











Yahboom ROSMASTER X3 PLUS ROS Robot met Mecanum-wielen & 6DOF Arm voor Jetson Nano 4GB/Orin SUPER/RPi 5
Yahboom ROSMASTER X3 PLUS ROS Robot met Mecanum-wielen & 6DOF Arm voor Jetson Nano 4GB/Orin SUPER/RPi 5
Yahboom
Kan beschikbaarheid voor afhalen niet laden
Overzicht
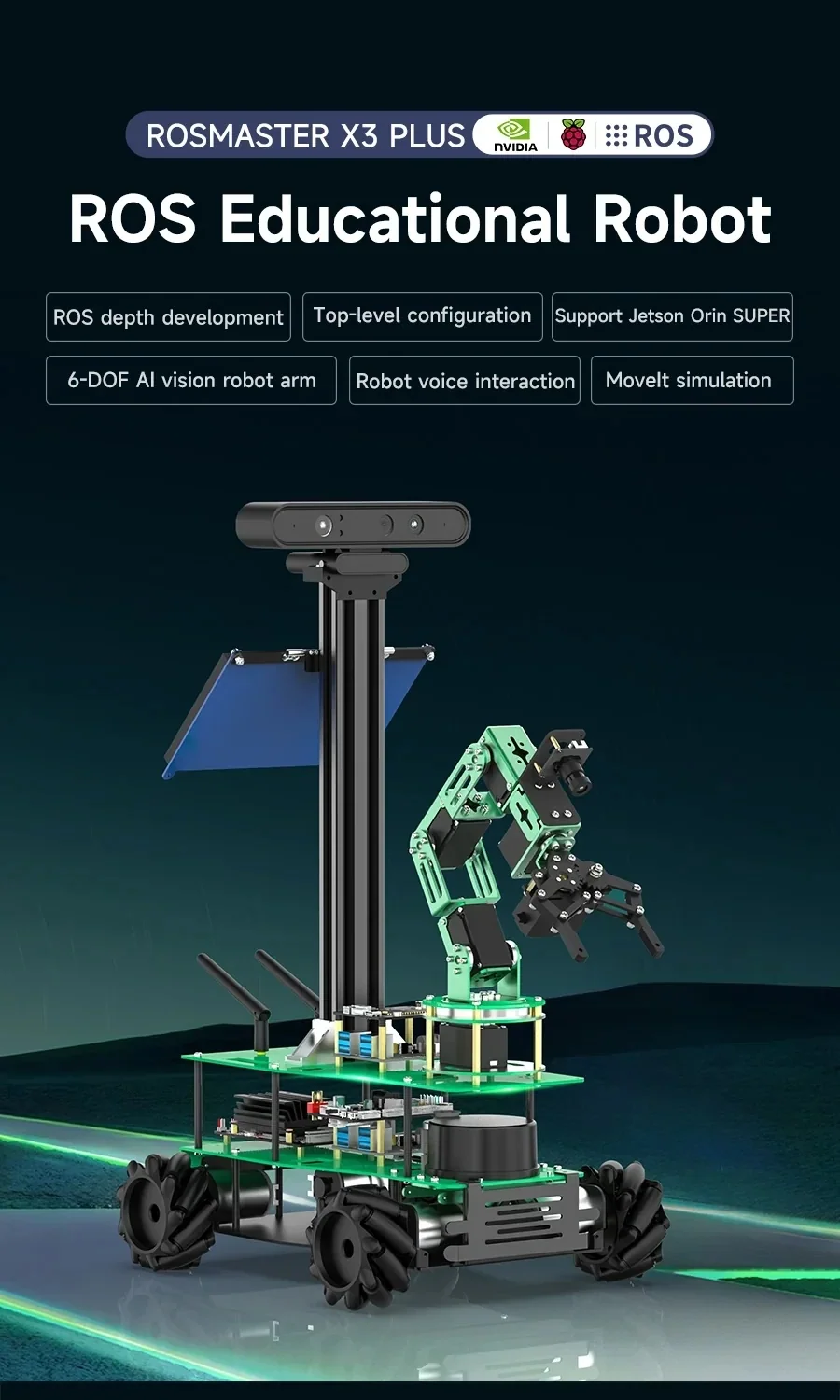
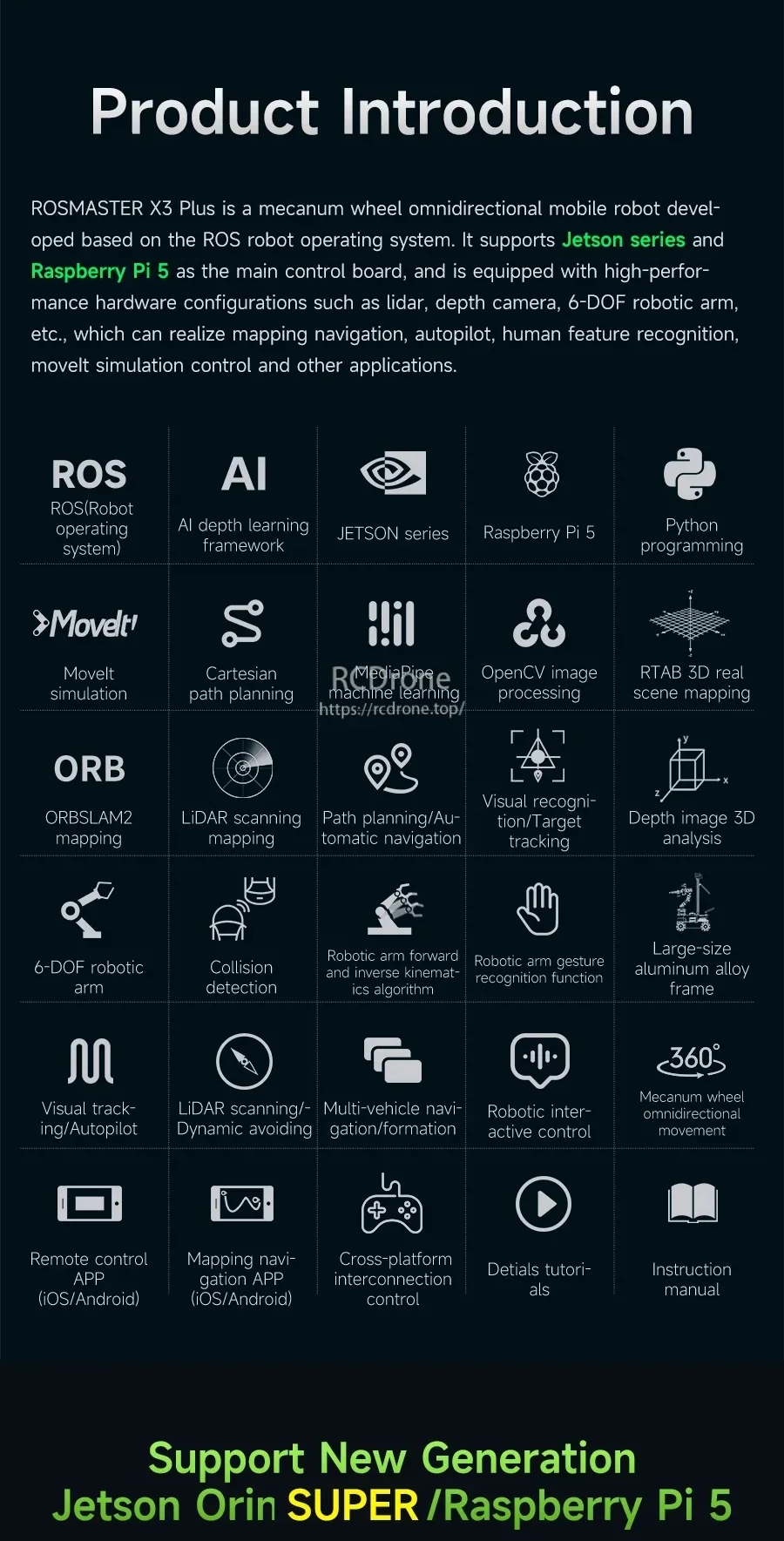
Yahboom ROSMASTER X3 PLUS is een ROS-robot (ROS educatieve robot) met mecanum-wiel omnidirectionele beweging, ontwikkeld op het ROS-robotbesturingssysteem. Het ondersteunt vier controllers: Jetson NANO 4GB, Jetson Orin NX SUPER, Jetson Orin NANO SUPER en Raspberry Pi 5. Het platform integreert LiDAR, een dieptecamera, een 6DOF robotarm, een spraakherkenningsinteractiemodule, 520 encoder reductiemotoren en een HD 7-inch touchscreen voor ROS-ontwikkeling en AI/vision leerworkflows zoals mapping en navigatie, menselijke kenmerkherkenning en MoveIt simulatie/besturing.
