








Zestaw deweloperski do montażu drona CQ230 - Raspberry Pi 4B Pixhawk Ardupilot Przemysłowy programowalny zestaw do samodzielnego montażu drona typu open source ze stojakiem antykolizyjnym
Zestaw deweloperski do montażu drona CQ230 - Raspberry Pi 4B Pixhawk Ardupilot Przemysłowy programowalny zestaw do samodzielnego montażu drona typu open source ze stojakiem antykolizyjnym
RCDrone
Nie można załadować gotowości do odbioru
Przegląd
Zestaw montażowy do budowy dronów CQ230 to kompaktowy zestaw typu open source Dron DIY platforma obsługiwana przez Raspberry Pi 4B I Jastrząb kontroler lotu. Wyposażony w rozstaw osi 230 mm, ramę antykolizyjną i system zasilania 4S (16,8 V), ten dron jest idealny do nauki i eksperymentowania z programowalnymi funkcjami open-source. Platforma jest w pełni wyposażona do zadań takich jak nawigacja po punktach trasy, monitorowanie danych i strumieniowanie wideo w czasie rzeczywistym, co czyni ją doskonałym wyborem zarówno dla programistów, jak i początkujących.
Główne cechy
- Kompaktowa konstrukcja:Dzięki rozmiarom 360 mm x 360 mm x 300 mm dron idealnie nadaje się do małych przestrzeni.
- Bagażnik antykolizyjny:Pełnowęglowa rama antykolizyjna gwarantuje trwałość i ochronę.
- Integracja Raspberry Pi 4B:Ulepszono o Ubuntu 20.04 dla płynniejszej pracy i rozwoju.
- Struktura Open Source:Zasilane przez Ardupilot, obsługujący Dronekit, MAVLink i ROS.
- Programowalny Zadania:Możliwość autonomicznej nawigacji, monitorowania danych w czasie rzeczywistym i przetwarzania obrazu.
- Nawigacja według punktów orientacyjnych:Wyznaczaj trasy z dokładnością opartą na GPS-ie.
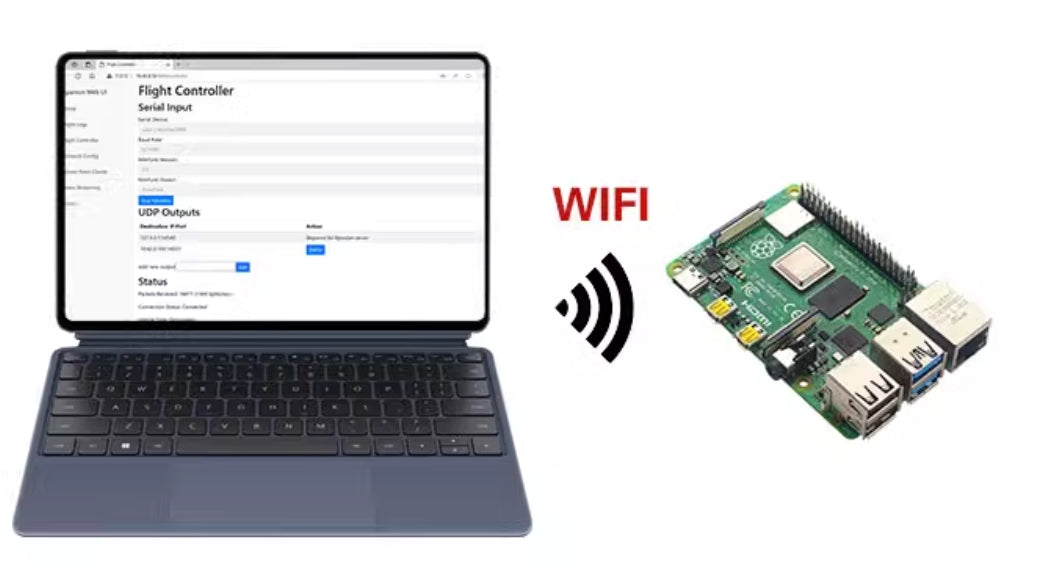
- Transmisja danych w czasie rzeczywistym:Transmisja danych do stacji naziemnych za pomocą WiFi.
- Nawigacja wizualna:Systemy z dwiema kamerami umożliwiają precyzyjną nawigację wewnątrz pomieszczeń i omijanie przeszkód.
- Programowalne sterowanie:Wykorzystaj Dronekit-Python do tworzenia niestandardowych poleceń lotu.
- Symulacja systemu:Połącz symulację SITL w celu płynnego testowania funkcjonalności.
Specyfikacje
| Parametr | Bliższe dane |
|---|---|
| Model | CQ230 |
| Rozstaw osi | 230 mm |
| Bateria | 4S (16,8 V) |
| Czas lotu | 7 minut |
| Ładowność | 200g |
| Odporność na wiatr | Poziom 3-4 |
| Maksymalna prędkość | 20 kilometrów na godzinę |
| Maksymalna wysokość lotu | 120m |
| Dokładność pozycjonowania | 2-3m (GPS) |
| Waga | 612g |
| Zasięg pilota | 700m |
Pakiet
Wersja podstawowa
- Kontroler lotu Pixhawk 2.4.8 ×1
- Nawigacja GPS M8N ×1
- Moduł zasilania Ledi MINI PIX ×1
- Telemetria WiFi CUAV ×1
- Regulator 30A ×4
- 5045 Śmigło ×4
- Rama CQ230 ×1
- Ładowarka balansująca A400 ×1
- Bateria 4S 2300mAh ×1
- Silnik 2205 ×4
- Pilot zdalnego sterowania FS-i6 ×1
- Brzęczyk alarmowy BB ×1
- Moduł przepływu optycznego MF-01 ×1
Wersja wizualna
- Wersja Pixhawk 2.4.8 Lot Cokontroler ×1
- GPS-y M8N ×1
- Moduł zasilania Ledi MINI PIX ×1
- Kamera CS ×1
- Regulator 30A ×4
- 5045 Śmigło ×4
- Rama CQ230 ×1
- Brzęczyk alarmowy BB ×1
- Moduł przepływu optycznego MF-01 ×1
- Ładowarka balansująca A400 ×1
- Bateria 4S 2300mAh ×1
- Silnik 2205 ×4
- Pilot zdalnego sterowania FS-i6 ×1
- Komputer pokładowy Raspi 4B-4G × 1 zestaw
- Kamera wizualna T265 ×1
Aplikacje
- Dostawa:Wydajny transport lekkich przedmiotów.
- Rozwój edukacyjny:Idealne dla studentów i naukowców chcących poznać systemy dronów.
- Przetwarzanie wizualne:Użyj OpenCV do zaawansowanego przesyłania strumieniowego i analizy wideo.
- Eksperymenty nawigacyjne:Eksperymentuj z autonomicznym śledzeniem lotu i pozycji opartym na GPS.
Dodatkowe uwagi
- W systemie zastosowano Ubuntu 20.04, czyli rozszerzony interfejs programistyczny.
- Solidny ekosystem Ardupilot gwarantuje skalowalność i wszechstronność w zastosowaniach dronów.
- Kompletny zestaw edukacyjny z samouczkami dla początkujących i profesjonalistów.
Bliższe dane
System dronów CQ230 Open-Source

