




CubeMars RI60 KV120 Безрамочный внутренний мотор | 0,57 Нм, 120KV, 48В BLDC для коботов и экзоскелетов
CubeMars RI60 KV120 Безрамочный внутренний мотор | 0,57 Нм, 120KV, 48В BLDC для коботов и экзоскелетов
CubeMars
Не удалось загрузить сведения о доступности самовывоза
Обзор
Мотор CubeMars RI60 KV120 безрамный инраннерный крутящий момент разработан для компактных, высокопроизводительных роботизированных приложений. Поддерживая рабочие напряжения 24V/36V/48V, этот безрамный BLDC мотор обеспечивает высокую плотность крутящего момента, плавное движение с низким крутящим моментом и точное управление с разрешением 0.01°. С компактным внешним диаметром Φ60mm и весом всего 155.9g, он идеально подходит для роботизированных рук, экзоскелетов и роботизированных суставов с ограниченным пространством.
Этот мотор оснащен ручным обмотанным статором для оптимального коэффициента заполнения меди, изогнутыми постоянными магнитами для эффективного синусоидального отклика ЭДС, а также вариантами для интеграции датчика Холла и кодера. Он поддерживает управление с ориентацией по полю (FOC), надежно работает в диапазоне температур от -20°C до 50°C и выдерживает до 1.63 Нм пикового крутящего момента. Версия с повышенной точностью ротора улучшает точность датчиков Холла, увеличивая диапазон обнаружения на 2 мм.
Ключевые особенности
-
Бескорпусная конструкция BLDC с внутренним ротором – Без внешнего корпуса, идеально подходит для встраиваемых установок
-
Высокая плотность крутящего момента – Максимальное соотношение крутящего момента к весу 10.46 Нм/кг
-
Точное управление – Совместимо с высокоразрешающими энкодерами, поддерживает 0.01° позиционирование
-
Низкий крутящий момент при зацеплении – Плавная работа, сниженная вибрация и шум
-
Устойчивость к температуре – Работает при температуре окружающей среды от -20°C до 50°C
-
Несколько интерфейсов управления – Поддерживает обратную связь от энкодера и датчика Холла
-
Ручная намотка статора – Отличное заполнение медью, 0.5мм зазор по краям для легкой сборки
-
Опциональная версия ротора – +2мм высота ротора улучшает выравнивание датчика Холла
Технические характеристики
Применение и конфигурация
| Параметр | Значение |
|---|---|
| Применение | Кобот-рука / Экзоскелет |
| Способ привода | FOC |
| Фаза | 3 фазы |
| Тип обмотки | Дельта |
| Пары полюсов | 14 |
| Класс изоляции | C |
| Напряжение изоляции | 500В 5мА/2с |
| Сопротивление изоляции | 500В 10МΩ |
| Рабочая температура | -20℃ ~ 50℃ |
Электрические характеристики
| Параметр | Значение |
|---|---|
| Номинальное напряжение (В) | 24 / 36 / 48 |
| Скорость без нагрузки (об/мин) | 2532 / 3798 / 5064 |
| Номинальная скорость (об/мин) | 1440 / 2320 / 3190 |
| Номинальный крутящий момент (Нм) | 0.57 |
| Пиковый крутящий момент (Нм) | 1.63 |
| Номинальный ток (А) | 5.6 |
| Пиковый ток (А) | 16.8 |
| Kv (об/мин/В) | 120 |
| Ke (В/коб/мин) | 9.03 |
| Kt (Нм/А) | 0.100 |
| Фазовое сопротивление (мΩ) | 900 |
| Фазовая индуктивность (μH) | 877.5 |
| Инерция (г·см²) | 33.05 |
| Км (Нм/√Вт) | 0.1054 |
| Механическая временная постоянная (мс) | 0.3 |
| Электрическая временная постоянная (мс) | 0.98 |
| Вес (г) | 155.9 |
| Соотношение крутящего момента и веса | 10.46 Нм/кг |
Опции энкодера и датчика Холла
-
С датчиком Холла: Улучшенное определение ротора, рекомендуется для высокоточной детекции положения
-
Без датчика Холла: Компактный дизайн для ограниченных пространств
-
Поддерживаемые энкодеры: Renishaw, Sick, другие высокоточные энкодеры (0.01° разрешение)
Механические размеры
| Версия | Внешний диаметр | Внутренний диаметр | Высота ротора | Максимальная толщина |
|---|---|---|---|---|
| Без датчика Холла | Ø60 мм | Ø30 мм | 15 мм | 21 мм (макс) |
| С датчиком Холла | Ø60 мм | Ø30 мм | 15 мм | 23 мм (макс) |
Смотрите технические чертежи для точных допусков и схем крепления.
