Yahboom CMP10A 10-assige IMU-sensormodule voor ROS-robots, Gyro/Versnelling/Magneet/Baro, USB UART I2C
Yahboom CMP10A 10-assige IMU-sensormodule voor ROS-robots, Gyro/Versnelling/Magneet/Baro, USB UART I2C
Yahboom
Kan beschikbaarheid voor afhalen niet laden
Overzicht
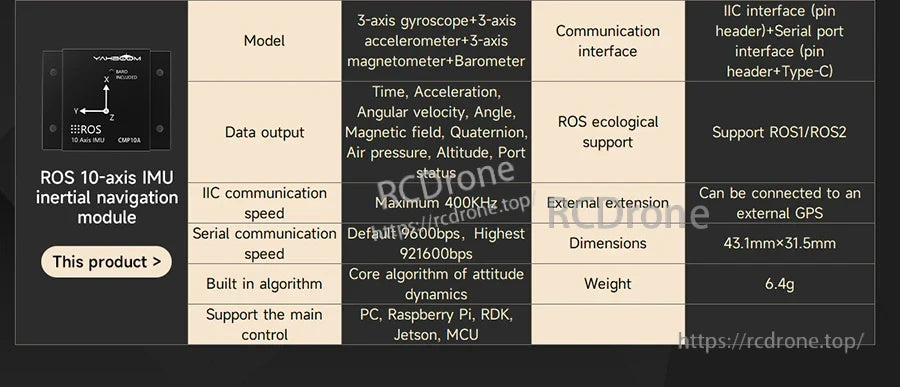
De Yahboom CMP10A is een 10-assige IMU-sensormodule (inertiële navigatie / AHRS-module) ontworpen voor ROS-robots en embedded controllers. Het integreert een 3-assige gyroscoop, 3-assige versnellingsmeter, 3-assige magnetometer en barometer (luchtdrukmeter) om houding- en bewegingsgegevens zoals Euler-hoeken (rol, pitch, yaw), quaternion, hoeksnelheid, versnelling en magnetisch veldvector uit te voeren. De module ondersteunt USB/UART/I2C-communicatie voor flexibele integratie in robotica- en navigatieprojecten.
Belangrijkste Kenmerken
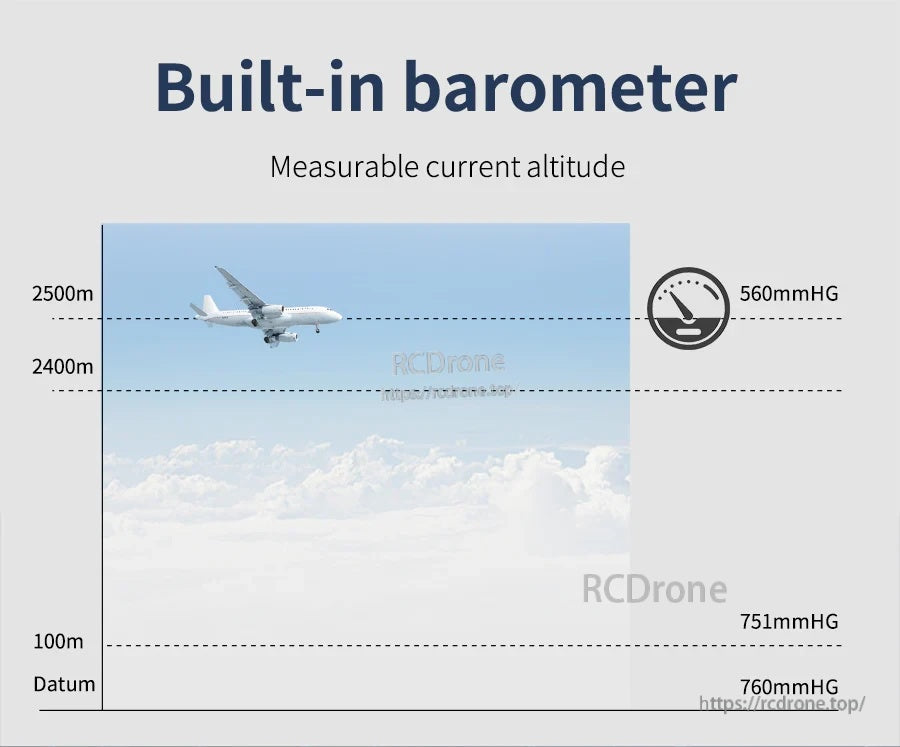
- 10-assige sensor set: 3-assige gyroscoop + 3-assige versnellingsmeter + 3-assige magnetometer + barometer.
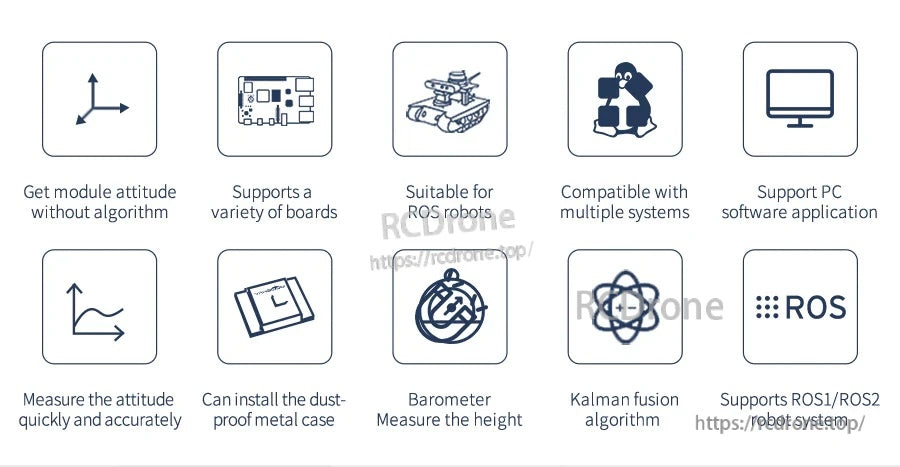
- Ingebouwde fusie-algoritmen: Kalman-fusie-algoritme wordt geleverd; materialen beschrijven ook een attitude-dynamica kernalgoritme en AHRS-houdingsdatafusie.
- Realtime outputs (zoals beschreven): magnetisch veld vector, versnelling, gyroscoopgegevens, Euler-hoeken (rol/helling/yaw), quaternion; materialen vermelden ook positie, snelheid, hoogte, luchtdruk, temperatuur, tijd en poortstatus.
- Update/retourneerfrequentie tot 200 Hz.
- Seriële baudrate tot 921600 bps (standaard 9600 bps is ook vermeld).
- Interfaces: USB (Type-C), UART/Serieel TTL, en I2C (IIC).
- ROS ecosysteem ondersteuning: ondersteunt ROS1 en ROS2.
- Optie voor metalen behuizing: helpt bij warmteafvoer, vermindert externe interferentie en kan worden gebruikt als een stofdichte beschermende behuizing.
- Accepteert seriële GPS-gegevens conform NMEA-0183 om een GPS-IMU geïntegreerde navigatie-eenheid te vormen (met GPS-module).
- PC software ondersteuning voor parameteraanpassing en realtime attitude visualisatie via een 3D-model (zoals beschreven).
