

















SteadyWin GIM3505-8 Встроенный планетарный редуктор — модуль сустава четвероногого робота, передаточное число 8:1, 24В, CAN, IP54
SteadyWin GIM3505-8 Встроенный планетарный редуктор — модуль сустава четвероногого робота, передаточное число 8:1, 24В, CAN, IP54
SteadyWin
Не удалось загрузить сведения о доступности самовывоза
Обзор
SteadyWin GIM3505-8 встроенный планетарный редукторный мотор для суставного модуля квадропедного робота, разработанный для компактных роботизированных суставов и приводных узлов. GIM3505-8 интегрирует планетарный редуктор 8:1 с бесщеточным мотором и вариантами встроенного драйвера для обеспечения контролируемого движения квадропедных роботов, роботизированных рук, гуманоидных суставов и аналогичных мехатронных систем.
Ключевые особенности
- Совершенная планетарная передача для низкого люфта и плавного движения (люфт передачи: 15 угловых минут).
- Широкая адаптивность к напряжению: номинальное напряжение 24 В с рабочим диапазоном 12~48 В.
- Высокая плотность крутящего момента и эффективность: постоянная крутящего момента 0.52 Н·м/А с номинальным крутящим моментом 0.65 Н·м и пиковым крутящим моментом 1.27 Н·м.
- Компактные размеры: Ø43 × 23.6 мм (без драйвера); Ø43 × 30 мм (с драйвером).
- Интегрированные средства безопасности: защита от перегрева, перенапряжения и перегрузки (трехуровневая защита указана в документации к продукту).
- Интерфейс связи CAN; поддерживает отдельный энкодер и опциональный индивидуальный тормоз.
Технические характеристики
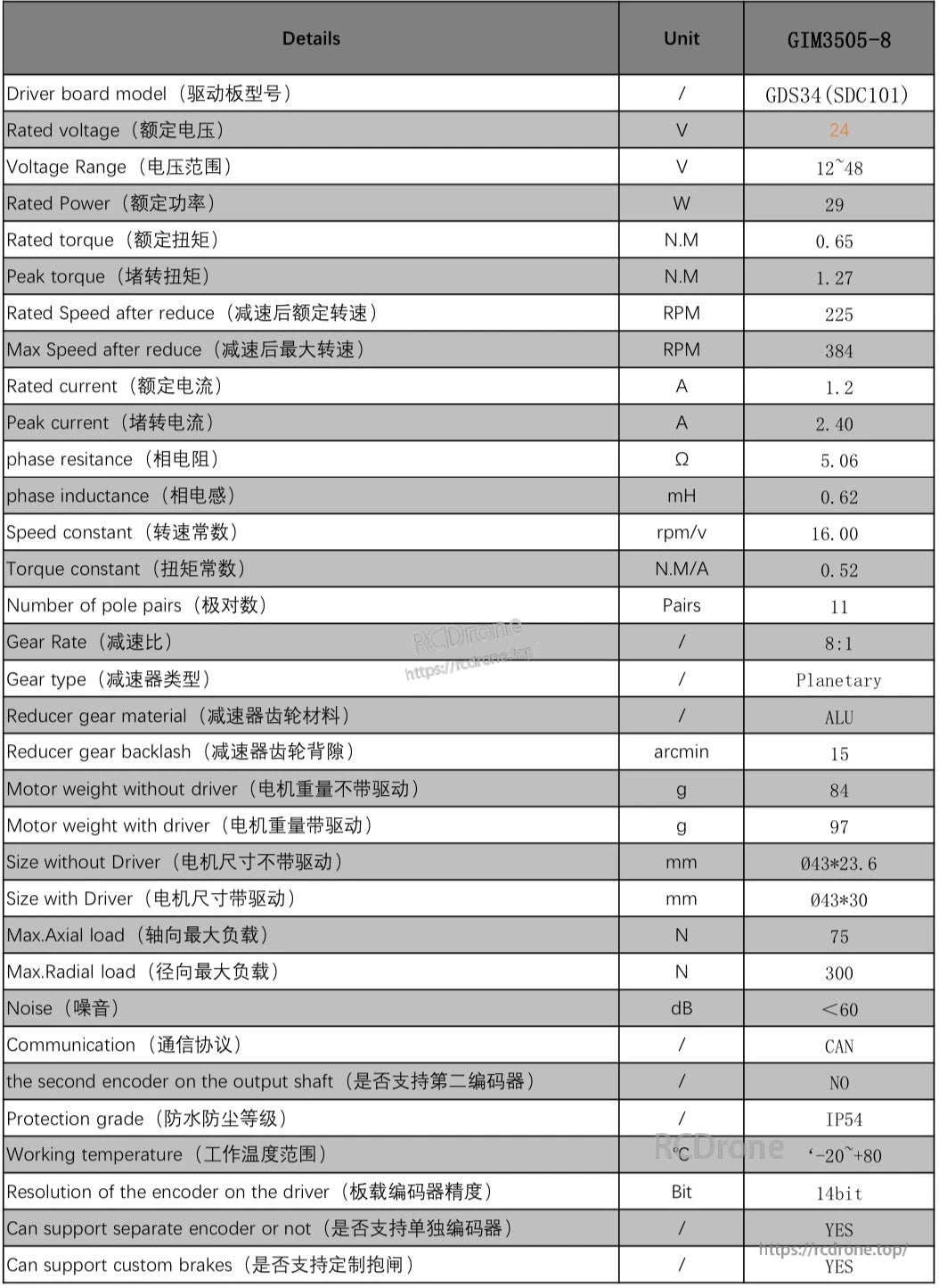