Belangrijkste Kenmerken
- Omnidirectionele mecanum-wiel mobiele basis met pendulum ophangchassis
- 6-DOF AI vision robotarm en MoveIt simulatie/besturing ondersteuning
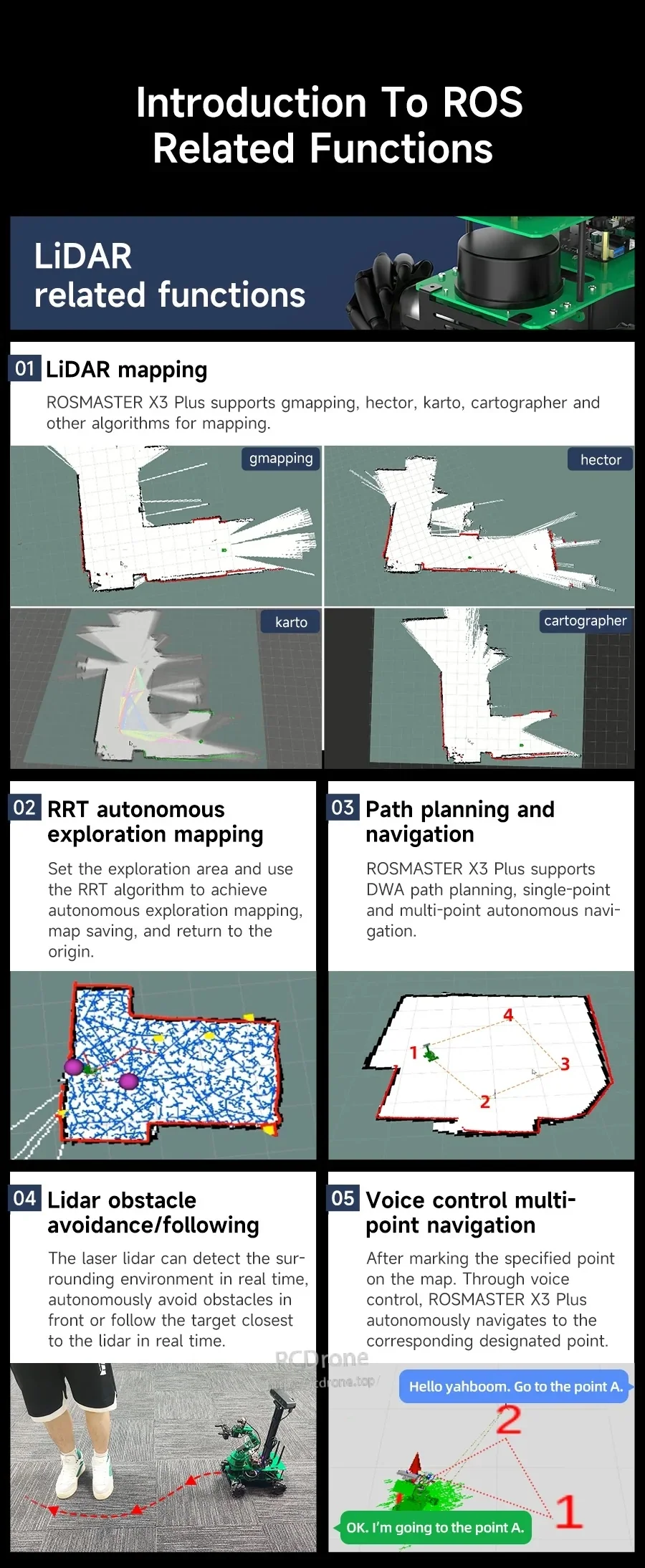
- LiDAR SLAM, padplanning en navigatieworkflows (inclusief gmapping/hector/karto/cartographer ondersteuning zoals gelabeld)
- Dieptecamera functies inclusief puntenwolk, ORB-SLAM2 + Octomap mapping, en RTAB-Map 3D visuele mapping/navigatie
- Robot steminteractiemodule voor spraakbesturing van beweging en navigatie (zoals vermeld)
- Meerdere bedieningsmethoden ondersteund: mobiele telefoon, handvat en computer toetsenbord; ook VNC/Jupyter/SSH opties voor externe besturing zijn vermeld
- De meeste structurele onderdelen zijn vooraf gemonteerd; na ontvangst is alleen de installatie/verbinding van de hoofdregelkaart nodig om het te gebruiken
Specificaties
Robot Platform
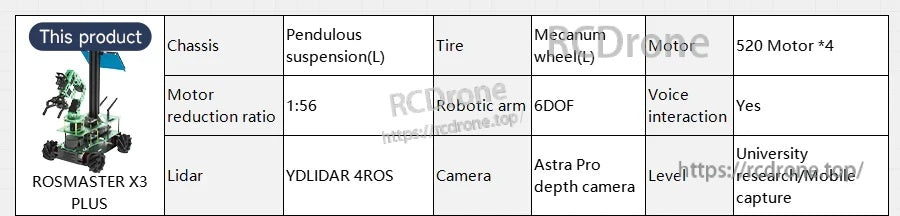
| Robotmodel | ROSMASTER X3 PLUS |
| Beweging | Mecanum wiel omnidirectionele beweging (360 graden) |
| Chassis | Aluminiumlegering chassis; groot formaat aluminiumlegering frame |
| Ophanging | Pendule ophanging (L) |
| Band / wiel | Mecanum wiel (L) |
| Aandrijfmotoren | 520 motor x4 (520 encoder reductiemotor is gelabeld) |
| Motor reductieverhouding | 1:56 |
| Robotarm | 6DOF |
| Spraakinteractie | Ja |
| LiDAR | YDLIDAR 4ROS |
| Dieptecamera | Astra Pro dieptecamera (Astra Pro Plus dieptecamera is ook gelabeld) |
| Scherm | 7-inch HD touchscreen |
| Niveau (zoals gelabeld) | Universitair onderzoek / Mobiele opname |
Hoofdcontrolebordopties (zoals vermeld)
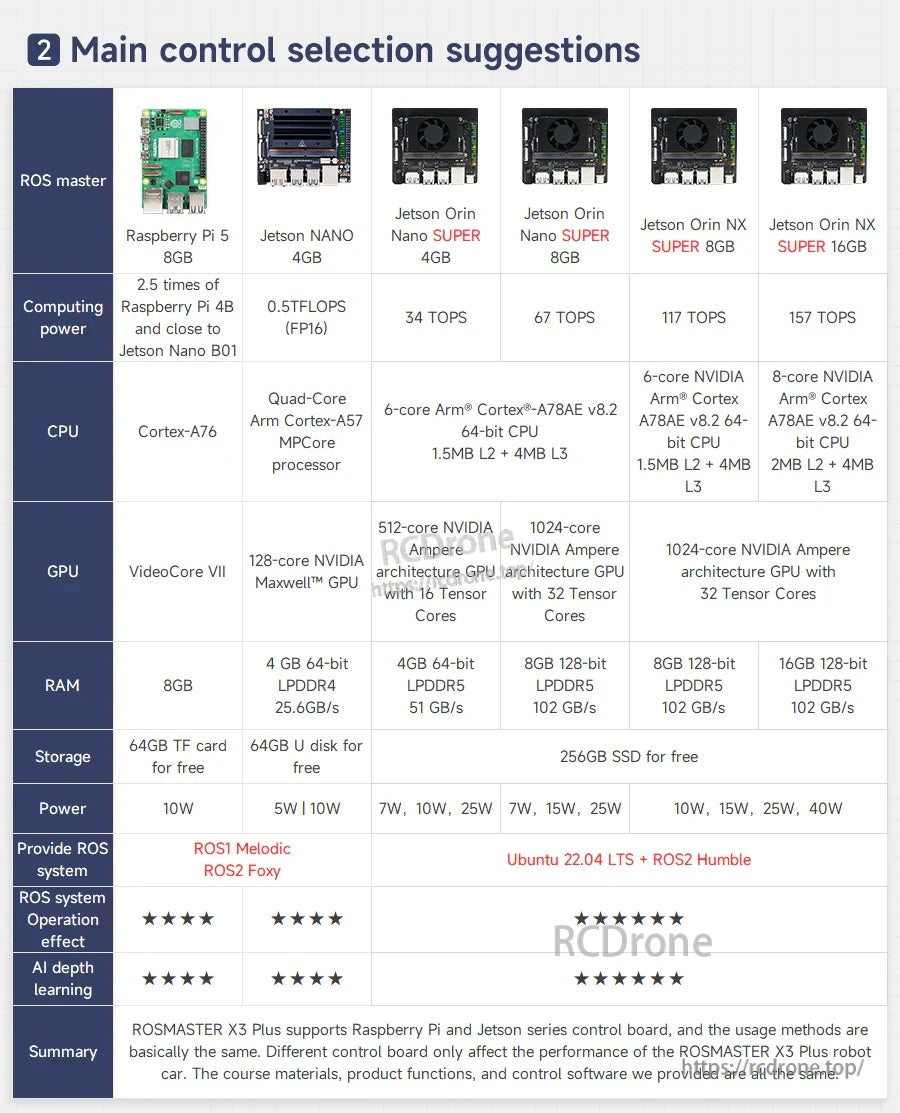
| ROS hoofdcontrole | Raspberry Pi 5 8GB | Jetson NANO 4GB | Jetson Orin Nano SUPER 4GB | Jetson Orin Nano SUPER 8GB | Jetson Orin NX SUPER 8GB | Jetson Orin NX SUPER 16GB |
|---|---|---|---|---|---|---|
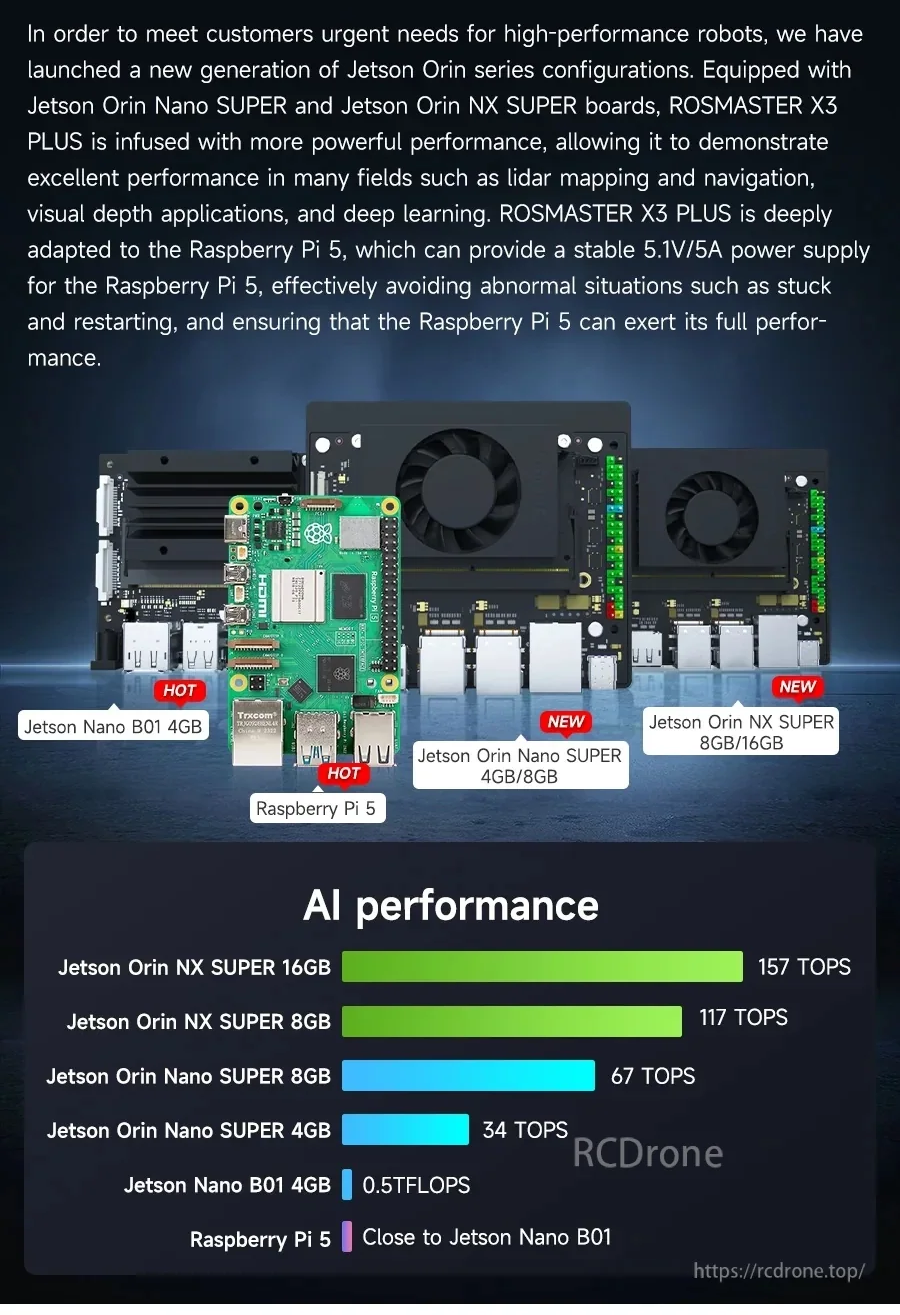
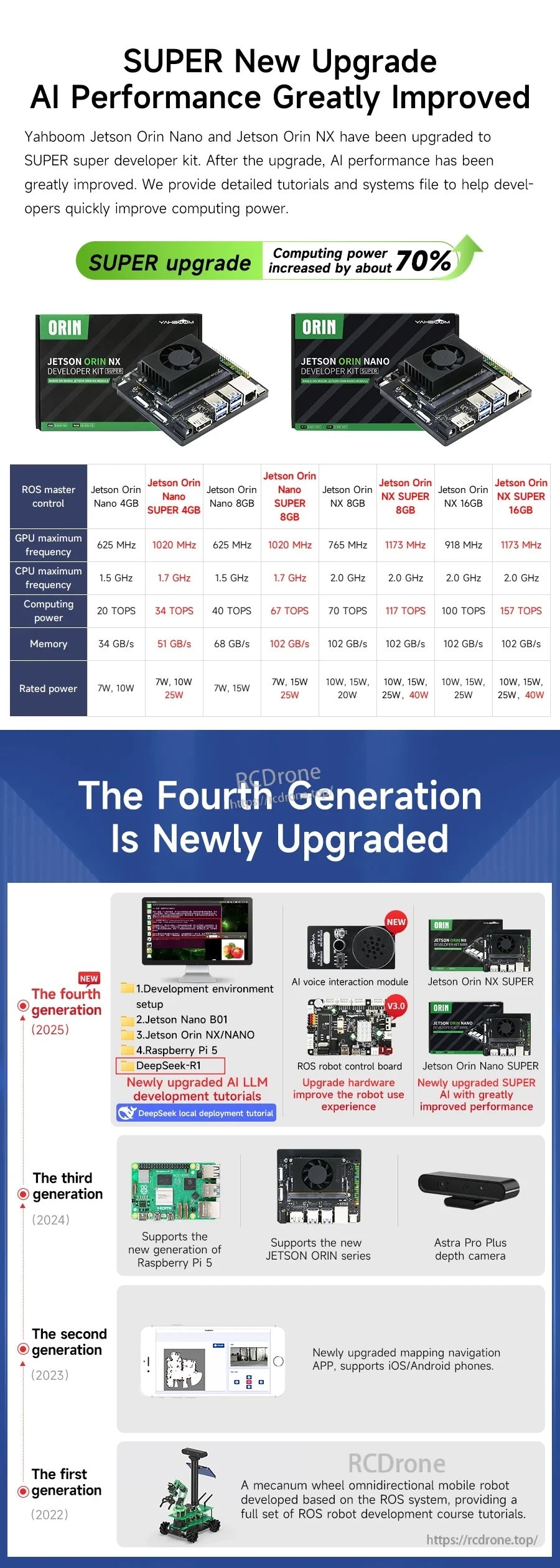
| Rekenkracht | 2.5 keer Raspberry Pi 4B en vergelijkbaar met Jetson Nano B01 | 0.5 TFLOPS (FP16) | 34 TOPS | 67 TOPS | 117 TOPS | 157 TOPS |
| CPU | Cortex-A76 | Quad-Core Arm Cortex-A57 MPCore processor | 6-core Arm Cortex-A78AE v8.2 64-bit CPU; 1.5MB L2 + 4MB L3 | 6-core Arm Cortex-A78AE v8.2 64-bit CPU; 1.5MB L2 + 4MB L3 | 6-core NVIDIA Arm Cortex-A78AE v8.2 64-bit CPU; 1.5MB L2 + 4MB L3 | 8-core NVIDIA Arm Cortex-A78AE v8.2 64-bit CPU; 2MB L2 + 4MB L3 |
| GPU | VideoCore VII | 128-core NVIDIA Maxwell GPU | 512-core NVIDIA Ampere architectuur GPU met 16 Tensor Cores | 1024-core NVIDIA Ampere architectuur GPU met 32 Tensor Cores | 1024-core NVIDIA Ampere architectuur GPU met 32 Tensor Cores | 1024-core NVIDIA Ampere architectuur GPU met 32 Tensor Cores |
| RAM | 8GB | 4 GB 64-bit LPDDR4 25.6GB/s | 4GB 64-bit LPDDR5 51 GB/s | 8GB 128-bit LPDDR5 102 GB/s | 8GB 128-bit LPDDR5 102 GB/s | 16GB 128-bit LPDDR5 102 GB/s |
| Opslag (zoals vermeld) | 64GB TF-kaart gratis | 64GB U-schijf gratis | 256GB SSD gratis | |||