Specificaties
| Model / Serie | CMP10A (ROS 10 Axis IMU) |
|---|---|
| Sensoren | 3-assige gyroscoop + 3-assige versnellingsmeter + 3-assige magnetometer + barometer |
| Update / Retourfrequentie | Tot 200 Hz |
| Seriële communicatiesnelheid | Standaard 9600 bps; hoogste 921600 bps (ander materiaal vermeldt 115200 bps voor een hoogprecisie 10-assige board) |
| I2C (IIC) communicatiesnelheid | Maximaal 400 kHz (ander materiaal vermeldt maximaal 100 kHz voor een hoogprecisie 10-assige board) |
| Communicatie-interfaces | IIC-interface (pinnenheader) + Seriële poortinterface (pinnenheader) + Type-C |
| ROS-ondersteuning | Ondersteunt ROS1 / ROS2 |
| Externe uitbreiding | Kan worden aangesloten op een externe GPS |
| Afmetingen | 43.1 mm x 31,5 mm (een ander materiaal vermeldt 24,5 mm x 31 mm) |
| Gewicht | 6,4 g (een ander materiaal vermeldt 3,9 g) |
| Stabiele hoekuitvoer (vermeld) | Yaw-hoek: 0,5° RMS; houding: 0.1° RMS |
| Hoekuitvoer (vermeld) | 360° stabiele en continue hoekuitvoer |
| Ondersteunde hoofdcontrollers (vermeld) | PC, Raspberry Pi, RDK, Jetson, MCU; multi-ROS master ondersteuning is ook vermeld voor Jetson, Raspberry Pi, IPC, STM32, MSPM0, RDK-serie |
Wat is inbegrepen
- CMP10A
- CMP10A met behuizing
- CMP10A met metalen behuizing + YDLIDAR X3
- CMP10A + GPS Positioneringsmodule
Toepassingen
- ROS robot houding detectie, oriëntatie schatting en navigatie ontwikkeling
- Robotica mapping/navigatie workflows in combinatie met lidar of GPS modules (opties beschikbaar)
- Embedded IMU/AHRS data-acquisitie voor PC, Raspberry Pi, Jetson en MCU platforms
Voor hulp bij pre-sales selectie (CMP10A vs. metalen behuizing vs. GPS/lidar-bundels) of integratie-ondersteuning, neem contact op met https://rcdrone.top/ of e-mail [email protected].
Details


CMP10A integreert een 3-assige gyro, versnellingsmeter, magnetometer en barometer met USB/UART/I2C-opties voor robotica-integratie.
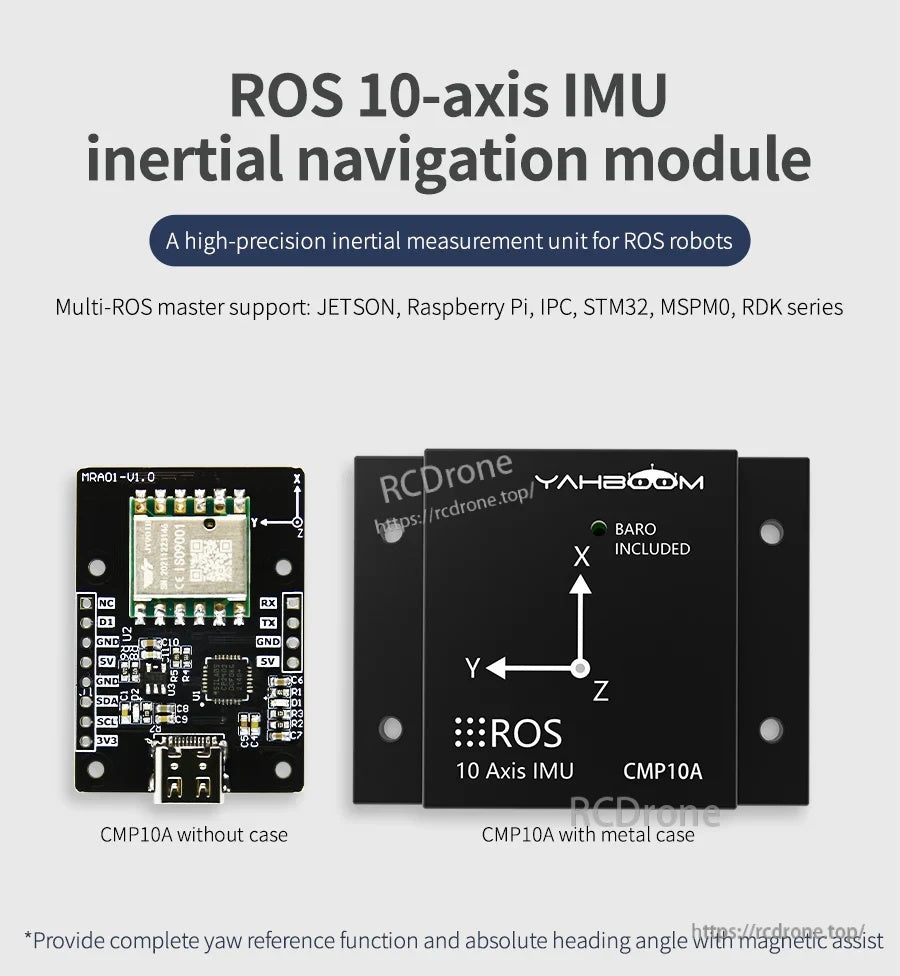
Kies de kale printplaat voor compacte constructies of de metalen behuizingsoptie voor extra bescherming en verbeterde warmteafvoer.

Ontworpen voor real-time AHRS/IMU-uitvoer, biedt de module attitudedata zoals Euler-hoeken en quaternion voor besturing en navigatie.
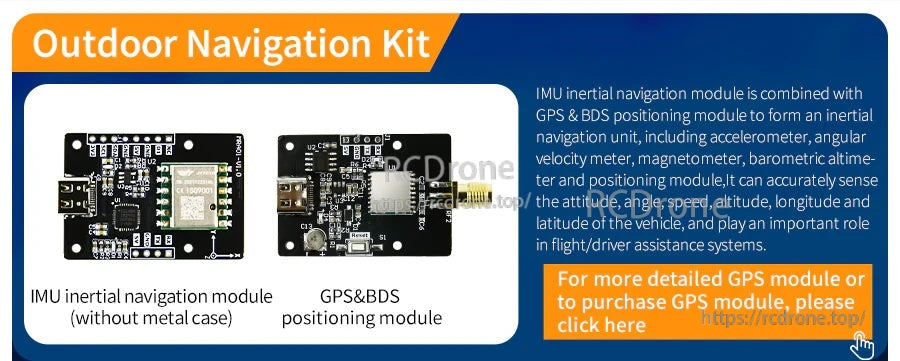
Voeg een extern GPS-module toe om een GPS‑IMU geïntegreerde navigatie-opstelling te bouwen voor buitenpositioneringsprojecten.
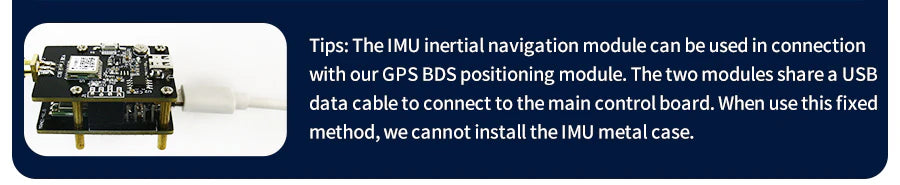
USB-bekabeling maakt het eenvoudig om de IMU en optionele GPS-kaart aan te sluiten op de hoofdcomputer voor gegevensinvoer.

ROS1- en ROS2-compatibiliteit helpt bij het stroomlijnen van sensorintegratie in veelgebruikte robotica-stacks.
