








WitMotion WTRTK-M ZED-F9P RTK GNSS GPS-module, centimeter-nauwkeurige positionering voor UAV/auto, GPS/GLONASS/Galileo/BeiDou, UART TTL, NMEA/UBX/RTCM
WitMotion WTRTK-M ZED-F9P RTK GNSS GPS-module, centimeter-nauwkeurige positionering voor UAV/auto, GPS/GLONASS/Galileo/BeiDou, UART TTL, NMEA/UBX/RTCM
WitMotion
Kan beschikbaarheid voor afhalen niet laden
Overzicht
WTRTK-M is een hoogprecisie RTK differentiële positionering module gebouwd op de u-blox ZED-F9P GNSS-engine. Het volgt GPS, GLONASS, Galileo, BeiDou en QZSS gelijktijdig en levert centimeter-niveau nauwkeurigheid na RTK-correctie. De module biedt dual-frequency ontvangst, 5 Hz realtime output voor mapping/autonome toepassingen, en een PC-tool voor een-knop configuratie van mobiele/basisstations en routevisualisatie. Anti-interferentie en calibratietechnologieën verbeteren de datastabiliteit en -beveiliging.
Belangrijkste Kenmerken
-
Centimeter-niveau RTK: mobiele/basis workflow met snelle convergentie.
-
Multi-constellatie, dual-frequency: GPS L1/L2; GLONASS G1/G2; BeiDou B1/B2; Galileo E1/E5b; QZSS L1/L2.
-
Hoge gevoeligheid &en snelle start: 184 kanalen; koude start 24 s, warme start 2 s, herovername 2 s; convergentie ≤10 s.
-
Tijd/hoofdprestaties: 1PPS RMS 30 ns (99% 60 ns); nauwkeurigheid van de koers 0,4° (dynamisch 0,3°).
-
Rijke protocollen: NMEA, UBX, RTCM 3.3; draaggolffase (RAWX) ondersteund.
-
Configureerbare snelheid &en 1 PPS: 0,25–20 Hz update (standaard 1 Hz); tweede puls 0,25 Hz–10 MHz (standaard periode 1 s, hoog niveau ~100 ns).
-
Dual UART (TTL) en SMA-K / IPEX antenne opties; PC-software voor het bekijken van sporen en apparaatinstellingen.
-
Toepassingsscenario's: UAV-onderzoek/kaartvorming, autonome tractoren/AGV, hoge-precisie voertuignavigatie, robotica.
Hoe RTK Werkt (kort)