Pixhawk: System sprzętowy dronów
Wykorzystuje kontroler Pixhawk 2.4.8, wyposażony w nowy standardowy 32-bitowy procesor STM32F427 i sparowany z barometrem 5611. Jest to niedrogi kontroler typu open source z bogatymi opcjami interfejsu.

ArduPilot: System oprogramowania dronów
Oprogramowanie drona — w zasadzie oprogramowanie sterujące — wykorzystuje powszechnie przyjęty projekt open source ArduPilot.
(ArduPilot to zaawansowany, w pełni funkcjonalny i niezawodny system oprogramowania autopilota oparty na otwartym kodzie źródłowym.)
Może kontrolować wszystkie wyobrażalne systemy dronów. Dla tych, którzy kochają technologię, drony i eksplorację, zrozumienie ArduPilot wprowadzi Cię do fascynującego i angażującego świata.

ArduPilot został zainstalowany w ponad 1 000 000 systemach dronów na całym świecie. Wyposażony w zaawansowane narzędzia do rejestrowania danych, analizy i symulacji, jest gruntownie przetestowanym i niezawodnym systemem autopilota. Jest również używany przez duże organizacje i firmy, takie jak NASA, Intel, Insitu, Boeing oraz liczne instytuty i uniwersytety na całym świecie do testowania i rozwoju.