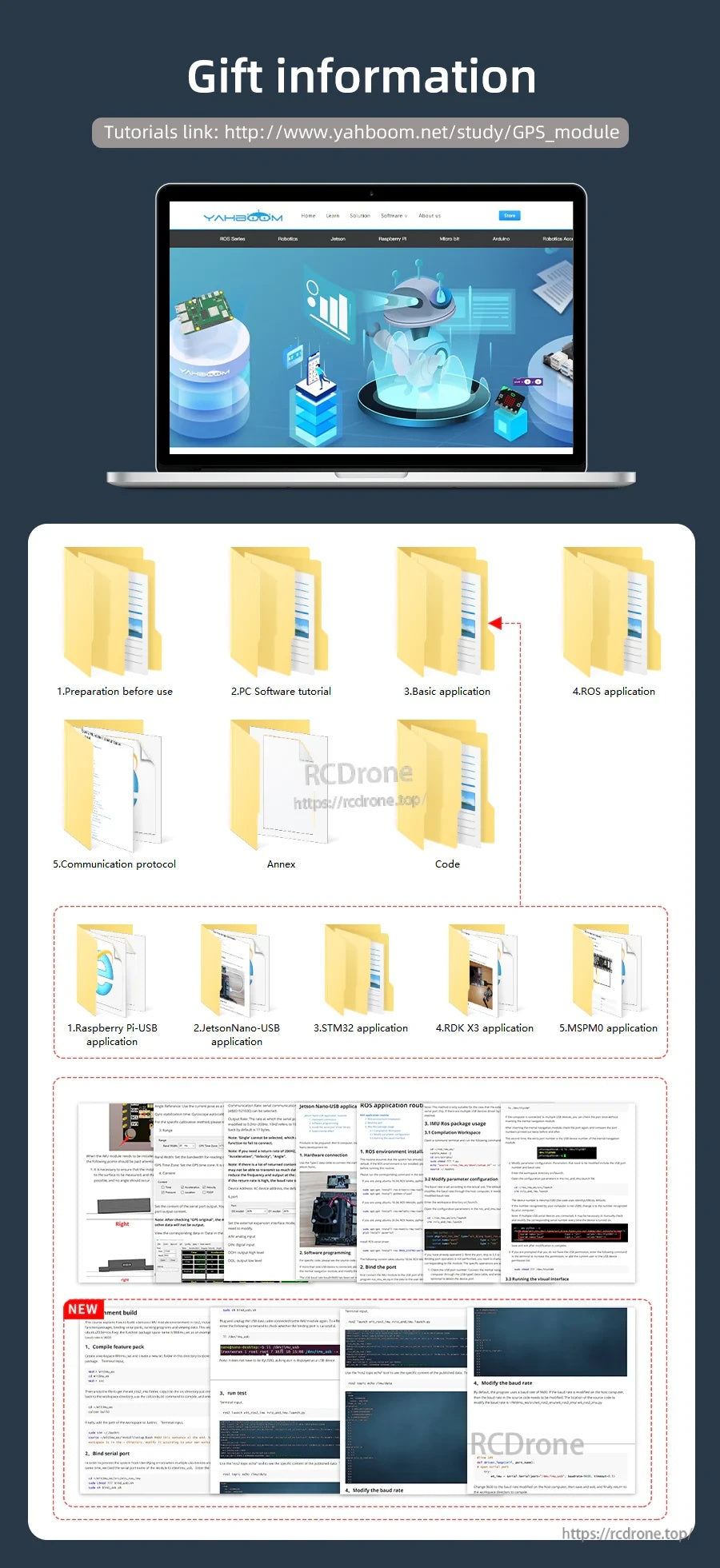
Documentatie, voorbeeldcode en pc-tools worden geleverd om de parameterinstelling en datavisualisatie tijdens de ontwikkeling te versnellen.

Hoge-snelheidsuitvoer en onboard fusie ondersteunen responsieve houdingsfeedback voor embedded controllers en ROS-robots.
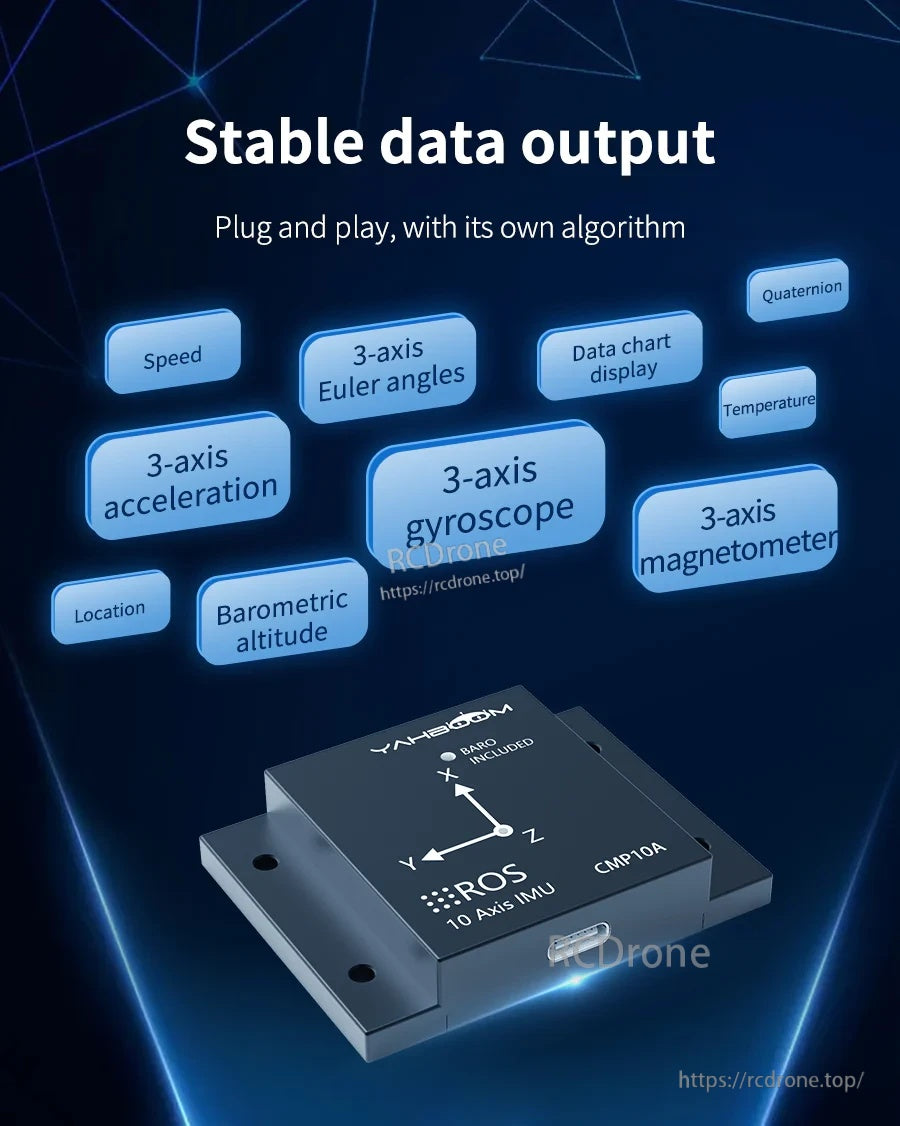
Plug-and-play gegevensuitvoer omvat versnelling, hoeksnelheid, magnetisch veld, Euler-hoeken en quaternion voor bewegingsregistratie.
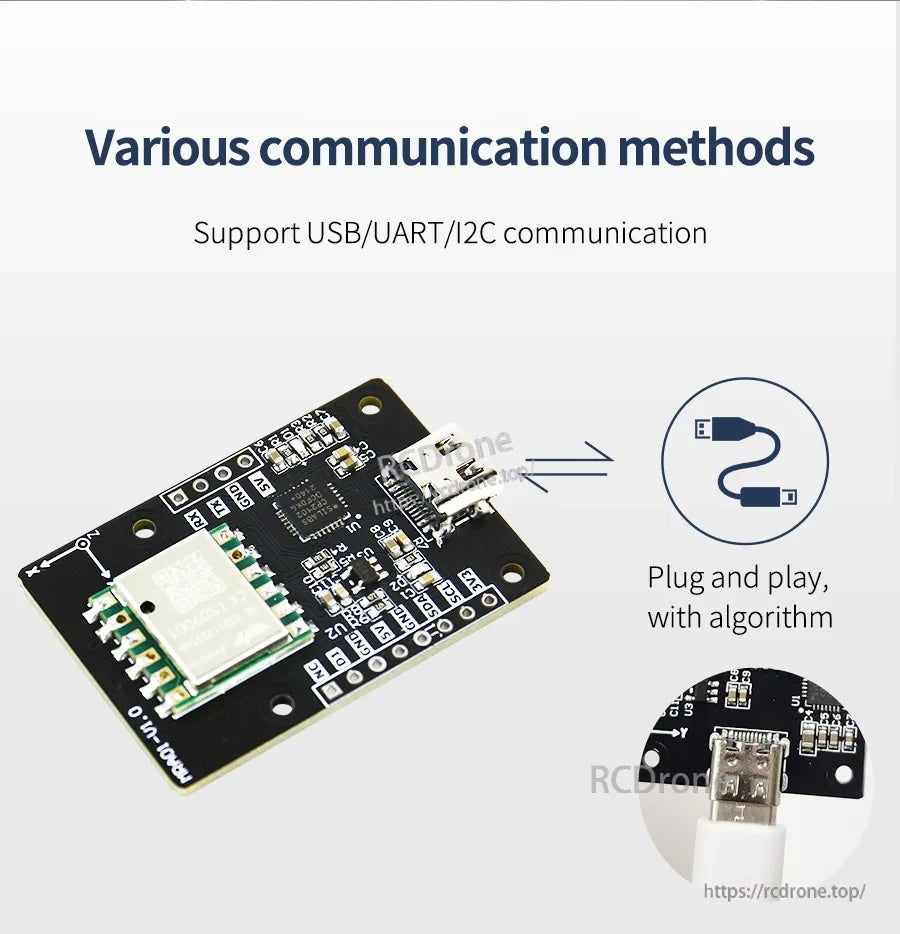
De Yahboom CMP10A IMU-module ondersteunt USB-, UART- en I2C-verbindingen voor flexibele installatie met gangbare controllers en pc's.