Кривая производительности
Тестировано при 24VDC:
-
Максимальная эффективность при ~0.3 Нм
-
Пиковая выходная мощность >125W при ~1.1 Нм
-
Максимальная скорость ~2500 об/мин
-
Стабильный ток по всему диапазону крутящего момента
Информация о проводке и разъемах
| Провод | Цвет + Размер |
|---|---|
| U | Черный + 18# Силикон |
| V | Желтый + 18# Силикон |
| W | Красный + 18# Силикон |
| Hu | Синий + 30# Силикон |
| Hv | Зеленый + 30# Силикон |
| Hw | Желтый + 30# Силикон |
| VCC | Красный + 30# Силикон |
| GND | Черный + 30# Силикон |
Схема подключения:
Hu-U, Hv-V, Hw-W
Скачивание руководств
Применения
-
Совместные роботизированные руки
-
Суставы экзоскелета
-
Роботы на ногах и четвероногие
-
Прецизионная медицинская робототехника
-
Встраиваемые сервомодули
Детали
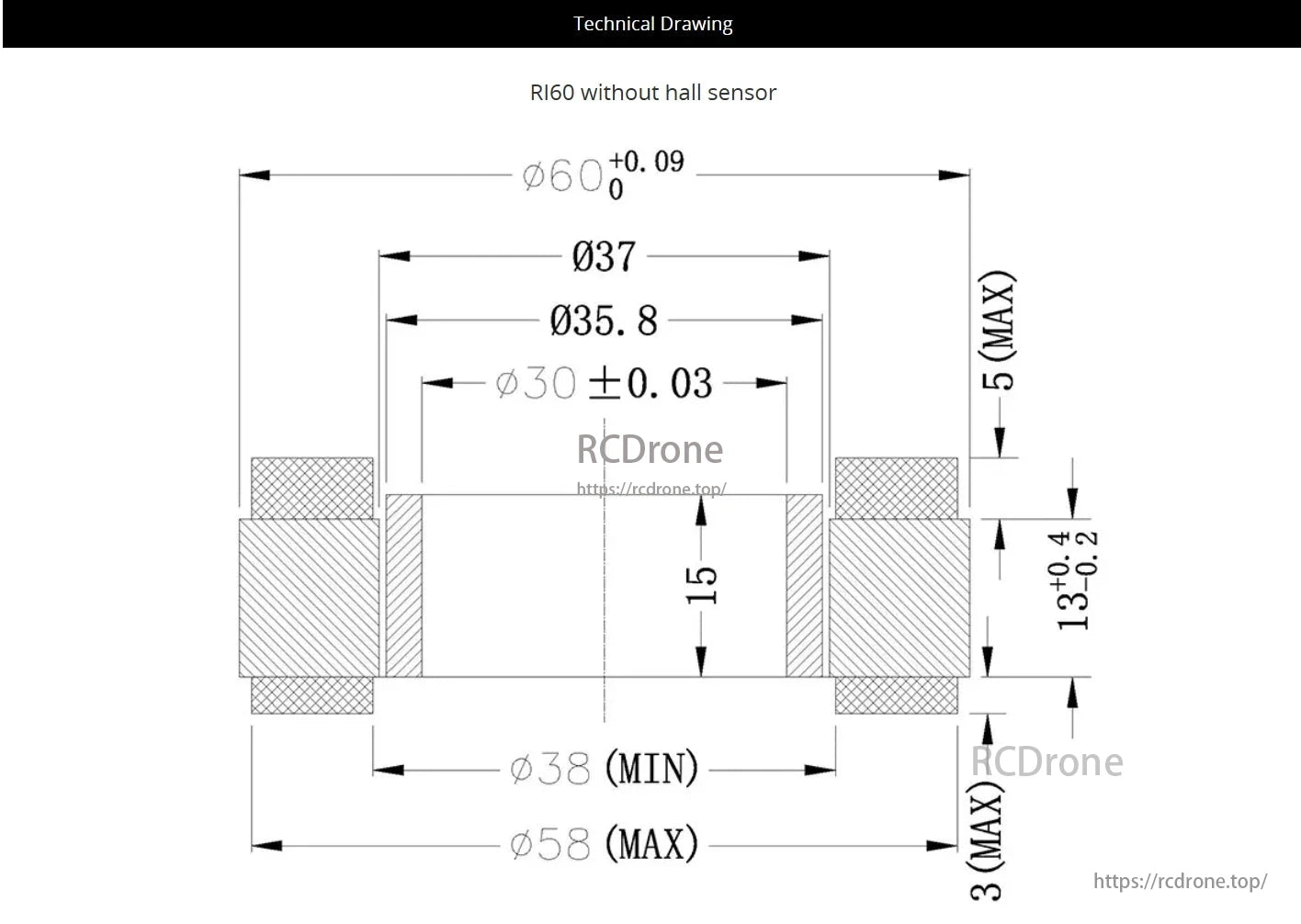
CubeMars Размеры мотора RI60: Ø60, Ø37, Ø35.8, Ø30, Ø38 (мин), Ø58 (макс), 15 длина, 5 макс высота, 13 ±0.4 ширина.
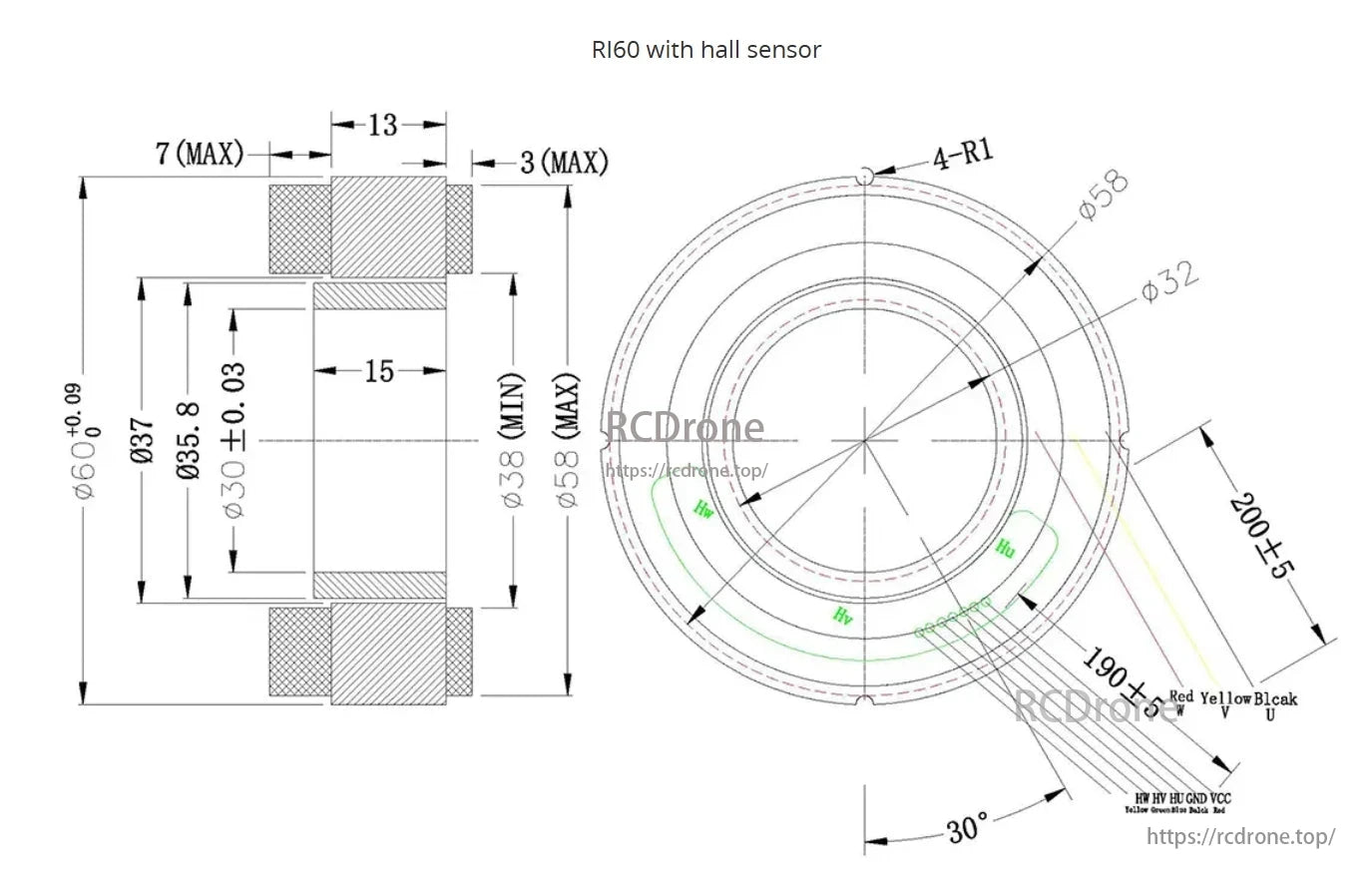
Мотор CubeMars RI60 с датчиком Холла. Размеры: диаметр 60 мм, длина 200 мм. Особенности: 4-R1, φ58, φ32 и угловые метки 30°. Включает метки HW, HV, HU.