Planista misji Naziemna stacja kontroli
Cechy:
- Narzędzia do strojenia dronów i ustawiania parametrów;
- Ustaw trasy lotu na mapach, umożliwiając dronom automatyczne podążanie ustalonymi trasami;
- Wybierz polecenia misji z menu rozwijanego, aby sterować dronem;
- Pobieranie i analizowanie dzienników;
- Przeprowadzanie symulacji z wykorzystaniem systemu SITL (Software In The Loop);
- Jeszcze więcej funkcji czeka na odkrycie, a możliwości na tym się nie kończą...


| Predefiniowane funkcje | Wersja podstawowa | Wersja wizualna |
|---|
| Rysowanie linii | ✓ | ✓ |
| Utrzymywanie wysokości, zawisanie, stabilizacja | ✓ | ✓ |
| Powrót do domu, bezpieczny powrót | ✓ | ✓ |
| Lądowanie, Lądowanie przy niskim stanie baterii | ✓ | ✓ |
| Pozycjonowanie GPS na zewnątrz i trasa lotu | ✓ | ✓ |
| Dronekit-Python Programowalne Sterowanie | ✓ | ✓ |
| Telemetria WiFi do transmisji danych w czasie rzeczywistym (zasięg ok. 5 m) | ✗ | ✓ |
| Wewnętrzne optyczne pozycjonowanie przepływu, laserowe ustalanie wysokości | ✓ | ✓ |
| Wewnętrzna podwójna nawigacja wizualna, punkty kotwiczenia MP, lot trasą, precyzyjne lądowanie z rozpoznawaniem kodu QR | ✗ | ✓ |
Nadaje się do lotów w pomieszczeniach
Kompaktowa konstrukcja o wymiarach 360 mm × 360 mm × 300 mm, idealna do zastosowań w małych przestrzeniach.

Rama z włókna węglowego, mocna i odporna na upadki

Pierścień antykolizyjny skutecznie chroni silnik i łopaty śmigła, gwarantując bezpieczeństwo lotu;

Ulepszona rozszerzalność dla rozwoju funkcjonalnego obejmującego wiele scenariuszy
Bazując na modelu podstawowym, system dodaje Raspberry Pi 4B i zintegrował system Raspberry Pi. System ten obejmuje:
- Ubuntu 20.04 (system operacyjny typu open source z interfejsem graficznym)
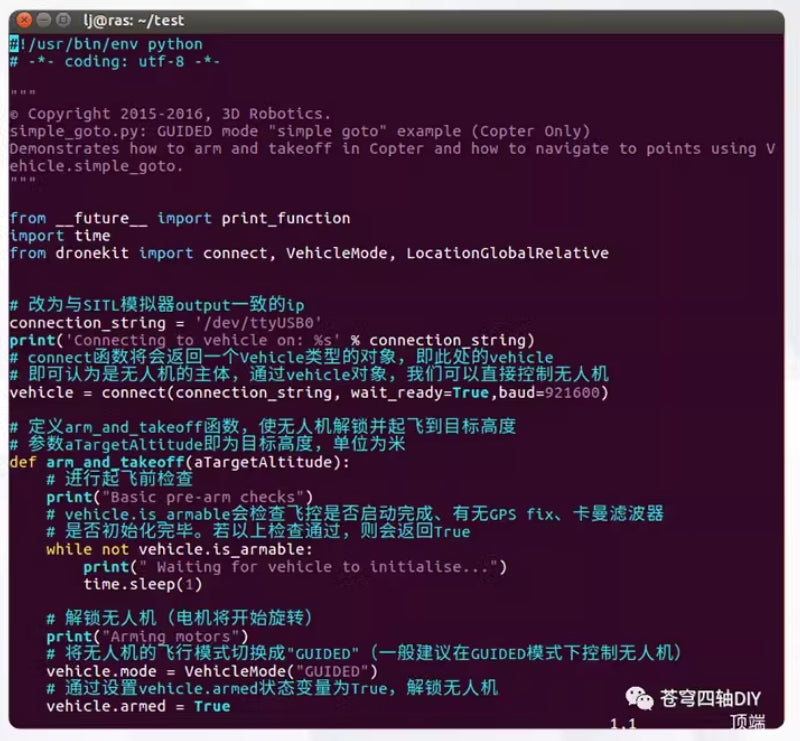
- Dronekit-Python (biblioteka Python do programowania sterowania dronami przy użyciu Dronekit)
- Pymavlink (implementacja protokołu MAVLink w Pythonie, umożliwiająca programowalne sterowanie dronem przy użyciu Pymavlink)
- ROS (System operacyjny robota)
- Mavros (protokół komunikacyjny do sterowania dronami za pomocą ROS)
- Gstreamer (transmisja strumieniowa wideo o niskim opóźnieniu)
- Router Mavlink (dystrybuuje dane kontrolera lotu MAVLink do różnych punktów końcowych)
- Otwórz CV (biblioteka oprogramowania typu open source do przetwarzania obrazu komputerowego)