| Vermogen | 10W | 5W | 10W | 7W, 10W, 25W | 7W, 15W, 25W | 10W, 15W, 25W, 40W | 10W, 15W, 25W, 40W |
| Geleverd ROS-systeem (zoals vermeld) | ROS1 Melodic; ROS2 Foxy | ROS1 Melodic; ROS2 Foxy | Ubuntu 22.04 LTS + ROS2 Humble | |||
ROSMASTER X3 PLUS is diep aangepast aan Raspberry Pi 5 en kan een stabiele 5.1V/5A stroomvoorziening bieden voor Raspberry Pi 5 (zoals beschreven).
Functielijst
Dieptecamera
- Realtime webmonitoring
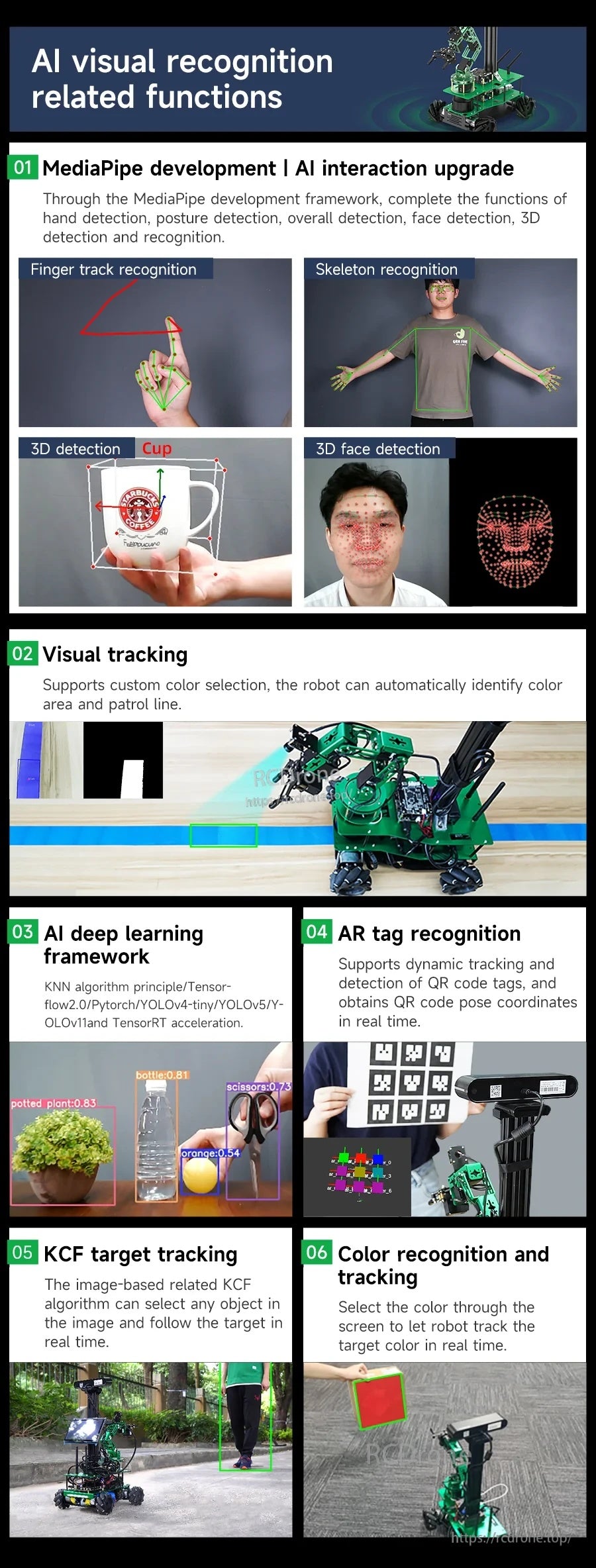
- ArTag pose schatting
- AR speciale effecten
- QR-code creatie
- QR-code herkenning
- Skeletdetectie
- Vinger volgen
- Camerakalibratie
- MediaPipe ontwikkeling
- Kleurtracking
- KCF objecttracking
- Visuele tracking
- ORBSLAM2 mapping
- ORBSLAM2 + Octomap
- Rtabmap 3D mapping
- Rtabmap 3D navigatie
- yolov4-tiny objectherkenning
- yolov5 + TensorRT objectherkenning
- yolov11 + TensorRT objectherkenning
- yolov5 om verkeersborden te trainen
- TensorRT om bordenherkenning te versnellen
YDLIDAR 4ROS LiDAR
- Mapping mapping algoritme
- Hector mapping algoritme
- Karto mapping algoritme
- Cartographer mapping algoritme
- RRT verkenning mapping
- LiDAR vaste-punt navigatie
- LiDAR multi-punt navigatie
- TEB en DWA padplanning
- LiDAR obstakelvermijding
- LiDAR tracking
- LiDAR bewaking
- LiDAR patrouille
- ROS APP mapping
- ROS APP navigatie
- Multi-voertuig navigatie
- Multi-voertuig formatie
- Multi-voertuig omringen
6DOF Robotarm
- MoveIt configuratie
- MoveIt bedient de echte machine
- MoveIt beweegt willekeurig
- MoveIt kinematica ontwerp
- MoveIt cartesiaans pad
- MoveIt vermijden
- MoveIt sensing
- MoveIt trajectplanning
- MediaPipe palm controle auto
- MediaPipe gebaarbesturing robotarm
- MediaPipe gebaarbesturing auto
- MediaPipe armhoudingbesturing robotarm
- MediaPipe herkent en volgt palmbesturing robotarm
- Herkent kleurblok en handling
- Autopilot om obstakels te vermijden
AI Spraakinteractiemodule
- Introductie van spraakmodule en poortbinding
- Commando activering
- Spraakbesturing autobeweging
- Spraakbesturing autopilot
- Spraakbesturing kleurherkenning
- Spraakbesturing kleurtracking
- Spraakbesturing multi-point navigatie
- Robotarm spraakfuncties
ROS Robot Uitbreidingsbord
- Seriële communicatie
- Servo besturen
- 9-assige houdingssensor
- Accuspanning detectie
- CAN-bus communicatie
- SBUS modelvliegtuig afstandsbediening
- Buzzer besturen
- Bedien RGB-lichtbalk
ROS Master Control (zoals vermeld)
- VNC afstandsbediening
- Jupyter lab afstandsbediening
- SSH afstandsbediening
- Toetsenbordbediening
- Handgreepbediening
- APP zwaartekrachtsensorbediening
- APP beeldtransmissie en softwarebediening
- Multi-machine communicatieconfiguratie
- GPU-versnelling*
- TensorRT-versnelling*
- Robot seriële poortcommunicatie
- IMU- en odometergegevens vrijgave
- Stel statisch IP of hotspotmodus in
- qr real-time PID-regeling
- Lineaire snelheid en hoeksnelheid zijn nauwkeuriger
- OLED-schermweergave
Opmerking: Items gemarkeerd met * geven aan dat alleen Jetson-serie besturingsborden beschikbaar zijn.