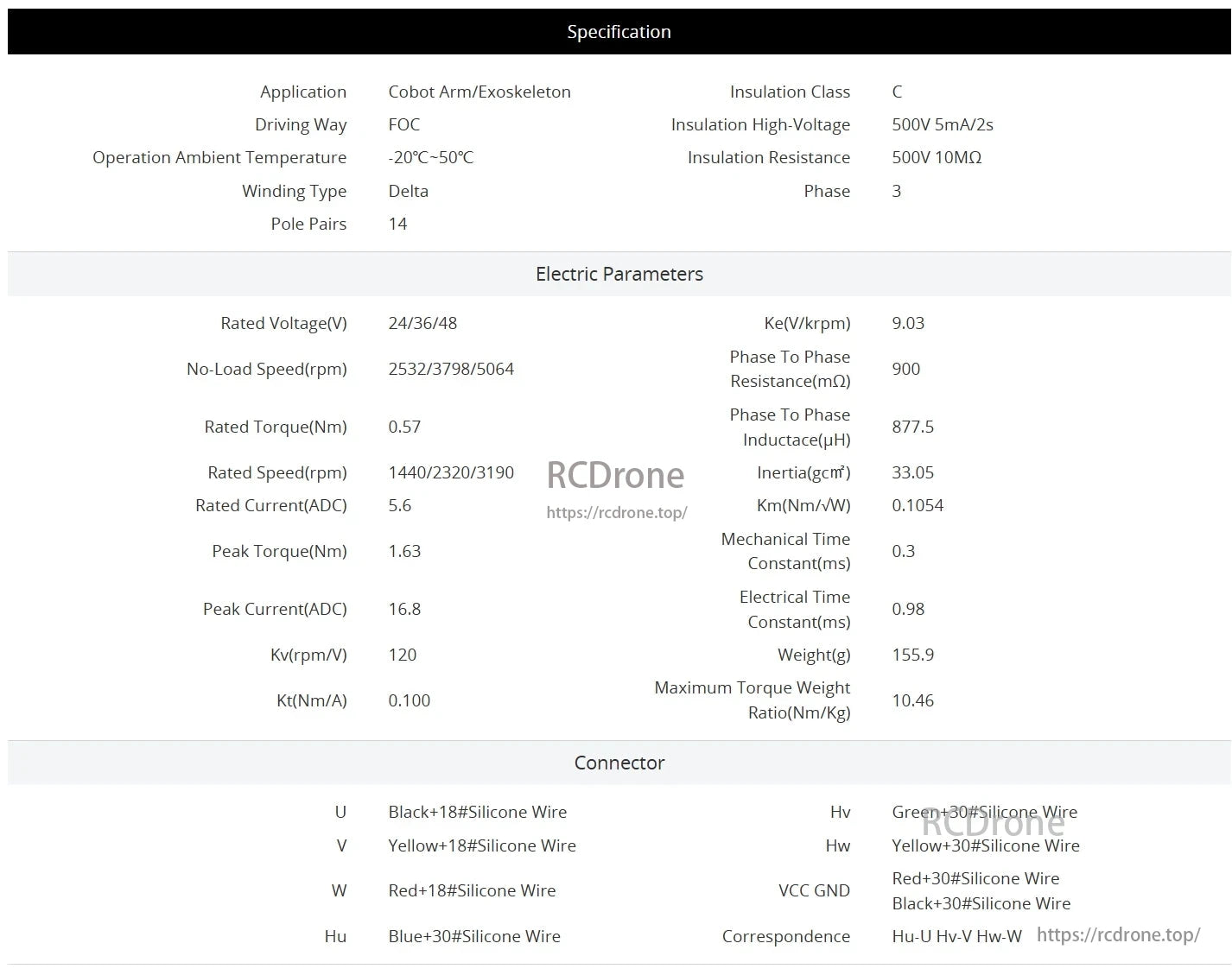
Мотор CubeMars RI60: применение в коллаборативных роботах/экзоскелетах, управление FOC, работа при температуре -20°C-50°C, 14 пар полюсов. Номинальное напряжение 24/36/48В, скорость без нагрузки 2532/3798/5064 об/мин, номинальный крутящий момент 0.57Нм, пиковый крутящий момент 1.63Нм.