Een vaste basisstation berekent de fout in satellietmetingen ten opzichte van zijn bekende positie en zendt RTCM-differentiële gegevens uit. Het mobiele station past deze correcties toe om real-time, centimeter-niveau positionering te bereiken.
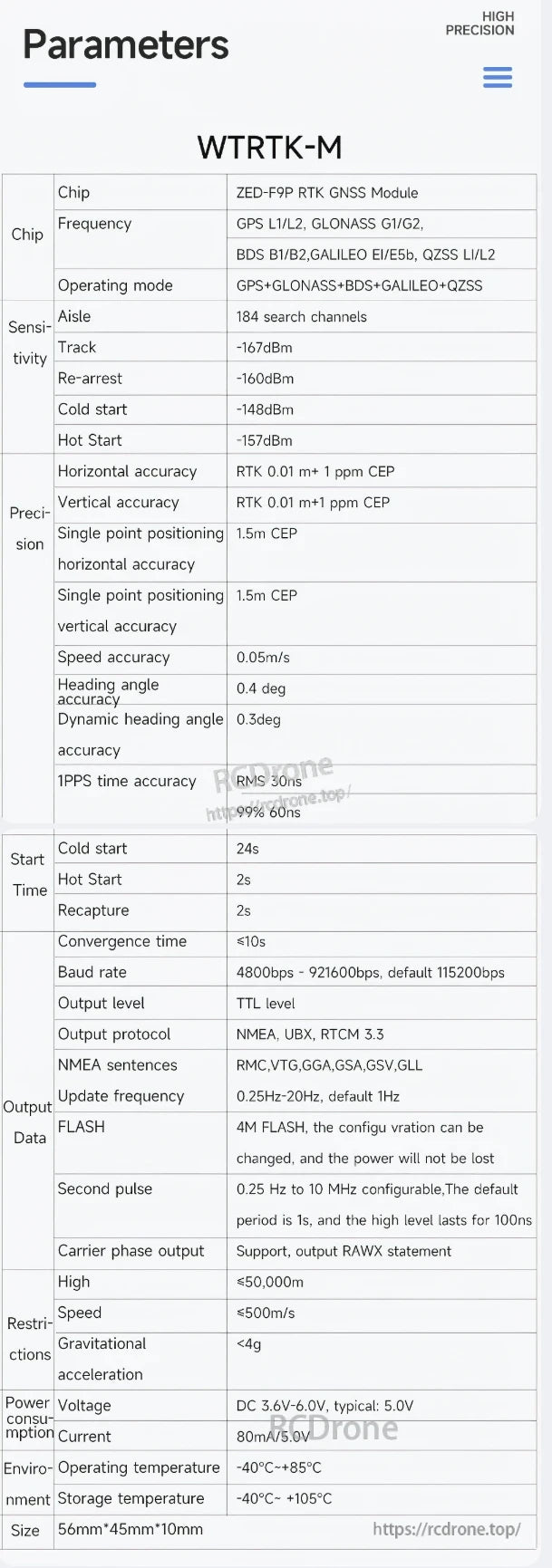
htmlBasis Specificaties
| Artikel | Specificatie |
|---|---|
| GNSS-chip | ZED-F9P RTK GNSS Module |
| Constellaties/Banden | GPS L1/L2, GLONASS G1/G2, BeiDou B1/B2, Galileo E1/E5b, QZSS L1/L2 |
| Kanalen | 184 zoekkanalen |
| Gevoeligheid | Tracking -167 dBm; herovering -160 dBm; koude start -148 dBm; warme start -157 dBm |
| RTK-nauwkeurigheid (CEP) | Horizontaal/Verticaal: 0.01 m + 1 ppm CEP |
| Enkelpunt nauwkeurigheid (CEP) | Horizontaal 1.5 m, Verticaal 1. 5 m |
| Snelheidsnauwkeurigheid | 0.05 m/s |
| Hoofdnauwkeurigheid | 0.4° (dynamisch 0.3°) |
| 1PPS tijdnauwkeurigheid | RMS 30 ns, 99% 60 ns |
| Start/Herpakken | Koud 24 s, Warm 2 s, Herpakken 2 s; Convergentie ≤10 s |
| Baudrate | 4 800–921 600 bps (standaard 115 200 bps) |
| Elektrisch niveau | TTL |
| Protocollen | NMEA, UBX, RTCM 3.3; NMEA zinnen: RMC/VTG/GGA/GSA/GSV/GLL |
| Updatefrequentie | 0.25–20 Hz (standaard 1 Hz); opmerking: zeer hoge snelheden verhogen de seriële belasting—houd ≤ 5 Hz voor betrouwbaarheid |
| Onboard flash | 4 MB, behoudt configuratie na uitschakeling |
| Carrier fase | RAWX output ondersteund |
| Beperkingen | Hoogte ≤ 50 000 m; Snelheid ≤ 500 m/s; Versnelling < 4 g |
| Voeding | DC 3.6–6.0 V (typ. 5.0 V), ≈ 80 mA @ 5 V |
| Bedrijf / Opslag | -40 °C tot +85 °C / -40 °C tot +105 °C |
| Afmetingen | 56 × 45 × 10 mm (voorzijde diagram markeringen ~46 mm hoogte) |
Interfaces & Indicatoren
Antenne: SMA-K (met IPEX optie).
UART-poorten (TTL, 4-pins elk):
-
P1 (rechts) – VI (3.6–6.0 V, 5 V rec.), G (GND), T1 (TX), R1 (RX).