Параметр Значение ---------------------------------------- -------------------------- Модель GIM3505-8 Модель драйвера платы GDS34 (SDC101) Номинальное напряжение 24 В Диапазон напряжения 12~48 В Номинальная мощность 29 Вт Номинальный крутящий момент 0.65 Н·м Пиковый (залипший) крутящий момент 1.27 Н·м Номинальная скорость после редукции 225 об/мин Максимальная скорость после редукции 384 об/мин Номинальный ток 1.2 А Пиковый (залипший) ток 2.4 А Сопротивление фазы 5.06 Ω Индуктивность фазы 0.62 мГн Постоянная скорости 16 об/мин/В Постоянная момента 0.52 Н·м/А Количество пар полюсов 11 пар Передаточное отношение 8:1 Тип редуктора Планетарный Материал редуктора Алюминий Зазор редуктора 15 угловых минут Вес мотора (без драйвера) 84 г Вес мотора (с драйвером) 97 г Размер (без драйвера) Ø43*23.6 мм Размер (с приводом) Ø43*30 мм Максимальная осевая нагрузка 75 Н Максимальная радиальная нагрузка 300 Н Шум <60 дБ Связь CAN Второй энкодер на выходном валу НЕТ Степень защиты IP54 Рабочая температура -20°C до +80°C Разрешение энкодера на приводе 14 бит Отдельная поддержка энкодера ДА Поддержка индивидуального тормоза ДА
Применения
- Четвероногие роботы (суставы и приводы)
- Суставы гуманоидных роботов
- Роботизированные руки и манипуляторы
- Приводы экзоскелетов
- Модули управления и артикуляции AGV/AMR
- Автономные исследовательские и университетские проекты в области робототехники
Для обслуживания клиентов и технических запросов свяжитесь с [email protected].
Руководства
Детали


SteadyWin Спецификации соединения GIM3505-8: 24В, 29Вт, крутящий момент 0.65Н.М, планетарный редуктор, CAN связь, степень защиты IP54, поддерживает индивидуальные тормоза и отдельные энкодеры, работает в диапазоне -20°C до +80°C.
Related Collections

