Bazując na powyższym systemie, dron może osiągnąć:
- Programowalne sterowanie dronem za pomocą Dronekit-Python
2. OTWARTE CV Przetwarzanie wizualne
Dodano kamerę CSI umożliwiającą transmisję obrazu i jego przetwarzanie:
- Strumienie wizualne można przechwytywać za pomocą Raspberry Pi i przetwarzać za pomocą narzędzi takich jak OpenCV.
- Strumieniowe wideo HD w czasie rzeczywistym można również przesyłać z powrotem do komputera w celu przetworzenia lub wysyłać na urządzenie mobilne w celu przeglądu.

3. Transmisja wideo HD w czasie rzeczywistym
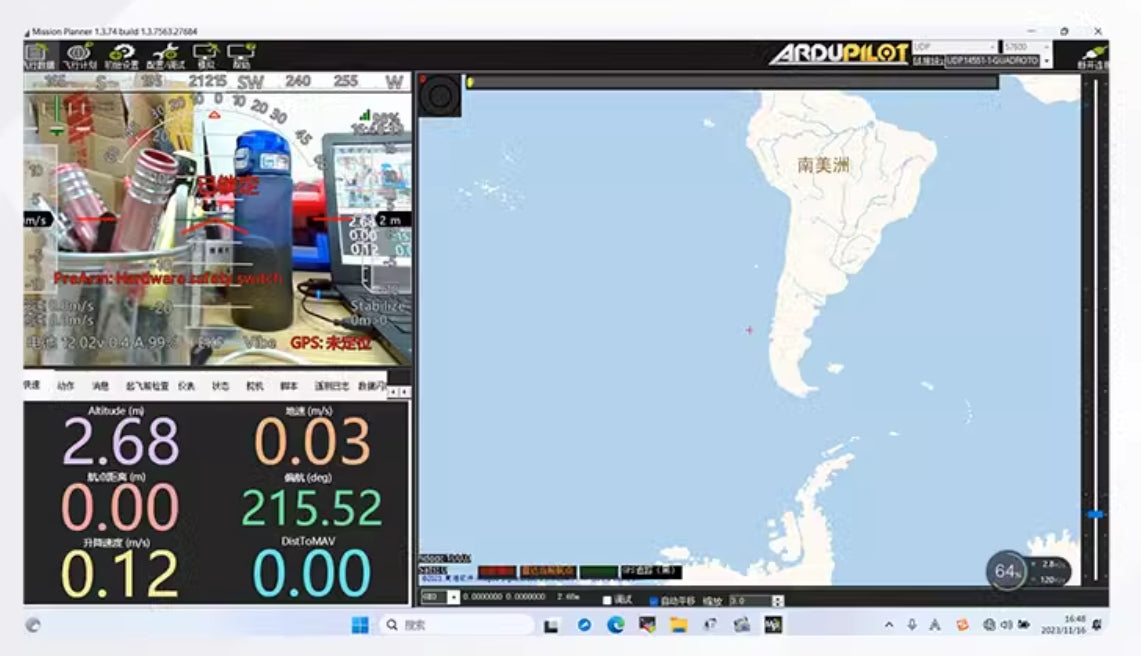
4.Monitorowanie danych stacji naziemnej
Komunikacja i transmisja obrazu pomiędzy siecią WiFi a naziemną stacją PC (MP) może być osiągnięta bez konieczności dodatkowych modułów transmisyjnych. Po połączeniu PC z hotspotem WiFi 4B, transmisja danych i obrazu może zostać zainicjowana poprzez dostęp do 10.42.0.10:3000 za pośrednictwem przeglądarki internetowej.
5. Opracowywanie dodatkowych funkcji i weryfikacja algorytmów w oparciu o powyższy system typu open source
Wersja wizualna wspierająca samouczki:
Oprócz samouczków wersji podstawowej dostępne są również samouczki wprowadzające do przetwarzania wizualnego na Raspberry Pi.
Related Collections









