




Набор роботизированной руки CEREBOTO OpenArm 7DOF – DIY или собранный, с открытым исходным кодом, управление ROS/Python
Набор роботизированной руки CEREBOTO OpenArm 7DOF – DIY или собранный, с открытым исходным кодом, управление ROS/Python
CEREBOTO
Не удалось загрузить сведения о доступности самовывоза
Обзор
Роботизированная рука CEREBOTO OpenArm 7DOF является исследовательским уровнем, рука человека, предназначенная для университетов, лабораторий, стартапов и серьезных производителей. С 7 степенями свободы, досягаемостью руки 633 мм, типичной грузоподъемностью 4,1 кг и максимальной грузоподъемностью 6,0 кг на руку, OpenArm обеспечивает высокоточное движение, безопасное физическое взаимодействие и богатые инструменты с открытым исходным кодом.
Вы можете выбрать комплект аппаратного обеспечения для самостоятельной сборки или заводскую откалиброванную готовую руку. Доступны конфигурации с одной рукой, двумя руками и четырьмя руками.
Ключевые особенности
-
7DOF роботизированная рука в масштабе человека – разработана для соответствия длине человеческой руки 160–165 см для естественного манипулирования и телеприсутствия.
-
Высокая грузоподъемность &и стабильность – типичная грузоподъемность 4,1 кг, максимальная грузоподъемность 6,0 кг на руку, с легким весом руки 5,5 кг.
-
Обратимые моторы &и совместимая структура – безопасное, плавное взаимодействие для сотрудничества человека и робота и задач с контролем силы.
-
Контрольная петля CAN-FD на 1 кГц – управление в реальном времени с низкой задержкой для высокопроизводительных исследований и промышленных приложений.
-
Полностью металлическая конструкция – прочная основная структура из алюминиевого сплава и нержавеющей стали для жесткости и долговечности.
-
Аппаратное обеспечение &и программное обеспечение с открытым исходным кодом – открытые CAD, PCB, прошивка и управляющее программное обеспечение для глубокой настройки.
-
Поддержка ROS, Python и C++ – официальная интеграция ROS плюс API Python/C++ для быстрого разработки алгоритмов.
-
Богатая экосистема и расширение – поддерживает ловкие роботизированные руки, перчатки для захвата движения и мобильные базы для полных роботизированных платформ.
Технические характеристики
-
Степени свободы: 7 DOF на руку
-
Дальность руки: 633 мм
-
Типичная полезная нагрузка: 4.1 кг
-
Максимальная полезная нагрузка: 6.0 кг на руку
-
Вес руки: примерно 5.5 кг на руку
-
Материалы: алюминиевый сплав и нержавеющие стальные конструктивные части
-
Интерфейс управления: CAN / CAN-FD, UART (через включенный адаптер USB2CANFD-X2 на версиях с двойной/четверной рукой)
-
Частота управления: до 1 кГц CAN-FD цикл
-
Поддержка программного обеспечения: ROS фреймворк, Python API, C++ API
-
Эргономика: длина руки подходит для пользователей с ростом 160–165 см
Программное обеспечение &и экосистема с открытым исходным кодом
OpenArm - это полностью открытая платформа для роботизированных рук.Официальные ресурсы включают:
-
Веб-сайт: openarm.dev
-
Документация: docs.openarm.dev
-
GitHub: github.com/enactic/openarm
-
Учебное видео: официальный видеогид на YouTube для начала работы
С открытыми файлами CAD, PCB и прошивки вы можете модифицировать механику, электронику и программное обеспечение управления или расширить манипулятор новыми датчиками и захватами для ваших собственных исследовательских тем.
Типичные сценарии применения
OpenArm разработан как универсальная, высокоточная исследовательская и учебная платформа для:
-
Курсы робототехники в университетах и лабораторные эксперименты
-
Исследовательские институты и лабораторные проекты
-
Исследования в области обучения с подкреплением и физически обоснованного ИИ
-
Исследования взаимодействия человека и робота и совместной робототехники
-
Мейкерские пространства и команды по разработке открытого оборудования
-
Платформы для инженерного образования и обучения
С его размером в человеческом масштабе и совместным приводом, OpenArm идеально подходит для манипуляций, телеприсутствия, обучения подражанию, вспомогательной робототехники и многого другого.
Версии продукта &и конфигурации
Версия 1 – Набор аппаратного обеспечения для самостоятельной сборки
-
Для пользователей с хорошими практическими навыками, которые хотят глубоко понять механическую структуру.
-
Включает все механические, электрические и 3D-печатные детали; вы собираете и настраиваете руку самостоятельно, следуя инструкции.
Версия 2 – Готовая роботизированная рука
-
Для исследовательских институтов, лабораторий, компаний и образовательных учреждений, которым нужна платформа «включи и работай».
-
Полностью собрана, настроена и откалибрована перед отправкой; готова к использованию сразу после распаковки.
Доступные конфигурации рук (в зависимости от списка):
-
Набор для самостоятельной сборки – Одна рука
-
Готовая рука – Одна рука
-
Набор для самостоятельной сборки – Две руки
-
Готовые руки – Две руки
-
Набор для самостоятельной сборки – Четыре руки
-
Готовые руки – Четыре руки
Содержимое упаковки
Каждый комплект OpenArm или готовая система обычно включает в себя:
-
Основные структурные компоненты из алюминиевого сплава и нержавеющей стали
-
Двигатели, платы управления, блок питания и кабели
-
3D-печатные детали и наборы винтов
Двуручные и четырехрукие версии: одно официальное устройство, совместимое с BOM USB2CANFD-X2 (CEREBOTO является уполномоченным отечественным агентом) для связи ПК с CAN-FD.