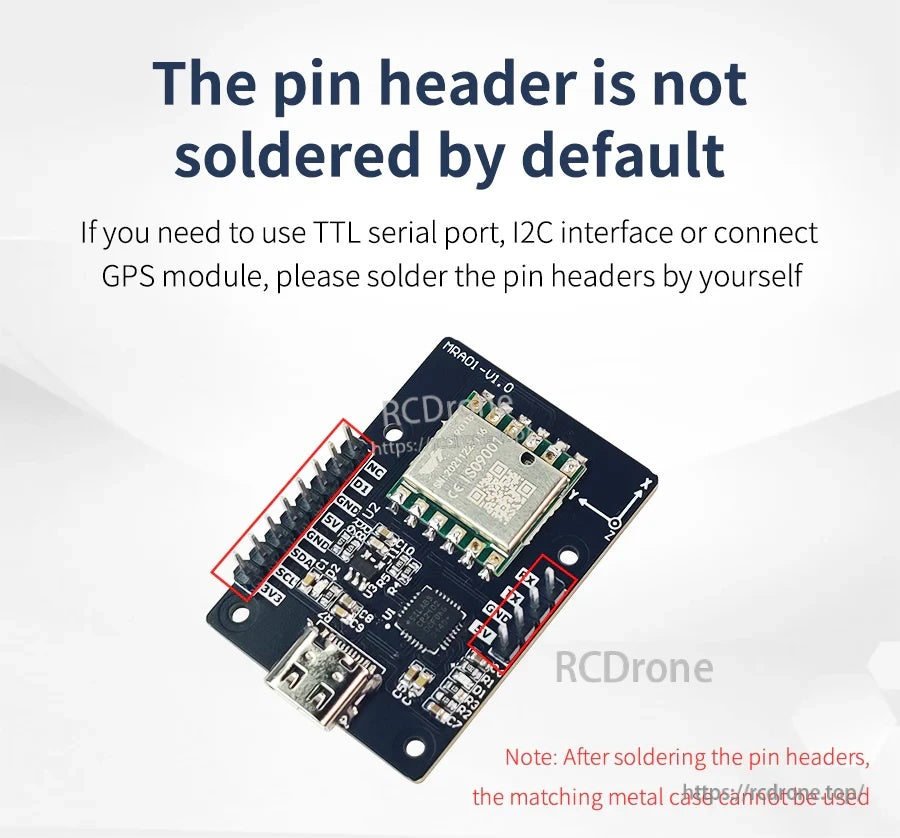
De CMP10A IMU-kaart gebruikt een micro-USB-connector en vereist het solderen van de pinheaders om TTL-serieel, I2C of een GPS-module te gebruiken.
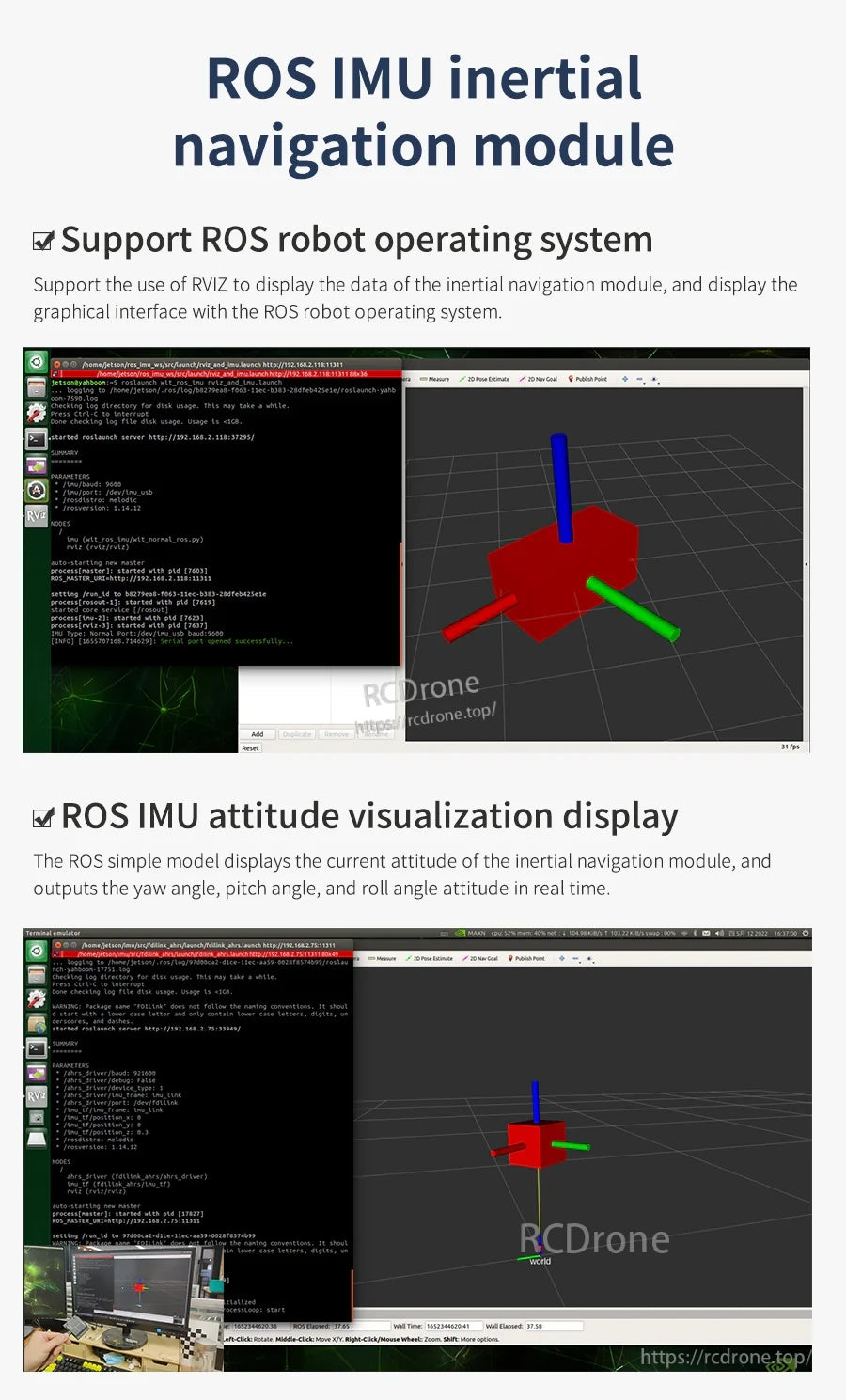
ROS-ondersteuning maakt het mogelijk om IMU-orientatiegegevens te visualiseren in RViz naast live terminaluitvoer voor installatie en foutopsporing.
