-
CUAV V5+ Несущая плата Автопилот Pixhawk Контроллер полета - FPV RC Дрон Квадрокоптер Вертолет СВВП
Обычная цена $192.64 USDОбычная ценаЦена за единицу за -
Контроллер полета автопилота CUAV NEW V5+ - на базе FMU V5 Аппаратное обеспечение с открытым исходным кодом для FPV RC Drone Quadcopter Helicopter Pixhawk
Обычная цена От $554.59 USDОбычная ценаЦена за единицу за -
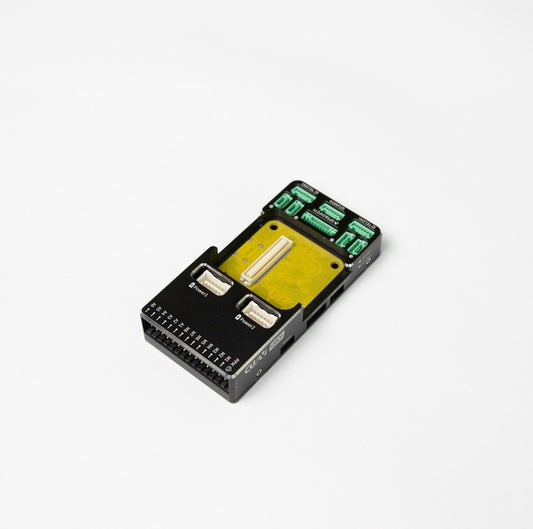
Базовая плата управления полётом CUAV V5+/X7+, Pixhawk FMU v5, STM32F765, PX4/ArduPilot
Обычная цена От $208.60 USDОбычная ценаЦена за единицу за -
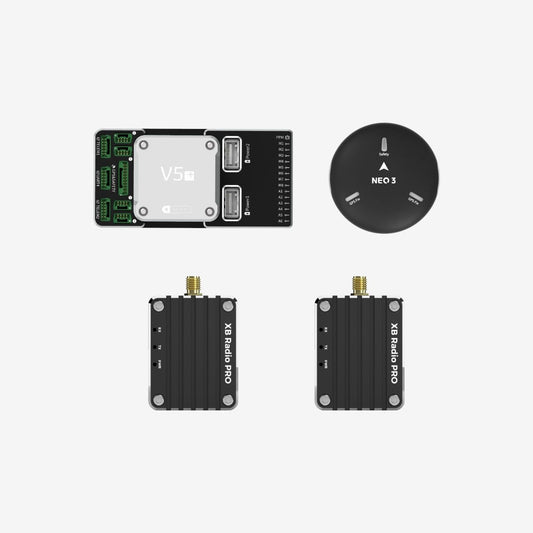
Новый комплект многороторного вертолета CUAV — автопилот V5+, контроллер полета NEO 3, GPS и набор телеметрии XBEE Pro
Обычная цена $1,066.02 USDОбычная ценаЦена за единицу за -
Комбинированный контроллер радиоданных CUAV P9 и дрона Pixhawk Fpv V5+ NEO 3 Pro с GPS-телеметрией
Обычная цена $1,645.35 USDОбычная ценаЦена за единицу за -
CUAV Новый пакет «от одной до нескольких звезд» с V5 + Flight Case RTK 9Ps GPS и комбинированный комплект радиотелеметрии P900
Обычная цена $5,056.40 USDОбычная ценаЦена за единицу за -
Новый БПЛА «один-к-множеству» с контроллером полета V5+ RTK 9Ps GPS P9 Набор радиотелеметрических комплектов GNSS
Обычная цена $3,832.45 USDОбычная ценаЦена за единицу за -
CUAV Pixhawk Drone Fpv V5+ Контроллер полета NEO 3 Pro Комбинированный модуль GPS и трубки скорости полета SKYE
Обычная цена $1,105.22 USDОбычная ценаЦена за единицу за -
CUAV NEW Pixhack Pixhawk V5+ Автопилот - FPV RC Дрон Квадрокоптер Контроллер полета вертолета и NEO V2 3 Pro GPS Combo
Обычная цена От $616.54 USDОбычная ценаЦена за единицу за -
Радиоуправляемый дрон CUAV VTOL Pixhawk с автопилотом V5 + базовая несущая плата с NEO 3 GPS и телеметрией P9 Combo
Обычная цена $1,869.14 USDОбычная ценаЦена за единицу за -
CUAV Pixhawk Drone Fpv V5+ Контроллер полета NEO 3 Pro Комбинированный модуль PMU с GPS и CAN питанием
Обычная цена $1,057.20 USDОбычная ценаЦена за единицу за -
Несущая плата автопилота CUAV CAN PDB V5+ Plus Core — контроллер полета RC Drone Pixhawk
Обычная цена $826.81 USDОбычная ценаЦена за единицу за -
CUAV НОВЫЙ Дрон БПЛА FPV V5 + Автопилот Pixhawk Контроллер полета с модулем TF Luna Radar Lidar
Обычная цена $657.82 USDОбычная ценаЦена за единицу за -
CUAV NEW V5 + Аппаратный дизайн Pixhack Pixhawk Автопилот Пульт дистанционного управления FPV RC Дрон Квадрокоптер Вертолет Транспорт
Обычная цена $408.00 USDОбычная ценаЦена за единицу за