Поддерживаемые аппаратные расширения
OpenArm поддерживает множество аппаратных дополнений (продаются отдельно), что позволяет вам создать полноценную роботизированную систему:
-
Ловкая роботизированная рука – для тонкой манипуляции и исследований захвата.
-
Набор перчаток для захвата движения – для интуитивного телеприсутствия и обучения подражанию.
-
Мобильная база – чтобы превратить OpenArm в мобильную манипуляторную платформу.
Часто задаваемые вопросы
В: Можно ли использовать роботизированную руку сразу?
О: Версия с готовой рукой полностью настроена и откалибрована на заводе — просто включите её и начните работать. Набор аппаратного обеспечения DIY требует от вас сборки и настройки системы в соответствии с инструкциями.
В: Совместим ли OpenArm с ROS или другим программным обеспечением?
О: Да. OpenArm официально поддерживает фреймворк ROS, и вы также можете управлять манипулятором через API на Python и C++.
В: Для кого предназначен этот продукт?
О: Исследователи университетов и институтов, лаборатории ИИ &и робототехники, учебные курсы, центры инженерного обучения и продвинутые любители.
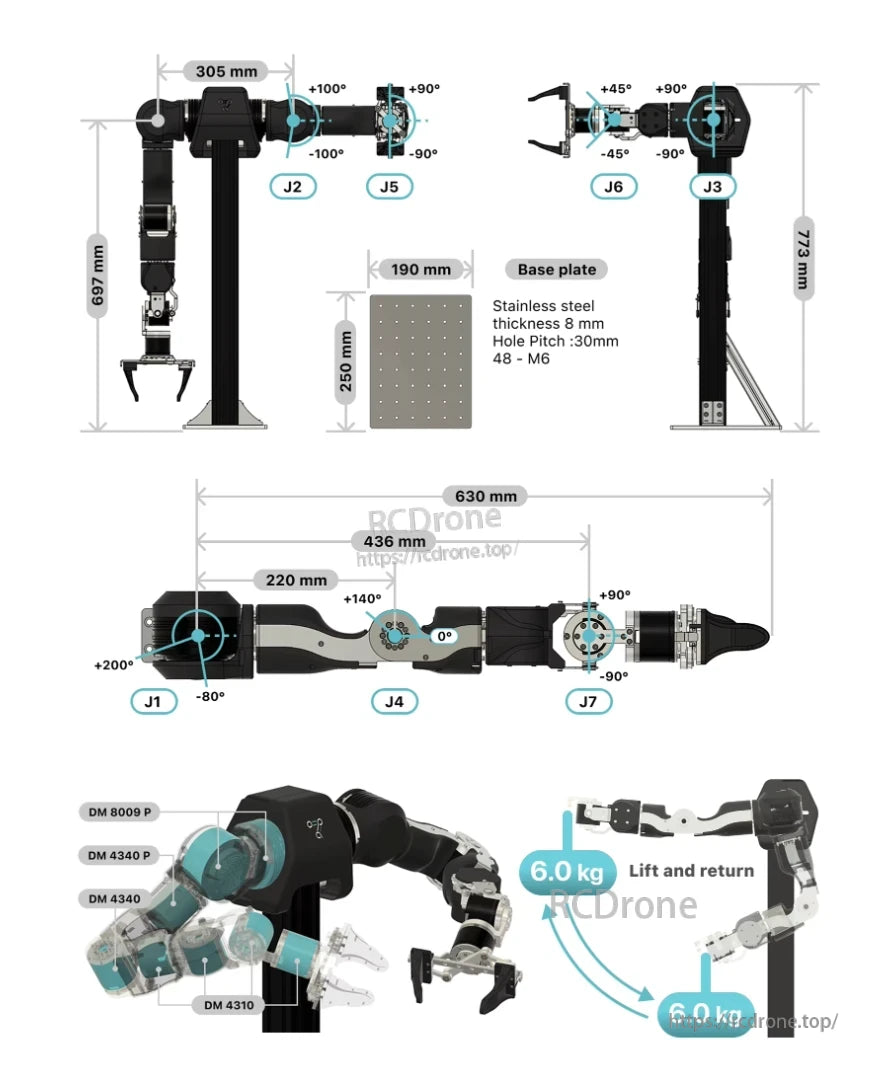
Роботизированная рука Cereboto OpenArm 7DOF имеет семь суставов (J1–J7) с определенными угловыми диапазонами. Высота составляет 697 мм или 773 мм, рабочий диапазон — 630 мм, и она устанавливается на основание из нержавеющей стали размером 190×250 мм — 8 мм в толщину с 48 отверстиями M6, расположенными с шагом 30 мм. Приводится в движение моторами DM8009P, DM4340P, DM4340 и DM4310, она справляется с нагрузками до 6,0 кг с высокой точностью. Разработана для промышленного и исследовательского использования, она сочетает в себе структурную прочность и точное управление движением.




