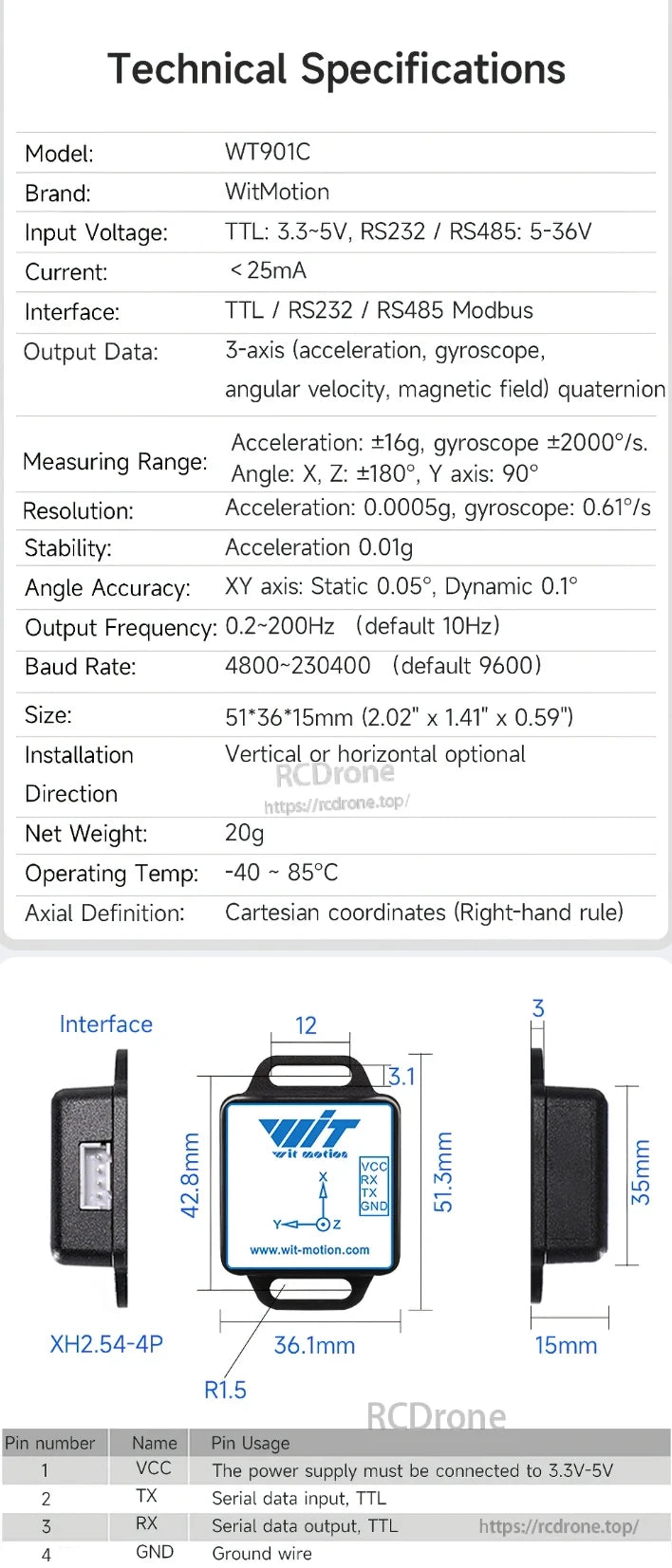
Technische specificaties
-
Model/Merk: WT901C / WitMotion
-
Interfaces: TTL / RS232 / RS485 (Modbus)
-
Ingangsspanning: TTL: 3.3–5 V; RS232/RS485: 5–36 V
-
Stroom: < 25 mA
-
Uitvoergegevens: 3-assige versnelling, gyroscoop (hoeksnelheid), magnetisch veld, hoek, quaternion
-
Meetbereik: Acc ±16 g; Gyro ±2000 °/s; Hoek X,Z ±180°, Y 90°
-
Resolutie: Acc 0.0005 g; Gyro 0.61 °/s
-
Stabiliteit: Acc 0. 01 g
-
Hoeknauwkeurigheid: XY statisch 0.05°, dynamisch 0.1°
-
Uitgangsfrequentie: 0.2–200 Hz (standaard 10 Hz)
-
Baudrate: 4 800–230 400 (standaard 9 600)
-
Afmetingen / Gewicht: 51 × 36 × 15 mm / ≈ 20 g
-
Bedrijfstemperatuur: −40 ~ 85 °C
-
Asdefinitie: Cartesische coördinaten, rechterhandregel
Afmetingen &en connector (TTL-versie)
-
Behuizing: 51.3 mm (H) × 36.1 mm (B) × 15 mm (D); montage oren straal R1.5
-
Connector: XH2.54-4P
-
Pinout (van links naar rechts op label VCC/RX/TX/GND):
-
VCC — voeding 3.3–5 V
-
TX — Seriële gegevensinvoer, TTL
-
RX — Seriële gegevensuitvoer, TTL
-
GND — aarde
-
Opmerking: De asgrafiek is op de behuizing gedrukt (X↑, Y→, Z•), wat helpt bij de uitlijning.