Toepassingen
- APP-mapping en navigatie (iOS/Android zijn vermeld)
- LiDAR-scanning mapping en autonome navigatie (enkelpunt- en multipuntnavigatie zijn vermeld)
- RTAB-Map 3D visuele mapping navigatie en globale relocalisatie (zoals beschreven)
- Herkenning van menselijke kenmerken en visuele tracking (zoals beschreven/vermeld)
- MoveIt robotarm simulatiebesturing en kinematica/padplanning leren
- Multi-machine synchrone besturing en multi-voertuig navigatie/formatie (zoals vermeld)
Handleidingen & Video
Handleiding link (officieel): http://www.yahboom.net/study/ROSMASTER-X3-PLUS
Voor configuratieselectie of technische ondersteuning voor aankoop, neem contact op met https://rcdrone.top/ of e-mail [email protected].
Details

ROSMASTER X3 PLUS combineert een omnidirectionele mecanum-basis met LiDAR, een dieptecamera en een 6-DOF-arm voor ROS-leren.
Kies een hoofdcontroller—Raspberry Pi 5 of NVIDIA Jetson-opties—om aan uw ROS-prestaties en AI-werkbelastingbehoeften te voldoen.
Belangrijke hardware-hoogtepunten zijn onder meer mecanum-wielen met slingerophanging, een 6-DOF-arm en YDLIDAR-gebaseerde SLAM-ondersteuning.
Details over controllerselectie helpen bij het plannen van rekenkracht, geheugen en stroom voor taken zoals mapping, navigatie en vision-pijplijnen.

Overzicht van accessoires behandelt de meegeleverde sensor- en interactiehardware die wordt gebruikt in de ROS-tutorials en demo's.

Het grote chassis van aluminiumlegering en de slingerophanging verbeteren het wielcontact op oneffen oppervlakken voor soepelere bewegingscontrole.
LiDAR-workflows ondersteunen mapping en navigatie, inclusief gebruikelijke SLAM-stacks en padplanning voor autonoom rijden.
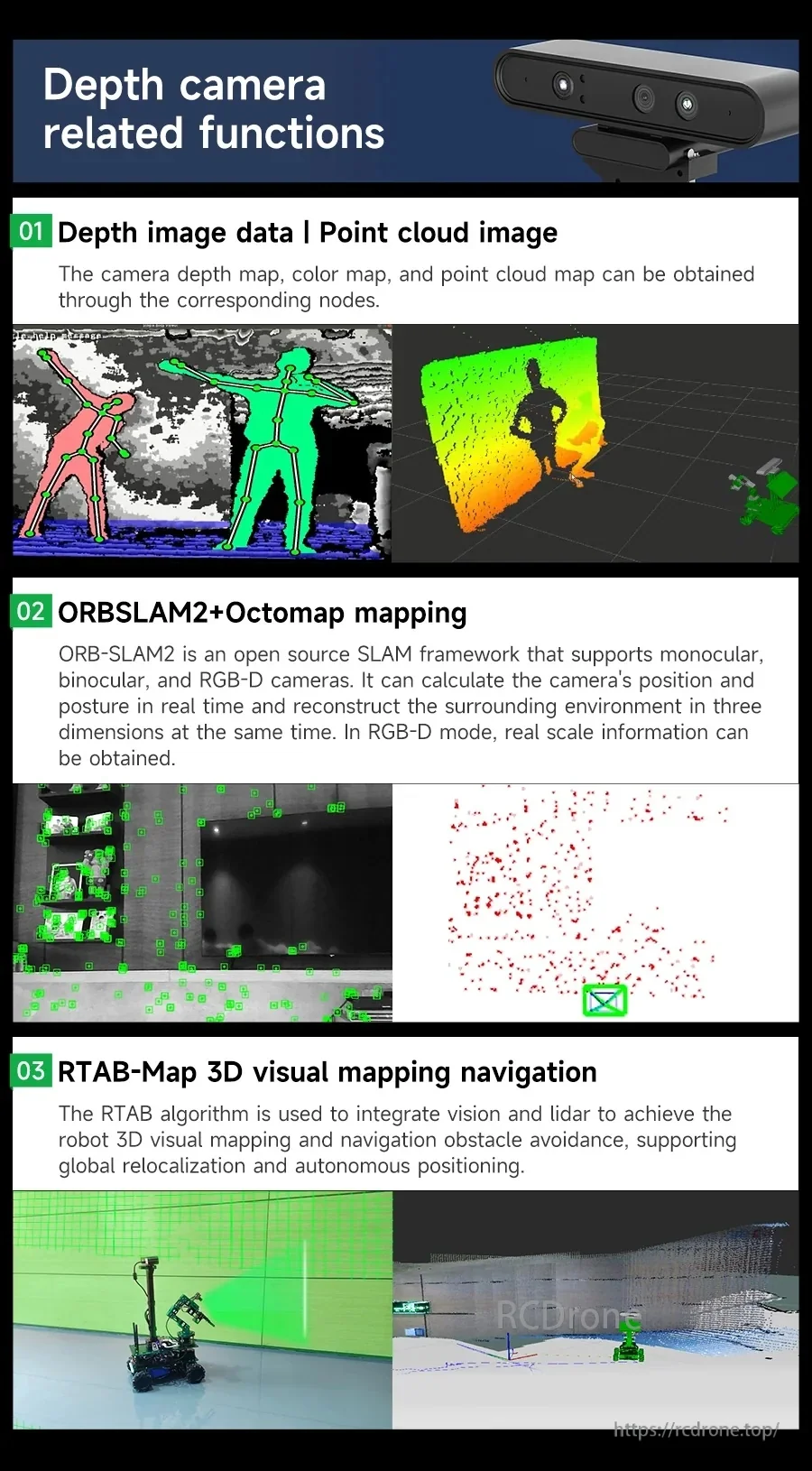
Dieptecamera-pijplijnen maken puntwolken en 3D-mappingopties mogelijk zoals ORB‑SLAM2 + Octomap en RTAB‑Map.
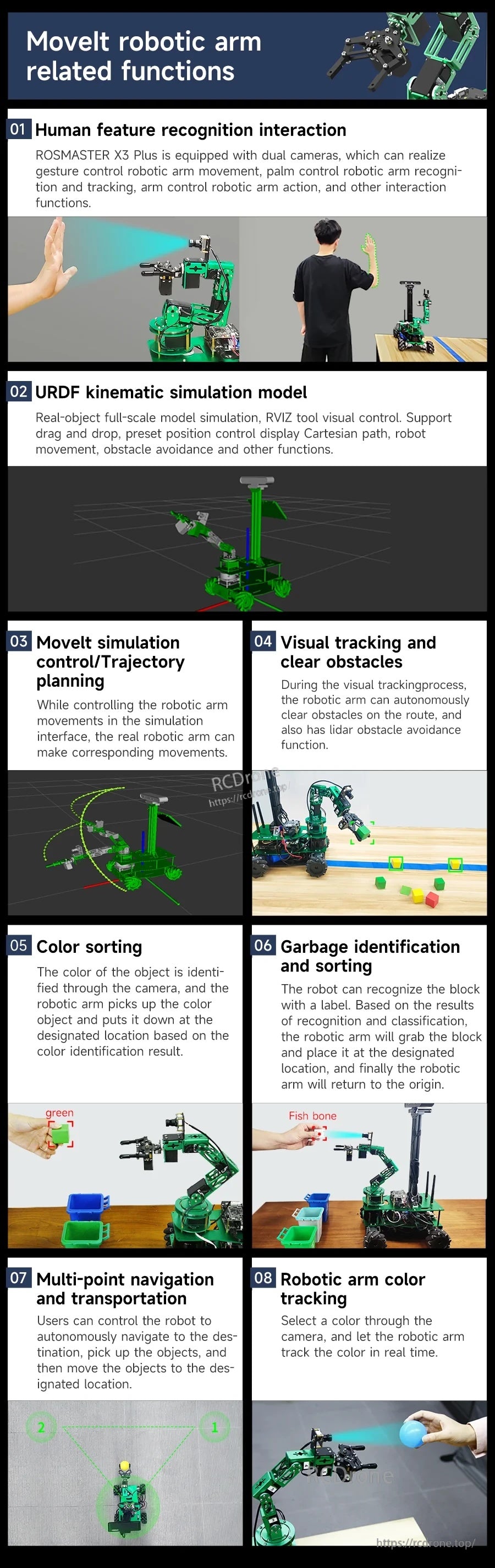
MoveIt-gerichte armvoorbeelden behandelen kinematica (URDF), grijptaken, tracking en praktische pick-and-place-oefeningen.

Er zijn meerdere bedieningsopties beschikbaar, inclusief methoden voor externe toegang, formatie/coördinatiedemo's en spraakinteractie.