-
P2 (links) – VO (3.6–6.0 V, 5 V rec.), G (GND), T2 (TX), R2 (RX).
html
P2 wordt gebruikt om RTC in/uit te voeren; P1 geeft NMEA gegevens uit. P1/P2 VCC zijn intern verbonden—voeding van een van beide.
LED's
-
PWR: Rood AAN = voeding toegepast.
-
TX1/TX2: Groen knippert = poort heeft gegevensuitvoer.
-
PPS: Uit voor fix; blauw knippert na 3D positionering.
-
RTK: Uit wanneer niet in RTK; blauw knippert in RTK Float; AAN in RTK Fixed.
Verbinding & Software
-
Bedrade setup: sluit antenne aan op SMA; sluit UART1 aan op PC om locatiegegevens te bekijken.
-
Basis/Mobiel: stel één module in als basis (uitgangen RTCM); de mobiele gebruikt RTCM om RTK te bereiken—mobiel kan direct als een RTK rover worden gebruikt na het ontvangen van correcties.
-
PC-software: trackvisualisatie, datavisualisatie en één-toets basis/rover configuratie.
Opmerkingen
-
Standaard baud is 115 200 bps. Als je de uitvoerfrequentie verhoogt, verhoog dan de baud overeenkomstig om overloop te voorkomen (praktische bovengrens ≤ 5 Hz op standaardverbindingen).
-
Aangepaste ontwikkeling ondersteund.
Details
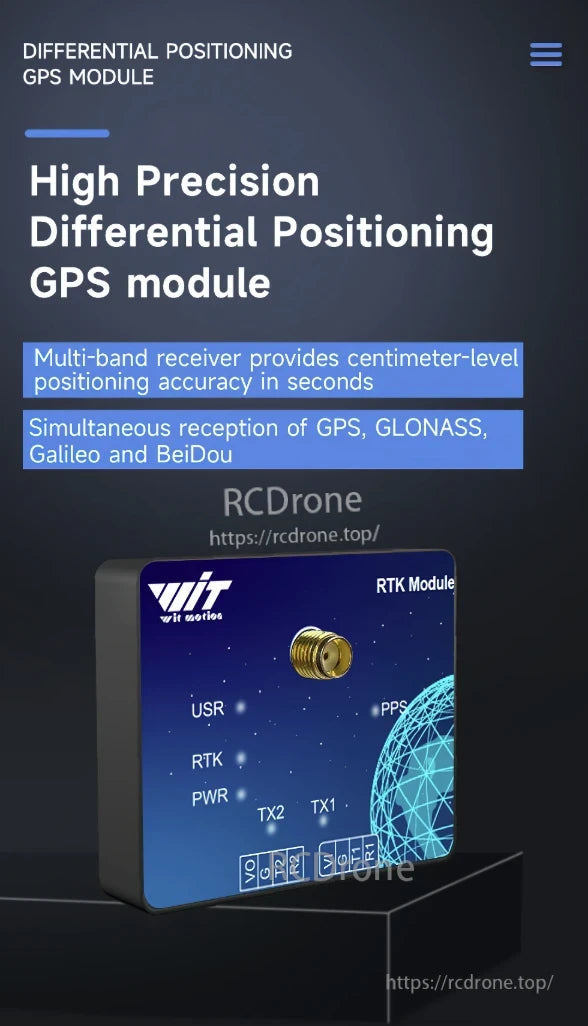
Hoogprecisie differentiële positionering GPS-module met centimeter-niveau nauwkeurigheid. Ondersteunt GPS, GLONASS, Galileo, BeiDou.Multi-band ontvanger, RTK-technologie, PPS, TX1, TX2, USR, RTK, PWR-indicatoren.