Hoekuitgangsprotocol (frame 0x55 0x53)
| Byte | Inhoud | Betekenis |
|---|---|---|
| 0 | 0x55 | Koptekst |
| 1 | 0x53 | Hoekframe-ID |
| 2–3 | RollL/RollH | X-as hoek |
| 4–5 | PitchL/PitchH | Y-as hoek |
| 6–7 | YawL/YawH | Z-as hoek |
| 8–9 | VL/VH | Firmwareversie (laag/hoog) |
| 10 | Som | Checksum |
Hoekconversie:Rol = ((RollH<<8)|RollL)/32768*180°Pitch = ((PitchH<<8)|PitchL)/32768*180°Yaw = ((YawH<<8)|YawL)/32768*180°
(Versnelling en hoeksnelheid frames zijn vergelijkbaar; zie handleiding.)
Software &en gereedschappen
-
Windows (MiniIMU.exe): apparaatconfiguratie (bereiken, bandbreedte, uitvoersnelheid), realtime grafieken, ruwe datavisualisatie, 3D houding visualisatie, exporteren naar TXT.
-
Magnetische kalibratie: visuele ellips-aanpassingsworkflow om bias te verminderen (draaien rond X/Y/Z).
-
MCU-integratie: directe seriële verbinding; TTL aanbevolen voor eenvoudige MCU-aansluiting (Arduino/STM32, enz.).
-
Inbegrepen bronnen: Datasheet.pdf, Manual.pdf, CH340 &en CP2102-stuurprogramma's, voorbeeldcode, Android App, demo video's.
Typische toepassingen
Automatisering | Hellings-/niveau monitoring | Trillingsmonitoring | Nivelleren van platforms | IoT-systeemintegratie | Industriële testen | VR/AR-headsets | Consumentenelektronica.
Details

Kosteneffectieve AHRS IMU met een nauwkeurigheid van 0,05° in de X- en Y-as. Beschikt over hellings-, trillings- en houdingdetectie met behulp van het WitMotion Fusion-algoritme. Inclusief versnelling, gyroscoop, hoek, magnetisch, Kalman-filtering en quaternionfuncties.
WitMotion WT901C IMU biedt 3-assige detectie met versnelling, gyroscoop en magnetometer. Biedt quaternionuitvoer. Ondersteunt TTL, RS232, RS485. Meet ±16g, ±2000°/s, ±180° hoeken. Compacte afmetingen van 51×36×15mm. Werkt van -40 tot 85°C.

WitMotion WT901C IMU ondersteunt automatisering, VR-headsets, nivellering en trillingsmonitoring. Het is geschikt voor consumentenelektronica, IoT, industriële tests en AR/VR. Wordt geleverd met gratis software voor realtime hoekgegevensweergave.

Het WitMotion WT901C IMU-configuratiemenu biedt mogelijkheden voor sensorcalibratie, gegevensuitvoersinstellingen en realtime bewegingsvisualisatie. Het ondersteunt een 9-assige algoritme, aanpasbare versnelling, gyroscoop, bandbreedte en GPS-tijdzone. Realtime grafieken tonen versnelling en hoeksnelheid voor nauwkeurige metingen.