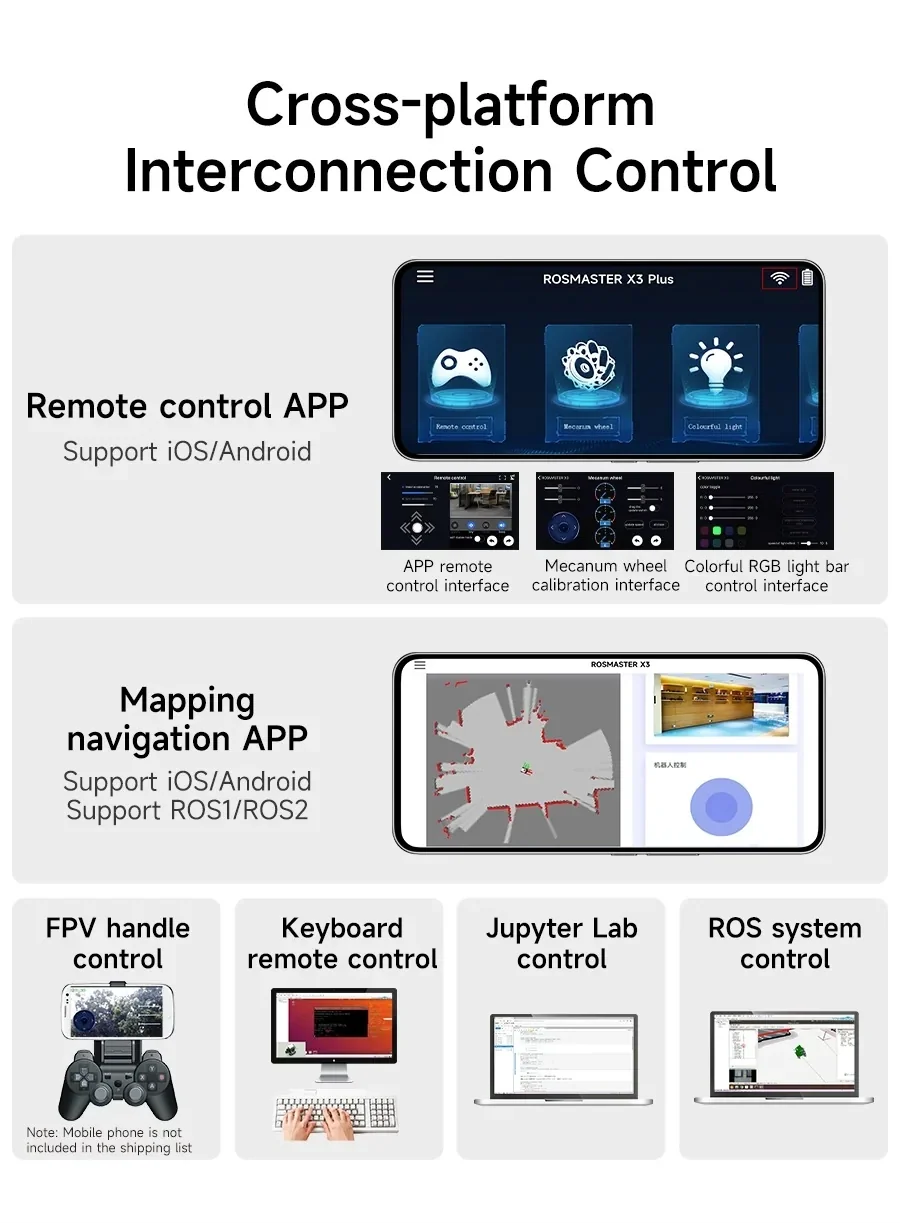
ROSMASTER X3 Plus ondersteunt cross-platform besturing via iOS/Android remote en mapping-apps, plus toetsenbord, Jupyter Lab en ROS-systeeminterfaces.
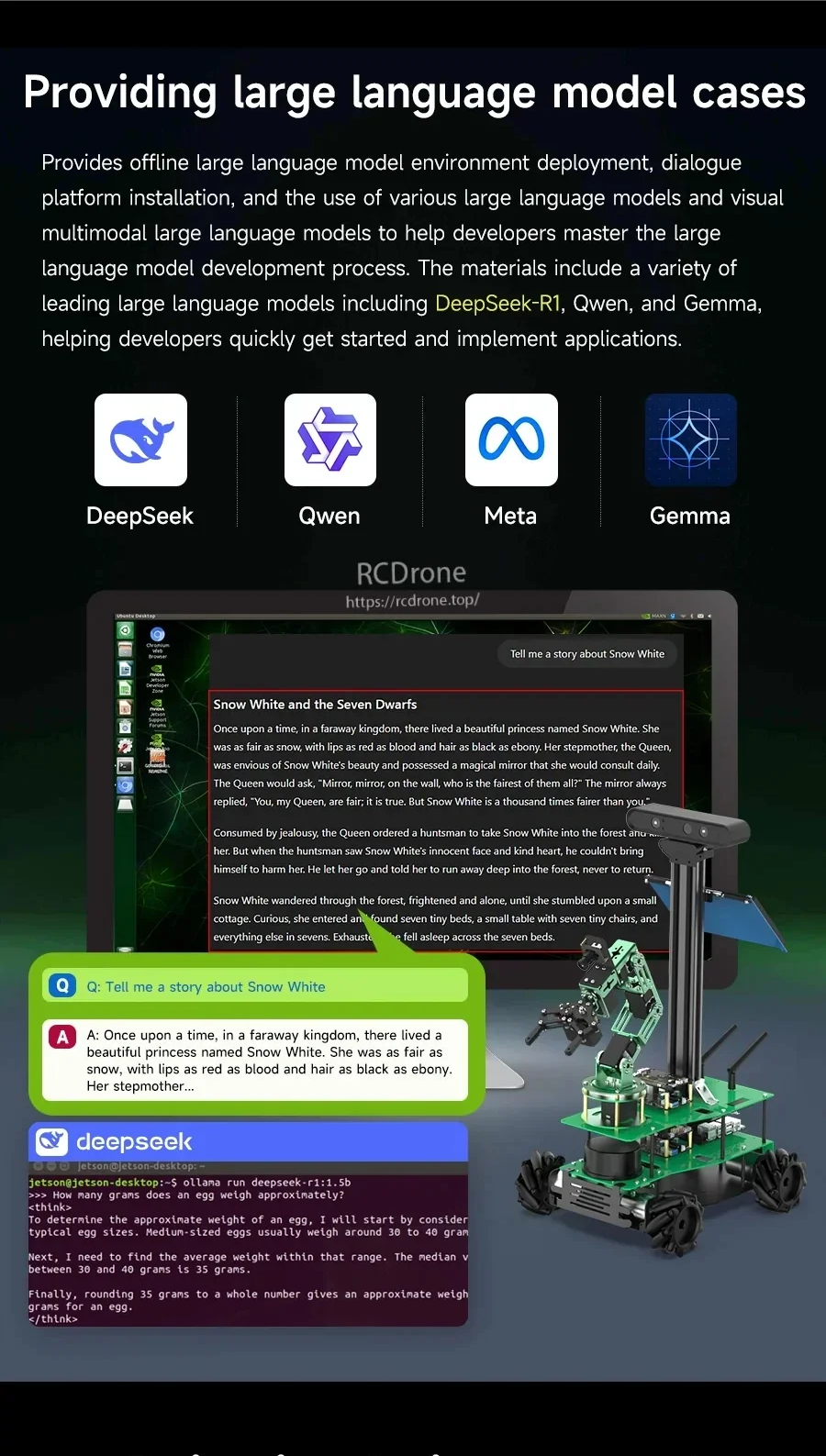
De ROS-robotkit bevat demo-cases van grote taalmodellen om ontwikkelaars te helpen starten met platforms zoals DeepSeek, Qwen, Meta en Gemma.
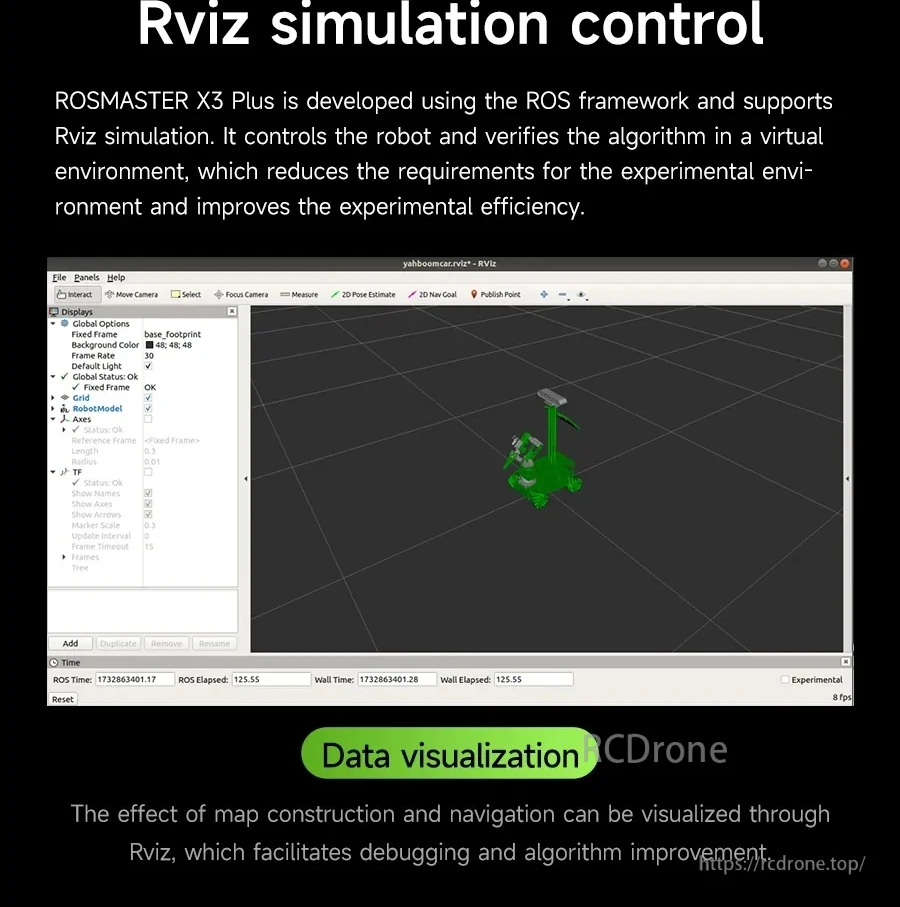
ROSMASTER X3 Plus ondersteunt RViz-simulatiecontrole en datavisualisatie om te helpen bij algoritmetesten en foutopsporing.
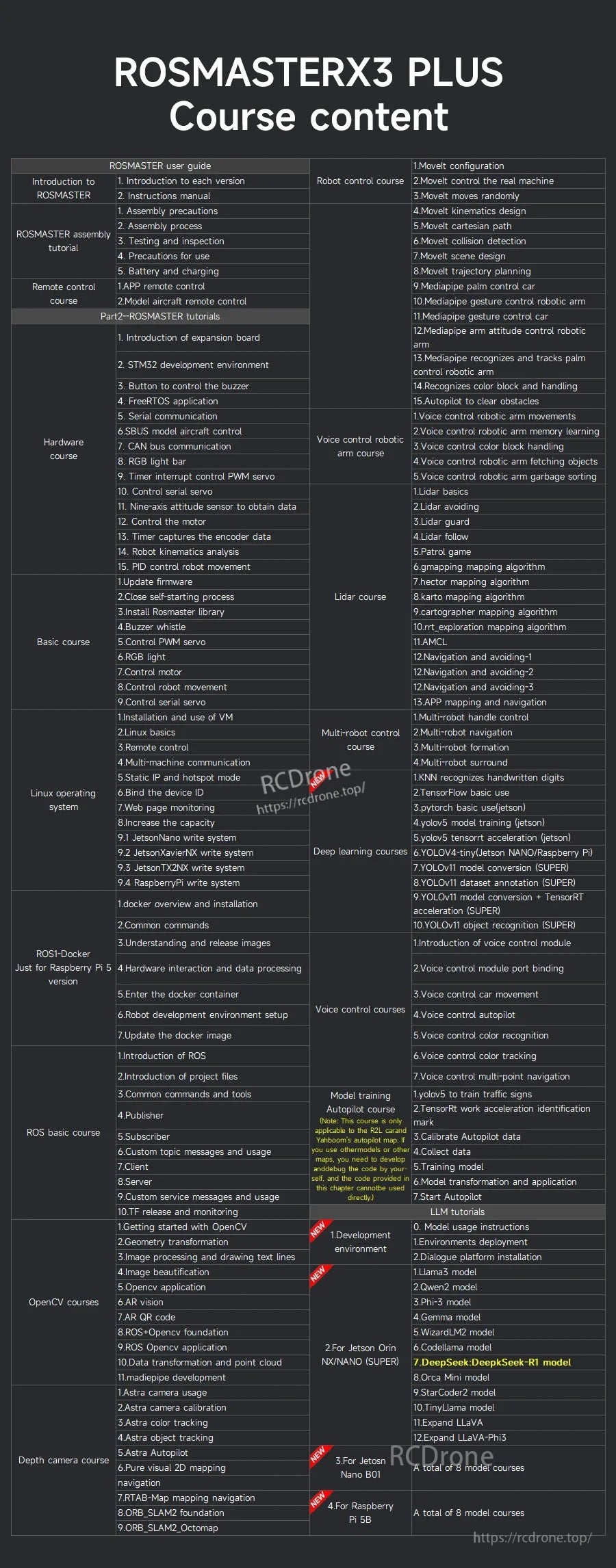
De cursusinhoud van de ROSMASTER X3 PLUS beschrijft de installatie, montage en een gestructureerde set van ROS-programmeer- en roboticalessen.