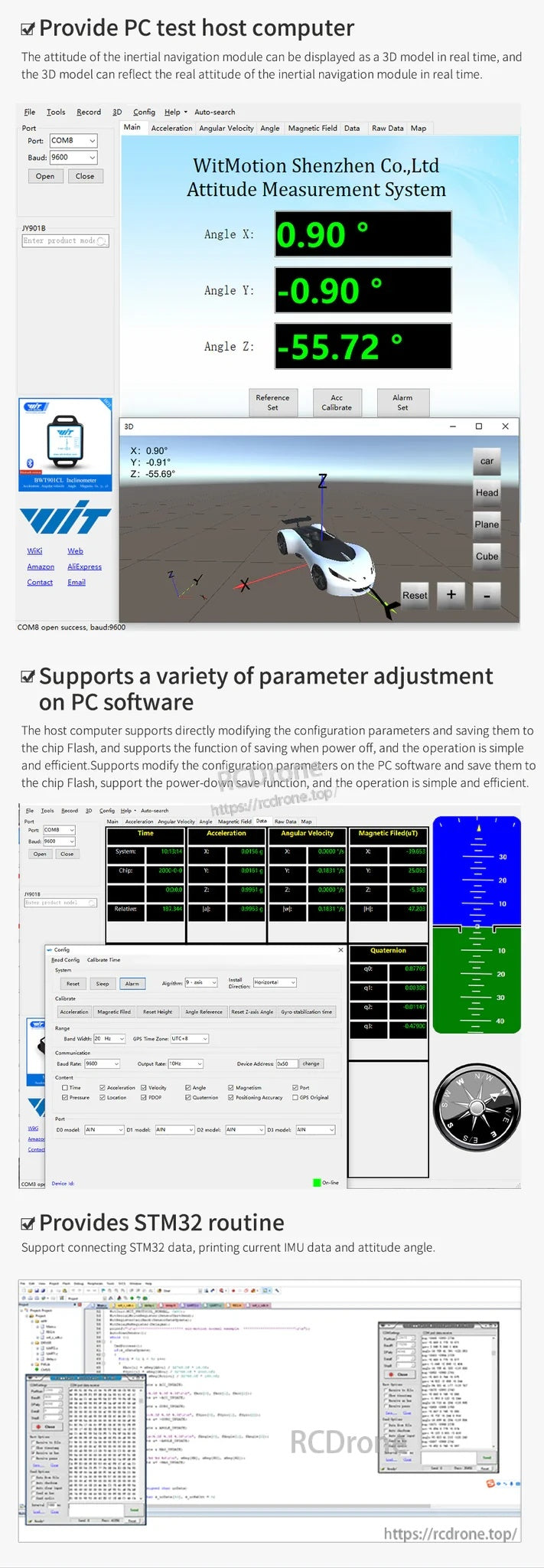
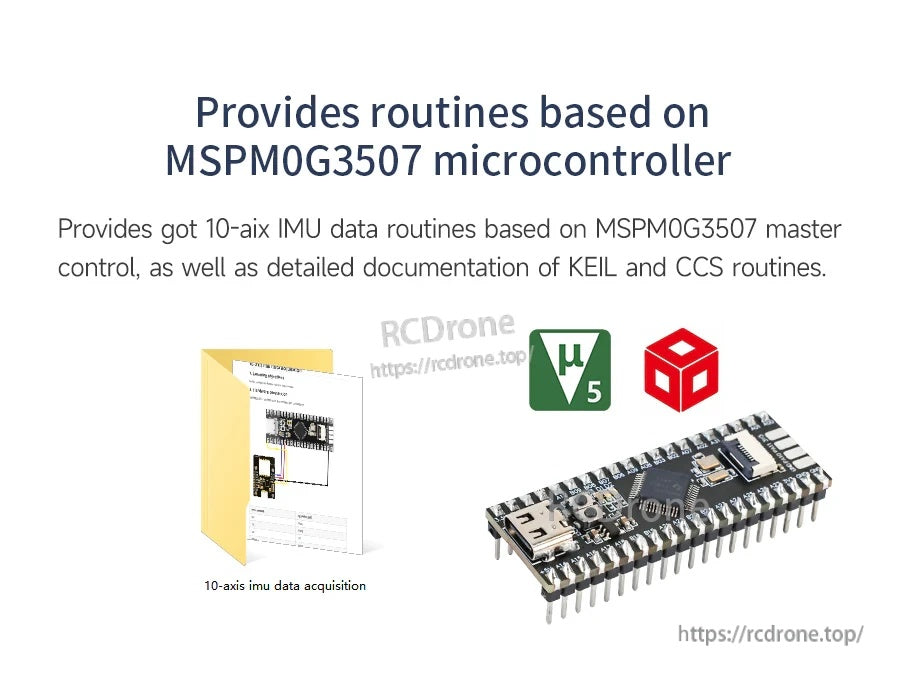
De CMP10A IMU ondersteunt pc-software voor live monitoring van de houdinghoek, parameteraanpassingen en STM32 routinevoorbeelden.
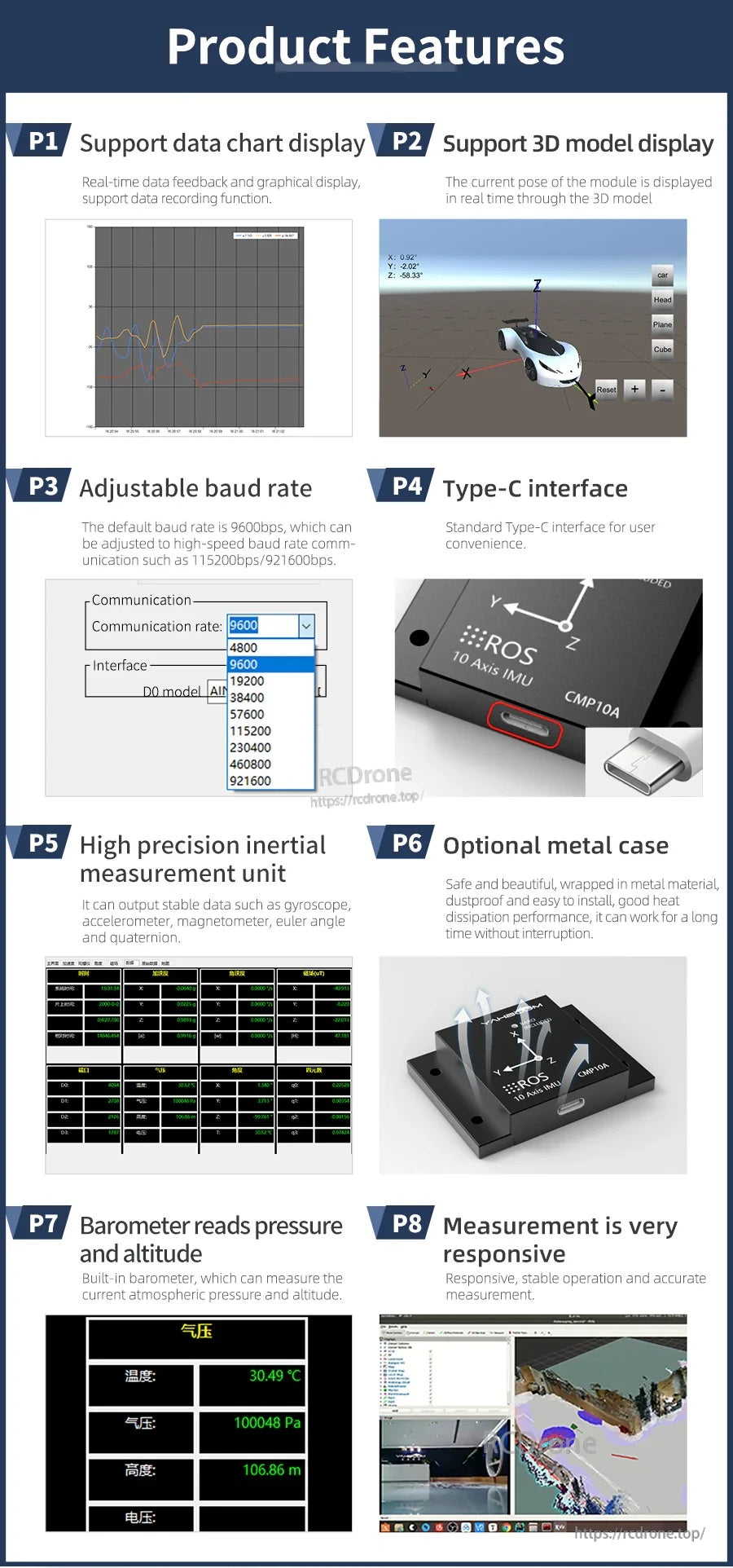
De Yahboom CMP10A 10-assige IMU ondersteunt gegevensgrafieken en 3D-modelweergave, instelbare baudrate, een Type-C interface en barometerdruk/hoogtemetingen.