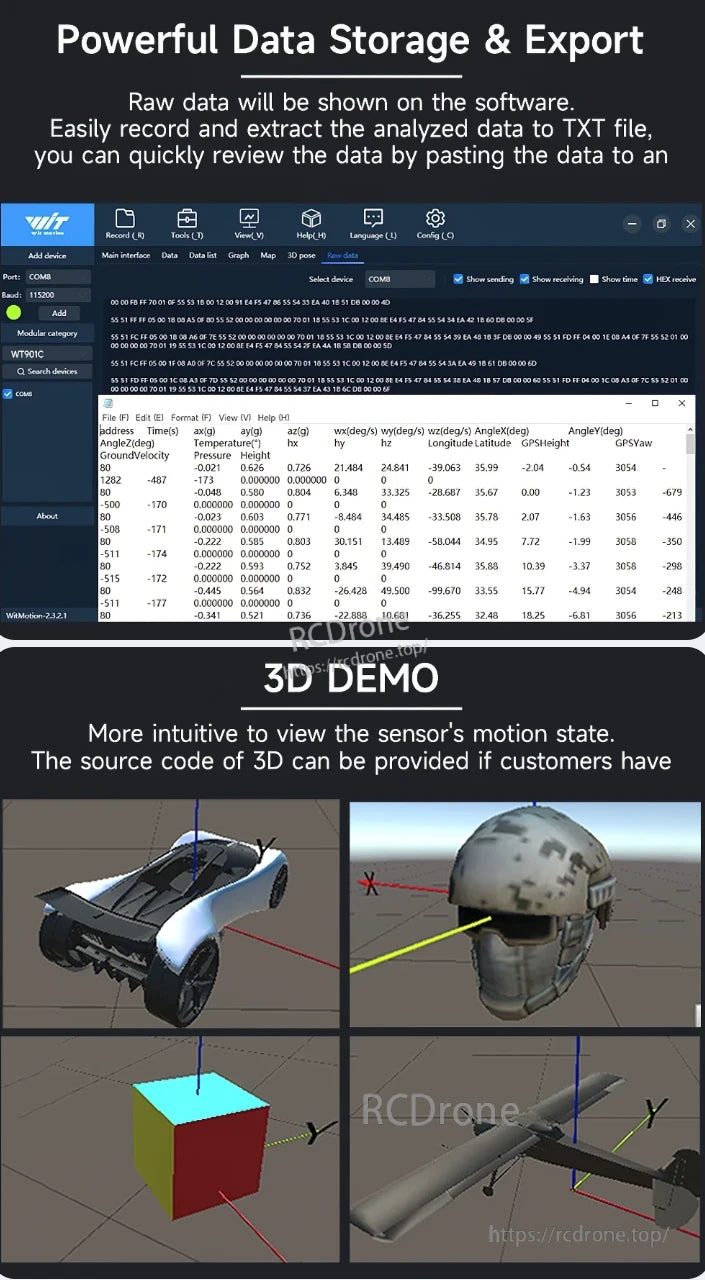
De WitMotion WT901C IMU biedt krachtige gegevensopslag, eenvoudige TXT-export en 3D-bewegingsvisualisatie met beschikbare broncode.