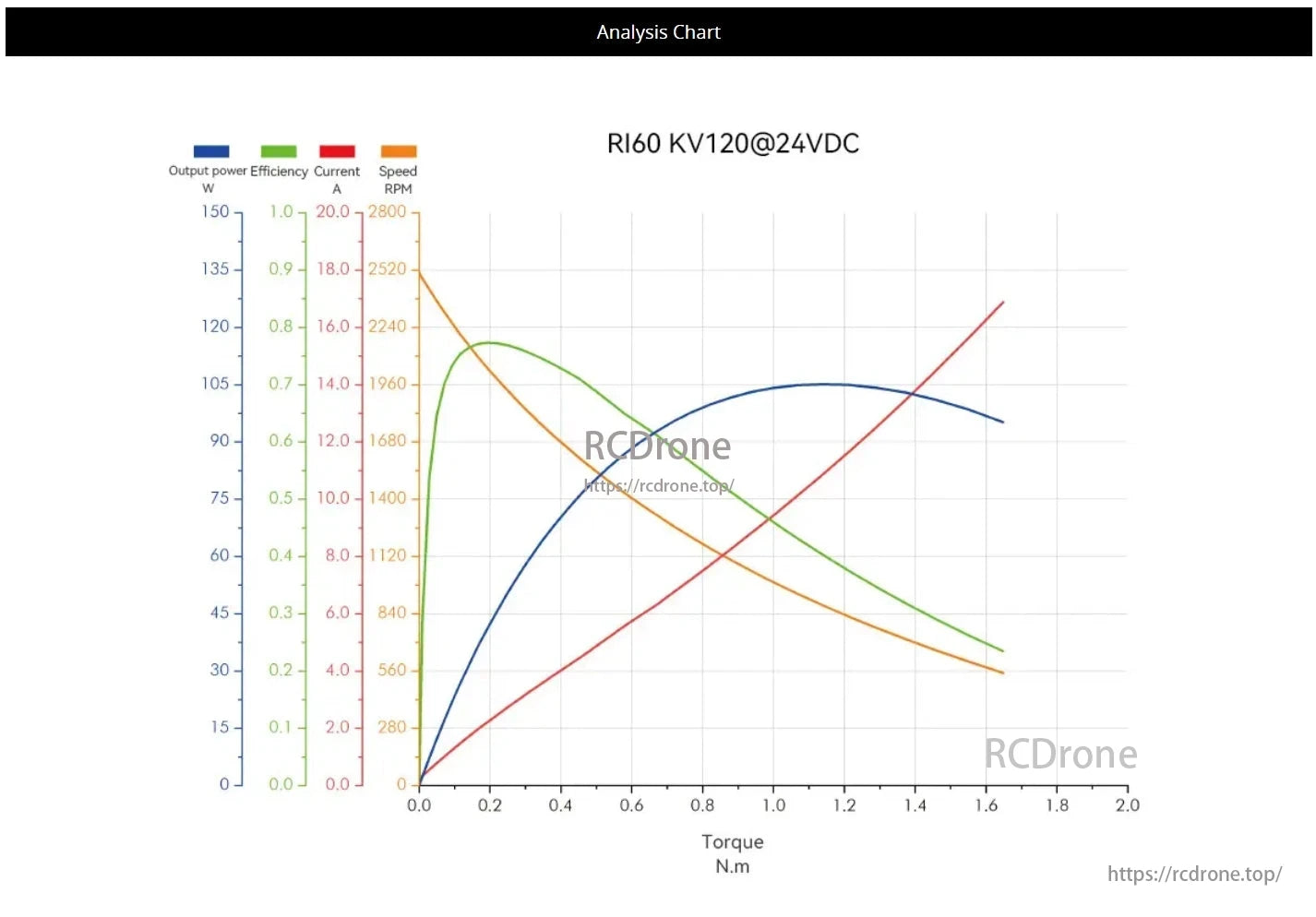
График анализа мотора CubeMars RI60 на KV120@24VDC. Dispпоказывает выходную мощность, эффективность, ток и скорость в зависимости от крутящего момента. Эффективность достигает пика около 0.2 N.m, при этом скорость уменьшается с увеличением крутящего момента.