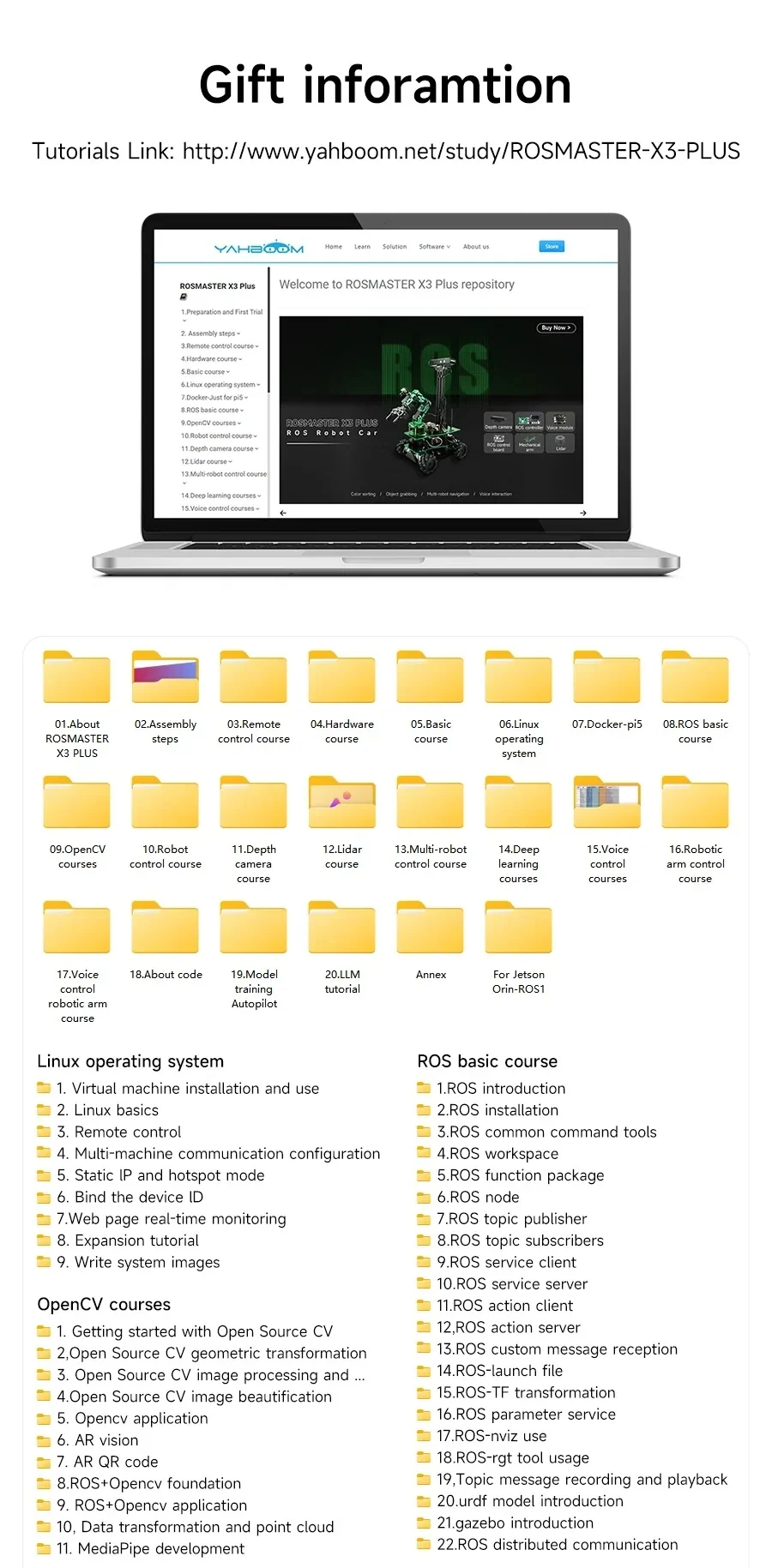
Yahboom ROSMASTER X3 PLUS omvat toegang tot tutorials en cursusmateriaal over Linux-basisprincipes, OpenCV en ROS-installatie en -tools.
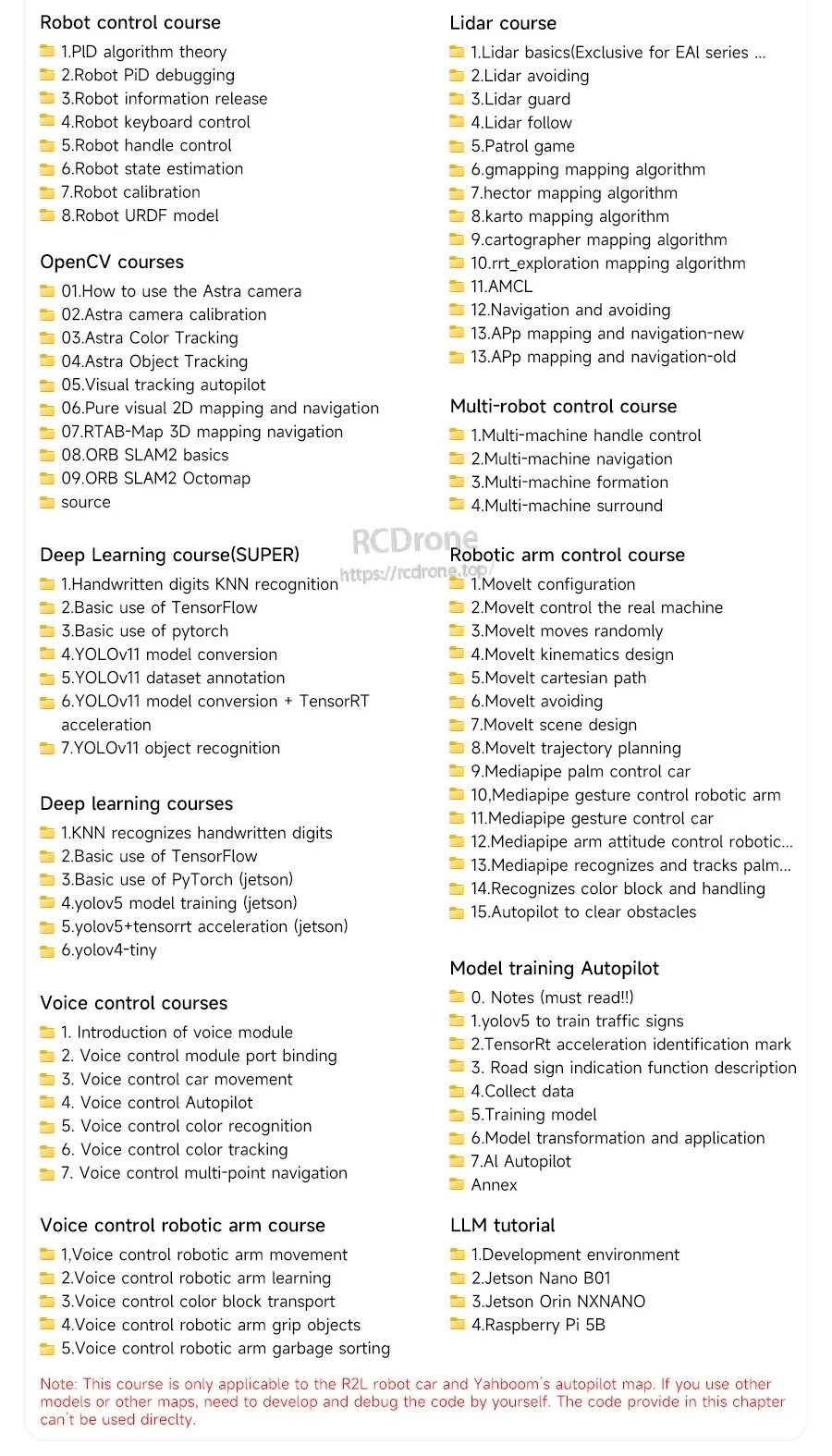
De leerinhoud van de ROSMASTER X3 PLUS behandelt de basisprincipes van robotbesturing plus lidar-mapping, multi-robotbesturing, deep learning en spraakinteractiemodules.