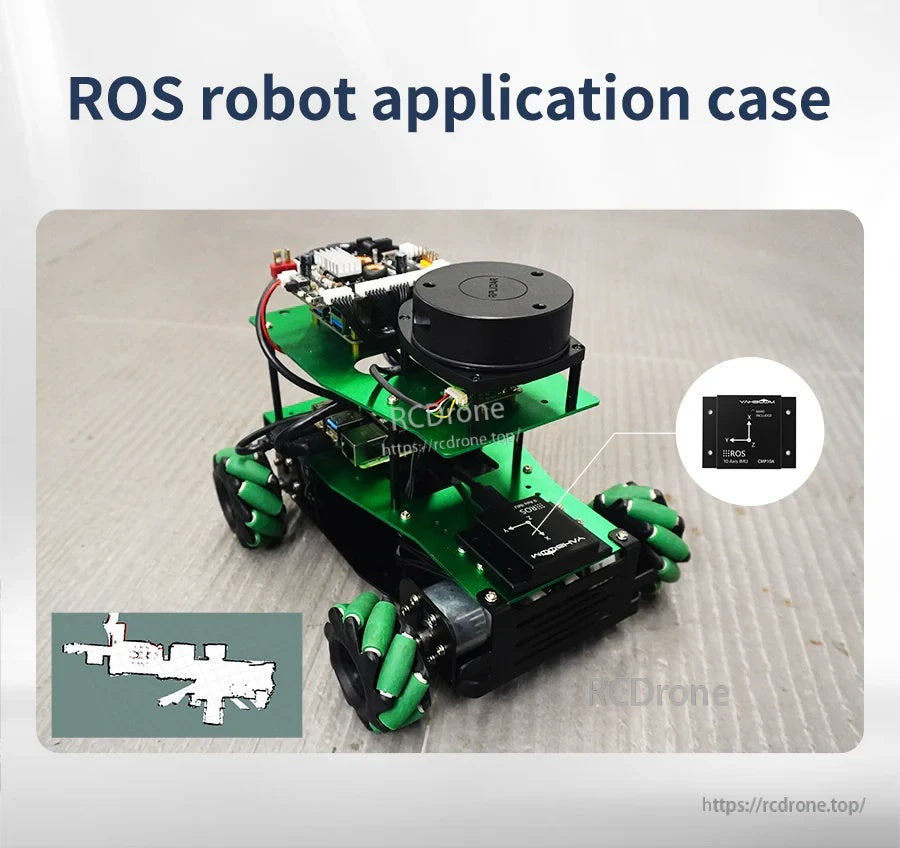
Een compacte ROS mobiele robotplatform met een boven gemonteerde lidar-module biedt een praktische referentieopstelling voor navigatie en sensorintegratie.
Yahboom CMP10A 10-assige IMU-sensorondersteuning voor Windows en Linux helpt bij integratie met Raspberry Pi, Jetson en STM32-gebaseerde projecten.

De Yahboom CMP10A 10-assige IMU-sensor is gepresenteerd voor gebruik in drones, geautomatiseerde industrie, mobiele robots en zelfrijdende autoprojecten.

De Yahboom CMP10A 10-assige IMU wordt geleverd in een compact module met montagegaten en een micro USB-interfacebord voor eenvoudige aansluiting.
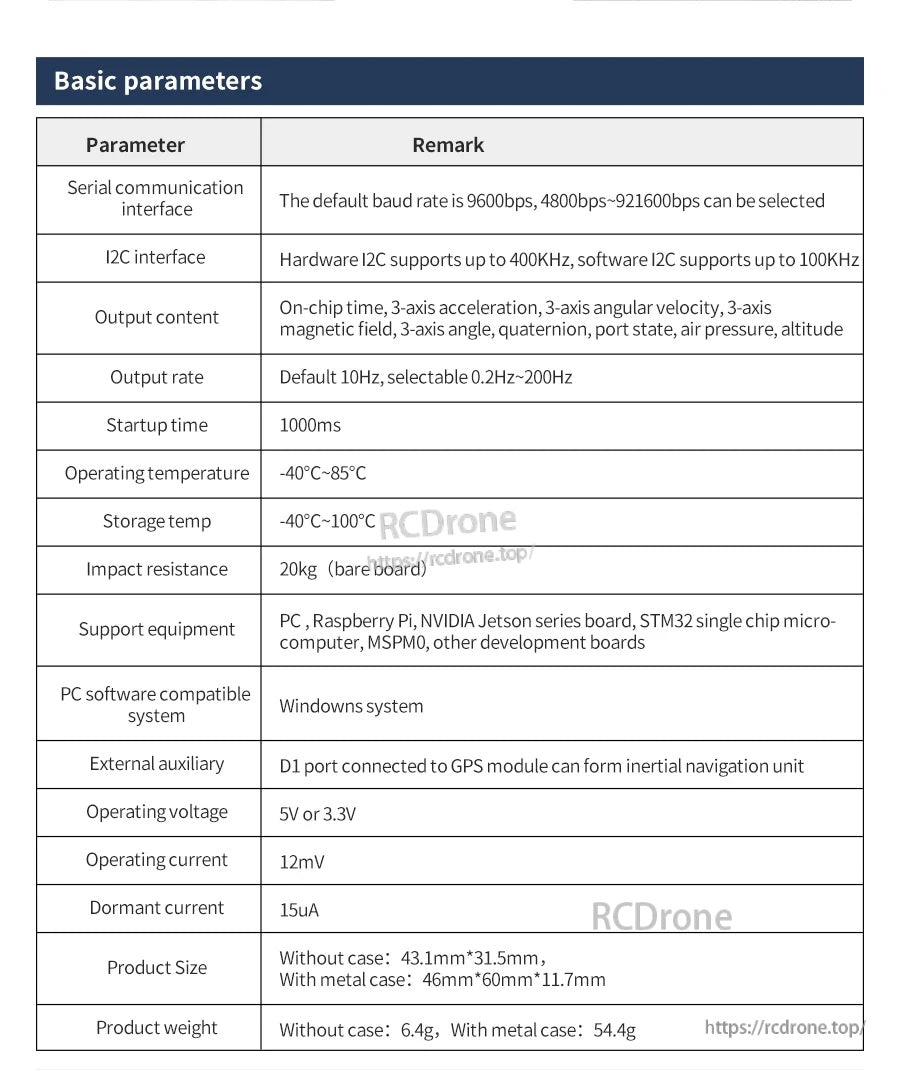
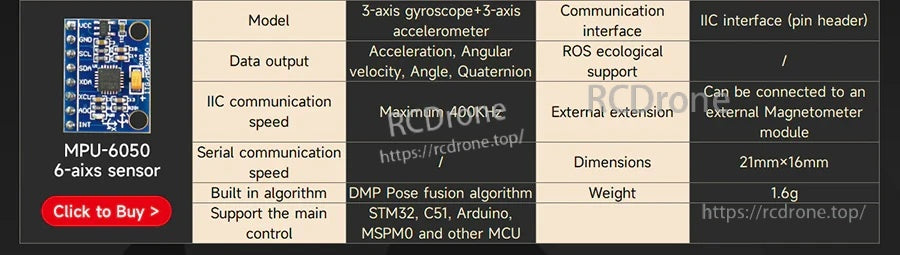
De CMP10A IMU ondersteunt I2C tot 400kHz, selecteerbare 0,2–200Hz uitvoersnelheid, en 5V of 3,3V werking voor flexibele integratie.