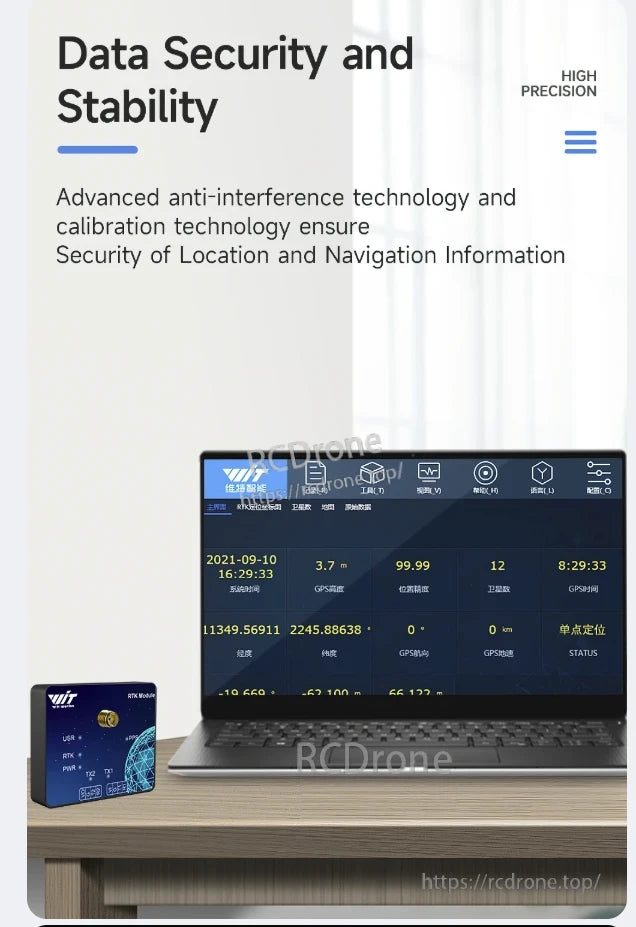
WitMotion WTRTK-M ZED-F9P RTK GNSS GPS zorgt voor hoge precisie, gegevensbeveiliging en stabiliteit met geavanceerde anti-interferentie en kalibratietechnologie voor betrouwbare locatie- en navigatie-informatie.
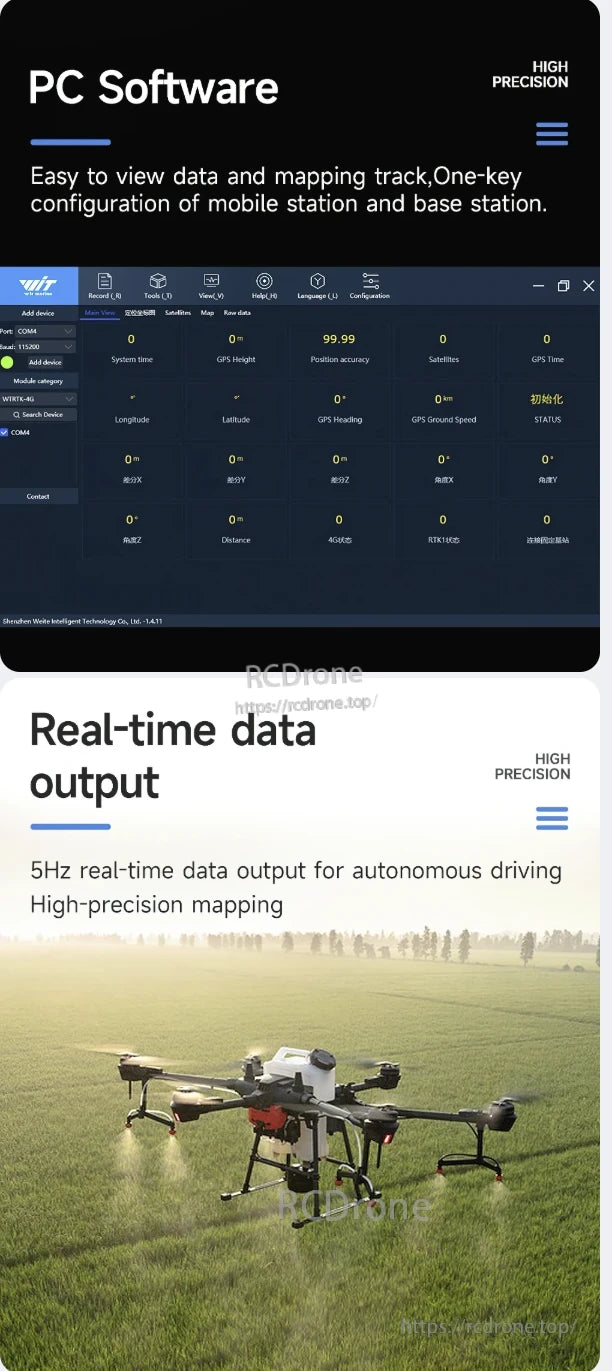
Hoge precisie RTK GNSS GPS-software met 5Hz real-time gegevensuitvoer voor autonoom rijden en mapping. Ondersteunt één-knop installatie, satelliettracking, nauwkeurige positionering en gedetailleerde telemetrie.