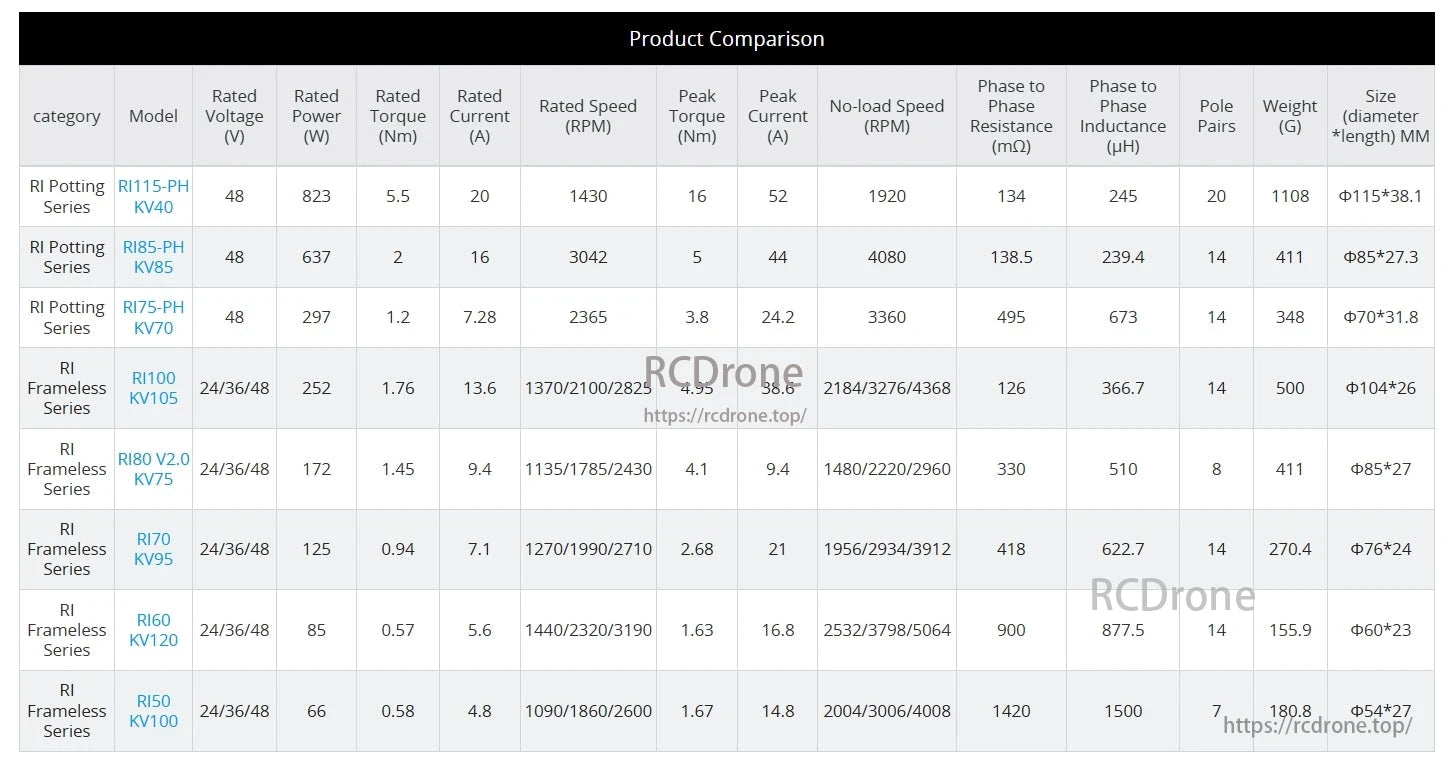
Мотор CubeMars RI60 KV120: 24/36/48В, 85Вт, крутящий момент 0.57Нм, ток 5.6А, скорость 1440/2320/3190 об/мин, пиковый крутящий момент 1.63Нм, пиковый ток 16.8А, сопротивление 900мΩ, индуктивность 877.5µH, 14 пар полюсов, вес 155.9г, размер φ60*23мм.

Мотор CubeMars RI60: Низкий крутящий момент при заедании, плавный ход, низкий уровень шума, высокая динамика.

Ручная обмотка статора с зазором 0,5 мм для оптимальной производительности.

Изогнутый постоянный магнит для конструкции мотора BEMF Sinus, обеспечивающий легкость управления.

Ротор RI60, повышенная версия. Общая высота увеличена на 2 мм для лучшего считывания датчика Холла.
Мотор CubeMars RI60: от -40°C до 85°C, варианты высокоразрешающих энкодеров.
Related Collections