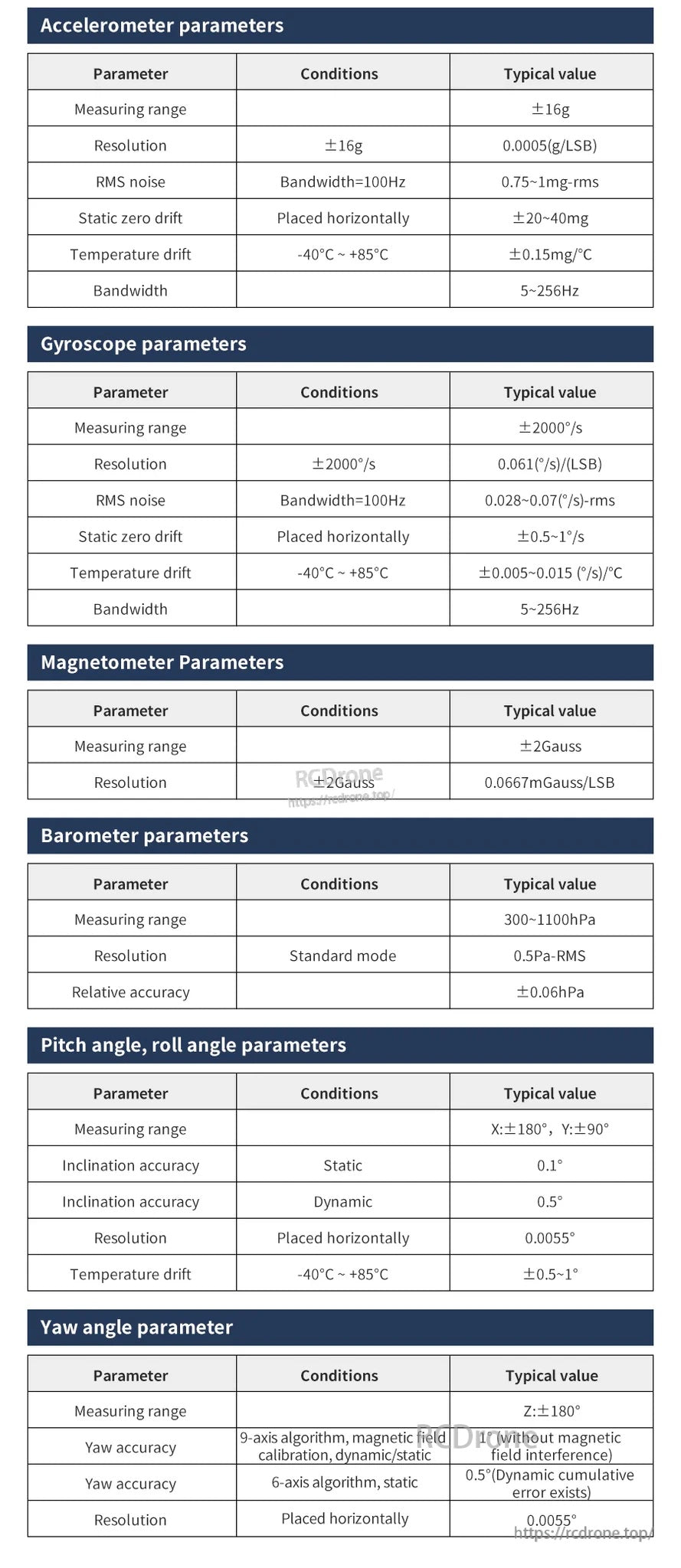
De CMP10A 10-assige IMU combineert een ±16 g versnellingsmeter, ±2000°/s gyroscoop, ±26 gauss magnetometer, en 300–1100 hPa barometer met pitch/roll/yaw hoekuitgangen.
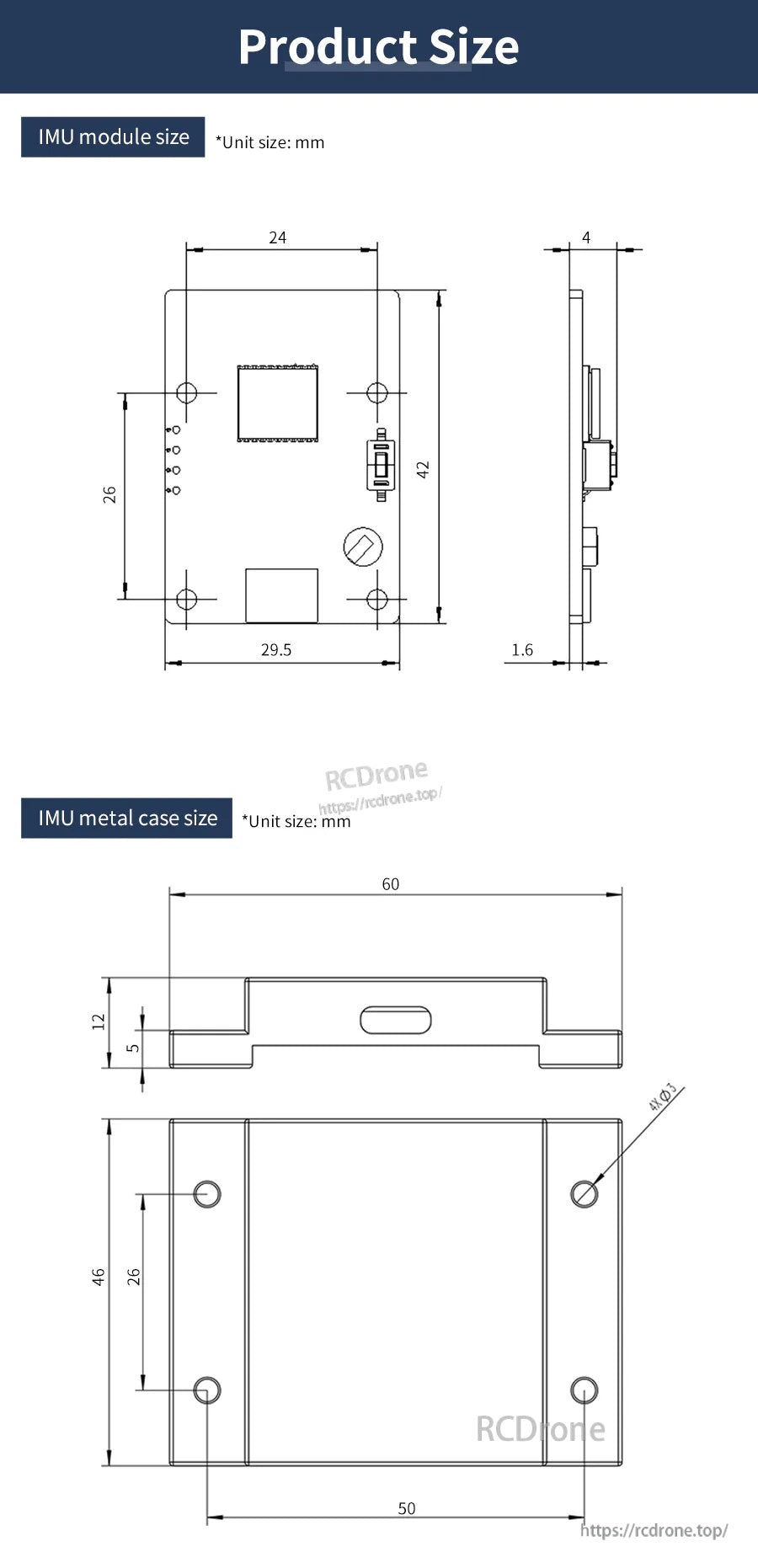
CMP10A IMU afmetingen omvatten een 29,5 mm vierkante module en een 60 × 50 mm metalen behuizing voor eenvoudigere montageplanning.
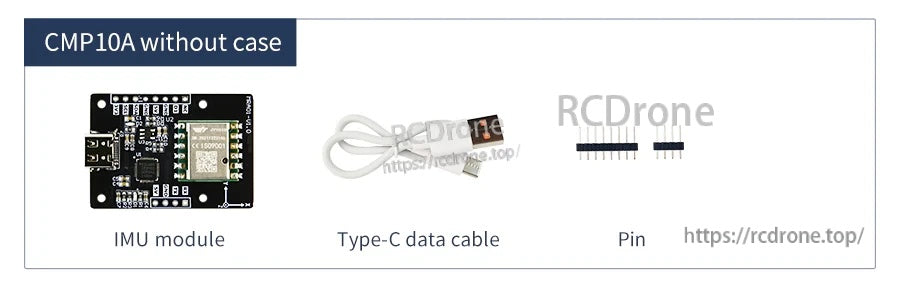
De Yahboom CMP10A IMU-module wordt geleverd met een USB‑C datakabel en pinheaders voor eenvoudig prototypen en bedrading.
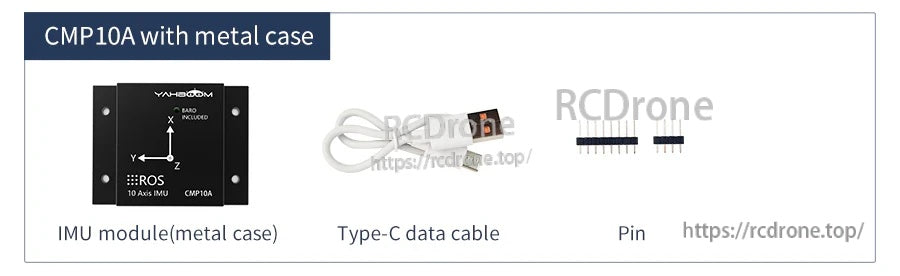
De Yahboom CMP10A IMU-kit bevat een metalen behuizing sensor module met een USB-C datakabel en pinheaders voor bedrading.