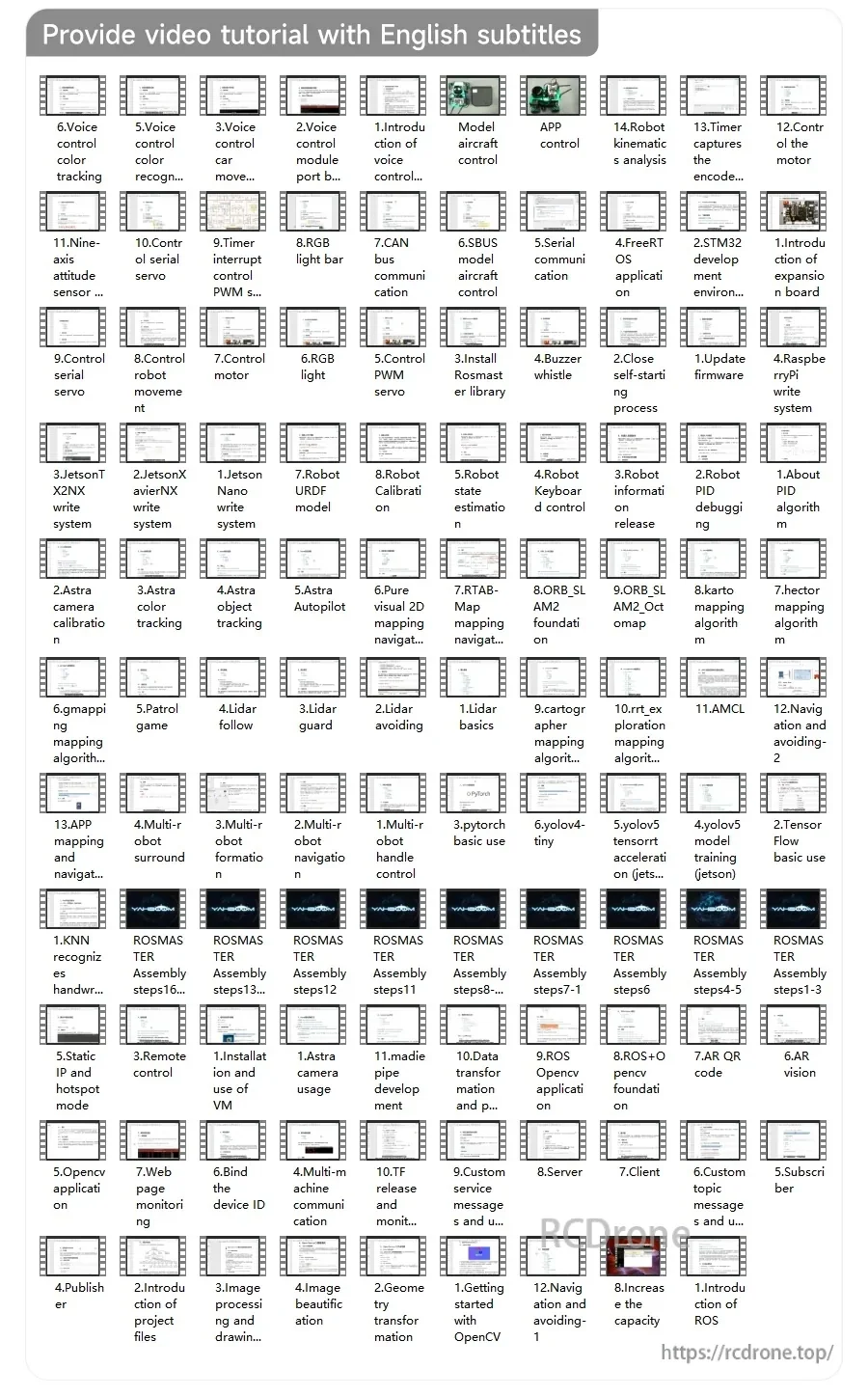
De ROSMASTER X3 PLUS bevat Engelstalige ondertitelde videotutorials over installatie, modules, sensoren en ROS-leerprojecten.
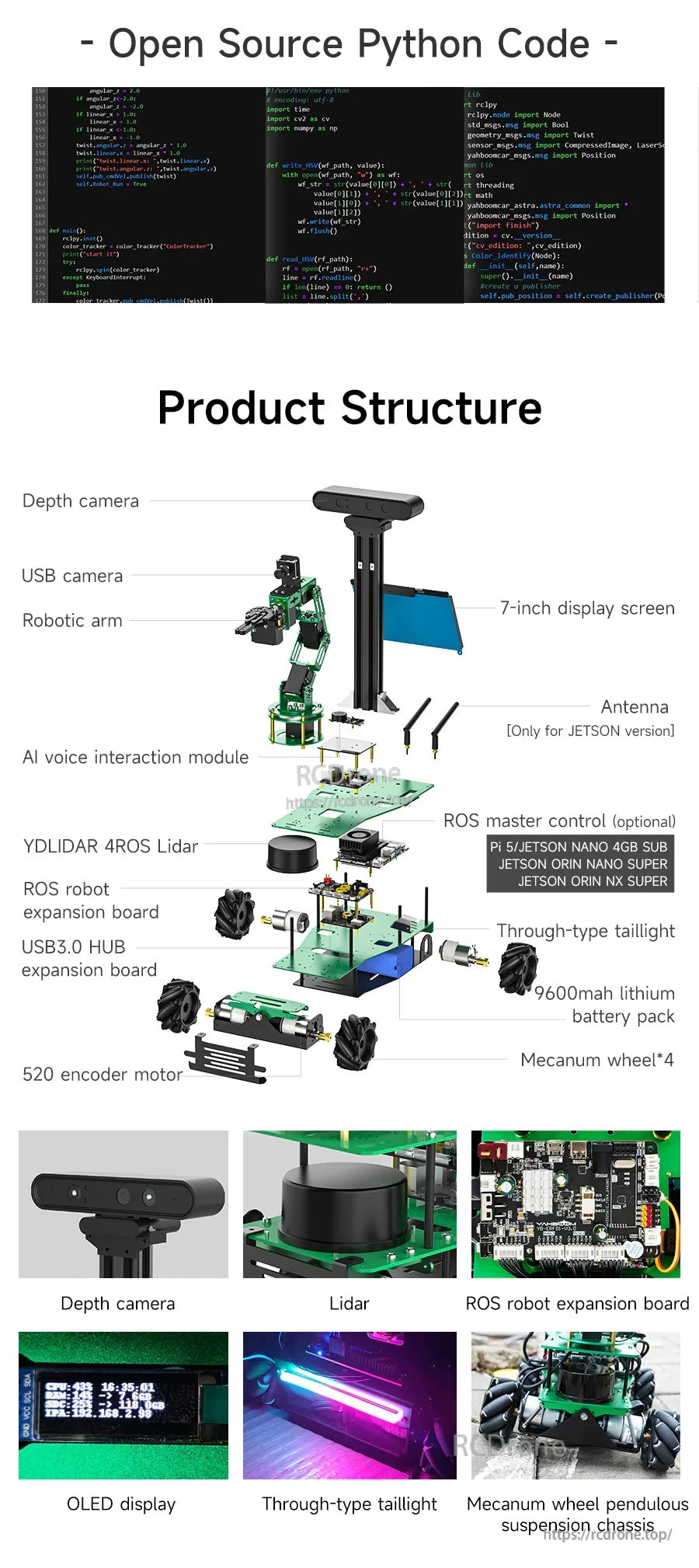
De robotstructuur van de ROSMASTER X3 PLUS combineert een 7-inch display, lidar- en cameramodules, controle-/uitbreidingsborden en mecanumwielen voor een complete bouw.
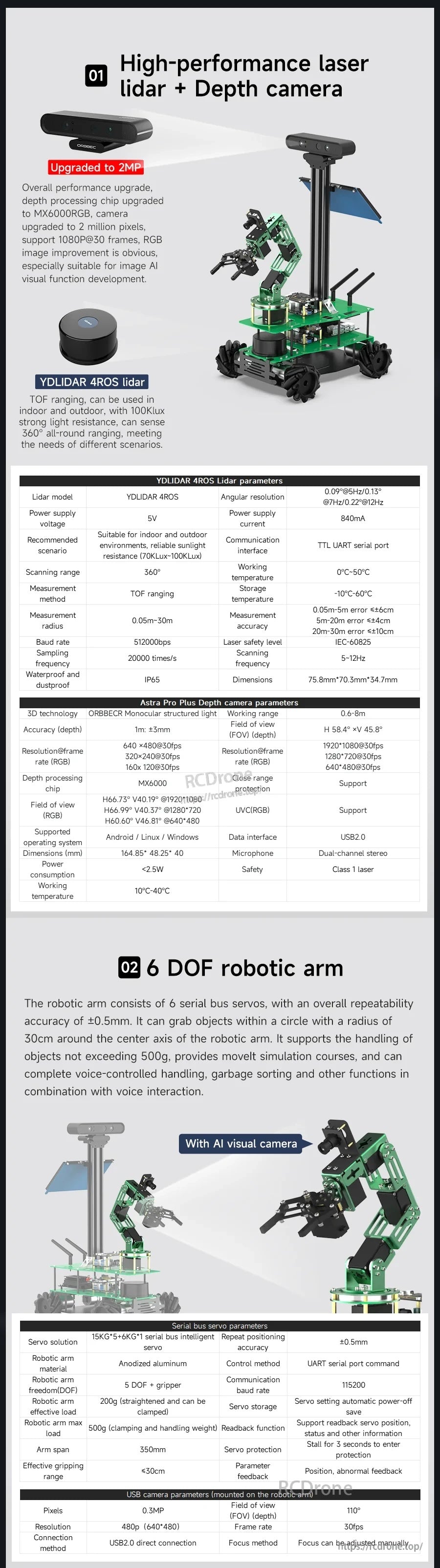
De ROSMASTER X3 Plus combineert een laser lidar en dieptecamera op een sensormast met een 6-DOF robotarm voor navigatie- en pick-and-place-experimenten.
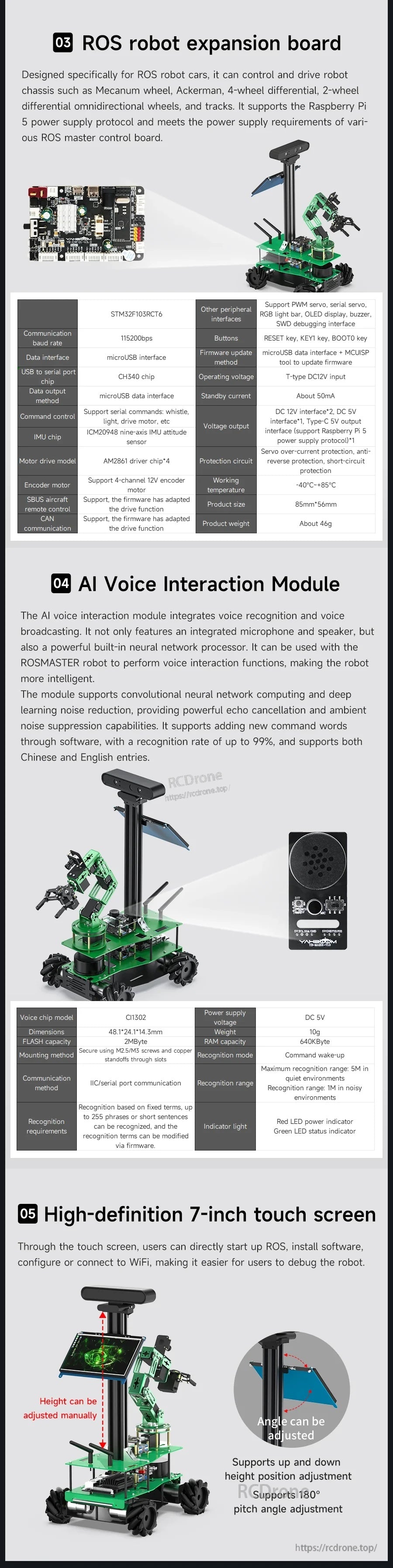
Het ROSMASTER X3 PLUS-platform ondersteunt een uitbreidingskaart, een AI-spraakinteractiemodule en een optioneel 7-inch touchscreen voor bediening en feedback.