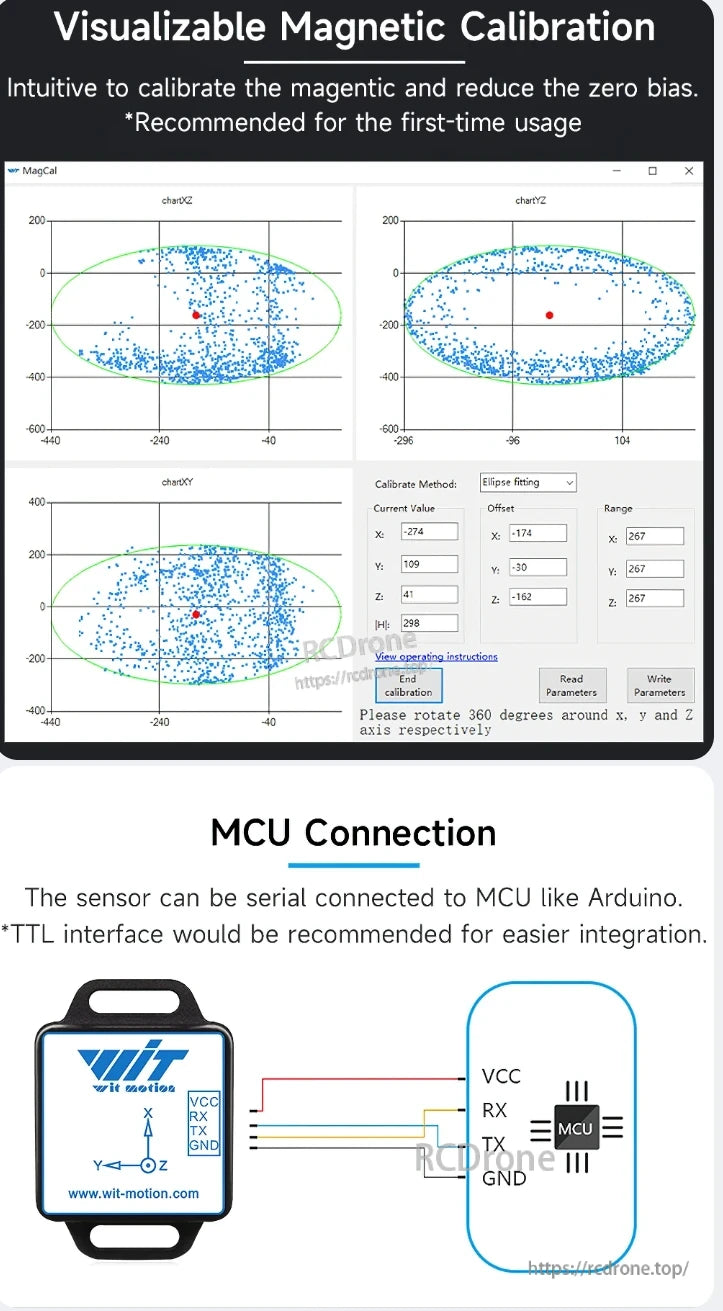
Visualiseerbare magnetische calibratie voor de WT901C IMU met de ellipspassingmethode. Verbinding met de MCU via TTL-interface wordt aanbevolen. De sensor verbindt met Arduino-achtige MCU's met behulp van VCC, RX, TX, GND-pinnen.
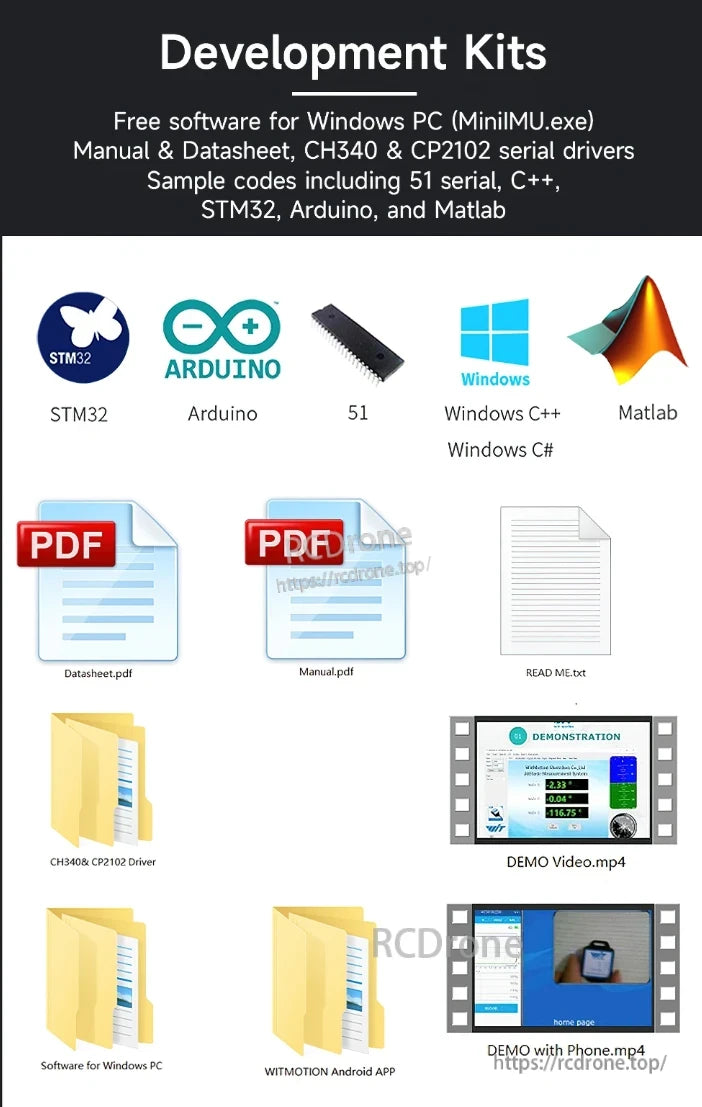
Ontwikkelingskits bevatten gratis software voor Windows, handleiding, datasheet, CH340 & CP2102-stuurprogramma's, voorbeeldcodes voor 51, C++, STM32, Arduino en Matlab, samen met demo-video's en een Android-app.
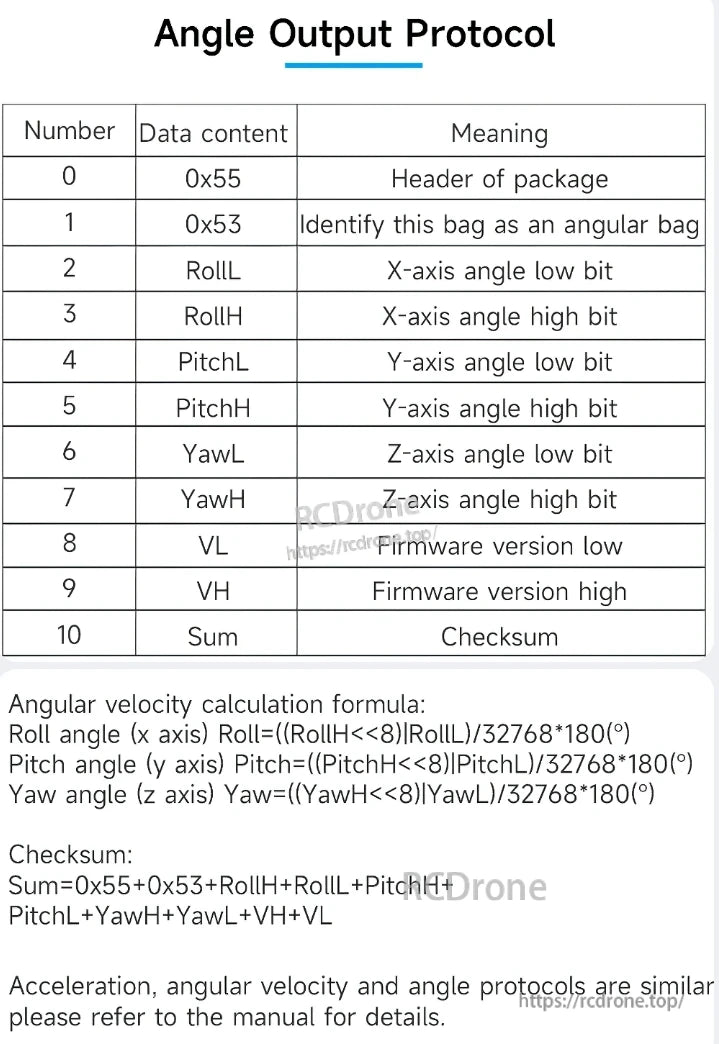
De datastructuur voor de WT901C IMU-hoekuitvoer omvat een header, roll, pitch, yaw, firmwareversie en checksum. Formules voor berekeningen en verificatie worden verstrekt. Vergelijkbare structuren bestaan voor versnelling en hoeksnelheid.
Related Collections