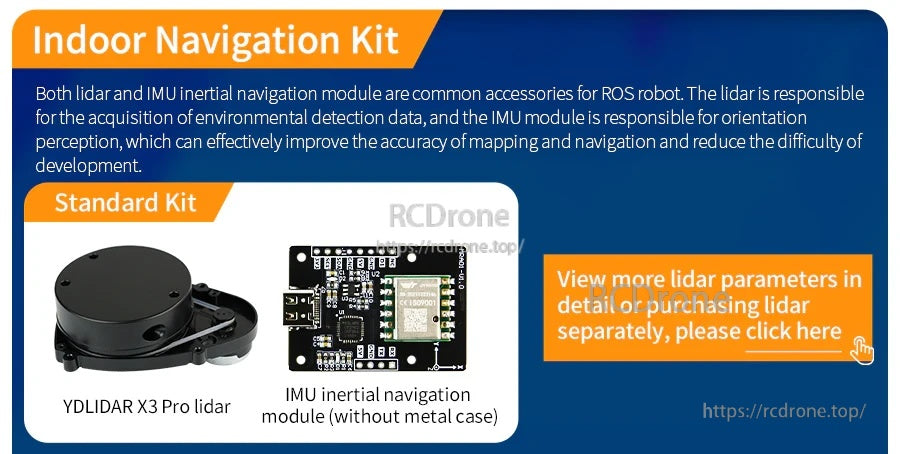
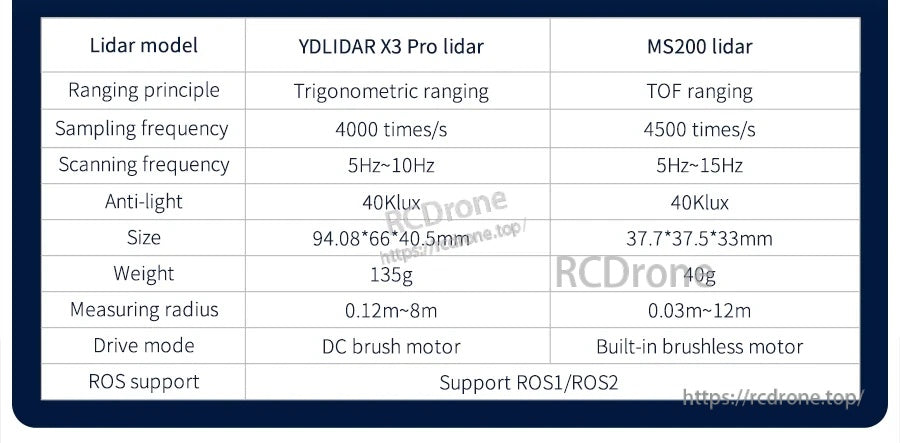
De CMP10A IMU-module wordt gebundeld met een YDLIDAR X3 Pro lidar, seriële poort adapterbord, pinheaders, en een Type‑C datakabel voor indoor navigatie-opstellingen.
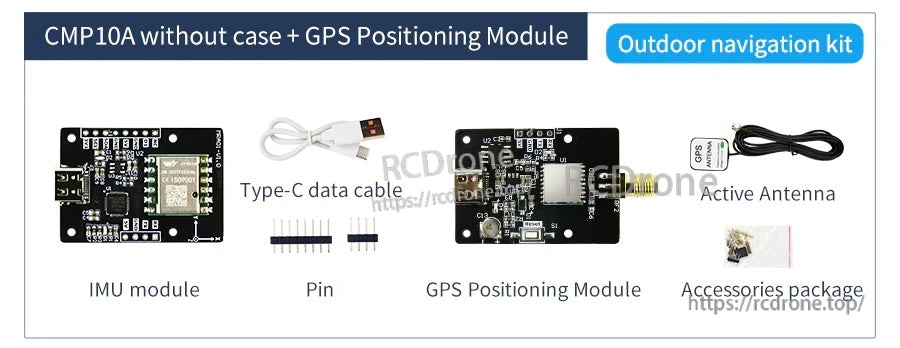
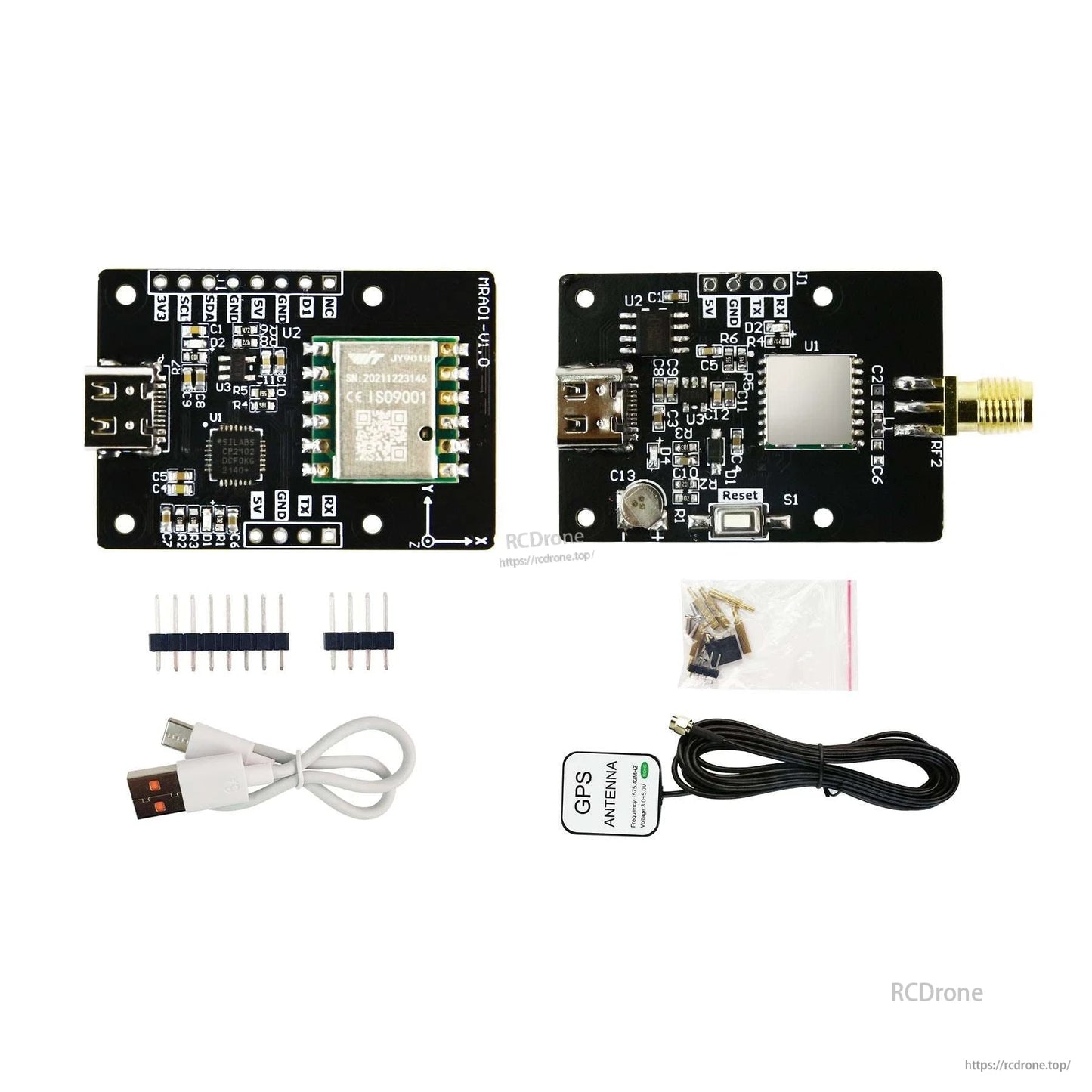
De Yahboom CMP10A IMU-sensor kit bevat een IMU-module, GPS-positioneringsmodule, Type‑C datakabel, pinnen en een actieve antenne voor outdoor navigatieprojecten.
Related Collections