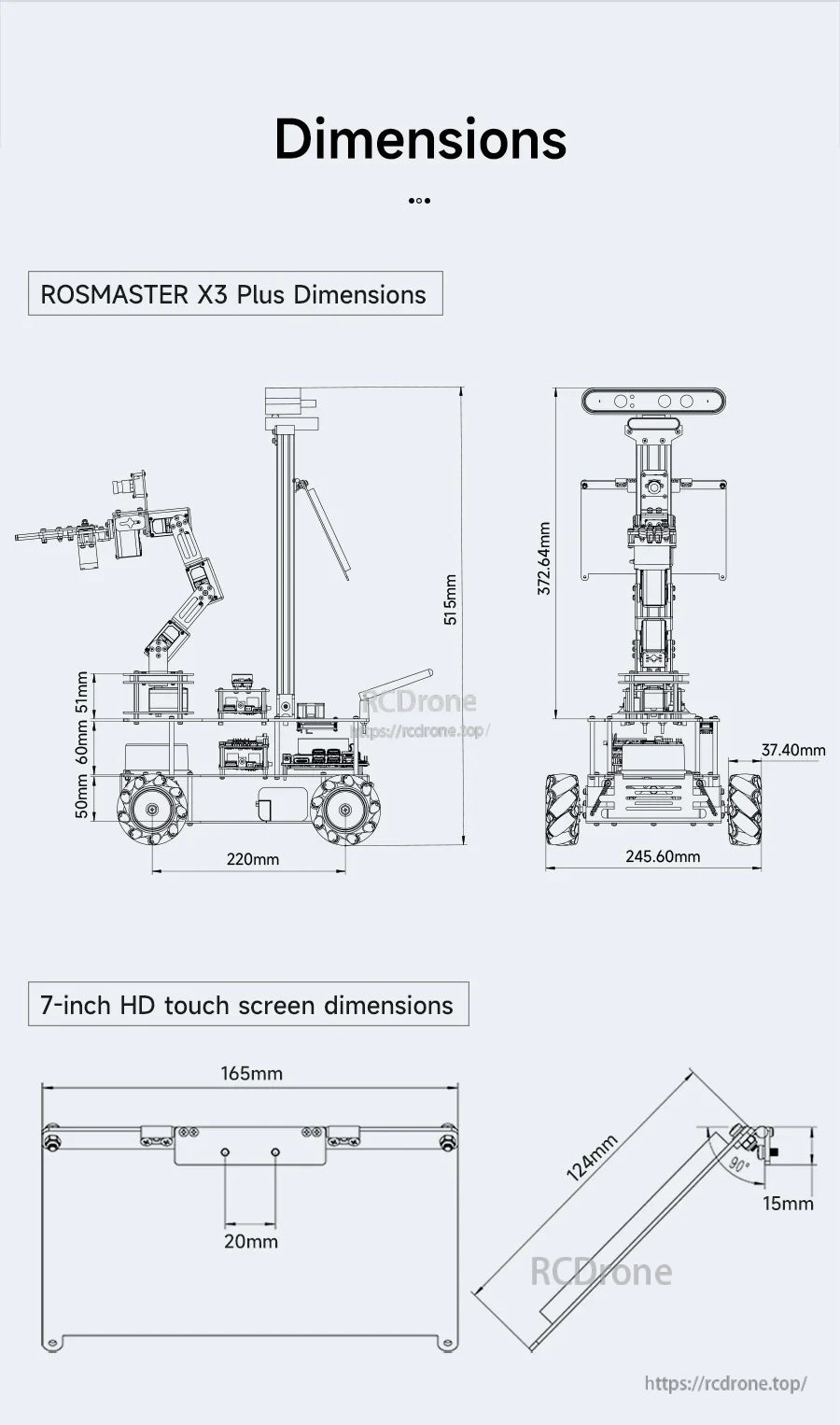
Yahboom ROSMASTER X3 Plus afmetingen diagrammen en 7-inch HD touchscreen metingen helpen bij het plannen van montage en algehele pasvorm.
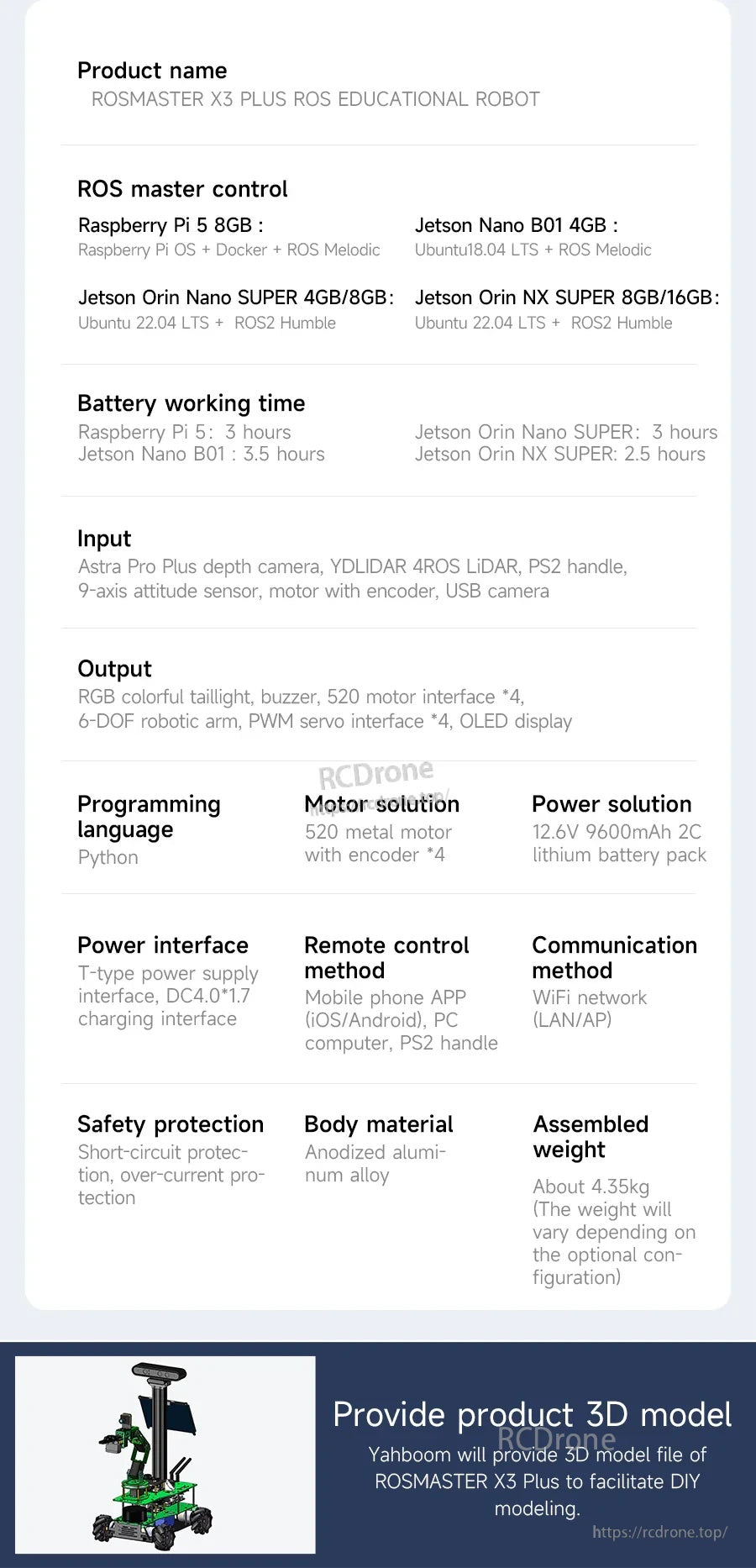
ROSMASTER X3 PLUS ondersteunt Raspberry Pi of Jetson controllers, met vermelde sensorinvoer, Wi‑Fi-communicatie en een 12.6V 6600mAh batterijpakket.
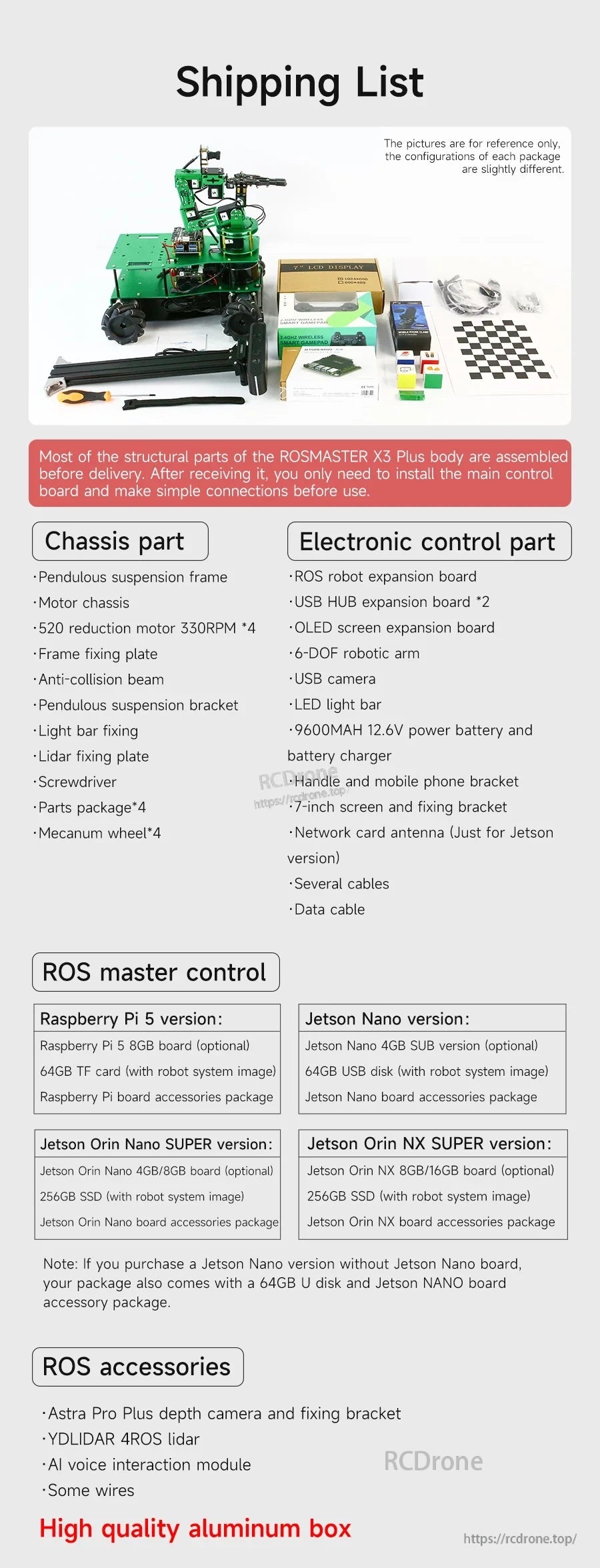
De ROSMASTER X3 Plus kit bevat de chassis hardware, elektronische besturingsonderdelen, ROS hoofdcontrole opties en accessoires zoals een camera en montagebeugel.

De Yahboom ROSMASTER X3 PLUS ROS-robot wordt geleverd met een robotarm op een chassis met wielen en een harde aluminium draagkoffer voor transport.
Related Collections




