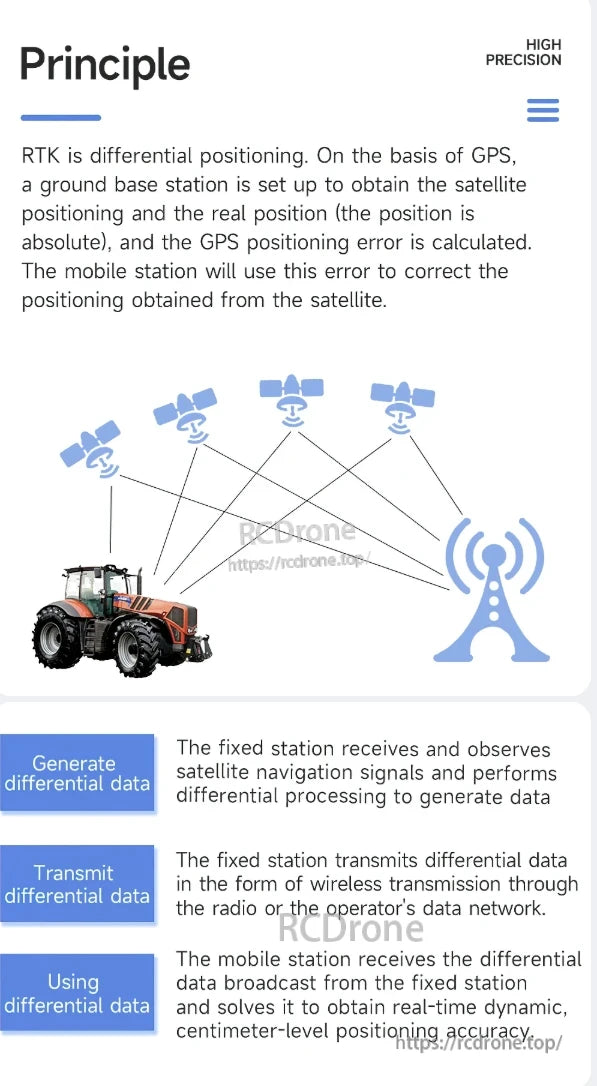
RTK maakt gebruik van differentiële positionering met GPS. Een vaste station berekent satellietpositioneringsfouten en verzendt correcties draadloos naar een mobiel station, waardoor centimeter-niveau real-time nauwkeurigheid mogelijk is voor nauwkeurige navigatie.
WTRTK-M beschikt over de ZED-F9P RTK GNSS-module met ondersteuning voor meerdere constellaties, hoge precisie (0.01m), snelle opstarttijden, meerdere protocollen en werkt van -40°C tot +85°C.


Bedrade aansluitingsschema voor WitMotion RTK-module: basis/mobiele station opstellingen, SMA-antennes, UART1 PC-verbindingen. Inclusief software, handleiding, video en protocolbronnen.
Duale frequentie antenne en positioneringsmodule voor hoge precisie GNSS GPS
Related Collections








